基于神经网络的移动机器人避障控制和决策
2006年第8期农业装备与车辆工程基于神经网络的移动机器人避障控制和决策
伊连云,金秀慧,贺廉云,王慧
(德州学院机电工程系,山东德州,253015)
摘要:针对移动机器人避障的特点,提出了一种基于神经网络的动态避障控制方法。介绍了避障行为的决策、基于神经网络的机器人在避障过程中的运动控制等。该方法不用考虑障碍物的运动状态,简化了机器人避障的步骤,机器人能够根据各种情况灵活地判断是否避障以及灵活地选择适当的避障方式,提高了机器人避障的灵活性和鲁棒性。仿真试验证明这种方法是可行而有效的。
关键词:移动机器人;神经网络;避障中图分类号:TP24
文献标识码:A
文章编号:1673-3142(2006)08-0022-03
MobileRobotObstacleAvoidanceControlandDecisionBasedonNeuralNetwork
YiLianyun,JinXiuhui,HeLianyun,WangHui
(DepartmentofElectromechanicEngineering,DezhouUniversity,Dezhou253015,China)
Abstract:Accordingtothecharacteristicsofthemobilerobotinobstacleavoidance,amethodofdynamicobstacleavoidancebasedonneuralnetworkispresented.Thisarticlepresentsthedecisionofobstacleavoidancebehavior,robotmovingcontrolbasedonneuralnetworkduringobstacleavoidanceprocess.Thismethoddoesnotnecessarilytakethevelocityandthedirectionoftheobstaclesintoaccount,sopredigeststheprocedureofobstacleavoidance.Therobotcanjudgeflexiblywhetheritneedstoavoidtheobstacleandcanchooseproperwaysofobstacleavoid-anceaccordingtodiversifiedcircumstances.Itimprovesflexiblyandadaptivelytherobotobstacleavoidance.Theexperimentofsimulationindicatesthatthemethodisfeasibleandvalid.KeyWords:mobilerobot;neuralnetwork;obstacleavoidance
收稿日期:2005-12-19
作者简介:伊连云(1974-),女,山东德州人,硕士,讲师,主要研究领域为自动控制及人工智能。
农业装备与车辆工程
AGRICULTURALEQUIPMENT&VEHICLEENGINEERING
2006年第8期(总第181期)
No.82006(Totally181)
0引言
随着移动机器人的应用领域不断扩大,人们希望机器人能够在未知环境中自动实现路径规划,以大大提高其对环境的适应能力。避障是移动机器人运动规划中的基本问题之一,一直以来都是机器人路径规划中的难点。根据机器人对环境信息知道的程度不同,可分为两种类型:环境信息完全知道的全局路径规划和环境信息完全未知或部分未知的局部路径规划。对于已知环境下的避碰问题,已经提出了许多有效的解决方法。其中,Khatib提出的人工势场法,结构简单,易于实现,得到了广泛应用。但人工势场法主要存在陷阱区域,栅格法空间分辨率、时间复杂度与内存容量、实时性要求之间的矛盾限制了它的使用。近年来,一些生物进化算法被用于机器人的避碰与路径规划研究,如人工神经网络、遗传算
法、模拟退火算法、蚂蚁算法等。与在已知环境中相比,机器人在环境完全未知或部分未知情况下实现避障更加困难。针对环境信息不确定情况下的避障问题,本文提出一种机器人的动态避障方法,该方法是以机器人与障碍物之间的相对运动作为决策依据,不用考虑障碍物的运动状态,简化了机器人避障的步骤;另外,机器人能够根据各种情况灵活地判断是否避障以及灵活地选择适当的避障方式,使机器人在躲避碰撞的前提下能快速地跟踪规划路径。
1避障行为的决策
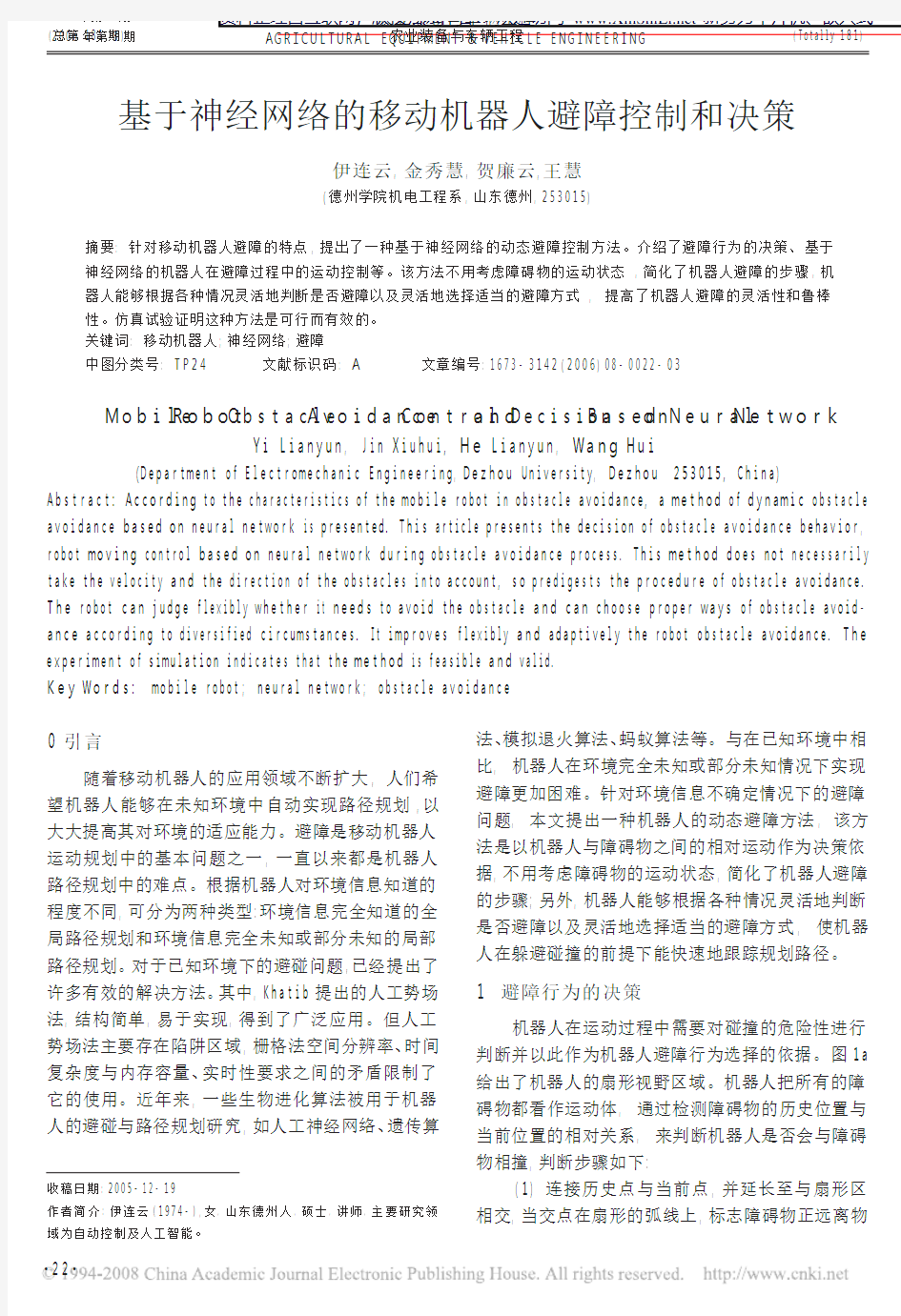
机器人在运动过程中需要对碰撞的危险性进行判断并以此作为机器人避障行为选择的依据。图1a给出了机器人的扇形视野区域。机器人把所有的障碍物都看作运动体,通过检测障碍物的历史位置与当前位置的相对关系,来判断机器人是否会与障碍物相撞,判断步骤如下:
(1)连接历史点与当前点,并延长至与扇形区相交,当交点在扇形的弧线上,标志障碍物正远离物
?22?
