验实验报告离散控制系统的性能分析及设计

实验报告
离散控制系统的性能分析及设计
一.实验目的:熟悉MATLAB环境下的离散控制系统性能分析;二.实验原理及实验内容
1. 数学模型的确定及系统分析:
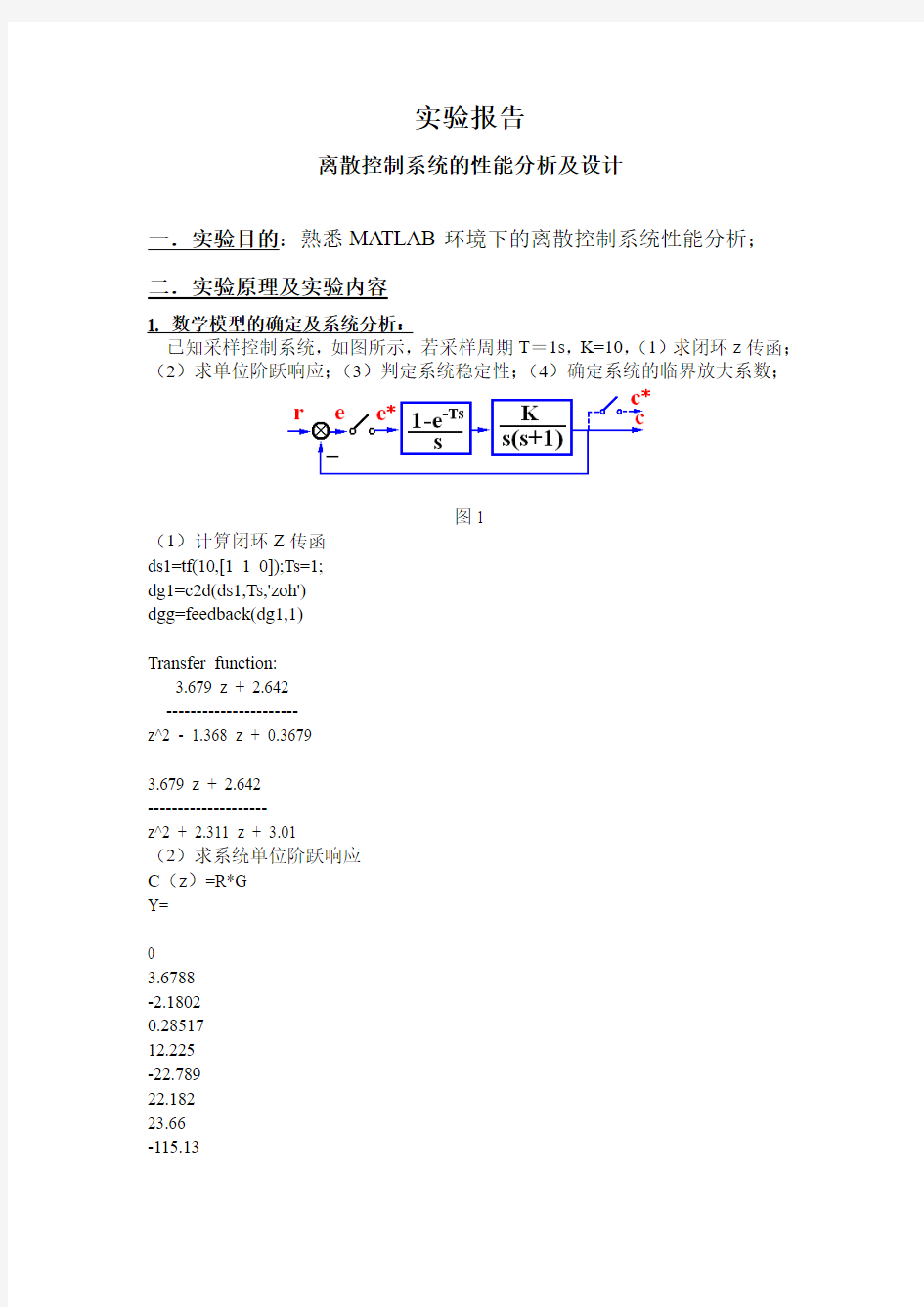
已知采样控制系统,如图所示,若采样周期T=1s,K=10,(1)求闭环z传函;(2)求单位阶跃响应;(3)判定系统稳定性;(4)确定系统的临界放大系数;
图1
(1)计算闭环Z传函
ds1=tf(10,[1 1 0]);Ts=1;
dg1=c2d(ds1,Ts,'zoh')
dgg=feedback(dg1,1)
Transfer function:
3.679 z + 2.642
----------------------
z^2 - 1.368 z + 0.3679
3.679 z + 2.642
--------------------
z^2 + 2.311 z + 3.01
(2)求系统单位阶跃响应
C(z)=R*G
Y=
3.6788
-2.1802
0.28517
12.225
-22.789
22.182
23.66
-115.13
201.15
-111.95
-1.1555 + 1.2943i -1.1555 - 1.2943i ans =
1.7350
1.7350
(4)临界稳定
将上述系统改变采样周期,T=0.1s,确定系统稳定的K 值范围;
Root Locus
Real Axis
I m a
g i n a r y A x i s
-6
-5-4-3
-2-101
-2-1.5
-1
-0.5
0.5
1
1.5
2
附录:
最小拍系统设计原理及实例:
图2
1)
最少拍系统的设计目标是:设被控对象)(0z G 无延迟且稳定,设计
)(z G D ,要求系统在典型输入作用下,经最少采样周期(有限拍)后输
出序列在各采样时刻的稳态误差为零,达到完全跟踪的目的。 2)
原理证明:
设)(0s G 的z 变换为)(0z G ,由图1可以求出系统的闭环脉冲传递函数 )
()(1)()()()
()(00z G z G z G z G z R z C z D D +=
=Φ (1) 以及误差脉冲传递函数
)
()(11
)()()(0z G z G z R z E z D e +=
=
Φ (2) 典型输入可表示为如下一般形式
m
z z A z R )1()()(1--=
其中,)(z A 是不含)1(1--z 因子的1-z 多项式。误差信号)(t e 的z 变换为
m
e e z z A z z R z z E )
1()
()()()()(1--Φ=
Φ= 根据z 变换的终值定理,离散系统的稳态误差为
若)(z e φ满足:
)()1()(1z F z z m e --=Φ()(z F 为不含)1(1--z 的因式)
则)(∞e =0,经常为使得控制器结构简单,1)(=z F
即
1()(1)m e z z -Φ=-
由式(1)(2)可知
)(1)(z z e φφ-=
)
()1()
()1(lim )(111z z z A z e e m z Φ--=∞--→
再根据(1)式,即可导出)(z G D
下表为各种典型输入作用下最少拍系统的设计结果。
表1
例 设单位反馈线性定常离散系统的连续部分和零阶保持器的传递函数分别为
)
1(10
)(+=
s s s G p
s
e s G sT
h --=1)(
其中采样周期s T 1=。若要求系统在单位斜坡输入时实现最少拍控制,试求数字控制器脉冲传递函数)(z G D 。
解 系统开环传递函数
02
10(1)
()()()(1)
sT p h e G s G s G s s s --==+ )368.01)(1()
717.01(68.3))(1()1()1()1(10)(1
11121
0---------+=??
