机械设计专业外文翻译--改进型智能机器人的语音识别方法
附件1:外文资料翻译译文
改进型智能机器人的语音识别方法
2、语音识别概述
最近,由于其重大的理论意义和实用价值,语音识别已经受到越来越多的关注。到现在为止,多数的语音识别是基于传统的线性系统理论,例如隐马尔可夫模型和动态时间规整技术。随着语音识别的深度研究,研究者发现,语音信号是一个复杂的非线性过程,如果语音识别研究想要获得突破,那么就必须引进非线性系统理论方法。最近,随着非线性系统理论的发展,如人工神经网络,混沌与分形,可能应用这些理论到语音识别中。因此,本文的研究是在神经网络和混沌与分形理论的基础上介绍了语音识别的过程。
语音识别可以划分为独立发声式和非独立发声式两种。非独立发声式是指发音模式是由单个人来进行训练,其对训练人命令的识别速度很快,但它对与其他人的指令识别速度很慢,或者不能识别。独立发声式是指其发音模式是由不同年龄,不同性别,不同地域的人来进行训练,它能识别一个群体的指令。一般地,由于用户不需要操作训练,独立发声式系统得到了更广泛的应用。所以,在独立发声式系统中,从语音信号中提取语音特征是语音识别系统的一个基本问题。
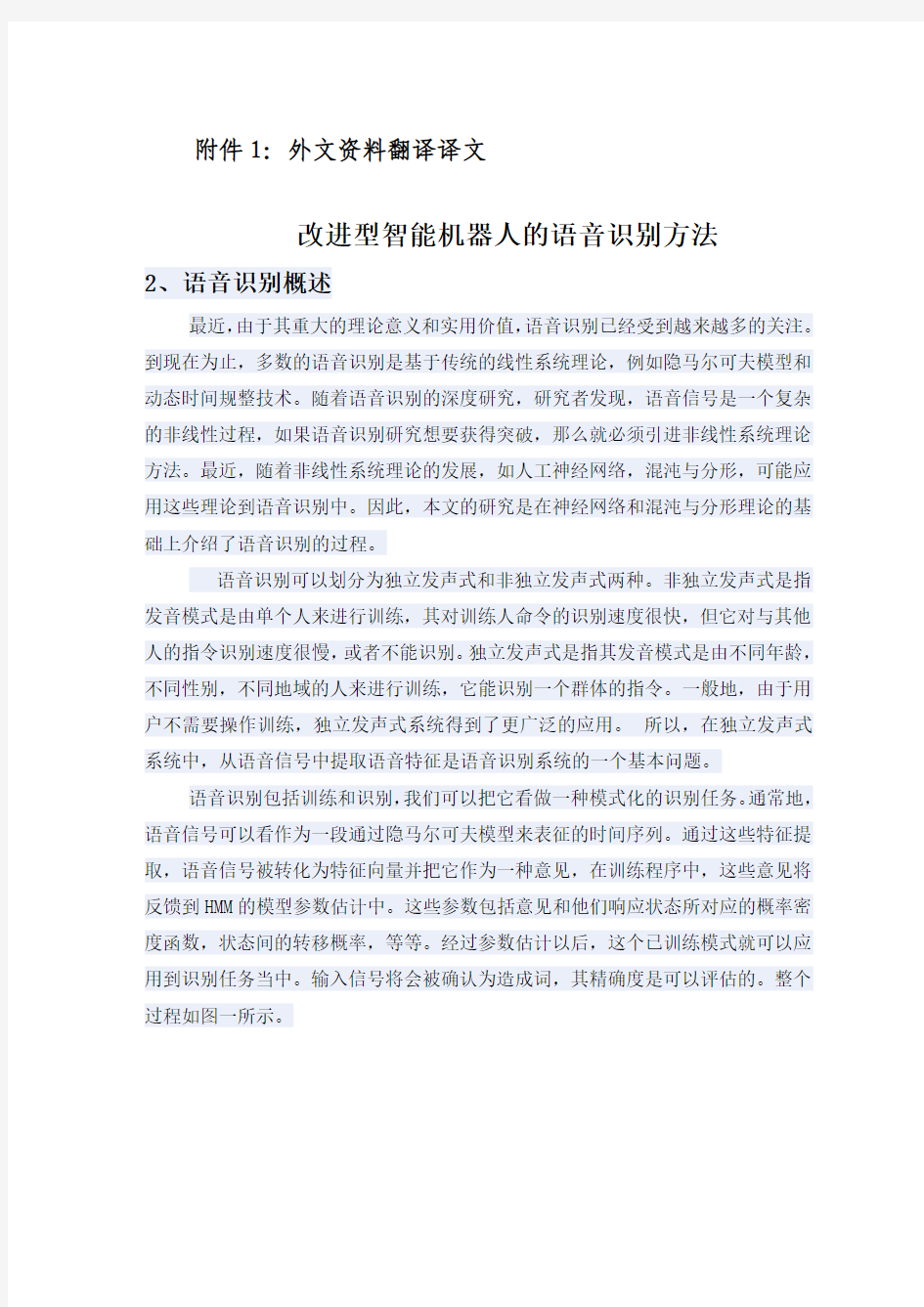
语音识别包括训练和识别,我们可以把它看做一种模式化的识别任务。通常地,语音信号可以看作为一段通过隐马尔可夫模型来表征的时间序列。通过这些特征提取,语音信号被转化为特征向量并把它作为一种意见,在训练程序中,这些意见将反馈到HMM的模型参数估计中。这些参数包括意见和他们响应状态所对应的概率密度函数,状态间的转移概率,等等。经过参数估计以后,这个已训练模式就可以应用到识别任务当中。输入信号将会被确认为造成词,其精确度是可以评估的。整个过程如图一所示。
图1 语音识别系统的模块图
3、理论与方法
从语音信号中进行独立扬声器的特征提取是语音识别系统中的一个基本问题。解决这个问题的最流行方法是应用线性预测倒谱系数和Mel频率倒谱系数。这两种方法都是基于一种假设的线形程序,该假设认为说话者所拥有的语音特性是由于声道共振造成的。这些信号特征构成了语音信号最基本的光谱结构。然而,在语音信号中,这些非线形信息不容易被当前的特征提取逻辑方法所提取,所以我们使用分型维数来测量非线形语音扰动。
本文利用传统的LPCC和非线性多尺度分形维数特征提取研究并实现语音识别系统。
3.1线性预测倒谱系数
线性预测系数是一个我们在做语音的线形预分析时得到的参数,它是关于毗邻语音样本间特征联系的参数。线形预分析正式基于以下几个概念建立起来的,即一个语音样本可以通过一些以前的样本的线形组合来快速地估计,根据真实语音样本在确切的分析框架(短时间内的)和预测样本之间的差别的最小平方原则,最后会确认出唯一的一组预测系数。
LPC可以用来估计语音信号的倒谱。在语音信号的短时倒谱分析中,这是一种特殊的处理方法。信道模型的系统函数可以通过如下的线形预分析来得到:
其中p代表线形预测命令,,(k=1,2,… …,p)代表预测参数,脉冲响应用
h(n)来表示,假设h(n)的倒谱是。那么(1)式可以扩展为(2)式:
将(1)带入(2),两边同时,(2)变成(3)。
就获得了方程(4):
那么可以通过来获得。
(5)中计算的倒谱系数叫做LPCC,n代表LPCC命令。
在我们采集LPCC参数以前,我们应该对语音信号进行预加重,帧处理,加工和终端窗口检测等,所以,中文命令字“前进”的端点检测如图2所示,接下来,断点检测后的中文命令字“前进”语音波形和LPCC的参数波形如图3所示。
图2 中文命令字“前进”的端点检测
图3 断点检测后的中文命令字“前进”语音波形和LPCC的参数波形
3.2 语音分形维数计算
分形维数是一个与分形的规模与数量相关的定值,也是对自我的结构相似性的测量。分形分维测量是[6-7]。从测量的角度来看,分形维数从整数扩展到了分数,打破了一般集拓扑学方面被整数分形维数的限制,分数大多是在欧几里得几何
尺寸的延伸。
有许多关于分形维数的定义,例如相似维度,豪斯多夫维度,信息维度,相关维度,容积维度,计盒维度等等,其中,豪斯多夫维度是最古老同时也是最重要的,它的定义如【3】所示:
其中,表示需要多少个单位来覆盖子集F.
端点检测后,中文命令词“向前”的语音波形和分形维数波形如图4所示。
图4 端点检测后,中文命令词“向前”的语音波形和分形维数波形
3.3 改进的特征提取方法
考虑到LPCC语音信号和分形维数在表达上各自的优点,我们把它们二者混合到信号的特取中,即分形维数表表征语音时间波形图的自相似性,周期性,随机性,同时,LPCC特性在高语音质量和高识别速度上做得很好。
由于人工神经网络的非线性,自适应性,强大的自学能力这些明显的优点,它的优良分类和输入输出响应能力都使它非常适合解决语音识别问题。
由于人工神经网络的输入码的数量是固定的,因此,现在是进行正规化的特征
参数输入到前神经网络[9],在我们的实验中,LPCC和每个样本的分形维数需要分别地通过时间规整化的网络,LPCC是一个4帧数据(LPCC1,LPCC2,LPCC3,LPCC4,每个参数都是14维的),分形维数被模范化为12维数据,(FD1,FD2,…FD12,每一个参数都是一维),以便于每个样本的特征向量有4*14+12*1=68-D维,该命令就是前56个维数是LPCC,剩下的12个维数是分形维数。因而,这样的一个特征向量可以表征语音信号的线形和非线性特征。
自动语音识别的结构和特征
自动语音识别是一项尖端技术,它允许一台计算机,甚至是一台手持掌上电脑(迈尔斯,2000)来识别那些需要朗读或者任何录音设备发音的词汇。自动语音识别技术的最终目的是让那些不论词汇量,背景噪音,说话者变音的人直白地说出的单词能够达到100%的准确率(CSLU,2002)。然而,大多数的自动语音识别工程师都承认这样一个现状,即对于一个大的语音词汇单位,当前的准确度水平仍然低于90%。举一个例子,Dragon's Naturally Speaking或者IBM公司,阐述了取决于口音,背景噪音,说话方式的基线识别的准确性仅仅为60%至80%(Ehsani & Knodt, 1998)。更多的能超越以上两个的昂贵的系统有Subarashii (Bernstein, et al., 1999), EduSpeak (Franco, etal., 2001), Phonepass (Hinks, 2001), ISLE Project (Menzel, et al., 2001) and RAD (CSLU, 2003)。语音识别的准确性将有望改善。