资料整理自互联网,版权归原作者! 欢迎访问 https://www.360docs.net/doc/f84038744.html, 新势力单片机、嵌入式
2006年8月
伊连云等:基于神经网络的移动机器人避障控制和决策
体,不需要避障。否则记录交点的位置,我们称该交点为出口点。
(2)从物体当前点向机器人与出口点同侧的边缘点引直线(圆形机器人为切线),然后求图1a上0位置到两条直线的距离,当前者大于或等于后者则不需要避障,否则选择避障。
2从屏幕坐标到扇形区的映射
人工神经网络由于具有分布式存储和并行处理结构,自组织和自学习功能以及很强的容错性和鲁棒性等优点,能够用来进行非线性逼近。因此我们采用人工神经网络对相对坐标和相对误差半径进行标定。我们采用了前馈型神经网络模型和误差反传算法。神经网络如式(1)~式(4)所示。
f(x)=
1,x≥0
0,x<"
0
(1)
式(1)为输入层与输出层的激励函数;
g(x)=
11+exp(-ax)
(2)
隐层的激励函数为Sigmoid函数,式中参数a
为可控制斜率;
hj=f(M-1
i=0
#w1ijxi-b1j)
(3)
式(3)表示隐层各单元的输出;
yk=g(L-1
j=0
$w2jkhj-b2k)
(4)
式(4)表示输出层各单元的值。
通过实验数据我们可以知道:拟合误差在屏幕
中心点(0,Ymax/2)处取得最小值;拟合点越偏离屏幕中心点,拟和误差越大;这说明当障碍物位于远距离或者侧前方时,判断是否避障难度较大,而当障碍物靠近时或者位于中心区域时判断比较容易。
3机器人在避障过程中的运动控制
为了保证机器人在避障过程中的快速性,一般
不采用减速的方法,而是通过调节ω;而在一些必要的情况下必须减速,甚至停止。当然在一些情况下可以采用直线加速的方法。因此,在图1中分为加速区、减速区、终止区和自由规划区四大部分。这几部分并不是严格分开的,有的区域相互重叠。其中A区为终止区,如果障碍物的当前点在终止区内,机器人的线速度应减为零,终止区的径向宽度由公式(5)确定:
da=(Vrmax+Vomax)×ts+a
(5)
在式中Vrmax和Vomax为机器人和障碍物的最大速度,
ts为采样时间(信息数据更新时间),a为安全系数,
一般随实际情况而定。
B区(斜线区)为加速区,并不是说障碍物在该
区内就可以加速,机器人以加速的方式避障必须满足下面两个条件:
(1)障碍物的当前点在加速区。
(2)出口点在当前点所在加速区的边线(如图1中的线段9d或者线段51)上。
如果满足条件(1)而不能满足条件(2),则按自由规划处理。
C区为减速区,减速区的功能是使机器人以最大的加速度使速度从Vrmax减到某一速度Vr,利用式6和式7可以求得减速区的宽度。
td=vmax-v
maxd
δvmax
(6)d=vmaxtd-12
δvmaxtd
2
(7)F区为自由规划区,在自由规划区内可以自由
地选择减速避障或者线速度不变避障。
下面分别求解机器人避障时的线速度变化量ΔV和角速度变化量Δω
:ΔV=(x1-x0)kts-y1-y
0
ts
(8)
图1扇形区与屏幕坐标的映射
(a)
5
6
789
B
B
F
4321
a
b
cdCA0
(b)
5
6789
0BFB
4321
abcdCA?23?
2006年第8期
农业装备与车辆工程
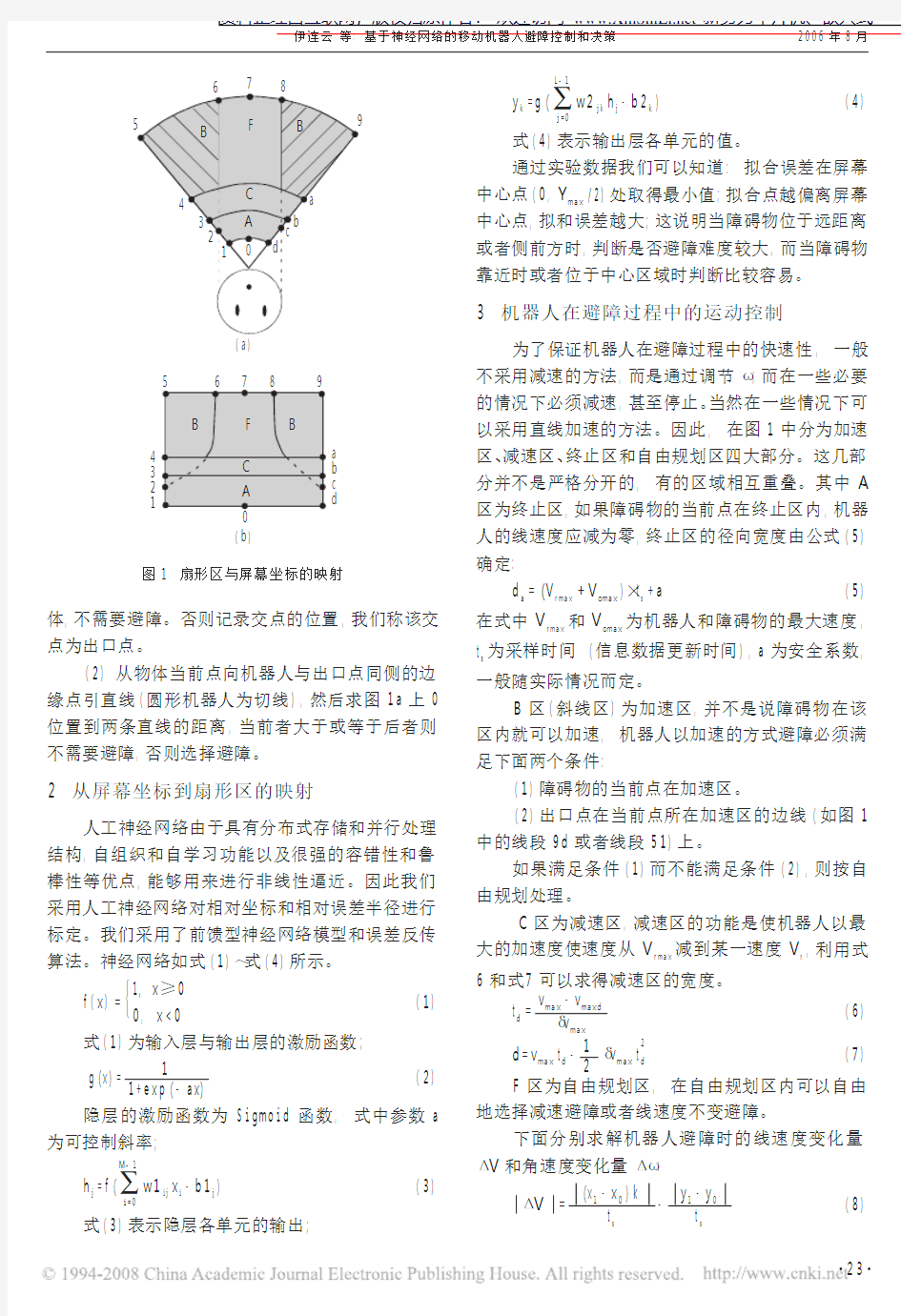
图2基于任务的动态避障仿真结果
Δω=
y1-y0kRts-x1-x
0
Rts
(9)
在上面两式中(x0,y0),(x1,y1)分别为障碍物的历史点和当前点坐标;k为从物体当前点向机器人与出口点同侧的边缘点引直线(圆形机器人为切线)的斜率。其中Δω的方向由下面方法确定:出口点在扇形区的左半区,则Δω的方向为顺时针,否则为逆时针。ΔV在加速时取正,减速时取负。
当机器人的视野中有多个障碍物时,按照就近原则进行规划。由于这种避障方法是以机器人与障碍物之间的相对运动作为决策依据,所以在避障过程中无需考虑机器人和障碍物的运动轨迹,这就使机器人的运动规划更加快捷,并且机器人的线速度和角速度随环境的变化而改变,使机器人的控制更加灵活。