????------=z z z z e z z z e z Tz z z G T T 根据t t r =)(,由表1查出最少拍系统应具有的闭环脉冲传递函数和误差脉冲传递函数为
)5.01(2)(11---=Φz z z
由式
可以确保系统在t t r =)(作用下成为最少拍系统。
根据)(0z G 求得
)
()1()
2()(02111z G z z z z G D -----=
)717.0)(1()5.0)(368.0(*543.0)
717.01)(1()5.01)(368.01(543.0)(1
111+---=+---=----z z z z z z z z z G D
用zemax设计光学显微镜光学系统设计实验报告
课 程 设 计 光学显微镜设计 设计题目 学 号 专业班级 指导教师 学生姓名 测量显微镜
根据学号得到自己设计内容的数据要求: 1.目镜放大率10(即焦距25) 2.目镜最后一面到物面距离110 3.对准精度1.2微米 按照实验步骤,先计算好外形尺寸。然后根据数据要求选取目镜与物镜。 我先做物镜。因为这个镜片比较少。按物镜放大率选好物镜后,将参数输入。简单优化,得到比较接近自己要求的物镜。 然后做目镜,同样的做法,这个按照焦距选目镜,将参数输入。将曲率半径设为可变量,调入默认的优化函数进行优化。发现“优化不了”,所有参数均没有变化。而且发现把光源放在“焦点”位置,目镜出射的不是平行光。我百思不得其解。开始认为镜头库的参数可能有问题。最后我问老师,老师解释,那个所谓的“焦点”其实不是焦点,我错误的把“焦点”到目镜第一个面的距离当成了焦距。这个目镜是有一定厚度的,不能简单等效成薄透镜。焦点到节点的距离才是焦距。经过老师指点后,我尝试调节光源到目镜第一面的距离,想得到出射平行光,从而找到焦点。但这个寻找是很费力气的,事倍功半。老师建议我把目镜的参数倒着顺序输入参数。然后用平行光入射,然后可以轻松找到焦点。 但是,按照这个方法,倒着输入参数,把光源放在无限
远的地方(平行光入射),发现光线是发散的。不解。还是按照原来的方法。把光源放在目镜焦点上,尽量使之出射平行光。然后把它与优化好的物镜拼接起来。后来,加入理想透镜(会聚平行光线),加以优化。 还有一个问题,就是选物镜的时候,发现放大倍率符合了自己的需求,但工作距离与共轭距,不符合自己的要求。这个问题在课堂上问过老师,后来经老师指点,通过总体缩放解决。 物镜参数及优化函数
控制系统设计及分析
控制系统设计及分析 一、SISO 控制系统的模型 1、环节串联 G(s)=G1(s)*G2(s)*…*Gn(s) sys=sys1*sys2*…*sysn 或: sys=series(sys1,sys2); sys==series(sys,sys3); …; sys=series(sys,sysn) 或: [num,den]= series(num1,den1,num2,den2); [num,den]= series(num,den,num3,den3); …; [num,den]= series(num,den,numn,denn); sys=tf(num,den) Ex311.m :求三个控制环节串联后的传递函数: 3 25 6: 3)1(32: 2) 1(1: 12 2+++++++s s sys s s sys s s s s sys %sys1的传递函数 num1=[1,1]; den1=conv([1,0],[1,1,1]); sys1=tf(num1,den1);
%sys2的传递函数 num2=[2,3]; den2=conv([1,1],[1,1]); sys2=tf(num2,den2); %sys3的传递函数 num3=[6,5]; den3=[2,3]; sys3=tf(num3,den3); %系统串联总的传递函数 sys=sys1*sys2*sys3 2、环节并联 G(s)=G1(s)+G2(s)+…+Gn(s) sys=sys1+sys2+…+sysn 或: sys=parallel(sys1,sys2);sys=parallel (sys,sys3);…; sys= parallel (sys,sysn) 或: [num,den]= parallel (num1,den1,num2,den2); [num,den]= parallel (num,den,num2,den2); …; [num,den]= parallel (num,den,numn,denn);
自动控制系统课程设计说明书
H a r b i n I n s t i t u t e o f T e c h n o l o g y 课程设计说明书(论文) 课程名称:自动控制理论课程设计 设计题目:直线一级倒立摆控制器设计 院系:电气学院电气工程系 班级: 设计者: 学号: 指导教师: 设计时间:2016.6.6-2016.6.19 手机: 工业大学教务处
*注:此任务书由课程设计指导教师填写。
直线一级倒立摆控制器设计 摘要:采用牛顿—欧拉方法建立了直线一级倒立摆系统的数学模型。采用MATLAB 分析了系统开环时倒立摆的不稳定性,运用根轨迹法设计了控制器,增加了系统的零极点以保证系统稳定。采用固高科技所提供的控制器程序在MATLAB中进行仿真分析,将电脑与倒立摆连接进行实时控制。在MATLAB中分析了系统的动态响应与稳态指标,检验了自动控制理论的正确性和实用性。 0.引言 摆是进行控制理论研究的典型实验平台,可以分为倒立摆和顺摆。许多抽象的控制理论概念如系统稳定性、可控性和系统抗干扰能力等,都可以通过倒立摆系统实验直观的表现出来,通过倒立摆系统实验来验证我们所学的控制理论和算法,非常的直观、简便,在轻松的实验中对所学课程加深了理解。由于倒立摆系统本身所具有的高阶次、不稳定、多变量、非线性和强耦合特性,许多现代控制理论的研究人员一直将它视为典型的研究对象,不断从中发掘出新的控制策略和控制方法。 本次课程设计中以一阶倒立摆为被控对象,了解了用古典控制理论设计控制器(如PID控制器)的设计方法和用现代控制理论设计控制器(极点配置)的设计方法,掌握MATLAB仿真软件的使用方法及控制系统的调试方法。 1.系统建模 一级倒立摆系统结构示意图和系统框图如下。其基本的工作过程是光电码盘1采集伺服小车的速度、位移信号并反馈给伺服和运动控制卡,光电码盘2采集摆杆的角度、角速度信号并反馈给运动控制卡,计算机从运动控制卡中读取实时数据,确定控制决策(小车运动方向、移动速度、加速度等),并由运动控制卡来实现该控制决策,产生相应的控制量,使电机转动,通过皮带带动小车运动从而保持摆杆平衡。