在自动语音识别产品中的几种语音识别方式中,隐马尔可夫模型(HMM)被认为是最主要的算法,并且被证明在处理大词汇语音时是最高效的(Ehsani & Knodt, 1998)。详细说明隐马尔可夫模型如何工作超出了本文的范围,但可以在任何关于语言处理的文章中找到。其中最好的是Jurafsky & Martin (2000) and Hosom, Cole, and Fanty (2003)。简而言之,隐马尔可夫模型计算输入接收信号和包含于一个拥有数以百计的本土音素录音的数据库的匹配可能性(Hinks, 2003, p. 5)。也就是说,一台基于隐马尔可夫模型的语音识别器可以计算输入一个发音的音素可以和一个基于概率论相应的模型达到的达到的接近度。高性能就意味着优良的发音,低性能就意味着劣质的发音(Larocca, et al., 1991)。
虽然语音识别已被普遍用于商业听写和获取特殊需要等目的,近年来,语言学习的市场占有率急剧增加(Aist, 1999; Eskenazi, 1999; Hinks, 2003)。早期的基于自动语音识别的软件程序采用基于模板的识别系统,其使用动态规划执行模式匹配或其他时间规范化技术(Dalby & Kewley-Port,1999). 这些程序包括Talk to Me (Auralog, 1995), the Tell Me More Series (Auralog, 2000), Triple-Play Plus (Mackey & Choi, 1998), New Dynamic English (DynEd, 1997), English Discoveries (Edusoft, 1998), and See it, Hear It, SAY IT! (CPI, 1997)。这些程序的大多数都不会提供任何反馈给超出简单说明的发音准确率,这个基于最接近模式匹配说明是由用户提出书面对话选择的。学习者不会被告之他们发音的准确率。特别是内里,(2002年)评论例如Talk to Me和Tell Me More等作品中的波形图,因为他们期待浮华的买家,而不会提供有意义的反馈给用户。Talk to Me 2002年的版本已经包含了更多Hinks (2003)的特性,比如,信任对于学习者来说是非常有用的:
★一个视觉信号可以让学习者把他们的语调同模型扬声器发出的语调进行对比。★学习者发音的准确度通常以数字7来度量(越高越好)
★那些发音失真的词语会被识别出来并被明显地标注。
附件2:外文原文(复印件)
Improved speech recognition method
for intelligent robot
2、Overview of speech recognition
Speech recognition has received more and more attention recently due to the important theoretical meaning and practical value [5 ]. Up to now, most speech recognition is based on conventional linear system theory, such as Hidden Markov Model (HMM) and Dynamic Time Warping(DTW) . With the deep study of speech recognition, it is found that speech signal is a complex nonlinear process. If the study of speech recognition wants to break through, nonlinear
-system theory method must be introduced to it. Recently, with the developmentof nonlinea-system theories such as artificial neural networks(ANN) , chaos and fractal, it is possible to apply these theories to speech recognition. Therefore, the study of this paper is based on ANN and chaos and fractal theories are introduced to process speech recognition.
Speech recognition is divided into two ways that are speaker dependent and speaker independent. Speaker dependent refers to the pronunciation model trained by a single person, the identification rate of the training person?sorders is high, while others’orders is in low identification rate or can’t be recognized. Speaker independent refers to the pronunciation model
