飞机飞行性能-稳定和操纵

2.4 飞机的飞行性能、稳定与操纵
2.4.1 机体坐标轴系
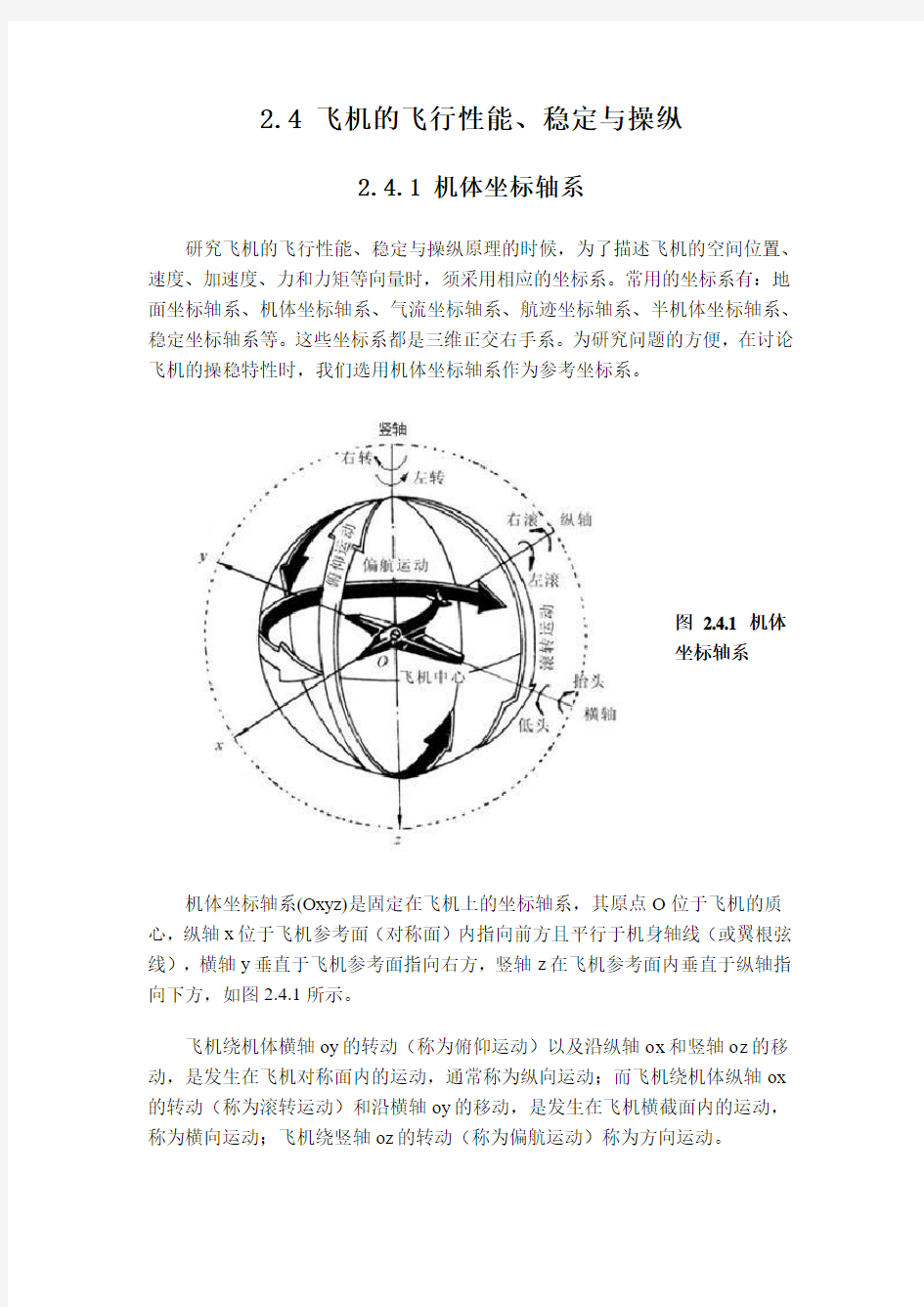
研究飞机的飞行性能、稳定与操纵原理的时候,为了描述飞机的空间位置、速度、加速度、力和力矩等向量时,须采用相应的坐标系。常用的坐标系有:地面坐标轴系、机体坐标轴系、气流坐标轴系、航迹坐标轴系、半机体坐标轴系、稳定坐标轴系等。这些坐标系都是三维正交右手系。为研究问题的方便,在讨论飞机的操稳特性时,我们选用机体坐标轴系作为参考坐标系。
图 2.4.1 机体
坐标轴系
机体坐标轴系(Oxyz)是固定在飞机上的坐标轴系,其原点O位于飞机的质心,纵轴x位于飞机参考面(对称面)内指向前方且平行于机身轴线(或翼根弦线),横轴y垂直于飞机参考面指向右方,竖轴z在飞机参考面内垂直于纵轴指向下方,如图2.4.1所示。
飞机绕机体横轴oy的转动(称为俯仰运动)以及沿纵轴ox和竖轴oz的移动,是发生在飞机对称面内的运动,通常称为纵向运动;而飞机绕机体纵轴ox 的转动(称为滚转运动)和沿横轴oy的移动,是发生在飞机横截面内的运动,称为横向运动;飞机绕竖轴oz的转动(称为偏航运动)称为方向运动。
2.4.2飞机的飞行性能和机动飞行
讨论飞机的飞行性能时,将飞机作为一个质点,其上所受到的力有:重力G、动力装置的推力T、升力L和阻力D,如图2.4.2所示。在等速直线飞行时,这些力是平衡的。图中为航迹速度与水平面的夹角,称为爬升角。当航迹速度
位于过原点的水平面之上时,为正。为发动安装角,为飞行迎角。发动安装角通常很小,近似认为=0。
飞机等速直线飞行的轨迹不外有3种情况:等速直线爬升(>0)、等速直线平飞(=0)和等速直线下滑(<0)。这3种典型等速直线运动的飞行性能分别称为爬升(或上升)性能、平飞性能和下滑性能。
图2.4.2 作用在飞机上的力图2.4.3 爬升率
飞机有各种飞行状态(如起飞/着陆、等速上升/下降、上升/下降转弯、巡航、机动飞行等),概括起来可将飞机的飞行性能分为类:(1) 等速直线飞行性能(基本飞行性能),(2) 续航性能,(3) 起飞着陆性能,(4) 机动飞行性能。下面分别予以简要介绍。
等速直线飞行性能
在等速直线飞行时,飞行迎角较小,近似认为=0。
水平等速直线飞行性能保持飞机等速直线平飞的条件是:动力装置提供的推力等于飞机的迎面阻力,飞机的升力等于飞机的重量。这其中认为发动机安装角及迎角α都很小。在图2.4.2中令=0,则有
(2.4.1)
衡量飞机水平等速直线飞行性能的主要指标有:最大平飞速度、最小平飞速度、巡航速度等。
最大平飞速度是指飞机在水平直线飞行条件下,把发动机推力加到最大所能达到的最大速度,以v max或Ma max表示。它是衡量飞机飞行性能的一项主要指标,代表飞机的“快飞”能力。
最大平飞速度一般由动力装置提供的推力等于飞机的阻力这一条件来决定。由于不同的高度有不同的空气密度(ρ),即阻力不同;而每种飞机所装发动机的高度特性(推力和耗油率随高度而变化的特性)不同,所以每架飞机的最大平飞速度与飞行高度有密切关系。一般喷气飞机的最大平平飞速度,都是在11000m以上的高空达到,因为此处空气稀薄,阻力小。
现代战斗机的高空最大平飞速度在Ma2.0~2.5之间,军民用运输机的高空最大平飞速度为Ma0.9左右。对于军用作战飞机来说,低空飞行能力具有重要意义,低空最大平飞速度也是衡量战斗机和攻击机的重要性能指标。一般高空最大平飞速度Ma2.0以上的飞机海平面最大平飞速度是Ma1.1(1349km/h)左右。
最小平飞速度,是指在一定高度上,飞机能做等速直线平飞的最小速度,以v min或Ma min表示。最小平飞速度一般由升力等于重力这一条件来决定。原则上讲,当C L=C Lmax时,飞机可获得最小平飞速度。但为了保证安全,常取安全或者允许升力系数(大致是C Lmax的70~90%)作为计算v min的依据。
巡航速度是指飞机飞行每千米耗油最少的速度。它主要取决于飞机的最大升阻比和所装发动机的高度特性和速度特性(推力和耗油率随高度和速度而变化的特性)。飞机以巡航速度飞行,其航程最远。民用飞机主要以巡航速度执行各种任务;超音速军用飞机的出航、返航等多数时间也都是以巡航速度飞行,即使在作战时刻,使用超音速飞行的时间也很短。现代民用喷气运输机的巡航速度在700~800km/h;军用飞机在900km/h左右。
等速直线爬升飞行性能,飞机的升限在图2.4.2中假设发动机安装角及迎角α都很小,可得等速直线爬升时力的平衡关系