离散数学实验报告
《离散数学》实验报告专业网络工程 班级 姓名 学号 授课教师 二 O 一六年十二月
目录 实验一联结词的运算 实验二根据矩阵的乘法求复合关系 实验三利用warshall算法求关系的传递闭包实验四图的可达矩阵实现
实验一联结词的运算 一.实验目的 通过上机实验操作,将命题连接词运算融入到C语言的程序编写中,一方面加强对命题连接词运算的理解,另一方面通过编程实现命题连接词运算,帮助学生复习与锻炼C语言知识,将理论知识与实际操作结合,让学生更加容易理解与记忆命题连接词运算。 二.实验原理 (1) 非运算, 符号:? ,当P=T时 ,?P为F, 当P=F时 ,?P为T 。 (2) 合取, 符号: ∧ , 当且仅当P与Q的真值同为真,命题P∧Q的真值才为真;否则,P∧Q的真值为假。 (3) 析取, 符号: ∨ , 当且仅当P与Q的真值同为假,命题P∨Q的真值才为假;否则,P∨Q的真值为真。 (4) 异或, 符号: ▽ , 当且仅当P与Q的真值不同时,命题P▽Q的真值才为真;否则,P▽Q的真值为真。 (5) 蕴涵, 符号: →, 当且仅当P为T,Q为F时,命题P→Q的真值才为假;否则,P→Q 的真值为真。 (6) 等价, 符号: ? , 当且仅当P,Q的真值不同时,命题P?Q的真值才为假;否 则,P→Q的真值为真。 三.实验内容 编写一个程序实现非运算、合取运算、析取运算、异或运算、蕴涵运算、等价运算。四.算法程序 #include
光电计数器实验报告
光电计数器实验报告 学生姓名李志 学号081244115 专业名称光信息科学与技术 指导教师易煦农 时间日期2011-10-19 摘要 21世纪是信息时代,是获取信息,处理信息,运用信息的时代。传感与检测技术的重要性在于它是获得信息并对信息进行必要处理 的基础技术,是获取信 息和处理加工信息的手段,无法获取信息则无法运用信息。 光电式传感器是将光信号转化为电信号的一种传感器。它的理论基础是光电效应。这类效应大致可分为三类。第一类是外光电效应,即在光照射下,能使电子逸出物体表面。利用这种效应所做成的器件有真空光电管、光电倍增管等。第二类是内光电效应,即在光线照射下,能使物质的电阻率改变。这类器件包括各类半导体光敏电阻。第三类是光生伏特效应,即在光线作用下,物体内产生电动势的现象,此电动势称为光生电动势。这类器件包括光电池、光电晶体管等。光电效应都是利用光电元件受光照后,电特性发生变化。敏感的光波长是在可见光附近,包括红外波长和紫外波长。数字式电子计数器有直观和计数精确的优点,目前已在各种行业中普遍使用。数字式电子计
数器有多种计数触发方式,它是由实际使用条件和环境决定的。有采用机械方式的接触式触发的,有采用电子传感器的非接触式触发的,光电式传感器是其中之一,它是一种非接触式电子传感器。采用光电传感器制作的光电式电子计数器。这种计数器在工厂的生产流水线上作产品统计,有着其他计数器不可取代的优点。 【关键词】光电效应光电传感器光电计数器 ABSTRACT The 21st century is the age of information, it is the access to information, treatment information, use of the information age. Sensing and detection technology is important because it is the access to information and the information necessary to deal with the underlying technology, is access to information and means of processing information, unable to get information you won't be able to use information. Photoelectric sensor is a light signal into an electric signal of the sensor. It is the theoretical basis of the photoelectric effect. These effects can be broadly divided into three categories. The first type is outside of the photoelectric effect, namely, in daylight, can make the tungsten surface. Use this effect caused by device with vacuum photocell, photomultiplier tubes, etc. The second category is the photoelectric effect, i.e., in the light, can make the electrical resistivity of the material change. Such devices include various types of photosensitive semiconductor. The third category is photo voltaic effect, in the light, the objects within the EMF EMF, this is called light-induced electromotive force. This class of
离散数学实验报告
离散数学实验报告(实验ABC) 专业班级 学生姓名 学生学号 指导老师 完成时间