4动态环境下基于任务的仿真结果
图2中给出了全自主足球机器人基于任务的动态避障仿真结果,仿真环境是对未知环境的部分模拟,从实际轨迹我们可以看出,机器人的路径尽管没有达到最优,但是却在动态的条件下完成了任务,说
明这种方法适用于移动机器人在不确定信息条件下进行路径规划。在图2(a)中给出了两个运动的障碍物,一个为直线运动,另一个为曲线运动,在图2(b)中给出了避障结果。
仿真的结果证明,动态避障方法不仅满足了机器人足球路径规划准确性、快速性和攻守兼备性的要求,而且对于移动机器人在未知环境下的探索也有一定的意义。
5结论
机器人的动态避障方法能够实现机器人的快速反应,不用考虑障碍物的运动状态,简化了机器人避障的步骤;另外,机器人能够根据各种情况灵活地判断是否避障以及灵活地选择适当的避障方式,使机器人在躲避碰撞的前提下能快速地跟踪规划路径;缺点是动态障碍物的运动速度必须局限在一定的范围以内;而且机器人只能对视野以内物体进行避撞,当障碍物在机器人视野内突然出现就进入终止区的情况往往会导致避障失败。而且,这种避障方法对目标识别速度提出了更高的要求,结合非视觉传感器信息进行避障是弥补这一不足之处的有效办法。
参考文献
[1]DannerT,KavrakiLE.Randomizedplanningforshortinspectionpaths
[A].ProceedingsoftheIEEEInternationalConferenceon
RoboticsandAutomation[C].SanFrancisco:2000.971-976.
[2]GonzalezBanosH,LatombeJC.Navigationstrategiesforexploringindoorenvironments
[J].TheInternationalJournalofRobotics
Research,2002,21(10-11):829-848
[3]LeeJH,ParkSM,ChwaKY.Searchingapolygonalroomwithadoorbyal-searcher[J].TheInternationalJournalofComputerGeometryandApplication,2000,8(2):201-220
[4]KhatibO.Realtimeobstacleavoidanceformanipulatorsandmobilerobots[J].IntJofRoboticsResearch,1986,5(1):90-98.
[5]KorenY,BorensteinJ.Potentialfieldmethodsandtheirinherentlimitationsformobilerobotnavigation[A].ProcIEEEConfRoboticsandAutomation[C].California,1991.1398-1404.
[6]MoravecHP.Sensorfusionincertaintygridsformobilerobots[J].AIMag,1988,9(2):61-74.
[7]SimonXYang,MaxMeng.Anefficientneuralnetworkapproachtodynamicrobotmotionplanning[J].NeuralNetworks,2000,13(2):143-148.[8]孙树栋,林茂.基于遗传算法的多移动机器人协调路径规划[J].自动化学报,2000,26(5):672-676.
[9]周明,孙树栋,彭炎午.基于遗传模拟退火算法的机器人路径规划[J].航空学报,1998,19(1):118-120.
[10]吴斌,史忠植.一种基于蚁群算法的TSP问题分段求解算法[J].计
算机学报,2001,24(12):1328-1333.
(a)
(b)
?24?