trained by persons of different age, sex and region, it can identify a group of persons’orders. Generally,speaker independent system ismorewidely used, since the user is not required to conduct the training. So extraction of speaker independent features from the speech signal is the fundamental problem of speaker recognition system.
Speech recognition can be viewed as a pattern recognition task, which includes training and recognition.Generally, speech signal can be viewed as a time sequence and characterized by the powerful hidden Markov model (HMM). Through the feature extraction, the speech signal is transferred into feature vectors and act asobservations. In the training procedure, these observationswill feed to estimate the model parameters of HMM. These parameters include probability density function for the observations and their corresponding states, transition probability between the states, etc. After the parameter estimation, the trained models can be used for recognition task. The input observations will be recognized as the resulted words and the accuracy can be evaluated. Thewhole process is illustrated in Fig. 1.
Fig. 1Block diagram of speech recognition system
3 Theory andmethod
Extraction of speaker independent features from the speech signal is the fundamental problem of speaker recognition system. The standard methodology for solving this problem uses Linear Predictive Cepstral Coefficients (LPCC) and Mel-Frequency Cepstral Co-efficient (MFCC). Both these methods are linear procedures based on the assumption that speaker features have properties caused by the vocal tract resonances. These features form the basic spectral structure of the speech signal. However, the non-linear information in speech signals is not easily extracted by the present feature extraction methodologies. So we use fractal dimension to measure non2linear speech turbulence.
This paper investigates and implements speaker identification system using both traditional LPCC and non-linear multiscaled fractal dimension feature extraction.
3. 1L inear Predictive Cepstral Coefficients
Linear prediction coefficient (LPC) is a parameter setwhich is obtained when we do linear prediction analysis of speech. It is about some correlation characteristics between adjacent speech samples. Linear prediction analysis is based on the following basic concepts. That is, a speech sample can be estimated approximately by the linear combination of some past speech samples. According to the minimal square sum principle of difference between real speech sample in certain analysis frame
short-time and predictive sample, the only group ofprediction coefficients can be determined.