飞机的稳定性
飞机的稳定性 飞机的稳定性是飞机设计中衡量飞行品质的重要参数,它表示飞机在受到扰动之后是否具有回到原始状态的能力。如果飞机受到扰动(例如突风)之后,在飞行员不进行任何操纵的情况下能够回到初始状态,则称飞机是稳定的,反之则称飞机是不稳定的。 飞机的稳定性包括纵向稳定性,反映飞机在俯仰方向的稳定特性;航向稳定性,反映飞机的方向稳定特性;以及横向稳定性,反映飞机的滚转稳定特性。 关于稳定与不稳定的概念可以形象的加以说明。例如,我们将一个小球放在波浪型表面的波峰上然后轻轻的推一下,小球就会离开波峰掉入波谷,我们将小球处在波峰位置的状态称为不稳定状态。反之,如果我们将小球放在波谷并且轻轻地推一下,球在荡漾一段时间之后,仍然能够回到谷底,我们称小球处在波谷的状态为稳定状态。 飞机的稳定与否对飞行安全尤为重要,如果飞机是稳定的,当遇到突风等扰动时,飞行员可以不用干预飞机,飞机会自动回到平衡状态;如果飞机是不稳定的,在遇到扰动时,哪怕是一丁点扰动,飞行员都必须对飞机进行操纵以保持平衡状态,否则飞机就会离初始状态越来越远。不稳定的飞机不仅极大地加重了飞行员的操纵负担,使飞行员随时随地处于紧张状态,而且飞行员对飞机的操纵与飞机自身运动的相互干扰还容易诱发飞机的振荡,造成飞行事故。从现代飞机设计理论来看,莱特兄弟发明的飞机是纵向不稳定的。然而他们却成功了,这主要是因为当时飞机的速度低,飞行员有足够的时间来调整飞机的平衡。莱特兄弟曾经说过他们在试飞时曾多次失控,飞机不住地振荡,最后以滑橇触地而结束。随着飞行速度越来越快,飞行员越来越难以控制不稳定的飞机,所以一般在飞机设计中要求将飞机设计成稳定的,飞机稳定性设计也变得越来越重要了。 虽然越稳定的飞机对于提高安全性越有利,但是对于操纵性来说却越来越不利。因为越稳定的飞机,要改变它的状态就越困难,也就是说,飞机的机动性越差。所以如何协调飞机的稳定性和操纵性之间的关系,对于现代战斗机来说是一个非常值得权衡的问题。实际上为了获得更大的机动性,目前最先进的战斗机都已经被设计成不稳定的飞机。当然这样的飞机不能再通过飞行员来保持平衡,而是通过一系列其他的增稳措施,比如电传操纵等主动控制手段来自动实现飞机的稳定性。
7第七章 飞机飞行操纵系统
第七章飞机飞行操纵系统 飞行操纵系统是用于供飞行员操纵飞机的副翼、升降舵、方向舵和其它可动舵面,从而实现飞机的横向、纵向、航向运动。 7.1简单机械操纵系统 7.1.1 飞行操纵系统的工作原理 飞行操纵系统通常包括主操纵系统和辅助操纵系统两部分。主操纵系统用来操纵方向舵、副翼、升降舵。辅助操纵系统用来操纵水平安定面、调整片等。 在主操纵系统中,飞行员手、脚直接操纵的部分,称为中央操纵机构(或称座舱操纵机构),它是由手操纵机构和脚操纵机构所组成。将操纵机构的动作传到舵面的部分,叫做传动机构(或称为传动装置)。传动机构是由传动杆、摇臂、钢索、滑轮等组成。 1、飞机的纵向操纵 飞机的纵向操纵是通过操纵驾驶杆或驾驶盘前、后运动控制升降舵来实现的。在飞行中向后拉杆,机头应向上仰;向前推杆,机头应下俯。 2、飞机的横向操纵 飞机的横向操纵系统是通过操纵驾驶杆或驾驶盘左、右运动或转动控制副翼来实现的,在飞行中,向左压杆或逆时针方向旋转驾驶盘,飞机应向左横滚;向右压杆或顺时针方向旋转驾驶盘,飞机应向右横滚。 3、飞机的航向操纵 飞机的航向操纵是通过脚蹬控制方向舵来实现的。在飞行中蹬右脚蹬,机头应向右偏转,蹬左脚蹬,机头应向左偏转。 7.1.2 中央操纵机构的构造和工作原理 飞机主操纵系统是由中央操纵机构和传动系统两大部分组成。中央操纵机构由手操纵机构和脚操纵机构所组成。 一、手操纵机构 手操纵机构一般分为驾驶杆式和驾驶盘式等两种。 图7-1表示一种驾驶杆式手操纵机构。 驾驶杆式手操纵机构虽然要操纵两个舵面——升降舵和副翼,但两者不会互相干扰。也就是说,单独操纵某一舵面时,另一舵面既不随之偏转,也不妨碍被操纵舵面的动作。 图7-2表示一种驾驶盘式手操纵机构。 二、脚操纵机构 脚操纵机构有脚蹬平放式和脚蹬立放式两种。
飞行控制系统简介