9.7 机器人神经网络自适应控制
声明:应部分读者的要求,本书第9章增加“机器人神经网络自适应控制”一节,图序、公式序顺延。 9.7 机器人神经网络自适应控制 机器人学科是一门迅速发展的综合性前沿学科,受到工业界和学术界的高度重视。机器人的核心是机器人控制系统,从控制工程的角度来看,机器人是一个非线性和不确定性系统,机器人智能控制是近年来机器人控制领域研究的前沿课题,已取得了相当丰富的成果。 机器人轨迹跟踪控制系统的主要目的是通过给定各关节的驱动力矩,使得机器人的位置、速度等状态变量跟踪给定的理想轨迹。与一般的机械系统一样,当机器人的结构及其机械参数确定后,其动态特性将由动力学方程即数学模型来描述。因此,可以采用自动控制理论所提供的设计方法,采用基于数学模型的方法设计机器人控制器。但是在实际工程中,由于机器人是一个非线性和不确定性系统,很难得到机器人精确的数学模型。 采用神经网络,可实现对机器人动力学方程中未知部分的精确逼近,从而实现无需建模的控制。本节讨论如何利用神经网络控制和李雅普诺夫(Lyapunov )方法设计机器人轨迹跟踪控制的问题,以及如何分析控制系统的稳定性和收敛性。 9.7.1 机器人动力学模型及其结构特性 n 关节机械手动态方程可表示为: ()()()(),d ++++=M q q V q q q G q F q ττ (9.30) 其中,n R ∈q 为关节转动角度向量,()M q 为n n ?维正定惯性矩阵,(),V q q 为n n ?维向心哥氏力矩,()G q 为1?n 维惯性矩阵,()F q 为1?n 维摩擦力,d τ为未知有界的外加干扰,n R ∈τ为各个关节运动的转矩向量,即控制输入。 机器人动力学系统具有如下动力学特性: 特性1:惯量矩阵M(q)是对称正定阵且有界; 特性2:矩阵(),V q q 有界; 特性3:()()2,-M q C q q 是一个斜对称矩阵,即对任意向量ξ,有 ()()()2,0T -=ξ M q C q q ξ (9.31)
基于神经网络的机器人模型辨识-自动化专业
第二章 神经网络 2.1神经网络基础 人的大脑中有众多神经元,它们连接在一起组成复杂的神经网络,因此大脑拥有高级的认知能力。人工神经网络实际上是对人大脑处理信息方法的简单化。 2.1.1神经网络概述 神经网络是推广众多简单处理单元构成的一种非线性动力学系统,能够大规模地进行信息分布式存储和并行处理。同时神经网络具有自学习的能力,当外界的环境发生了改变,神经网络经过训练能够在外界信息的基础上自动调整内部结构,对于给定的输入可以得到期望输出。 由图可知,神经元是一种性质为多输入单输出的系统,是由n 个输入i x 和一个输出j y 组成。 图2-1 神经元结构 j u :第j 个神经元的状态; j :第j 个神经元的阈值; i x :第i 个神经元的输入信号; ji w :第i 个神经元到第j 个神经元的连接权系数; 其中:激发状态时ji w 取正数,抑制情况下ji w 取的是负值;
j s :第j 个神经元的外部输入信号。 输出可以表示为 1n j ji i j j i Net w x s θ==+-∑ (2.1) ()j j u f Net = (2.2) ()()j j j y g u h Net == (2.3) 一般(.)g 是单位映射,也就是说()j j g u u = 。 j Net 表示第j 个神经元的输入; (.)f 表示第j 个神经元的激励函数; (.)g 表示第j 个神经元的输出函数。 激活函数往往采用这三种函数: (1)二值函数(阈值型): 1,0()0,0x f x x >?=?≤? (2.4) (2) S 型函数: 1 ()1x f x e α-= +,0()1f x << (2.5) (3)双曲正切函数: 1()1x x e f x e αα---=+,1()1f x -<< (2.6) 2.1.2神经网络的分类 以连接方式对神经网络可分为两大类:一是没有反馈的前向网络,二是相互结合型网络(含有反馈网络)[10]。 (1)前向神经网络
全向移动机器人的运动控制
全向移动机器人的运动控制 作者:Xiang Li, Andreas Zell 关键词:移动机器人和自主系统,系统辨识,执行器饱和,路径跟踪控制。 摘要:本文主要关注全向移动机器人的运动控制问题。一种基于逆运动学的新的控制方法提出了输入输出线性化模型。对执行器饱和及驱动器动力学在机器人性能体现方面有重要影响,该控制法考虑到了以上两个方面并保证闭环控制系统的稳定性。这种控制算法常用于真实世界的中型组足球机器人全方位的性能体现。
1.介绍 最近,全方位轮式机器人已在移动机器人应用方面受到关注,因为全方位机器人“有一个满流动的平面,这意味着他们在每一个瞬间都可以移动,并且在任何方向都没有任何调整”。不同于非完整的机器人,例如轮式机器人,在执行之前具有旋转任何所需的翻译速度,全方位机器人具有较高的机动性并被广泛应用在动态环境下的应用,例如在中型的一年一度的足球比赛。 大多数移动机器人的运动控制方法是基于机器人的动态模型或机器人的运动学模型。动态模型直接描述力量施加于车轮和机器人运动之间的关系,以外加电压的每个轮作为输入、以机器人运动的线速度和角加速度作为输出。但动态变化所造成的变化的机器人惯性矩和机械组件的扰动使控制器设计变得较为复杂。假设没有打滑车轮发生时,传感器高精度和地面足够平坦,由于结构的简单,因而运动模型将被广泛应用于机器人的设计行为中。作为输入运动学模型是机器人车轮速度,输出机器人的线速度和角速度,机器人的执行器的动力都快足以忽略,这意味着所需的轮速度可以立即达到。然而,该驱动器的动态极限,甚至降低了机器人在真实的情况中的表现。 另一个重要方面是机器人控制的实践:执行器饱和。因机器人轮子的指挥电机速度是有饱和的界限的,执行器饱和能影响到机器人的性能,甚至使机器人运动变得不稳定。 本文提出了一个全方位的机器人的一种运动控制方法,这种控制方法是基于逆输入输出的线性的运动学模型。它需要不仅考虑到驱动器动力学的识别,但也需要考虑到执行器饱和控制器的设计,并保证闭环控制系统系统稳定性。 本文其余的部分:在2节介绍了运动学模型的一个全方位的中型足球机器人;在3节介绍了路径跟踪与定位跟踪问题基于逆运动学模型的输入输出线性化的解决方法,其中包括执行器饱和分析;4部分介绍了动态识别器及其在控制性能方面的影响;最后的实验结果和结论讨论部分分别在5和6。
一种由Matlab仿真控制的自主移动机器人模拟器(英文)
A Matlab-based Simulator for Autonomous Mobile Robots Abstract Matlab is a powerful software development tool and can dramatically reduce the programming workload during the period of algorithm development and theory research. Unfortunately, most of commercial robot simulators do not support Matlab. This paper presents a Matlab-based simulator for algorithm development of 2D indoor robot navigation. It provides a simple user interface for constructing robot models and indoor environment models, including visual observations for the algorithms to be tested. Experimental results are presented to show the feasibility and performance of the proposed simulator. Keywords: Mobile robot, Navigation, Simulator, Matlab 1. Introduction Navigation is the essential ability that a mobile robot. During the development of new navigation algorithms, it is necessary to test them in simulated robots and environments before the testing on real robots and the real