LPC coefficient can be used to estimate speech signal cepstrum. This is a special processing method in analysis of speech signal short-time cepstrum. System function of channelmodel is obtained by linear prediction analysis as follow.
Where p represents linear prediction order, ak,(k=1,2,…,p) represent sprediction coefficient, Impulse response is represented by h(n). Suppose
cepstrum of h(n) is represented by ,then (1) can be expanded as (2).
The cepstrum coefficient calculated in the way of (5) is called LPCC, n represents LPCC order.
When we extract LPCC parameter before, we should carry on speech signal pre-emphasis, framing processing, windowingprocessing and endpoints detection etc. , so the endpoint detection of Chinese command word“Forward”is shown in Fig.2, next, the speech waveform ofChinese command word“Forward”and LPCC parameter waveform after Endpoint detection is shown in Fig. 3.
3. 2 Speech Fractal Dimension Computation
Fractal dimension is a quantitative value from the scale relation on the meaning of fractal, and also a measuring on self-similarity of its structure. The fractal measuring is fractal dimension[6-7]. From the viewpoint of measuring, fractal dimension is extended from integer to fraction, breaking the limitof the general to pology set dimension being integer Fractal dimension,fraction mostly, is dimension extension in Euclidean geometry.
There are many definitions on fractal dimension, eg.,similar dimension, Hausdoff dimension, inforation dimension, correlation dimension, capability imension, box-counting dimension etc. , where,Hausdoff dimension is oldest and also most important, for any sets, it is defined as[3].
Where, M£(F) denotes how many unit £needed to cover subset F.
In thispaper, the Box-Counting dimension (DB) of ,F, is obtained by partitioning the plane with squares grids of side £, and the numberof squares that intersect the plane (N(£)) and is defined as[8].
The speech waveform of Chinese command word“Forward”and fractal dimension waveform after Endpoint detection is shown in Fig. 4. 3. 3Improved feature extractions method
Considering the respective advantages on expressing speech signal of LPCC and fractal dimension,we mix both to be the feature signal, that is, fractal dimension denotes the self2similarity, periodicity and randomness of speech time wave shape, meanwhile LPCC feature is good for speech quality and high on identification rate.
Due to ANN′s nonlinearity, self-adaptability, robust and self-learning such obvious advantages, its good classification and input2output reflection ability are suitable to resolve speech recognition problem.
Due to the number of ANN input nodes being fixed, therefore time regularization is carried out to the feature parameter before inputted to the neural network[9]. In our experiments, LPCC and fractal dimension of each
sample are need to get through the network of time regularization separately, LPCC is 4-frame data(LPCC1,LPCC2,LPCC3,LPCC4, each frame parameter is 14-D), fractal dimension is regularized to be12-frame data(FD1,FD2,…,FD12, each frame parameter is 1-D), so that the feature vector of each sample has 4*14+1*12=68-D, the order is, the first 56 dimensions are LPCC, the rest 12 dimensions are fractal dimensions. Thus, such mixed feature parameter can show speech linear and nonlinear characteristics as well.
Architectures and Features of ASR ASR is a cutting edge technology that allows a computer or even a hand-held PDA (Myers, 2000) to identify words that are read aloud or spoken into any sound-recording device. The ultimate purpose of ASR technology is to allow 100% accuracy with all words that are intelligibly spoken by any person regardless of vocabulary size, background noise, or speaker variables (CSLU, 2002). However, most ASR engineers admit that the current accuracy level for a large vocabulary unit of speech (e.g., the sentence) remains less than 90%. Dragon's Naturally Speaking or IBM's ViaV oice, for example, show a baseline recognition accuracy of only 60% to 80%, depending upon accent, background noise, type of utterance, etc. (Ehsani & Knodt, 1998). More expensive systems that are reported to outperform these two are Subarashii (Bernstein, et al., 1999), EduSpeak (Franco, et al., 2001), Phonepass (Hinks, 2001), ISLE Project (Menzel, et al., 2001) and RAD (CSLU, 2003). ASR accuracy is expected to improve. Among several types of speech recognizers used in ASR products, both implemented and proposed, the Hidden Markov Model (HMM) is one of the most dominant algorithms and has proven to be an effective method of dealing with large units of speech (Ehsani & Knodt, 1998). Detailed descriptions of how the HHM model works go beyond the scope of this paper and can be found in any text concerned with language processing; among the best are Jurafsky & Martin (2000) and Hosom, Cole, and Fanty
(2003). Put simply, HMM computes the probable match between the input it receives and phonemes contained in a database of hundreds of native speaker recordings (Hinks, 2003, p. 5). That is, a speech recognizer based on HMM computes how close the phonemes of a spoken input are to a corresponding model, based on probability theory. High likelihood represents good pronunciation; low likelihood represents poor pronunciation (Larocca, et al., 1991).
While ASR has been commonly used for such purposes as business dictation and special needs accessibility, its market presence for language learning has increased dramatically in recent years (Aist, 1999; Eskenazi, 1999; Hinks, 2003). Early ASR-based software programs adopted template-based recognition systems which perform pattern matching using dynamic programming or other time normalization techniques (Dalby & Kewley-Port, 1999). These programs include Talk to Me (Auralog, 1995), the Tell Me More Series (Auralog, 2000), Triple-Play Plus (Mackey & Choi, 1998), New Dynamic English (DynEd, 1997), English Discoveries (Edusoft, 1998), and See it, Hear It, SAY IT! (CPI, 1997). Most of these programs do not provide any feedback on pronunciation accuracy beyond simply indicating which written dialogue choice the user has made, based on the closest pattern match. Learners are not told the accuracy of their pronunciation. In particular, Neri, et al. (2002) criticizes the graphical wave forms presented in products such as Talk to Me and Tell Me More because
they look flashy to buyers, but do not give meaningful feedback to users. The 2000 version of Talk to Me has incorporated more of the features that Hinks (2003), for example, believes are useful to learners:
★A visual signal allows learners to compare their intonation to that of the model speaker.