自动飞行控制系统 飞行控制系统(简称飞控系统)的作用是保证飞机的稳定性和操纵性,提高飞机飞行性能和完成任务的能力,增强飞行的安全性和减轻驾驶员的工作负担。 深圳市瑞伯达科技有限公司,致力于成为全球无人机飞行器领导品牌,是智能化无人机飞行器及控制系统的研制开发的专业厂商,生产并提供各行业无人机应用的解决方案。产品线涵盖各种尺寸多旋翼飞行器、专业航拍飞行器、无人机飞行控制系统、无人机地面站控制系统、高清远距离数字图像传输系统、专业级无线遥控器、高精飞行器控制模块及各类飞行器配件 飞行器的自动飞行一、问题的提出早在重于空气的飞行器问世时,就有了实现自动控制飞行的设想。1891年海诺姆.马克西姆设计和建造的飞行器上安装了用于改善飞行器纵向稳定性的飞行系统。该系统中用陀螺提供反馈信号,用伺服作动器偏转升降舵。这个设想在基本概念和手段上与现代飞行自动控制系统有惊人的相似,但由于飞机在试飞中失事而未能成为现实。 60年代飞机设计的新思想产生了,即在设计飞机的开始就考虑自动控制系统的作用。基于这种设计思想的飞机称为随控布局飞行器(Control Configured Vehicle 简称CCV)。这种飞机有更多的控制面,这些控制面协同偏转可完成一般飞机难以实现的飞行任务,达到较高的飞行性能。 飞控系统分类飞控系统分为人工飞行控制系统和自动飞行控制系统两大类。由驾驶员通过对驾驶杆和脚蹬的操纵实现控制任务的系统,称为人工飞行控制系统。最简单的人工飞行控制系统就是机械操纵系统。不依赖于驾驶员操纵驾驶杆和脚蹬指令而自动完成控制任务的飞控系统,称为自动飞行控制系统。自动驾驶仪是最基本的自动飞行控制系统。飞控系统构成飞控系统由控制与显示装置、传感器、飞控计算机、作动器、自测试装置、信息传输链及接口装置组成。控制及显示装置是驾驶员输入飞行控制指令和获取飞控系统状态信息的设备,包括驾驶杆、脚蹬、油门杆、控制面板、专用指示灯盘和电子显示器(多功能显示器、平视显示器等)。传感器为飞控系统提供飞机运动参数(航向角、姿态角、角速度、位置、速度、加速度等)、大气数据以及相关机载分系统(如起落架、机轮、液压源、电源、燃油系统等)状态的信息,用于控制、导引和模态转换。飞控计算机是飞控系统的“大脑”,用来完成控制逻辑判断、控制和导引计算、系统管理并输出控制指令和系统状态显示信息。作动器是飞控系统的执行机构,用来按飞控计算机指令驱动飞机的各种舵面、油门杆、喷管、机轮等,以产生控制飞机运动的力和力矩。自测试装置用于飞行前、飞行中、飞行后和地面维护时对系统进行自动监测,以确定系统工作是否正常并判断出现故障的位置。信息传输链用于系统各部件之间传输信息。常用的传输链有电缆、光缆和数据总线。接口装置用于飞控系统和其他机载系统之间的连接,不同的连接情况可以有多种不同的接口形式。 自动飞行控制系统由自动驾驶仪、自动油门杆系统、自动导航系统、自动进场系统和自动着陆系统、自动地形跟随/回避系统构成。 RIBOLD瑞伯达科技有限公司,致力于成为全球飞行影像系统独家先驱,其产品线涵盖无人机飞行控制系统及地面站控制系统、影视航拍飞行平台、商用云台系统、高清远距离数字图像传输系统、无线遥控和成像终端及模型飞行器产品,多旋翼飞行器和高精控制模块。 RBD瑞伯达坚持创新, 以技术和产品为核心,通过完美的产品带来前所未有的飞行体验。我们的目标是做世界一流的无人机企业,为我们的客户提供一流的产品和服务!
91108-飞行力学-第10章:飞机的横航向动稳定性和操纵性
第10章 飞机的横航向动稳定性和动操纵性 作业: 10.1 10.2 10.4 10.5
内容10.1 飞机横航向动稳定性10.1.2 典型的横航向运动模态10.1.3 滚转模态 10.1.4 螺旋模态 10.1.5 滚转--螺旋模态 10.1.6 荷兰滚模态 10.2 飞机横航向动操纵性10.2.1 副翼的操纵反应 10.2.2 方向舵的操纵反应 小结
由组成的四阶方程,对于正常布局的飞机,它由一个负的大实根、一对实部为负的共轭复根和一个小的实根(可正可负)组成。 10.1.2 典型的横航向运动模态 ,,,p r βφ滚转模态 荷兰滚模态 螺旋模态负的大实根负的共轭复根 小的实根
对应于特征方程中的一个大的负实根; 其特征是衰减很快的非周期运动,其振幅衰减一半的时间仅为零点几秒; 受横侧扰动后,飞机绕机体轴的单自由度滚转,收敛过程很快。运动变量是滚转角速度和滚转角; 飞机具有较大的横向阻尼(来源机翼),运动衰减快,一般均能满足品质要求。 1.滚转模态 ,p φlp C
飞机横航向运动中最重要的模态; 对应特征方程中的一对共轭复根,滚转角、侧滑角和偏航角的量级相同; 偏航运动略超前滚转,即左偏航时右滚转。飞机重心沿直线轨迹前进,颇似荷兰人的滑冰动作而得名; 模态频率高,周期约为数秒至十几秒,介于纵向长、短周期之间。品质规范对其特性有严格要求。 ,,βφψ荷兰?