world. This is because (i) the prices of robots are expansive; (ii) the untested algorithm may damage the robot during the experiment; (iii) difficulties on the construction and alternation of system models under noise background; (iv) the transient state is difficult to track precisely; and (v) the measurements to the external beacons are hidden during the experiment, but this information is often helpful for debugging and updating the algorithms. The software simulator could be a good solution for these problems. A good simulator could provide many different environments to help the researchers to find out problems in their algorithms in different kinds of mobile robots. In order to solve the problems listed above, this simulator is supposed to be able to monitor system states closely. It also should have flexible and friendly users’ interface to develop all kinds of algorithms. Up to now, many commercial simulators with good performance have been developed. For instance, MOBOTSIM is a 2D simulator for windows, which provides a graphic interface to build environments [1]. But it only supports limited robot models (differential driven robots with distance sensors only), and is unable to deal with on visual based algorithms. Bugworks is a very simple simulator providing drag-and-place interface [2]; but it provides very primitive functions and is more like a demonstration rather than a simulator. Some other robot simulators, such as Ropsim [3], ThreeDimSim [5], and RPG Kinematix [6], are not specially designed for the development of autonomous navigation algorithms of mobile robots and have very limited functions. Among all the commercial simulators, Webot from Cyberbotics [4] and MRS from Microsoft are powerful and better performed simulators for mobile robot navigation. Both simulators, i.e. Webots and MRS, provide powerful interfaces to build mobile robots and environments, excellent 3-D display, accurate performance simulation, and programming languages for robot control. Perhaps due to the powerful functions, they are difficult to use for a new user. For instance, it is quite a boring job to build an environment for visual utilities, which involves shapes building, materials selection, and illumination design. Moreover, some robot development kits have built-in simulator for some special kinds of robots. Aria from Activmedia has a 2-D indoor simulator for Pioneer mobile robots [8]. The simulator adopts feasible text files to configure the environment, but only support limited robot models. However, the majority of commercial simulators are not currently supporting On the other hand, Matlab
移动机器人控制系统的发展方向
移动机器人控制系统的发展方向 摘要随着计算机技术、传感器技术的不断发展,对于机器人领域的发展具有一定的促进作用。而由于移动机器人具有能够自治与移动的特征,在机器人领域处于核心地位。在复杂、危险的环境中,移动机器人所发挥的作用是有目共睹的。对此,对当前国内外较为常见的移动机器人控制系统进行剖析,并在此基础上论述了该领域的未来发展方向。 【关键词】移动机器人控制系统发展方向 移动机器人属于能够自动执行工作任务的机器,不但能够按照事先编译的程序运行,同时人类还可对其指挥。当前主要被运用在生产业、建筑业以及航空航天领域,而该领域的发展情况直接关系到国家综合实力的提升速度,对此加强对移动机器人控制系统的发展情况,以及未来发展方向的研究势在必行。 1 国内外常见的移动机器人控制系统 相对于国内在移动机器人的研究状况,能够看出国外在该领域的研究是较早的,其中具有代表性的有Saphira、TeamBots以及ISR。而在国内方面,代表性的有OSMOR、ZJMR以及Agent。下面,便对较为常用的控制系统进行介绍:
1.1.1 Saphira控制系统 Saphira控制系统是移动机器人领域中最早的系统,是有SRI国际人工智能中心在1990年所研发的,此系统是基于本地感知空间的共享内存与黑板,来实现协调与通信进程。由于Saphira是采用C语言来进行开发的,同时支持Windows 与Unix系统,因此具有文档资料相对完整、系统资源占用少等特征。但是需注意的是,由于Saphira系统在定位方面无法达到当前的实际需求,因此运用是相对较少的。 1.1.2 TeamBots控制系统 本系统是基于Java包与Java应用程序而构建的,经过20余年的发展后,此系统截止到目前已经被运用到多种类型的机器人平台当中。除此之外,在适用的操作系统方面,其中具有代表性的有Windows、MacOS以及Linux等,因此其运用的范围是更加广泛的。 1.1.3 ISR控制系统 ISR是基于行为的控制模式,其中是有任务执行层、反映层以及推理层所构成的,是有CAS研究中心所研发的。其中,任务执行层的作用是执行推理层所传输的指令;反映层其中包含资源、控制器以及行为;推理层的功能是根据用户的指令来对决策进行制定。此外,ISR控制系统仅能够在Linux中进行操作,并且没有公开化使用。
移动机器人控制软件的设计与实现
移动机器人控制软件的设计和实现