目录 第一章实验概述..................................... 错误!未定义书签。 实验目的....................................... 错误!未定义书签。 实验内容....................................... 错误!未定义书签。 实验环境....................................... 错误!未定义书签。第二章实验原理和实现过程........................... 错误!未定义书签。 实验原理....................................... 错误!未定义书签。 建立图的邻接矩阵,判断图是否连通 ............ 错误!未定义书签。 计算任意两个结点间的距离 ................... 错误!未定义书签。 对不连通的图输出其各个连通支 ................ 错误!未定义书签。 实验过程(算法描述)........................... 错误!未定义书签。 程序整体思路 ............................... 错误!未定义书签。 具体算法流程 ................................ 错误!未定义书签。第三章实验数据及结果分析........................... 错误!未定义书签。 建立图的邻接矩阵并判断图是否连通的功能测试及结果分析错误!未定义书签。 输入无向图的边 .............................. 错误!未定义书签。 建立图的连接矩阵 ............................ 错误!未定义书签。 其他功能的功能测试和结果分析................... 错误!未定义书签。 计算节点间的距离 ............................ 错误!未定义书签。 判断图的连通性 .............................. 错误!未定义书签。 输出图的连通支 .............................. 错误!未定义书签。 退出系统 .................................... 错误!未定义书签。第四章实验收获和心得体会........................... 错误!未定义书签。
光机电一体化系统设计实验报告
学院实验报告 学院:专业:班级:成绩: 姓名:学号:组别:组员: 实验地点:实验日期:指导教师签名: 实验(2)项目名称:加速度传感器、速度传感器振动测量实验和悬臂梁固有频率测量实验 1.实验项目名称 加速度传感器、速度传感器振动测量实验和悬臂梁固有频率测量实验 2.实验目的和要求 (1)了解并掌握机械振动信号测量的基本方法 (2)掌握用瞬态激振方式,进行机械阻抗测试的仪器组合及使用方法,了解瞬态激振时的数据处理方法 (3)测出悬臂梁的固有频率 3.实验原理 (1)振动测量原理 机械在运动时,由于旋转件的不平衡、负载的不均匀、结构刚度的各向异性、间隙、润滑不良、支撑松动等因素,总是伴随着各种振动。 机械振动在大多数情况下是有害的,振动往往会降低机器性能,破坏其正常工作,缩短使用寿命,甚至造成事故。机械振动还伴随着同频率的噪声,恶化环境,危害健康。另一方面,振动也被利用来完成有益的工作,如运输、夯实、清洗、粉碎、脱水等。这时必须正确选择振动参数,充分发挥振动机械的性能。 在现代企业管理制度中,除了对各种机械设备提出低振动和低噪声要求外,还需随时对机器的运行状况进行监测、分析、诊断,对工作环境进行控制。为了提高机械结构的抗振性能,有必要进行机械结构的振动分析和振动设计。这些都离不开振动测试。 振动测试包括两种方式:一是测量机械或结构在工作状态下的振动,如振动位移、速度、加速度、频率和相位等,了解被测对象的振动状态,评定等级和寻找振源,对设备进行监测、分析、诊断和预测。二是对机械设备或结构施加某种激励,测量其受迫振
动,以便求得被测对象的振动力学参量或动态性能,如固有频率、阻尼、刚度、频率响应和模态等。 振动的幅值、频率和相位是振动的三个基本参数,称为振动三要素。 幅值:幅值是振动强度的标志,它可以用峰值、有效值、平均值等方法来表示。 频率:不同的频率成分反映系统内不同的振源,通过频谱分析可以确定主要频率成分及其幅值大小,从而寻找振源,采取响应的措施。 相位:振动信号的相位信息十分重要,如利用相位关系确定共振点、测量振型、旋转件动平衡、有源振动控制、降噪等。对于复杂振动的波形分析,各谐波的相位关系是不可缺少的。 在振动测量时,应合理选择测量参数,如振动位移是研究强度和变形的重要依据;振动加速度与作用力或载荷成正比,是研究动力强度和疲劳的重要依据;振动速度决定了噪声的高低,人对机械振动的敏感程度在很大频率范围内是由速度决定的。速度又与能量和功率有关,并决定动量的大小。 (2)YD-37加速度传感器简介 压电传感器的力学模型可简化为一个单自由度质量——弹簧系统。根据压电效应的原理,当晶体上受到振动作用力时后,将产生电荷量,该电荷量与作用力成正比,这就是压电传感器完成机电转换的工作原理。压电式加速度传感器在振动测试领域中应用广泛,可以测量各种环境中的振动量。YD-37加速度传感器与DRBS-12-A型简易电荷放大器的综合灵敏度约是6080mV/m.s-2。 (3)CD-21速度传感器简介 CD-21振动速度传感器的基本原理是基于一个惯性质量(线圈组件)和壳体,壳体中固定有磁铁,惯性质量用弹性元件悬挂在壳体上工作时,将传感器壳体固定在振动体上,这样当振动体振动时,在传感器工作频率范围内,线圈与磁铁相对运动,切割磁力线,在线圈内产生感应电压,该电压值正比于振动速度值,这就是振动速度传感器的工作原理。CD-21振动速度传感器的测量范围是10~1000Hz,灵敏度约是200mv/cm.s-2。 (4)悬臂梁试验台架由底座、悬臂梁、加速度传感器、激振捶等构成。悬臂梁结构总体尺寸为120*110*150mm(长*宽*高)。可进行悬臂梁固有频率和阻尼系数的测量。 实验时通过激振捶敲击悬臂梁,产生脉冲激振,通过安装在悬臂梁上的加速度传感器获取悬臂梁受瞬态激励后输出的振动信号波形(信号触发采样方式),经信号调理设备处理后,通过数据采集仪输入计算机中,从悬臂梁脉冲响应信号波形或信号功率谱就
实验五基于MATLAB工具箱的控制系统分析与设计.