3.螺旋模态 对应特征方程中的一个小实根; 特征是衰减缓慢的非周期运动,运动变量为偏航角和滚转角; 允许其特征根为一小的正根,由于运动不 稳定时呈螺旋状而得名; 运动缓慢,半幅或倍幅时间长,约上百秒,易于纠正,对其模态特性要求不高。 ,ψφ
飞机飞行操作系统
单选 1、飞行操纵系统中主操纵系统在飞行中得功用就是 A:用来操纵副翼、方向舵与升降舵得运动、A B:操纵飞机绕纵轴、立轴与横轴转动,以改变或保持飞机得飞行姿态、 C:操纵飞机沿纵轴、立轴与横轴运动,以改变或保持飞机得飞行姿态、 D:操纵飞机起飞、着陆与上升、下降、 回答:错误您得答案:正确答案:B 提示: 2、在飞行中,飞机需要向左改变航向时应 A :蹬左脚蹬:向右转驾驶盘、 B:向左转驾驶盘;蹬左脚蹬、 C:向左转驾驶盘;蹬右脚蹬、A D:蹬右脚蹬;向右转驾驶盘、 回答:错误您得答案:正确答案:B 提示: 3、飞行操作系统中得手操纵与脚操纵动作 A:与人体运动得本能反应相一致、 B :与人体运动得本能反应不一致、 C:与飞机运动相反、 D:手操纵动作与人体得本能反应一致,脚操纵与人体得本能反应不一致、 回答:错误您得答案:正确答案:A A提示: 4、操纵飞机升降舵就是为了使飞机 A:绕横轴转动、A B:使飞机作起飞、着陆运动、》C:沿飞机横轴方向运动、a D :绕纵轴作旋转运动、 回答:错误您得答案:正确答案:A 提示: 5、飞行员操纵飞机盘旋爬髙时,后带驾驶杆并左转驾驶盘,那么右边副翼及升降舵得运动就是 A:向卞偏与向下偏、A B:向上偏与向下偏、A C:向上偏与向上偏、 D:向下偏与向上偏、 回答:错误您得答案:正确答案:D 提示: 6、所谓飞行操作系统得主操纵力就是指 A:飞行员进行主操纵时施加在主操纵机构上得力、A B:飞行员进行主操纵时电传动机构操纵
摇臂施加在各主操纵而上得作用力、 C:飞行员进行主操纵时所要提供得最大操纵力、 D:飞行员进行主操纵使主操纵面偏转后操纵而产生得使飞机改变飞行姿态得空气动力、回答:错误您得答案:正确答案:A A提示: 7、根据操纵力得传递特点可将飞机主操纵型式分为 A:人工操纵与自动操纵、 B:无助力机械式主操纵与助力式主操纵、 C:液压式主操纵与电传式主操纵、“):机械式主操纵与液压式主操纵、回答:错误您得答案:正确答案:B上提示: 8、飞机操纵系统中可使软式传动得钢索改变方向得就是 A:松紧螺套、 B:双摇臂、 C:滑轮、述):导索环、 回答:错误您得答案:正确答案:B 提示: 9、在软式传动中得钢索必须要有一泄得预加张力,苴原因就是 A :防止气温变化使钢索松弛、 B:在操纵舵面时减小钢索受力、 C:防止钢索使用过程中变松、A D:克服“弹性间隙”,改善系统灵敏性、 回答:错误您得答案:正确答案:D A提示: 10、有液压助力器得飞行操纵系统中,操纵驾驶杆(盘或脚蹬)就是控制液压助力器得 A:控制活门(或配汕柱塞)、 B:传动动作简、 C:舵而传动杆、 D:液压供汕开关、 回答:错误您得答案:正确答案:A A提示: 11、有些飞机得飞行操作系统中装有舵面锁泄机构(舵而锁),可将舵面锁立在一泄位置?舵而锁就是在 A :大风天飞机停放时使用,以防止舵面被风吹动使操作系统得构件受到撞击与磨损、 B:大风天平飞时使用,以保持飞机得稳定飞行、 C :地而停放与大风天得滑行时使用、 D:大风天滑行与大风天地而停放时使用、 回答:错误您得答案:正确答案:C A提示:
3第三章 飞机的稳定性和操纵性上课讲义
第三章飞机的稳定性和操纵性 3.1 飞机的稳定性 在飞行中,飞机会经常受到各种各样的扰动,如气流的波动、发动机工作不稳定、飞行员偶然触动驾驶杆等。这些扰动会使飞机偏离原来的平衡状态,而在偏离以后,飞机能否自动恢复原状,这就是有关飞机的稳定或不稳定的问题。 飞机的稳定性是飞机本身的一种特性,与飞机的操纵性有密切的关系。例如,飞行员操纵杆、舵,需要用力的大小,飞机对杆、舵操纵的反应等,都与飞机的稳定性有关。因此,研究飞机的稳定性是研究飞机操纵性的基础。 所谓飞机的稳定性,就是在飞行中,当飞机受微小扰动而偏离原来的平衡状态,并在扰动消失以后,不经驾驶员操纵,飞机能自动恢复原来平衡状态的特性。 3.1.1 纵向稳定性 飞机的纵向稳定性是指飞机绕横轴的稳定性。 当飞机处于平衡飞行状态时,如果有一个小的外力干扰,使它的攻角变大或变小,飞机抬头或低头,绕横轴上下摇摆(也称为俯仰运动)。当外力消除后,驾驶员如果不操纵飞机,而靠飞机本身产生一个力矩,使它恢复到原来的平衡飞行状态,我们就说这架飞机是纵向稳定的。如果飞机不能靠自身恢复到原来的状态,就称为纵向不稳定的。如果它既不恢复,也不远离,总是上下摇摆,就称为纵向中立稳定的。飞机的纵向稳定性也称为俯仰稳定性。 飞机的纵向稳定性由飞机重心在焦点之前来保证。影响飞机纵向稳定性的主要因素有飞机的水平尾翼和飞机的重心位置。下面,我们首先来看一下水平尾翼是如何影响飞机的纵向稳定性的。 当飞机以一定的攻角作稳定的飞行时,如果一阵风从下吹向机头,使飞机机翼的攻角增大,飞机抬头。阵风消失后,由于惯性的作用,飞机仍要沿原来的方向向前冲一段路程。这时由于水平尾翼的攻角也跟着增大,从而产生了一个低头力矩。飞机在这个低头力矩作用下,使机头下沉。经过短时间的上下摇摆,飞机就可恢复到原来的飞行状态。 同样,如果阵风从上吹向机头,使机头下沉,飞机攻角减小,水平尾翼的攻角也跟着减小。这时水平尾翼上产生一个抬头力矩,使飞机抬头,经过短时间的上下摇摆,也可使飞机恢复到原来的飞行状态。 除水平尾翼外,飞机的重心位置对纵向稳定性也有较大的影响。重心靠后的飞机,其纵向稳定性要比重心靠前的差。其原因是:重心与焦点距离小攻角改变时产生的附加力矩减小。对于重心靠后的飞机,当飞机受扰动而增大攻角时,机翼产生的附加升力是使机头上仰,攻角进一步增大,形成不稳定力矩。这时主要靠水平尾翼的附加升力,使机头下俯,攻角减小,保证飞机的纵向稳定性。