★The learners' pronunciation accuracy is scored on a scale of seven (the higher the better).
Words whose pronunciation fails to be recognized are highlighted
外文翻译
Load and Ultimate Moment of Prestressed Concrete Action Under Overload-Cracking Load It has been shown that a variation in the external load acting on a prestressed beam results in a change in the location of the pressure line for beams in the elastic range.This is a fundamental principle of prestressed construction.In a normal prestressed beam,this shift in the location of the pressure line continues at a relatively uniform rate,as the external load is increased,to the point where cracks develop in the tension fiber.After the cracking load has been exceeded,the rate of movement in the pressure line decreases as additional load is applied,and a significant increase in the stress in the prestressing tendon and the resultant concrete force begins to take place.This change in the action of the internal moment continues until all movement of the pressure line ceases.The moment caused by loads that are applied thereafter is offset entirely by a corresponding and proportional change in the internal forces,just as in reinforced-concrete construction.This fact,that the load in the elastic range and the plastic range is carried by actions that are fundamentally different,is very significant and renders strength computations essential for all designs in order to ensure that adequate safety factors exist.This is true even though the stresses in the elastic range may conform to a recognized elastic design criterion. It should be noted that the load deflection curve is close to a straight line up to the cracking load and that the curve becomes progressively more curved as the load is increased above the cracking load.The curvature of the load-deflection curve for loads over the cracking load is due to the change in the basic internal resisting moment action that counteracts the applied loads,as described above,as well as to plastic strains that begin to take place in the steel and the concrete when stressed to high levels. In some structures it may be essential that the flexural members remain crack free even under significant overloads.This may be due to the structures’being exposed to exceptionally corrosive atmospheres during their useful life.In designing prestressed members to be used in special structures of this type,it may be necessary to compute the load that causes cracking of the tensile flange,in order to ensure that adequate safety against cracking is provided by the design.The computation of the moment that will cause cracking is also necessary to ensure compliance with some design criteria. Many tests have demonstrated that the load-deflection curves of prestressed beams are approximately linear up to and slightly in excess of the load that causes the first cracks in the tensile flange.(The linearity is a function of the rate at which the load is applied.)For this reason,normal elastic-design relationships can be used in computing the cracking load by simply determining the load that results in a net tensile stress in the tensile flange(prestress minus the effects of the applied loads)that is equal to the tensile strength of the concrete.It is customary to assume that the flexural tensile strength of the concrete is equal to the modulus of rupture of the
机械专业毕业论文外文翻译
附录一英文科技文献翻译 英文原文: Experimental investigation of laser surface textured parallel thrust bearings Performance enhancements by laser surface texturing (LST) of parallel-thrust bearings is experimentally investigated. Test results are compared with a theoretical model and good correlation is found over the relevant operating conditions. A compari- son of the performance of unidirectional and bi-directional partial-LST bearings with that of a baseline, untextured bearing is presented showing the bene?ts of LST in terms of increased clearance and reduced friction. KEY WORDS: ?uid ?lm bearings, slider bearings, surface texturing 1. Introduction The classical theory of hydrodynamic lubrication yields linear (Couette) velocity distribution with zero pressure gradients between smooth parallel surfaces under steady-state sliding. This results in an unstable hydrodynamic ?lm that would collapse under any external force acting normal to the surfaces. However, experience shows that stable lubricating ?lms can develop between parallel sliding surfaces, generally because of some mechanism that relaxes one or more of the assumptions of the classical theory. A stable ?uid ?lm with su?cient load-carrying capacity in parallel sliding surfaces can be obtained, for example, with macro or micro surface structure of di?erent types. These include waviness [1] and protruding microasperities [2–4]. A good literature review on the subject can be found in Ref. [5]. More recently, laser surface texturing (LST) [6–8], as well as inlet roughening by longitudinal or transverse grooves [9] were suggested to provide load capacity in parallel sliding. The inlet roughness concept of Tonder [9] is based on ??e?ective clearance‘‘ reduction in the sliding direction and in this respect it is identical to the par- tial-LST concept described in ref. [10] for generating hydrostatic e?ect in high-pressure mechanical seals. Very recently Wang et al. [11] demonstrated experimentally a doubling of the load-carrying capacity for the surface- texture design by reactive ion etching of SiC