实验五、基于MATLAB工具箱的控制系统分析与设计(2学时) (综合型实验) 一、实验目的 (1)掌握线性时不变系统的对象模型的构造及其相互转换; (2)掌握线性时不变系统浏览器——LTI Viewer使用方法; (3)掌握单变量系统设计工具——SISO Design Tool的使用方法; (4)掌握非线性系统的控制器优化设计和仿真; (5)自行设计一个PID控制系统并进行PID控制器的优化设计(选)。 二、实验设备 MATLAB6.1系统教学软件及计算机一台。 三、实验内容 1、将下述传递函数转换成tf对象。 2、将第6章的例6-16中非线性系统进行线性化处理后所得线性化状态空间模型的系数矩阵(A,B,C,D)的值转换成LTI对象,然后利用线性时不变系统浏览器—LTI Viewer对系统进行分析。 3、使用 LTI Viewer对以下滑艇系统的动力学方程进行非线性系统的线性分析 4、以下单位反馈系统。利用单变量系统设计工具SISO Design Tool。(1)对其进行分析,画出系统的根轨迹图以及系统波特图,并求解相位裕量。 (2)对以上系统进行串联校正装置,其传递函数如下。 对校正后进行分析,画出校正后系统的根轨迹图以及系统波特图,并求解相位裕量。 5、对以下系统。 要求系统单位阶跃响应的最大上升时间为10秒、最大调节时间为30秒、最大超调量为20%。利用非线性控制器设计模块集(Nonlinear Control Design Blockset),试求PID控制器的最佳整定参数Kp、Ki和Kd。假设,三阶线性对象模型的不确定参数:40< a1<50,2.5< a2<10。
PLC控制系统的设计说明书
课程设计(论文) 题目:抢答器PLC控制系统设计 学院:机电工程学院 专业班级:09级机械工程及自动化03班 指导教师:肖渊职称:副教授 学生姓名:王帅 学号: 40902010317
目录 第1章概述 (1) 1.1 PLC的发展 (1) 1.2 PLC的应用 (2) 第2章抢答器系统的总体设计 (3) 2.1 抢答器电气控制系统设计要求 (3) 2.2 抢答器系统组成 (3) 2.3抢答器的流程图 (4) 第3章硬件系统设计 (5) 3.1 硬件接线图 (5) 3.2 I/O端子分配表 (6) 3.3 七段显示管的设计 (6) 第4章软件系统的设计 (8) 4.1 程序指令 (8) 4.2 工作过程分析 (11) 第5章总结 (13) 参考文献 (14) 附录一 (14)
第1章概述 可编程控制器(PLC)是一种新型的通用自动化控制装置,它将传统的继电器控制技术、计算机技术和通讯技术融为一体,具有控制功能强,可靠性高,使用灵活方便,易于扩展等优点而应用越来越广泛。可编程控制器(Programmable Logic Controller)即PLC。现已广泛应用于工业控制的各个领域。他以微处理为核心,用编写的程序不仅可以进行逻辑控制,还可以定时,计数和算术运算等,并通过数字量和模拟量的输入/输出来控制机械设备或生产过程。美国电气制造商协会经过4年调查,与1980年将其正式命名为可编程控制器(Programmable Controller),简写为PC。后来由于PC这个名称常常被用来称呼个人电脑(Personal Computer),为了区别,现在也把可编程控制器称为PLC。 1.1 PLC的发展 20世纪70年代初出现了微处理器。人们很快将其引入可编程逻辑控制器,使可编程逻辑控制器增加了运算、数据传送及处理等功能,完成了真正具有计算机特征的工业控制装置。此时的可编程逻辑控制器为微机技术和继电器常规控制概念相结合的产物。个人计算机发展起来后,为了方便和反映可编程控制器的功能特点,可编程逻辑控制器定名为Programmable Logic Controller(PLC)。 20世纪70年代中末期,可编程逻辑控制器进入实用化发展阶段,计算机技术已全面引入可编程控制器中,使其功能发生了飞跃。更高的运算速度、超小型体积、更可靠的工业抗干扰设计、模拟量运算、PID功能及极高的性价比奠定了它在现代工业中的地位。 20世纪80年代初,可编程逻辑控制器在先进工业国家中已获得广泛应用。世界上生产可编程控制器的国家日益增多,产量日益上升。这标志着可编程控制器已步入成熟阶段。 20世纪80年代至90年代中期,是可编程逻辑控制器发展最快的时期,年增长率一直保持为30~40%。在这时期,PLC在处理模拟量能力、数字运算能力、人机接口能力和网络能力得到大幅度提高,可编程逻辑控制器逐渐进入过程控制领域,在某些应用上取代了在过程控制领域处于统治地位的DCS系统。 20世纪末期,可编程逻辑控制器的发展特点是更加适应于现代工业的需要。这个时期诞生了各种各样的特殊功能单元、生产了各种人机界面单元、通信单元,使应用可编程逻辑控制器的工业控制设备的配套更加容易。
光电检测技术实验设计
光电检测技术 实验报告 题目:光电报警系统的设计和制作学院:仪器科学与光电工程学院专业:测控技术与仪器 班级: 学生姓名: 指导老师:
实验三 光电报警系统的设计和制作 一、设计任务 红外报警器系统的原理框图如图1所示。由红外光源发出的红外辐射被红外探测器接收,红外辐射信号变为电信号,经信号放大和处理电路后送报警电路。系统分成发送和接收两部分,分开放置。当没有人和物体进入这两部分之间,红外辐射没有被阻挡时,报警处于不报警状态。一旦有人或物体进入这两部分之间。红外辐射被阻挡,报警器立即翻转到报警状态。 图1 红外报警器系统原理框图 二、设计方案 (1)发射端电路 用NE555组成振荡器来驱动发光管,NE555构成多谐振荡器原题图如图2所示。下面对照电路图简述其工作原理及参数选择。 图2 多谐振荡器 注:1地 GND 2触发 3输出 4复位 5控制电压 6门限(阈值) 7放电 8电源电压Vc 当3脚为高电平(略低于Vc 时),输出电压将通过R1对C1充电。A 点电压按指数规律上升,时间常数为R1C1。 当A 点电压上升到上限阙值电压(约2Vc/3时),定时器输出翻转成低电平
(略大于0V)。这时,A点电压将随C1放电而按指数规律下降。当A点下降到下限阙值电压(约Vc/3)时,定时器输出变成高电平,调整R2的阻值得到严格的方波输出。 用NE555组成振荡器来驱动发光管时,要注意发光管上串联一个限流电阻。使输出电流小于或等于发光管的最大正向电流 F I。若振荡器输出电压为Vo,则 限流电阻R取值为F F O I V V R - ≥ 。如果限流电阻低于上述公式所得值,或未加限流电阻,则会造成发光管和定时器烧毁。 D2 LED 图3 振荡发射电路原理图 (2)光电检测、比较报警电路 D4 LED R8 500 图4 光电检测放大器电路原理图比较报警电路的设计利用光敏二极管的反向特性,当接收到光信号时,光敏二极管导通良好,产生电压,放大器即可对信号处理;当没有接收到光信号时,光敏二极管截止,放大器的同相端电压几乎为0。利用1/2LF353构成的光放大器,如图所示。用1/2LF353构成一个比较放大器。放大器的正端加2V左右偏压,负端加信号电压。当光线未阻断时,从主放大器来的交流信号经二极管检波电路,再经低通滤波器后得到直流电压,使后面的放大器负载输入端电位大于(或等于)正输入端电位。