作者:李晓明 文章来源:https://www.360docs.net/doc/f84038744.html, 更新时间:2006-8-9 17:25:55 点击数: 2742
简介:现在做一个移动机器人是很容易的一件事,车体自己可以加工,或买现成的;避障可以用超声阵列;
导航可以用激光测距 LMS;定位可以用电子地图加 LMS 加陀螺仪;然而控制软件却只能自己编写。本文 或许可以给你一些启示。
相关链接 基于 VIA 平台的移动机器人
移动机器人的使用现在非常多,做一个移动机器人似乎也很容易,车体自己可以加工,也可以去 买现成的;避障可以用超声阵列;导航可以用激光测距 LMS;定位可以用电子地图加 LMS 加陀 螺仪;驱动可以用各种电机及配套驱动器或者自己做;通讯可以去买现成的无线通讯模块,可以 是数字的,也有模拟的;大范围定位可以用 GPS 模块,也是现成的;至于什么红外,蓝牙,甚 至计算机视觉都可以去市场上买,但是(然而)为什么做一个移动机器人还是这么难呢?尤其是 对一个新手而言。一个老外说过,硬件是现成的,软件算法杂志里有的是,很多可以在网上当, 但即使是一个博士生也要花费很长的时间完成一个实际可用的移动机器人。为什么?因为机器人 使用的困难在使用软件的设计上。前面那个老外也说过,现在什么都可以在网上当,唯独使用程 序不能。有过自己写移动机器人程序的人可能会理解这段话,当然也仅仅是可能,因为不排除有 很多机器人大拿一上来就可以写出很棒的移动机器人软件。
移动机器人的控制软件开发是和硬件紧密相关的,甚至和机器人的体系结构也密切相关,同样是 移动机器人,有的是用 PC 控制的,有的是用多个嵌入式系统实现的,有的则是多机器人协同工 作的,操作系统有人会用 DOS,有人会用 Windows,有人会用 Linux,有人会用 Embeded Operation System。硬件平台有的用 x86,有的用 ARM 芯片,有的会用 DSP,通讯里面会 有串口,TCP/IP 网络,无线以太网,红外,蓝牙等,甚至驱动机构也不一样,有的是用腿,有
神经网络α阶逆系统控制方法在机器人解耦控制中的应用
文章编号 2 2 2 神经网络Α阶逆系统控制方法在机器人解耦控制中的应用Ξ 戴先中孟正大沈建强阮建山 东南大学自动控制系南京 摘要 本文利用神经网络Α阶逆系统线性化解耦能力 将严重耦合的多自由度机械手解耦成多个二阶积分子系统 进一步采用线性系统设计方法对已解耦系统设计闭环控制器 成功地实现了位置快速跟踪 该控制方法不需要知道机器人系统的精确数学模型 并且结构简单 易于工程实现 关键词 机器人 神经网络 逆系统 多变量解耦 中图分类号 ×° 文献标识码 ΡΟΒΟΤΔΕΧΟΥΠΛΙΝΓΧΟΝΤΡΟΛΒΑΣΕΔΟΝΑΝΝ ΑΤΗ?ΟΡΔΕΡΙΝ?ΕΡΣΕΣΨΣΤΕΜΜΕΤΗΟΔ ? ÷ 2 ∞ 2 ≥ ∞ 2 2 ΑυτοματιχΧοντρολΕνγ Δεπτ οφΣουτηεαστΥνι? Ναν?ινγ Αβστραχτ Α 2 √ √ ? ∏ ?? ∏ ≥ ≥ ∏ × √ ∏ ∏ ∏ 2 √ √ ∞? ∏ √ ∏ ? ∏ ∏ ∏ Κεψωορδσ ∏ √ ∏ √ ∏ 1引言 Ιντροδυχτιον 由于多自由度机械手模型的非线性和强耦合性 机械手的轨迹快速跟踪控制一直是控制领域中富有挑战性的课题之一 基于局部线性化理论的传统°?和° ?控制器仅能使得系统在一个很小的工作空间内获得较好的跟踪性能 基于非线性全局线性化理论而提出的计算力矩法由于可以使闭环系统获得完全的解耦和线性化 从而能在整个工作空间中获得良好的跟踪特性 但是计算力矩法所需的模型参数完全准确以及不存在测量误差等条件在工程实际中较难得到满足 为此 一些学者又先后提出了自适应控制等方案 本文利用神经网络Α阶逆系统线性化解耦能力≈ 将严重耦合的多自由度机械手解耦成多个二阶积分子系统 进一步采用线性系统设计方法对已解耦系统设计闭环控制器 成功地实现了位置快速跟踪 2多变量系统的神经网络Α阶逆系统解耦控制方法 ΔεχουπλινγχοντρολμετηοδοφΜΙΜΟσψστεμβασεδονΑΝΝΑτη?ορδεριν?ερσεσψστεμ 考察一个用输入输出微分方程表示的 ρ 个输入Υ ρ个输出Ψ 非线性系统Ε Φ Ψ Α Ψ2 Υ 其中 第 卷第 期 年 月机器人ΡΟΒΟΤ? ∏ Ξ基金项目 国家自然科学基金资助项目 收稿日期
多移动机器人编队控制
基于Multi-Agent的多机器人编队控制 摘要:多移动机器人协调是当前机器人技术的一个重要发展方向。多移动机器人之间的协调与 合作将大大提高机器人行为的智能化程度,完成由单个机器人难以完成的更加复杂的作业。多 移动机器人协调技术的研究对提高机器人的智能化水平及加快机器人的实用化进程具有重要的 理论研究意义和实用价值。本文结合多智能体技术对多机器人编队控制进行了研究,同时根据 具体的多机器人系统,进行了仿真实验。验证了多智能体技术在机器人编队控制系统中的应用,完成了小规模的编队控制。 关键词:多智能体;多机器人;编队控制;协调控制;模糊控制 Multi-robot Formation Control Based on Multi - Agent Abstract :The problem of multi-robot cooperation and coordination is central to mobile robotics. Cooperation and coordination will improve the intelligent performance of robots and can complete lots of impossible missions for single robot.The research on multi-robot cooperation and coordination is of great academic and applied significance. The multi-robot formation is developed combined with the multi-agent technology in this dissertation, and the simulation is done with the multi-robot system. The application of multi-agent is verified in the multi-robot formation control through a small system adopt the fomation control. Key words: Multi-agent ;Multi-robot ;Formation control;Coordination control;Fuzzy control 1. 国内外机器人系统发展现状 自80年代末以来,基于多智能体系统理论研究多机器人协作受到了普遍的关注,从军事领域到工业与民用领域,从星际探险到海底考察,从比赛到教学,都取得了不同程度的进步。近年来,在IEEE R&A,IROS等著名的国际机器人学术会议上,几乎每次会议都有多智能体协作机器人系统的专题。一些机器人学术刊物出版了有关多智能体机器人的研究专辑。一些研究项目,如ACTRESS,CEBOT,GOFER,SWARM等,已进行了多年[1]。 目前,国内关于群体机器人系统的研究刚刚起步,基本上还处于基础技术的研究阶段,这方面的研究成果报道比较少。中科院沈阳自动化所机器人开放研究实验室是国内研究多机器人技术较早也较全面的科研单位。 (1)CEBOT(Cellular Robotic System) CEBOT是一种自重构机器人系统(Self-Reconfigurable Robotic System),它的研究是受生物细胞结构的启发,将系统中众多的具有相同和不同功能的机器人视为细胞元,这些细胞元可以移动,寻找和组合。 根据任务或环境的变化,细胞元机器人可以自组织成器官化机器人,多个器官化机器人可以进一步自组织,形成更加复杂的机器人系统。细胞结构机器人系统强调是单元体的组合如何根据任务和环境的要求动态重构。因此,系统具有多变的构型,可以具有学习和适应的系统智能(Group Intelligence),并具有分布式的体系结构[3]。 (2)ALLANCE/L-ALLANCE系统
基于行为设计的自主式小型移动机器人系统研究详细摘要(正式)