飞机的稳定性和操纵性
第三章飞机的稳定性和操纵性 飞机的稳定性 在飞行中,飞机会经常受到各种各样的扰动,如气流的波动、发动机工作不稳定、飞行员偶然触动驾驶杆等。这些扰动会使飞机偏离原来的平衡状态,而在偏离以后,飞机能否自动恢复原状,这就是有关飞机的稳定或不稳定的问题。 飞机的稳定性是飞机本身的一种特性,与飞机的操纵性有密切的关系。例如,飞行员操纵杆、舵,需要用力的大小,飞机对杆、舵操纵的反应等,都与飞机的稳定性有关。因此,研究飞机的稳定性是研究飞机操纵性的基础。 所谓飞机的稳定性,就是在飞行中,当飞机受微小扰动而偏离原来的平衡状态,并在扰动消失以后,不经驾驶员操纵,飞机能自动恢复原来平衡状态的特性。 纵向稳定性 飞机的纵向稳定性是指飞机绕横轴的稳定性。 当飞机处于平衡飞行状态时,如果有一个小的外力干扰,使它的攻角变大或变小,飞机抬头或低头,绕横轴上下摇摆(也称为俯仰运动)。当外力消除后,驾驶员如果不操纵飞机,而靠飞机本身产生一个力矩,使它恢复到原来的平衡飞行状态,我们就说这架飞机是纵向稳定的。如果飞机不能靠自身恢复到原来的状态,就称为纵向不稳定的。如果它既不恢复,也不远离,总是上下摇摆,就称为纵向中立稳定的。飞机的纵向稳定性也称为俯仰稳定性。 飞机的纵向稳定性由飞机重心在焦点之前来保证。影响飞机纵向稳定性的主要因素有飞机的水平尾翼和飞机的重心位置。下面,我们首先来看一下水平尾翼是如何影响飞机的纵向稳定性的。
当飞机以一定的攻角作稳定的飞行时,如果一阵风从下吹向机头,使飞机机翼的攻角增大,飞机抬头。阵风消失后,由于惯性的作用,飞机仍要沿原来的方向向前冲一段路程。这时由于水平尾翼的攻角也跟着增大,从而产生了一个低头力矩。飞机在这个低头力矩作用下,使机头下沉。经过短时间的上下摇摆,飞机就可恢复到原来的飞行状态。 同样,如果阵风从上吹向机头,使机头下沉,飞机攻角减小,水平尾翼的攻角也跟着减小。这时水平尾翼上产生一个抬头力矩,使飞机抬头,经过短时间的上下摇摆,也可使飞机恢复到原来的飞行状态。 除水平尾翼外,飞机的重心位置对纵向稳定性也有较大的影响。重心靠后的飞机,其纵向稳定性要比重心靠前的差。其原因是:重心与焦点距离小攻角改变时产生的附加力矩减小。对于重心靠后的飞机,当飞机受扰动而增大攻角时,机翼产生的附加升力是使机头上仰,攻角进一步增大,形成不稳定力矩。这时主要靠水平尾翼的附加升力,使机头下俯,攻角减小,保证飞机的纵向稳定性。 方向稳定性 飞机的方向稳定性是指飞机绕立轴的稳定性。 飞机的方向稳定力矩是在侧滑中产生的。所谓侧滑是指飞机的对称面与相对气流方向不一致的飞行。它是一种既向前、又向侧方的运动。 飞机带有侧滑时,空气则从飞机侧方吹来。这时,相对气流方向与飞机对称面之间的夹角称为“侧滑角”,也称“偏航角”。 对飞机方向稳定性影响最大的是垂直尾翼。另外,飞机机身的侧面迎风面积也起相当大的作用。其它如机翼的后掠角、发动机短舱等也有一定的影响。 当飞机稳定飞行时,不存在偏航角,处于平衡状态。如果有一阵风突然吹来,使机头向右偏(此时,相对气流从左前方吹来,称为左侧滑),便有了偏航角。阵风消除后,由于惯性作用,飞机仍然保持原来的方向,向前冲一段路程。这时相对风吹到偏斜的垂
飞机稳定性和操作性分析(2)
毕业设计(论文)任务书 I、毕业设计(论文)题目: 飞机稳定性和操作性分析 II、毕业设计(论文)使用的原始资料(数据)及设计技术要求: 原始资料: 给定某飞机原始数据 设计技术要求: 1.进行飞机稳定性和操纵性等因素计算。 2.用C或Matlab语言编制计算程序。 3.用给定某飞机机型调试程序; 4.进行理论计算:计算结果以数据表和曲线形式给出。 5.对计算结果进行分析,写出分析报告。 III、毕业设计(论文)工作内容及完成时间: 1.收集有关资料,并完成开题报告; 3.10.-3.17 1周2.相关外文文献资料的阅读与翻译(6000字符以上) 3.17-3.31 2周3.用C或Matlab语言编制计算程序; 3.31-4.28 4周4.调试程序,进行理论计算; 4.28-5.26 4周5.对计算结果进行分析,整理分析报告; 5.26-6.14 3周6.撰写毕业论文及答辩准备; 6.14-6.20 1周
Ⅳ、主要参考资料: [1].飞机设计手册总编委会编,飞机设计手册,航空工业出版社,2005.10; [2].李为吉编,现代飞机总体综合设计,西北工业大学出版社,2001.12; [3].李为吉编,飞机总体设计,西北工业大学出版社,2005.1; [4].顾诵芬编,飞机总体设计,北京航空航天大学出版社,2006.12;; [5].潭浩强编,C程序设计,清华大学出版社,1991.7; [6].Proceedings of the International Symposium on, Advancement of Aerospace Education and Collaborative Research in the 21st Century, June 17-19,2004,HANKUK AVIATION UNIVERSITY. 飞行器工程学院(系)飞行器设计与工程专业类班 学生(签名): 日期:自2016 年 3 月10 日至2016 年 6 月20日 指导教师(签名): 助理指导教师(并指出所负责的部分): 飞行器设计工程系(室)主任(签名):何国毅 附注:任务书应该附在已完成的毕业设计说明书首页。
飞机飞行操作系统