控制系统建模、分析、设计和仿真
北京理工大学珠海学院 《计算机仿真》课程设计说明书题目: 控制系统建模、分析、设计和仿真 学院:信息学院 专业班级:自动化四班 学号: 学生姓名: 指导教师: 2012年 6 月 9 日
北京理工大学珠海学院 课程设计任务书 2011 ~2012 学年第2学期 学生姓名:专业班级: 指导教师:范杰工作部门:信息学院 一、课程设计题目 《控制系统建模、分析、设计和仿真》 本课程设计共列出10个同等难度的设计题目,编号为:[0号题]、[1号题]、[2号题]、[3号题]、[4号题]、[5号题]、[6号题]、[7号题]、[8号题]、[9号题]。 学生必须选择与学号尾数相同的题目完成课程设计。例如,学号为09xxxxxxxx2的学生必须选做[2号题]。 二、课程设计内容 (一)《控制系统建模、分析、设计和仿真》课题设计内容 最少拍有波纹控制系统
[8号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用零阶保持器离散化,采样周期取0.02秒,分别设计一单位加速度信号输入时的最少拍有波纹 控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 (二)《控制系统建模、分析、设计和仿真》课题设计要求及评分标准【共100分】 1、求被控对象传递函数G(s)的MATLAB 描述。(2分) 2、求被控对象脉冲传递函数G(z)。(4分) 3、转换G(z)为零极点增益模型并按z-1形式排列。(2分) 4、确定误差脉冲传递函数Ge(z)形式,满足单位加速度信号输入时闭环稳态误差为零和实际闭环系统稳 定的要求。(6分) 5、确定闭环脉冲传递函数Gc(z)形式,满足控制器Dy(z)可实现、最少拍和实际闭环系统稳定的要求。 (8分) 6、根据4、5、列写方程组,求解Gc(z)和Ge(z)中的待定系数并最终求解Gc(z)和Ge(z) 。(12分) 7、求针对单位加速度信号输入的最少拍有波纹控制器Dy(z)并说明Dy(z)的可实现性。(3分) 8、用程序仿真方法分析加速度信号输入时闭环系统动态性能和稳态性能。(7分) 9、用图形仿真方法(Simulink)分析单位加速度信号输入时闭环系统动态性能和稳态性能。(8分) 10、确定误差脉冲传递函数Ge(z)形式,满足单位速度信号输入时闭环稳态误差为零和实际闭环系统稳 定的要求。(6分) 11、确定闭环脉冲传递函数Gc(z)形式,满足控制器Dw(z)可实现、无波纹、最少拍和实际闭环系统稳 定的要求。(8分) 12、根据10、11、列写方程组,求解Gc(z)和Ge(z)中的待定系数并最终求解Gc(z)和Ge(z) 。(12分) 13、求针对单位速度信号输入的最少拍无波纹控制器Dw(z)并说明Dw(z)的可实现性。(3分) 14、用程序仿真方法分析单位速度信号输入时闭环系统动态性能和稳态性能。(7分) 15、用图形仿真方法(Simulink)分析单位速度信号输入时闭环系统动态性能和稳态性能。(8分) 16、根据8、9、14、15、的分析,说明有波纹和无波纹的差别和物理意义。(4分) ) 7)(5)(2()6)(1(879)(2+++++= s s s s s s s G
课程设计说明书 温度控制系统的设计与实现
课程设计说明书 课程设计说明书题目:温度控制系统的设计与实现
摘要 温度控制系统是一种典型的过程控制系统,在工业生产中具有极其广泛的应用。温度控制系统的对象存在滞后,它对阶跃信号的响应会推迟一些时间,对自动控制产生不利的影响,因此对温度准确的测量和有效的控制是此类工业控制系统中的重要指标。温度是一个重要的物理量,也是工业生产过程中的主要工艺参数之一,物体的许多性质和特性都与温度有关,很多重要的过程只有在一定温度范围内才能有效的进行,因此,对温度的精确测量和可靠控制,在工业生产和科学研究中就具有很重要的意义。 本文阐述了过程控制系统的概念,介绍了一种温度控制系统建模与控制,以电热水壶为被控对象,通过实验的方法建立温度控制系统的数学模型,采用了PID算法进行系统的设计,达到了比较好的控制目的。 关键词:温度控制;建模;自动控制;过程控制;PID
Abstract In industrial production with extremely extensive application, temperature control system is a typical process control system.Temperature control system has the larger inertia. It is the response signal to step off some of time.And it produces the adverse effect to the temperature measurement. The control system is the important industrial control index. Temperature is an important parameters in the process of industrial production. Also it is one of the main parameters of objects, many properties and characteristics of temperature, many important process only under certain temperature range can efficiently work. Therefore, the precise measurement of temperature control, reliable industrial production and scientific research has very important significance. This paper discusses the concept of process control system and introduces a kind of temperature control system .The electric kettle is the controlled object, PID algorithm is used for system design,through experience method to get the model of temperature control system and we can get the controlied response well. Keywords:Temperature control; Mathematical modeling; Automatic control; Process control; PID
离散数学实验报告--四个实验!!!