基于行为设计的自主式小型机器鼠系统研究 学生:谢群指导老师:周伦 单位:机械工程学院机械工程与自动化2003级 摘要 移动机器人是近年来发展起来的一门综合学科,集中了机械、电子、计算机、自动控制以及人工智能等多学科最新研究成果,代表了机电一体化的最高成就。移动机器人在工业生产中常用来完成运输和上下料等任务,同时也被广泛用于农业、医疗等不同行业。 在移动机器人相关技术研究中,路径规划技术是一个重要研究领域[17]。本文首先初步讨论总结了目前主要的路径规划技术。从基于事例、基于环境模型和基于行为三个方面全面而系统地综述了移动机器人路径规划技术的研究现状,对于目前普遍采用的路径规划方法及其实际应用情况进行了较为详细介绍和分析。 基于行为的方法是由MIT的Brooks在他著名的包容式结构[42]中建立,它是一门从生物系统得到启发,而产生的用来设计自主机器人的技术,也是本文所重点研究的目标。它采用类似动物进化的自底向上的原理体系,尝试从简单的智能体来建立一个复杂的系统。将其用于解决移动机器人路径规划问题是一种新的发展趋势,它把导航问题分解为许多相对独立的行为单元,比如跟踪、避碰、目标制导等。这些行为单元是一些由传感器和执行器组成的完整的运动控制单元,具有相应的导航功能,各行为单元所采用的行为方式各不相同,这些单元通过相互协调工作来完成导航任务。 基于行为的机器人学反对抽象的定义, 因此采用具体化的解释更适合该领域的哲学思想。基于行为的机器人学的重要研究内容是系统结构而不是算法, 基于行为设计的机器人在非结构化动态环境中的性能非常优越,用基于符号的机器人学设计的类似机器人无法达到如下性能: a.高速度,高灵活性。在动态复杂环境中的移动速度很快; b.高鲁棒性。可以承受局部损坏; c.高效性。软件代码可以是传统的几百分之一,硬件可以是传统的几十分之一; d.经济性。价格是传统的十几分之一; e.可扩展性。很少改变原有系统便可增加性能; f.可靠性。分布式自组织并行工作,可靠性强。 为进一步研究基于行为的规划方法,而引入一个真实环境及任务模型,即IEEE每年举办的微型机器鼠比赛,通过设计基于行为的机器鼠模型论证该算法的可行性。此项比赛要求机器人能
移动机器人控制系统设计
? 197 ? ELECTRONICS WORLD?技术交流 移动机器人控制系统设计 广东工业大学 侯晓磊 随着移动机器人在人们社会生活中的地位不断提高,设计一种 可靠、稳定的机器人控制系统越发的变得重要起来,以NI公司的MyRIO控制器以其安全可靠、编程开发简单而脱颖而出。本文基于上述控制器、L298N电机驱动芯片Labview设计一种移动机器人控制软硬件系统系统,经验证,该系统运行稳定、可靠、高效。 1.前言 新一轮科技革命引发新一轮产业革命。“互联网+制造”构建工业4.0,智能制造成为我国由制造大国向制造强国转变的关键一步,移动机器人作为智能制造中的一个组成部分,作用越发的变得举足轻重。本文给出一种以MyRIO+L298N+Labivew的移动机器人控制系统。 2.IN MyRIO控制器 NI myRIO是NI最新设计的嵌入式系统设计平台。NI myRIO中内含双核ARM Cortex-A9,实时性高,并且还可以便捷定制FPGA I/ O,给开发设计人员提供更好的设计复杂系统的平台。 NI myRIO作为可重配置控制器具有以下重要特点: 易于上手使用:引导性安装和启动界面可使开发人员更快地熟悉操作,协助开发人员快速了解工程概念,完成设计任务。编程设计简单,利用实时应用、内置WiFi等功能,开发人员可以实现远程部署应用,“无线”操控。 板载资源众多:有丰富的数字I/O接口,提供SPI串行外设接口、PWM脉宽调制输出端口、正交编码器输入端口、UART异步收发器端口和I2C总线接口、多个单端模拟输入、差分模拟输入和带参考的模拟输入等可供选择的资源。 另外,NI MyRIO还提供可靠性能较好的控制器保护电路,防止由于意外操作造成控制器不可恢复性损坏,总之,NI MyRIO为开发人员提供了一个编程简易,设计电路方便,不用刻意担心意外操作而影响控制器使用的平台。 3.L298N电机控制芯片 L298N是一种用来驱动电机的集成电路,可以较稳定的输出平稳电流和较强的功率。工作均电流为2A,最高可达4A,最高输出电压为50V,能够带动带有感性元件的负载。控制器可以直接通过输入输出口与电机驱动芯片联接,从而方便控制驱动芯片的输出。如将芯片驱动直流电机时,可以直接与步进电机相联接,通过调节控制器输出实现步进电机的的正反转功能当控制直流电机时,可以通过调节控制芯片的电压信号的极性,PWM波的占空比,从而实现直流电机转速和转向的调节。4.系统硬件部分设计 系统采用MyRIO整体框架,外围增设电机驱动电路、避障驱动电路、里程计电路、液晶显示电路、陀螺仪电路。通过MyRIO主控制发送控制信号驱动移动机器人运动,实时通过外围传感器获取位置信息反馈给主控制 器,然后控制器通过闭环系统调节当前位置以保证对目标位置的追踪。 图1 5.系统软件部分设计 系统软件部分采用经典控制理论的闭环控制系统,将电机、主控制器和外设传感器构成闭环系统,通过调节闭环统的参数,来使 移动机器人以较小偏差追踪按照预定轨迹。 图2 6.结束语 本文介绍了基于NI MyRIO控制器设计移动机器人控制系统,通过仿真和实物测试,能较好的完成对任务的追踪踪。 参考:From Student to Engineer:Preparing Future Innova-tors With the NI LabVIEW RIO Architecture https://www.360docs.net/doc/f84038744.html,.2014-04-01;王曙光,袁立行,赵勇.机器人原理与设计.人民邮电出版社,2013 。
本科毕业论文-—基于向量场直方图的移动机器人避障方法研究
本科毕业设计(论文) 题目:(中文)基于向量场直方图的移动机器人避 障方法研究 (英文)STUDY OF OBSTACLE AVOIDANCE FOR THE MOBILE ROBOT BASED ON VECTOR FIELD HISTOGRAM
诚信承诺 我谨在此承诺:本人所写的毕业论文《基于向量场直方图的移动机器人避障方法研究》均系本人独立完成,没有抄袭行为,凡涉及其他作者的观点和材料,均作了注释,若有不实,后果由本人承担。 承诺人(签名): 年月日
基于向量场直方图的移动机器人避障方法研究 摘要 【摘要】移动机器人广泛应用于工业生产加工制造中,尤其在危险和恶劣的环境中可以用机器人代替人工操作减少损失。避障技术在移动机器人的发展中起着至关重要的作用,避障方法有很多种,本文是基于向量场直方图的移动机器人避障方法。由于传统的向量场直方图法在给定值太大或太小时都无法安全避障,本文在此基础上,利用激光测距仪所或得的数据首先确定一个可以安全行驶的范围,然后通过算法自动的改变给定值的大小,最终选择最优给定值,通过差分驱动控制使机器人安全避障。并在Robotic Studio仿真系统中建立场景和编程来实现。 【关键词】移动机器人;激光测距仪;向量场直方图;差分驱动;避障
STUDY OF OBSTACLE A VOIDANCE FOR THE MOBILE ROBOT BASED ON VECTOR FIELD HISTOGRAM Abstract 【ABSTRACT】Mobile robots are widely used in industrial production and manufacturing,especially in dangerous and harsh environments they can replace manual operations to reduce losses. Obstacle avoidance technology plays a vital role in the development of mobile robot , There are many ways about obstacle avoidance, this article is the obstacle avoidance method for mobile robot based on the vector field histogram.If the given value is too large or too small the robot can not go through obstacles safely using traditional vector field histogram method. Basing on the VFH, firstly ,determining a range of safe driving use the data from laser range finders.Then changing the given value automatically and choosing the optimal value , finally using the differential drive control method make the robot avoid obstacles successfully.And make it come ture in the Robotic Studio simulated system. 【KEYWORDS】mobile robot;LRF;VFH ; differential drive; obstacle avoidance