一单选 1. 飞行操纵系统中主操纵系统在飞行中的功用是 A:用来操纵副翼、方向舵和升降舵的运动. B:操纵飞机绕纵轴、立轴和横轴转动,以改变或保持飞机的飞行姿态. C:操纵飞机沿纵轴、立轴和横轴运动,以改变或保持飞机的飞行姿态. D:操纵飞机起飞、着陆和上升、下降. 回答: 错误你的答案: 正确答案: B 提示: 2. 在飞行中,飞机需要向左改变航向时应 A:蹬左脚蹬;向右转驾驶盘. B:向左转驾驶盘;蹬左脚蹬. C:向左转驾驶盘;蹬右脚蹬. D:蹬右脚蹬;向右转驾驶盘. 回答: 错误你的答案: 正确答案: B 提示: 3. 飞行操作系统中的手操纵和脚操纵动作 A:与人体运动的本能反应相一致. B:与人体运动的本能反应不一致. C:与飞机运动相反. D:手操纵动作与人体的本能反应一致,脚操纵与人体的本能反应不一致. 回答: 错误你的答案: 正确答案: A 提示: 4. 操纵飞机升降舵是为了使飞机 A:绕横轴转动. B:使飞机作起飞、着陆运动. C:沿飞机横轴方向运动. D:绕纵轴作旋转运动. 回答: 错误你的答案: 正确答案: A 提示: 5. 飞行员操纵飞机盘旋爬高时,后带驾驶杆并左转驾驶盘,那么右边副翼及升降舵的运动是 A:向下偏和向下偏.
B:向上偏和向下偏. C:向上偏和向上偏. D:向下偏和向上偏. 回答: 错误你的答案: 正确答案: D 提示: 6. 所谓飞行操作系统的主操纵力是指 A:飞行员进行主操纵时施加在主操纵机构上的力. B:飞行员进行主操纵时电传动机构操纵摇臂施加在各主操纵面上的作用力. C:飞行员进行主操纵时所要提供的最大操纵力. D:飞行员进行主操纵使主操纵面偏转后操纵面产生的使飞机改变飞行姿态的空气动力. 回答: 错误你的答案: 正确答案: A 提示: 7. 根据操纵力的传递特点可将飞机主操纵型式分为 A:人工操纵与自动操纵. B:无助力机械式主操纵与助力式主操纵. C:液压式主操纵与电传式主操纵. D:机械式主操纵与液压式主操纵. 回答: 错误你的答案: 正确答案: B 提示: 8. 飞机操纵系统中可使软式传动的钢索改变方向的是 A:松紧螺套. B:双摇臂. C:滑轮. D:导索环. 回答: 错误你的答案: 正确答案: B 提示: 9. 在软式传动中的钢索必须要有一定的预加张力,其原因是 A:防止气温变化使钢索松弛. B:在操纵舵面时减小钢索受力. C:防止钢索使用过程中变松. D:克服“弹性间隙”,改善系统灵敏性. 回答: 错误你的答案: 正确答案: D
飞行操纵系统
飞行操纵系统 摘要:飞行操纵系统是保障民航飞机在天空安全可靠飞行的重要系统。它是飞机上所有用来传递操纵指令,驱动舵面运动的所有部件和装置的总和,用于控制飞机的飞行姿态、气动外形和乘坐品质。波音737NG作为典型的液压助力机械式主操作系统,对其研究具有重要意义。因此,本文将结合波音737NG对飞机的主操纵系统和辅助操纵系统做主要介绍。 正文: 飞行操纵系统分类很多,根据操纵信号的来源不同可分为人工飞行操纵系统和自动飞行操纵系统。自动飞行操纵系统操纵信号由系统本身产生,而人工飞行操纵系统操纵信号由驾驶员产生。在人工操纵系统中,通常又分为主操纵系统和辅助操纵系统。主操纵系统指驱动副翼、升降舵和方向舵,使飞机产生绕纵轴、横轴、立轴转动的系统。其他驱动扰流板、前缘装置、后缘襟翼和水平安定面配平等辅助操纵面的操纵系统均称为辅助操纵系统。 一、飞行主操作系统 1、副翼 飞机副翼通常铰接在机翼外侧后缘,在大型飞机的组合横向操纵系统中,通常有4块副翼----2块内副翼和2块外副翼。低速飞行时,内外副翼可以共同进行横向操作;高速飞行时,仅有内副翼进行横向操作。 副翼系统操纵飞机绕纵轴进行滚转运动,运动期间,一侧机翼的
副翼上偏,另一侧机翼的副翼下偏,两侧机翼产生升力差,飞机完成滚转。 图一典型副翼操纵系统原理 如图所示为737NG飞机的副翼操纵系统,采用并列驾驶盘式操纵机构,两驾驶盘通过互联鼓轮柔性相连。当转动任意驾驶盘产生操纵信号都可以按如下路径向后传递:驾驶盘、左侧副翼鼓轮、钢索、副翼输入扇形轮、副翼输入扭力管、输入摇臂和输入杆、液压助力器、输出摇臂和输出扭力管、输出鼓轮、钢索、扇形轮、传动杆、副翼。其中关键部件为驾驶盘柔性互联机构、液压助力器与副翼感觉定中机构。驾驶盘柔性互联机构用于防止驾驶盘卡阻。正常情况下,操纵一侧驾驶盘,另一侧随动。当右侧驾驶盘卡阻,左侧机长可以操纵左驾驶盘通过左钢索系统操纵副翼;当左驾驶盘卡阻时,副驾驶可以使用右驾驶盘操纵扰流板进行应急横滚操作。现代民航客机舵面的气动载荷较大,故采用液压助力器进行助力操作。液压助力器输入是一个机
3第三章飞机的稳定性和操纵性上课讲义
精品文档 第三章飞机的稳定性和操纵性 3.1 飞机的稳定性 在飞行中,飞机会经常受到各种各样的扰动,如气流的波动、发动机工作不稳定、飞行员偶然触动驾驶杆等。这些扰动会使飞机偏离原来的平衡状态,而在偏离以后,飞机能否自动恢复原状,这就是有关飞机的稳定或不稳定的问题。 飞机的稳定性是飞机本身的一种特性,与飞机的操纵性有密切的关系。例如,飞行员操纵杆、舵,需要用力的大小,飞机对杆、舵操纵的反应等,都与飞机的稳定性有关。因此,研究飞机的稳定性是研究飞机操纵性的基础。 所谓飞机的稳定性,就是在飞行中,当飞机受微小扰动而偏离原来的平衡状态,并在扰动消失以后,不经驾驶员操纵,飞机能自动恢复原来平衡状态的特性。 3.1.1 纵向稳定性 飞机的纵向稳定性是指飞机绕横轴的稳定性。 当飞机处于平衡飞行状态时,如果有一个小的外力干扰,使它的攻角变大或变小,飞机抬头或低头,绕横轴上下摇摆(也称为俯仰运动)。当外力消除后,驾驶员如果不操纵飞机,而靠飞机本身产生一个力矩,使它恢复到原来的平衡飞行状态,我们就说这架飞机是纵向稳定的。如果飞机不能靠自身恢复到原来的状态,就称为纵向不稳定的。