《离散数学》 课程设计 学院计算机学院 学生姓名 学号 指导教师 评阅意见 提交日期 2011 年 11 月 25 日
引言 《离散数学》是现代数学的一个重要分支,也是计算机科学与技术,电子信息技术,生物技术等的核心基础课程。它是研究离散量(如整数、有理数、有限字母表等)的数学结构、性质及关系的学问。它一方面充分地描述了计算机科学离散性的特点,为学生进一步学习算法与数据结构、程序设计语言、操作系统、编译原理、电路设计、软件工程与方法学、数据库与信息检索系统、人工智能、网络、计算机图形学等专业课打好数学基础;另一方面,通过学习离散数学课程,学生在获得离散问题建模、离散数学理论、计算机求解方法和技术知识的同时,还可以培养和提高抽象思维能力和严密的逻辑推理能力,为今后爱念族皮及用计算机处理大量的日常事务和科研项目、从事计算机科学和应用打下坚实基础。特别是对于那些从事计算机科学与理论研究的高层次计算机人员来说,离散数学更是必不可少的基础理论工具。 实验一、编程判断一个二元关系的性质(是否具有自反性、反自反性、对称性、反对称性和传递性) 一、前言引语:二元关系是离散数学中重要的内容。因为事物之间总是可以 根据需要确定相应的关系。从数学的角度来看,这类联系就是某个集合中元素之间存在的关系。 二、数学原理:自反、对称、传递关系 设A和B都是已知的集合,R是A到B的一个确定的二元关系,那么集合R 就是A×B的一个合于R={(x,y)∈A×B|xRy}的子集合 设R是集合A上的二元关系: 自反关系:对任意的x∈A,都满足
红外光电计数器实验报告(DOC)
信息与电气工程学院 课程设计说明书(2015 /2016 学年第1 学期) 课程名称:小型数据设计 题目:红外线计数器 专业班级:计算机1401 学生姓名:何亚茹赵君王中昆 学号:140210122 140210107 140210121 指导教师:生龙 设计周数:二周 设计成绩: 2016年01月08日
目录 1 程序设计 (1) 2 课程设的主要内容 (1) 2.1设计的要求.............. . (1) 2.2创新方案及原理分析 (1) 2.3方案论证与选择 (2) 2.4软件的设计 (3) 3主要芯片设计 (4) 3.1介绍 (4) 3.2 51 单片机的特点 (5) 3.3数码管 (7) 4系统设计 (8) 4.1单片机最小设计系统 (8) 4.2红外线检测电路 (9) 4.3计数显示部分 (10) 4.4蜂鸣器报警电路 (10) 4.5按键控制电路 (11) 5 红外计数器程序设计 (11) 5.1主程序设计 (11) 5.2子程序设计 (13) 6总结 (15) 7参考文献 (16)
1、程设计目的 课利用AT89C51单片机来制作一个手动计数器。通过具体的项目设计包括确定控制任务、系统总体方案设计、硬件系统设计、控制程序的设计等,以便掌握单片机系统设计的总体思路和方法,掌握基于单片机控制的电子产品开发的技术方法,培养个人的创新意识和动手能力。 2、课程设计的主要内容 2.1设计的要求 1.利用AT89C51单片机来制作一个红外线计数器。有物体经过红外对管时计数一次。计数的范围是0~99, 计数满时,又从零开始计数。 2.整个系统有较强的抗干扰能力,具有报警能力。 3.将计数值准确显示出来。 2.2创新方案及原理分析 总体电路是由AT89C51单片机系统、红外光电管电路、蜂鸣器报警电路、数码管显示部分、复位电路部分组成,其结构如图2.1所示 图 2.1 整体方框图 红外传感器感受到外界信息时,产生高低电平,通过软件程序设置单片机内部寄存器,当传感器的高低脉冲被单片机接收到时,单片机产生中断,中断产生后进入中断服务程序,通过设置中断服务程序,进行计数。并通过P0 口将计数信息传送至数码管,数码管显示计数的个数。当电路断电后重新启动计数器时,系统自动复位(上电自动复位),以00开始重新计数。
进程控制系统设计说明书
中北大学 课程设计说明书 学院、系:软件学院 专业:软件工程 班级:13140A05 学生姓名:学号: 设计题目:基于Windows的线程控制与同步 起迄日期: 2015年12月28日~2016年1月8日指导教师: 日期: 2015年12月25日