机器人外文翻译
英文原文出自《Advanced Technology Libraries》2008年第5期 Robot Robot is a type of mechantronics equipment which synthesizes the last research achievement of engine and precision engine, micro-electronics and computer, automation control and drive, sensor and message dispose and artificial intelligence and so on. With the development of economic and the demand for automation control, robot technology is developed quickly and all types of the robots products are come into being. The practicality use of robot products not only solves the problems which are difficult to operate for human being, but also advances the industrial automation program. At present, the research and development of robot involves several kinds of technology and the robot system configuration is so complex that the cost at large is high which to a certain extent limit the robot abroad use. To development economic practicality and high reliability robot system will be value to robot social application and economy development. With the rapid progress with the control economy and expanding of the modern cities, the let of sewage is increasing quickly: With the development of modern technology and the enhancement of consciousness about environment reserve, more and more people realized the importance and urgent of sewage disposal. Active bacteria method is an effective technique for sewage disposal,The lacunaris plastic is an effective basement for active bacteria adhesion for sewage disposal. The abundance requirement for lacunaris plastic makes it is a consequent for the plastic producing with automation and high productivity. Therefore, it is very necessary to design a manipulator that can automatically fulfill the plastic holding. With the analysis of the problems in the design of the plastic holding manipulator and synthesizing the robot research and development condition in recent years, a economic scheme is concluded on the basis of the analysis of mechanical configuration, transform system, drive device and control system and guided by the idea of the characteristic and complex of mechanical configuration,
毕业设计外文翻译资料
外文出处: 《Exploiting Software How to Break Code》By Greg Hoglund, Gary McGraw Publisher : Addison Wesley Pub Date : February 17, 2004 ISBN : 0-201-78695-8 译文标题: JDBC接口技术 译文: JDBC是一种可用于执行SQL语句的JavaAPI(ApplicationProgrammingInterface应用程序设计接口)。它由一些Java语言编写的类和界面组成。JDBC为数据库应用开发人员、数据库前台工具开发人员提供了一种标准的应用程序设计接口,使开发人员可以用纯Java语言编写完整的数据库应用程序。 一、ODBC到JDBC的发展历程 说到JDBC,很容易让人联想到另一个十分熟悉的字眼“ODBC”。它们之间有没有联系呢?如果有,那么它们之间又是怎样的关系呢? ODBC是OpenDatabaseConnectivity的英文简写。它是一种用来在相关或不相关的数据库管理系统(DBMS)中存取数据的,用C语言实现的,标准应用程序数据接口。通过ODBCAPI,应用程序可以存取保存在多种不同数据库管理系统(DBMS)中的数据,而不论每个DBMS使用了何种数据存储格式和编程接口。 1.ODBC的结构模型 ODBC的结构包括四个主要部分:应用程序接口、驱动器管理器、数据库驱动器和数据源。应用程序接口:屏蔽不同的ODBC数据库驱动器之间函数调用的差别,为用户提供统一的SQL编程接口。 驱动器管理器:为应用程序装载数据库驱动器。 数据库驱动器:实现ODBC的函数调用,提供对特定数据源的SQL请求。如果需要,数据库驱动器将修改应用程序的请求,使得请求符合相关的DBMS所支持的文法。 数据源:由用户想要存取的数据以及与它相关的操作系统、DBMS和用于访问DBMS的网络平台组成。 虽然ODBC驱动器管理器的主要目的是加载数据库驱动器,以便ODBC函数调用,但是数据库驱动器本身也执行ODBC函数调用,并与数据库相互配合。因此当应用系统发出调用与数据源进行连接时,数据库驱动器能管理通信协议。当建立起与数据源的连接时,数据库驱动器便能处理应用系统向DBMS发出的请求,对分析或发自数据源的设计进行必要的翻译,并将结果返回给应用系统。 2.JDBC的诞生 自从Java语言于1995年5月正式公布以来,Java风靡全球。出现大量的用java语言编写的程序,其中也包括数据库应用程序。由于没有一个Java语言的API,编程人员不得不在Java程序中加入C语言的ODBC函数调用。这就使很多Java的优秀特性无法充分发挥,比如平台无关性、面向对象特性等。随着越来越多的编程人员对Java语言的日益喜爱,越来越多的公司在Java程序开发上投入的精力日益增加,对java语言接口的访问数据库的API 的要求越来越强烈。也由于ODBC的有其不足之处,比如它并不容易使用,没有面向对象的特性等等,SUN公司决定开发一Java语言为接口的数据库应用程序开发接口。在JDK1.x 版本中,JDBC只是一个可选部件,到了JDK1.1公布时,SQL类包(也就是JDBCAPI)
控制系统基础论文中英文资料外文翻译文献
控制系统基础论文中英文资料外文翻译文献 文献翻译 原文: Numerical Control One of the most fundamental concepts in the area of advanced manufacturing technologies is numerical control (NC).Prior to the advent of NC, all machine tools were manual operated and controlled. Among the many limitations associated with manual control machine tools, perhaps none is more prominent than the limitation of operator skills. With manual control, the quality of the product is directly related to and limited to the skills of the operator . Numerical control represents the first major step away from human control of machine tools. Numerical control means the control of machine tools and other manufacturing systems though the use of prerecorded, written symbolic instructions. Rather than operating a machine tool, an NC technician writes a program that issues operational instructions to the machine tool, For a machine tool to be numerically controlled , it must be interfaced with a device for accepting and decoding the p2ogrammed instructions, known as a reader. Numerical control was developed to overcome the limitation of human operator , and it has done so . Numerical control machines are more accurate than manually operated machines , they can produce parts more uniformly , they are faster, and the long-run tooling costs are lower . The development of NC led to the development of several other innovations in manufacturing technology: 1.Electrical discharge machining. https://www.360docs.net/doc/fb17623075.html,ser cutting. 3.Electron beam welding.