机器人神经网络控制
第一部分 机器人手臂的自适应神经网络控制 机器人是一具有高度非线性和不确定性的复杂系统,近年来各研究单位对机器人智能控制的研究非常热门,并已取得相当丰富的成果。 机器人轨迹跟踪控制系统的主要目的是通过给定各关节的驱动力矩,使得机器人的位置、速度等状态变量跟踪给定的理想轨迹。与一般的机械系统一样,当机器人的结构及其机械参数确定后,其动态特性将由动力学方程即数学模型来描述。因此,可采用经典控制理论的设计方法——基于数学模型的方法设计机器人控制器。但是在实际工程中,由于机器人模型的不确定性,使得研究工作者很难得到机器人精确的数学模型。 采用自适应神经网络,可实现对机器人动力学方程中未知部分的精确逼近,从而实现无需建模的控制。下面将讨论如何利用自适应神经网络和李雅普诺夫(Lyapunov )方法设计机器人手臂跟踪控制的问题。 1、控制对象描述: 选二关节机器人力臂系统(图1),其动力学模型为: 图1 二关节机器人力臂系统物理模型 ()()()()d ++++=M q q V q,q q G q F q ττ (1) 其中 1232 232232 22cos cos ()cos p p p q p p q p p q p +++??=? ?+??M q ,322 3122312 sin ()sin (,)sin 0p q q p q q q p q q --+?? =???? V q q
41512512cos cos()()cos()p g q p g q q p g q q ++??=??+?? G q ,()()0.02sgn =F q q ,()()0.2sin 0.2sin T d t t =????τ。 其中,q 为关节转动角度向量,()M q 为2乘2维正定惯性矩阵,(),V q q 为2乘2维向心哥氏力矩,()G q 为2维惯性矩阵,()F q 为2维摩擦力矩阵,d τ为 未知有界的外加干扰,τ为各个关节运动的转矩向量,即控制输入。 已知机器人动力学系统具有如下动力学特性: 特性1:惯量矩阵M(q)是对称正定阵且有界; 特性2:矩阵 () ,V q q 有界; 特性3:()()2,-M q C q q 是一个斜对称矩阵,即对任意向量ξ,有 ()()()2,0T -=ξ M q C q q ξ (2) 特性4:未知外加干扰d τ 满足 d d b ≤τ, d b 为正常数。 我们取[][]2 12345,,,, 2.9,0.76,0.87,3.04,0.87p p p p p kgm ==p ,两个关节的位置 指令分别为()10.1sin d q t =,()20.1cos d q t =,即设计控制器驱动两关节电 机使对应的手臂段角度分别跟踪这两个位置指令。 2、传统控制器的设计及分析: 定义跟踪误差为: ()()()d t t t =-e q q (3) 定义误差函数为: =+∧r e e (4) 其中0>∧=∧T 。 则 d =-++∧q r q e
基于神经网络的多任务学习机器人
基于神经网络的多任务学习机器人 目前绝大多数智能机器人具有较高的鲁棒性,但其基于具体行为的实现方法都需要程序员对相应的任务进行手工编程。然而,环境是复杂多样的,而要使得机器人能够在多种环境下进行任务,需要程序员将各种情况考虑在内,这样的系统对环境并不具有适应性,让机器人的应用受到了局限。基于此,提出的自主学习机器人以类人形机器人为基本模型,以神经网络为基础,通过人体对机器人进行示范,训练一个能识别人关节姿态的完备的神经网络。当机器人身处不同环境执行任务时,能够做出适应环境变化的动作。为此所设计的学习机器人系统的特色就在于使用神经网络具有学习能力,提高机器人对环境的适应能力,从而让任务执行更加灵活,使得机器人拥有更广阔的应用前景。 标签:自主学习;神经网络;姿態识别;机器人 doi:10.19311/https://www.360docs.net/doc/f84038744.html,ki.16723198.2017.01.092 1引言 1.1机器人在现代社会中的重要性 随着城乡居民消费结构的持续升级,以及智慧中国战略的不断推进,智能机器人在家庭、农业、工业等生活的方方面面都有着极其广泛的应用。随着社会的不断发展,社会分工越来越细,与此同时工作也变得越来越单调。另外,社会上有些工作风险较高,若让人去做,不仅效率不高,而且更会产生生命危险。在这样高风险的作业领域,对机器人的需求越来越高。在这一背景下,各种各样的机器人被研制了出来,用它们代替人来完成枯燥、单调、高风险的工作。这极大的提高了劳动生产率和生产质量,创造出了更多的社会财富。 同时,社会服务也对机器人产生了大量的需求。从公共服务方面来说,目前我国老龄人口已超过总人口的10%,人口老龄化问题已成为中国需要面临的重大课题。此外,我国残疾人口占总人口的比重也位居世界较高国家之列。机器人的运用,可以为他们提供大量的护理服务,提高他们的生活质量。在医疗服务方面机器人也有很大的优势,手术机器人凭借其操作的精度及可长期工作等特性广泛应用于手术操作中。总而言之,机器人已成为我们的社会不可取代的一部分。 1.2当前机器人领域的现状及弊端 目前机器人正处于快速发展的阶段,但目前市场上的机器人仍存在着许多弊端。传统机器人需要设计者针对具体的任务进行手工编程,为了使机器人在环境改变时也能完成任务,设计者就需要尽量将各种情况考虑在内。但是这样的机器人存在一些问题:一方面程序员无法穷尽所有的可能情况,另一方面环境的复杂性也无形中加大了机器人可能出故障的概率,这使得机器人缺乏良好的环境自适应能力,给机器人的广泛应用带来了很大的限制。
移动机器人的自主导航控制
移动机器人的自主导航控制 一、研究的背景 移动机器人是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。它集中了传感器技术、计算机技术、机械工程、电子工程、自动化控制工程以及人工智能等多学科的研究成果,是目前科学技术发展最活跃的领域之一。随着机器人性能不断地完善,移动机器人的应用范围大为扩展,不仅在工业、农业、国防、医疗、服务等行业中得到广泛的应用,而且在排雷、搜捕、救援、辐射和空间领域等有害与危险场合都得到很好的应用。因此,移动机器人技术已经得到世界各国的普遍关注。 在自主式移动机器人相关技术的研究中,导航技术是其研究核心,同时也是移动机器人实现智能化及完全自主的关键技术。导航是指移动机器人通过传感器感知环境信息和自身状态,实现在有障碍的环境中面向目标的自主运动。导航主要解决以下三方面的问题:(l)通过移动机器人的传感器系统获取环境信息;(2)用一定的算法对所获信息进行处理并构建环境地图;(3)根据地图实现移动机器人的路径规划及运动控制。 二、相关技术 移动机器人定位是指确定机器人在工作环境中相对于全局坐标的位置,是移动机器人导航的基本环节。定位方法根据机器人工作环境的复杂性、配备传感器种类和数量等方面的不同而采用多种方法。主要方法有惯性定位、标记定位、GPS定位、基于地图的定位等,它们都不同程度地适用于各种不同的环境,括室内和室外环境,结构化环境与非结构化环境。 惯性定位是在移动机器人的车轮上装有光电编码器,通过对车轮转动的记录来粗略地确定移动机器人位置。该方法虽然简单,但是由于车轮与地面存在打滑现象,生的累积误差随路径的增加而增大,导致定位误差的逐渐累积,从而引起更大的差。 标记定位法是在移动机器人工作的环境里人为地设置一些坐标已知的标记,超声波发射器、激光反射板等,通过机器人的传感器系统对标记的探测来确定机器人在全局地图中的位置坐标。三角测量法是标记定位中常用的方法,机器人在同一点探测到三个陆标,并通过三角几何运算,由此可确定机器人在工作环境中的坐标。标记定位是移动机器人定位中普遍采用的方法,其可获得较高的定位精度且计量小,但是在实际应用中需要对环境作一些改造,添加相应的标记,不太符合真正意义的自主导航。 GPS定位是利用环绕地球的24颗卫星,准确计算使用者所在位置的庞大卫星网 定位系统。GPS定位技术应用已经非常广泛,除了最初的军事领域外,在民用方面也得到了广泛的应用,但是因为在移动导航中,移动GPS接收机定位精度受到卫 星信号状况和道路环境的影响,同时还受到时钟误差、传播误差、接收机噪声