一、设计目的 进程同步是处理机管理中一个重要的概念。本设计要求学生理解和掌握Windows中线程控制与同步机制的相关API函数的功能,能够利用这些函数进行编程。 二、任务概述 (1)实现生产者-消费者问题。 (2)实现读/写者问题。 (3)实现哲学家就餐问题。 三、总体设计 (1)生产者-消费者问题。是一个多线程同步问题的经典案例。该问题描述了两个共享固定大小缓冲区的线程——即所谓的“生产者”和“消费者”——在实际运行时会发生的问题。生产者的主要作用是生成一定量的数据放到缓冲区中,然后重复此过程。与此同时,消费者也在缓冲区消耗这些数据。该问题的关键就是要保证生产者不会在缓冲区满时加入数据,消费者也不会在缓冲区中空时消耗数据。 (2)读/写者问题。创建一个控制台程序,此程序包含n个线程。用这n个线程来表示n个读者或写者。每个线程按相应测试数据文件(后面有介绍)的要求进行读写操作。用信号量机制分别实现读者优先或写者优先的读者-写者问题。 (3)实现哲学家就餐问题。用来演示在并行计算中多线程同步(Synchronization)时产生的问题。在1971年,著名的计算机科学家艾兹格·迪科斯彻提出了一个同步问题,即假设有五台计算机都试图访问五份共享的磁带驱动器。稍后,这个问题被托尼·霍尔重新表述为哲学家就餐问题。这个问题可以用来解释死锁和资源耗尽。有服务生解法,资源分级解法,Chandy/Misra解法。 四、详细设计函数 (1)生产者-消费者问题 #include
离散数学实验报告()
《离散数学》实验报告 专业网络工程 班级 姓名 学号 授课教师 二 O 一六年十二月
目录 实验一联结词的运算 实验二根据矩阵的乘法求复合关系 实验三利用warshall算法求关系的传递闭包实验四图的可达矩阵实现
实验一联结词的运算 一.实验目的 通过上机实验操作,将命题连接词运算融入到C语言的程序编写中,一方面加强对命题连接词运算的理解,另一方面通过编程实现命题连接词运算,帮助学生复习和锻炼C语言知识,将理论知识与实际操作结合,让学生更加容易理解和记忆命题连接词运算。二.实验原理 (1) 非运算, 符号: ,当P=T时,P为F, 当P=F时,P为T 。 (2) 合取, 符号: ∧ , 当且仅当P和Q的真值同为真,命题P∧Q的真值才为真;否则,P∧Q的真值为假。 (3) 析取, 符号: ∨ , 当且仅当P和Q的真值同为假,命题P∨Q的真值才为假;否则,P∨Q的真值为真。 (4) 异或, 符号: ▽ , 当且仅当P和Q的真值不同时,命题P▽Q的真值才为真;否则,P▽Q的真值为真。 (5) 蕴涵, 符号: →, 当且仅当P为T,Q为F时,命题P→Q的真值才为假;否则,P→Q 的真值为真。 (6) 等价, 符号: ?, 当且仅当P,Q的真值不同时,命题P?Q的真值才为假;否则,P→Q的真值为真。 三.实验内容 编写一个程序实现非运算、合取运算、析取运算、异或运算、蕴涵运算、等价运算。四.算法程序 #include
-光电定向实验报告
光电定向实验 李康华 (哈尔滨工业大学威海校区光电科学系,威海264209) 摘要:采用四象限探测器作为光电定向实验,学习四象限探测器的工作原理和特性,同时掌握四象限探测器定向的工作方法。实验中,四象限探测器的四个限区验证了具有完全一样的光学特性,同时四象限的定向具有较良好的线性关系。 关键词:光电定向四象限探测器 1、引言 随着光电技术的发展,光电探测的应用也越来越广泛,其中光电定向作为光电子检测技术的重要组成部分,是指用光学系统来测定目标的方位,在实际应用中具有精度高、价格低、便于自动控制和操作方便的特点,因此在光电准直、光电自动跟踪、光电制导和光电测距等各个技术领域得到了广泛的应用。光电定向方式有扫描式、调制盘式和四象限式,前两种用于连续信号工作方式,后一种用于脉冲信号工作方式。,由于四象限光电探测器能够探测光斑中心在四象限工作平面的位置,因此在激光准直、激光通信、激光制导等领域得到了广泛的应用[1]. 本光电定向实验装置采用激光器作为光源,四象限探测器作为光电探测接收器,采用目前应用最广泛的一种光电定向方式现直观,快速定位跟踪目标方位。定向原理由两种方式完成:1、硬件模拟定向,通过模拟电路进行坐标运算,运算结果通过数字表头进行显示,从而显示出定向坐标;2、软件数字定向,通过AD 转换电路对四个象限的输出数据进行采集处理,经过单片机运算处理,将数据送至电脑,由上位机软件实时显示定向结果。 本实验系统是根据光学雷达和光学制导的原理而设计的,利用其光电系统可以直接、间接地测定目标的方向。采用650nm激光器做光源,用四象限探测器显示光源方向和强度。通过实验,可以掌握四象限光电探测器原理,并观测到红外可见光辐射到四象限探测器上的位置和强度变化。并利用实验仪进行设计性实验等内容,将光学定向应用到各领域中[2]。 2、实验原理 2.1、系统介绍 光电定向是指用光学系统来测定目标的方位,在实际应用中具有精度高、价格低、便于自动控制和操作方便的特点,因此在光电准直、光电自动跟踪、光电制导和光电测距等各个技术领域得到了广泛的应用。采用激光器作为光源,四象限探测器作为光电探测接收器,根据电子和差式原理,实现可以直观、快速观测定位跟踪目标方位的光电定向装置,是目前应用最广泛的一种光电定向方式。该