机械类毕业设计外文翻译
本科毕业论文(设计) 外文翻译 学院:机电工程学院 专业:机械工程及自动化 姓名:高峰 指导教师:李延胜 2011年05 月10日 教育部办公厅 Failure Analysis,Dimensional Determination And
Analysis,Applications Of Cams INTRODUCTION It is absolutely essential that a design engineer know how and why parts fail so that reliable machines that require minimum maintenance can be designed.Sometimes a failure can be serious,such as when a tire blows out on an automobile traveling at high speed.On the other hand,a failure may be no more than a nuisance.An example is the loosening of the radiator hose in an automobile cooling system.The consequence of this latter failure is usually the loss of some radiator coolant,a condition that is readily detected and corrected.The type of load a part absorbs is just as significant as the magnitude.Generally speaking,dynamic loads with direction reversals cause greater difficulty than static loads,and therefore,fatigue strength must be considered.Another concern is whether the material is ductile or brittle.For example,brittle materials are considered to be unacceptable where fatigue is involved. Many people mistakingly interpret the word failure to mean the actual breakage of a part.However,a design engineer must consider a broader understanding of what appreciable deformation occurs.A ductile material,however will deform a large amount prior to rupture.Excessive deformation,without fracture,may cause a machine to fail because the deformed part interferes with a moving second part.Therefore,a part fails(even if it has not physically broken)whenever it no longer fulfills its required function.Sometimes failure may be due to abnormal friction or vibration between two mating parts.Failure also may be due to a phenomenon called creep,which is the plastic flow of a material under load at elevated temperatures.In addition,the actual shape of a part may be responsible for failure.For example,stress concentrations due to sudden changes in contour must be taken into account.Evaluation of stress considerations is especially important when there are dynamic loads with direction reversals and the material is not very ductile. In general,the design engineer must consider all possible modes of failure,which include the following. ——Stress ——Deformation ——Wear ——Corrosion ——Vibration ——Environmental damage ——Loosening of fastening devices
机器人结构论文中英文对照资料外文翻译文献
中英文对照资料外文翻译文献 FEM Optimization for Robot Structure Abstract In optimal design for robot structures, design models need to he modified and computed repeatedly. Because modifying usually can not automatically be run, it consumes a lot of time. This paper gives a method that uses APDL language of ANSYS 5.5 software to generate an optimal control program, which mike optimal procedure run automatically and optimal efficiency be improved. 1)Introduction Industrial robot is a kind of machine, which is controlled by computers. Because efficiency and maneuverability are higher than traditional machines, industrial robot is used extensively in industry. For the sake of efficiency and maneuverability, reducing mass and increasing stiffness is more important than traditional machines, in structure design of industrial robot. A lot of methods are used in optimization design of structure. Finite element method is a much effective method. In general, modeling and modifying are manual, which is feasible when model is simple. When model is complicated, optimization time is longer. In the longer optimization time, calculation time is usually very little, a majority of time is used for modeling and modifying. It is key of improving efficiency of structure optimization how to reduce modeling and modifying time. APDL language is an interactive development tool, which is based on ANSYS and is offered to program users. APDL language has typical function of some large computer languages. For example, parameter definition similar to constant and variable definition, branch and loop control, and macro call similar to function and subroutine call, etc. Besides these, it possesses powerful capability of mathematical calculation. The capability of mathematical calculation includes arithmetic calculation, comparison, rounding, and trigonometric function, exponential function and hyperbola function of standard FORTRAN language, etc. By means of APDL language, the data can be read and then calculated, which is in database of ANSYS program, and running process of ANSYS program can be controlled.
毕业设计外文翻译附原文
外文翻译 专业机械设计制造及其自动化学生姓名刘链柱 班级机制111 学号1110101102 指导教师葛友华