如果它既不恢复,也不远离,总是上下摇摆,就称为纵向中立稳定的。飞机的纵向稳定性也称为俯仰稳定性。 飞机的纵向稳定性由飞机重心在焦点之前来保证。影响飞机纵向稳定性的主要因素有飞机的水平尾翼和飞机的重心位置。下面,我们首先来看一下水平尾翼是如何影响飞机的纵向稳定性的。 当飞机以一定的攻角作稳定的飞行时,如果一阵风从下吹向机头,使飞机机翼的攻角增大,飞机抬头。阵风消失后,由于惯性的作用,飞机仍要沿原来的方向向前冲一段路程。这时由于水平尾翼的攻角也跟着增大,从而产生了一个低头力矩。飞机在这个低头力矩作用下,使机头下沉。经过短时间的上下摇摆,飞机就可恢复到原来的飞行状态。 同样,如果阵风从上吹向机头,使机头下沉,飞机攻角减小,水平尾翼的攻角也跟着减小。这时水平尾翼上产生一个抬头力矩,使飞机抬头,经过短时间的上下摇摆,也可使飞机恢复到原来的飞行状态。 除水平尾翼外,飞机的重心位置对纵向稳定性也有较大的影响。重心靠后的飞机,其纵向稳定性要比重心靠前的差。其原因是:重心与焦点距离小攻角改变时产生的附加力矩减小。对于重心靠后的飞机,当飞机受扰动而增大攻角时,机翼产生的附加升力是使机头上仰,攻角进一步增大,形成不稳定力矩。这时主要靠水平尾翼的附加升力,使机头下俯,攻角减小,保证飞机的纵向稳定性。 精品文档
飞机各个系统的组成及原理
一、外部机身机翼结构系统 二、液压系统 三、起落架系统 四、飞机飞行操纵系统 五、座舱环境控制系统 六、飞机燃油系统 七、飞机防火系统 一、外部机身机翼结构系统 1、外部机身机翼结构系统组成:机身机翼尾翼 2、它们各自的特点和工作原理 1)机身 机身主要用来装载人员、货物、燃油、武器和机载设备,并通过它将机翼、尾翼、起落架等部件连成一个整体。在轻型飞机和歼击机、强击机上,还常将发动机装在机身内。 2)机翼 机翼是飞机上用来产生升力的主要部件,一般分为左右两个面。 机翼通常有平直翼、后掠翼、三角翼等。机翼前后缘都保持基本平直的称平直翼,机翼前缘和后缘都向后掠称后掠翼,机翼平面形状成三角形的称三角翼,前一种适用于低速飞机,后两种适用于高速飞机。近来先进飞机还采用了边条机翼、前掠机翼等平面形状。
左右机翼后缘各设一个副翼,飞行员利用副翼进行滚转操纵。 即飞行员向左压杆时,左机翼上的副翼向上偏转,左机翼升力下降;右机翼上的副翼下偏,右机翼升力增加,在两个机翼升力差作用下飞机向左滚转。为了降低起飞离地速度和着陆接地速度,缩短起飞和着陆滑跑距离,左右机翼后缘还装有襟翼。襟翼平时处于收上位置,起飞着陆时放下。 3)尾翼 尾翼分垂直尾翼和水平尾翼两部分。 1.垂直尾翼 垂直尾翼垂直安装在机身尾部,主要功能为保持飞机的方向平衡和操纵。 通常垂直尾翼后缘设有方向舵。飞行员利用方向舵进行方向操纵。当飞行员右蹬舵时,方向舵右偏,相对气流吹在垂尾上,使垂尾产生一个向左的侧力,此侧力相对于飞机重心产生一个使飞机机头右偏的力矩,从而使机头右偏。同样,蹬左舵时,方向舵左偏,机头左偏。某些高速飞机,没有独立的方向舵,整个垂尾跟着脚蹬操纵而偏转,称为全动垂尾。 2.水平尾翼 水平尾翼水平安装在机身尾部,主要功能为保持俯仰平衡和俯仰操纵。低速飞机水平尾翼前段为水平安定面,是不可操纵的,其后缘设有升降舵,飞行员利用升降舵进行俯仰操纵。即飞行员拉杆时,升降舵上偏,相对气流吹向水平尾翼时,水平尾翼产生
飞行操纵系统
飞行操纵系统
飞行操纵系统 ——飞机系统结课论文 指导老师:闫凤良 班级:080441D 学号:080441436 姓名:朱仕广 2010.6.25
摘要:飞行操纵系统是飞机在天空中自由飞行必不可少的系统。飞机飞行操纵系统是飞机上用来传递操纵指令,驱动舵面运动的所有部件和装置的总称,用于飞机飞行姿态、速度、轨迹的控制。此文对飞机的飞行操纵系统、空客A320的操纵系统和相关案例进行简单介绍。 关键词:飞行操纵系统空客A320的操纵系统相关案例 正文: 飞机要想在天空中自由自在的翱翔,飞行操纵系统是必不可少的。飞行操纵系统让飞机在空中能按照人的意愿自由改变飞行状态,从而飞抵人们想要飞去的地方。下面,我们简单介绍飞机的飞行操纵系统、空客A320的操纵系统和相关案例。 一、飞行操纵系统 定义:飞机飞行操纵系统是飞机上用来传递操纵指令,驱动舵面运动的所有部件和装置的总称,用于飞机飞行姿态、速度、轨迹的控制。
1.飞行操纵系统分类 按照操纵指令的来源分为:人工飞行操纵系统和自动飞行控制系统。 (1)人工飞行操纵系统:其操纵信号由驾驶员发出。包括主飞行操纵系统和辅助飞行操纵系统。 主飞行操纵系统:操纵升降舵、方向舵、副翼、三个主舵面,实现飞机的俯仰、偏航和滚转操纵;辅助飞行操纵系统:操纵襟翼、副翼、扰流板、调整片等增升、增阻及水平安定面配平、方向舵配平等系统。 (2)自动飞行控制系统:其操纵信号由系统本身发出。 对飞机实施自动和半自动控制,协助驾驶员工作或自动控制飞机对扰动的响应。 包括:自动驾驶、飞行指引和自动油门。 按照指令的执行方式来分: (1)机械式操纵系统 (2)电传操纵系统 2.基本飞行操纵原理 (1)飞机的纵向操纵是通过操纵驾驶杆或驾驶
飞机横航向稳定性分析
编号 毕业设计题目飞机横航向稳定性分析 学生姓名 学号 学院 专业 班级 指导教师 二〇一六年六月
本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的毕业设计(论文)(题目:)是本人在导师的指导下独立进行研究所取得的成果。尽本人所知,除了毕业设计(论文)中特别加以标注引用的内容外,本毕业设计(论文)不包含任何其他个人或集体已经发表或撰写的成果作品。 作者签名:年月日 (学号):