外文资料名称: Design and performance evaluation of vacuum cleaners using cyclone technology 外文资料出处:Korean J. Chem. Eng., 23(6), (用外文写) 925-930 (2006) 附件: 1.外文资料翻译译文 2.外文原文
应用旋风技术真空吸尘器的设计和性能介绍 吉尔泰金,洪城铱昌,宰瑾李, 刘链柱译 摘要:旋风型分离器技术用于真空吸尘器 - 轴向进流旋风和切向进气道流旋风有效地收集粉尘和降低压力降已被实验研究。优化设计等因素作为集尘效率,压降,并切成尺寸被粒度对应于分级收集的50%的效率进行了研究。颗粒切成大小降低入口面积,体直径,减小涡取景器直径的旋风。切向入口的双流量气旋具有良好的性能考虑的350毫米汞柱的低压降和为1.5μm的质量中位直径在1米3的流量的截止尺寸。一使用切向入口的双流量旋风吸尘器示出了势是一种有效的方法,用于收集在家庭中产生的粉尘。 摘要及关键词:吸尘器; 粉尘; 旋风分离器 引言 我们这个时代的很大一部分都花在了房子,工作场所,或其他建筑,因此,室内空间应该是既舒适情绪和卫生。但室内空气中含有超过室外空气因气密性的二次污染物,毒物,食品气味。这是通过使用产生在建筑中的新材料和设备。真空吸尘器为代表的家电去除有害物质从地板到地毯所用的商用真空吸尘器房子由纸过滤,预过滤器和排气过滤器通过洁净的空气排放到大气中。虽然真空吸尘器是方便在使用中,吸入压力下降说唱空转成比例地清洗的时间,以及纸过滤器也应定期更换,由于压力下降,气味和细菌通过纸过滤器内的残留粉尘。 图1示出了大气气溶胶的粒度分布通常是双峰形,在粗颗粒(>2.0微米)模式为主要的外部来源,如风吹尘,海盐喷雾,火山,从工厂直接排放和车辆废气排放,以及那些在细颗粒模式包括燃烧或光化学反应。表1显示模式,典型的大气航空的直径和质量浓度溶胶被许多研究者测量。精细模式在0.18?0.36 在5.7到25微米尺寸范围微米尺寸范围。质量浓度为2?205微克,可直接在大气气溶胶和 3.85至36.3μg/m3柴油气溶胶。
基于单片机的步进电机控制系统设计外文翻译
毕业设计(论文)外文资料翻译 学院:机械工程学院 专业:机械设计制造及其自动化 姓名: 学号:XXXXXXXXXX 外文出处:《Computational Intelligence and (用外文写)Design》 附件: 1.外文资料翻译译文;2.外文原文。 注:请将该封面与附件装订成册。
附件1:外文资料翻译译文 基于微型计算机的步进电机控制系统设计 孟天星余兰兰 山东理工大学电子与电气工程学院 山东省淄博市 摘要 本文详细地介绍了一种以AT89C51为核心的步进电机控制系统。该系统设计包括硬件设计、软件设计和电路设计。电路设计模块包括键盘输入模块、LED显示模块、发光二极管状态显示和报警模块。按键可以输入设定步进电机的启停、转速、转向,改变转速、转向等的状态参数。通过键盘输入的状态参数来控制步进电机的步进位置和步进速度进而驱动负载执行预订的工作。运用显示电路来显示步进电机的输入数据和运行状态。AT89C51单片机通过指令系统和编译程序来执行软件部分。通过反馈检测模块,该系统可以很好地完成上述功能。 关键词:步进电机,AT89C51单片机,驱动器,速度控制 1概述 步进电机因为具有较高的精度而被广泛地应用于运动控制系统,例如机器人、打印机、软盘驱动机、绘图仪、机械式阀体等等。过去传统的步进电机控制电路和驱动电路设计方法通常都极为复杂,由成本很高而且实用性很差的电器元件组成。结合微型计算机技术和软件编程技术的设计方法成功地避免了设计大量复杂的电路,降低了使用元件的成本,使步进电机的应用更广泛更灵活。本文步进电机控制系统是基于AT89C51单片机进行设计的,它具有电路简单、结构紧凑的特点,能进行加减速,转向和角度控制。它仅仅需要修改控制程序就可以对各种不同型号的步进电机进行控制而不需要改变硬件电路,所以它具有很广泛的应用领域。 2设计方案 该系统以AT89C51单片机为核心来控制步进电机。电路设计包括键盘输入电路、LED显示电路、发光二极管显示电路和报警电路,系统原理框图如图1所示。 At89c51单片机的P2口输出控制步进电机速度的时钟脉冲信号和控制步进电机运转方向的高低电平。通过定时程序和延时程序可以控制步进电机的速度和在某一
引进外资外文翻译资料
河南科技学院新科学院 2013届本科毕业生论文(设计) 英文文献及翻译 Foreign capital inflows and welfare in an economy with imperfect competition 学生姓名:王艳杰 所在院系:经济系 所学专业:国际经济与贸易 导师姓名:侯黎杰 完成时间:2013年4月15日
Foreign capital inflows and welfare in an economy with imperfect competition Abstract:This paper examines the resource allocational and welfare effects of exogenous inflows of foreign capital in a general-equilibrium model with oligopolistic competition and unemployment. Although the welfare impact for the short run is ambiguous and dependent upon the strength of excess profits and scale economies relative to unemployment in manufacturing, in the long run additional inflows of foreign capital always improve national welfare with capital mobility. Hence, attracting foreign capital remains a sound policy for economies characterized by imperfect competition, scale economies,and regional unemployment. Keywords: International capital mobility; Imperfect competition; Welfare 1.Introduction The welfare effects of exogenous inflows of foreign capital in the presence of trade restrictions have been extensively studied. Brecher and Diaz Alejandro (1977) show that when imports are subject to tariffs, an introduction of fo reign capital inflows accentuates the tariff distortion and hence reduces national welfare if the import-competing sector is relatively capital-intensive. In contrast, Dei (1985) shows that when imports are restricted by quotas,foreign capital inflows in the presence of foreign-owned capital always improve welfare by depressing the rental and so lowering the payments to existing foreign-owned capital. Recently, Neary (1981), using a common framework for both tariffs and quotas, obtains more general results of foreign capital inflows; the welfare effect of such inflows depends crucially on whether foreign-owned capital exists initially in the home country. In addition, Khan (1982) and Grinols (1991) have examined the effects of foreign capital inflows for a generalized Harris-Todaro economy under tariff protection. Khan finds that the result by Brecher and Diaz Alejandro is still valid even in the presence of unemployment, whereas Grinols argues that increased foreign capital need not be detrimental to welfare if the opportunity costs of labor are sufficiently low. Noteworthy is that the models used by these authors are all based upon the premise of perfect competition along with constant returns-to-scale technology. Although perfect competition serves as a useful assumption in crystallizing theoretical insights, it nevertheless fails to depict many of the real-world phenomena. The real-world economy is characterized, to a large extent, by imperfect competition and economies of scale. The policy implications of imperfect competition and economies