飞机横航向稳定性分析 摘要 飞机的稳定性是保证飞行安全的最基本要求,本文主要目的是对常规布局飞机的横航向稳定性进行分析,并利用Matlab编写程序来实现飞行器横航向稳定性分析;我们首先建立飞行器的运动学方程和动力学方程,得到飞行器正常飞行的力学模型,利用模型充分研究影响飞行器横航向稳定性的因素后,为了利用矩阵工具对方程进行求解,我们采用合理方法使飞行器运动方程线性化;线性化后我们发现飞机的横、纵向方程并不耦合,我们把飞机横向线性方程分离出来,并将其整理成矩阵形式,然后求出矩阵的特征值和特征向量,利用特征值与飞行模态的对应关系就可以确定飞机的稳定性 关键词:稳定性,运动方程,建模,线性化
Aircraft lateral and directional stability Analysis System Abstract The stability of the aircraft is the most basic requirements to ensure flight safety, the main purpose of this article is lateral and directional stability of the general layout of the aircraft for analysis and programming using Matlab to achieve the aircraft lateral and directional stability analysis; we first establish the kinematics of the aircraft equation and dynamic equation, the mechanical model of aircraft normal flight, the full study using the model aircraft after the impact factors of stability cross course, in order to take advantage of tools matrix equation is solved, we have adopted a reasonable approach enables linear equations of motion of the aircraft; linearization we found that the aircraft's horizontal and vertical coupling equation does not, we separated the plane transverse linear equations, and organized into a matrix, and then find the eigenvalues and eigenvectors using the eigenvalues and the corresponding flight modes relations can determine the stability of the aircraft Key Words:Stability; Equations of motion; Modeling; Linearization
上民航执照考试册-第5章飞行操作系统
(上册)第5章飞行操纵系统 1、飞机沿立轴方向运动叫偏航,由方向舵控制;飞机沿横轴方向运动叫俯仰,由升降舵控制;飞机沿纵轴方向运动叫横滚由副翼控制。 2、侧杆操纵机构:双侧杆动作输出信号是叠加信号(机长和副驾驶同时操纵侧杆时),飞行计算机(FC)将两个信号叠加后的信号作为最终的控制信号。 3、脚蹬的功用:(1)方向舵,(2)机轮转弯,(3)机轮刹车。 4、在软式传动机构中,都使用两根钢索构成回路,以保证舵面能在两个相反的方向偏转。 5、钢索的规格:直径、股数、钢丝数(每股)。 最广泛使用的钢索是7×7和7×19两种。 钢索的直径相同,股数越多,它的柔性越好。 6、钢索的常见故障:断丝、磨损、锈蚀。 7、导索环轴线与钢索直线之间的偏斜不能大于3度。 8、密封导索装置安装在钢索穿越增压隔框等需要密封的地方。 9、飞机机体和内部钢索受环境温度影响。 10、钢索松紧螺套装配的注意事项: (1)将螺套两端的接头同时拧上螺纹; (2)调整后检查拧入深度,露在套外的螺纹不得超过三牙; (3)完成工作后,按规定打保险。 11、钢索张力补偿器的功用是保持钢索的正确张力,而不受飞机外载荷的变化和周围温度变化的影响。 12、钢索张力补偿器上的标尺刻度可以指示出钢索的张力,而不需要张力器和其他仪器。 13、当受到压力时,传动杆就可能发生弯曲现象,称为失去总稳定性(又称杆轴失稳)。压杆时发生失稳现象就意味着杆已损坏。 14、差动副翼:使两侧副翼的上下偏转角度不同。这样做的目的是消除由于副翼偏转造成的两机翼阻力差,消除不必要的偏航。 15、传动系数K是指航偏角Δδ与杆位移ΔX的比值,K=Δδ/ΔX。 16、为满足高速飞机(速度变化范围大)的操纵性要求,装有非线性传动机构的操纵,杆行程和舵面偏转角度之间,成曲线关系。
自动飞行控制系统电子讲稿第一部分
学习情景1 课程导论 1.飞行控制系统发展概述 自动飞行控制系统已有100多年的研制历史,早在有人驾驶飞机出现之前,自动飞行装置即已出现。 1.1方向稳定器 1873年,法国雷纳德(C.C.Renard)无人多翼滑翔机的方向稳定器。 1.2 电动陀螺稳定装置-姿态稳定 1914年,美国的爱莫尔·斯派雷(Eimer Sperry)研制成功第一台可以保持飞机稳定平飞的电动陀螺稳定装置,该装置利用陀螺的稳定性和进动性,建立一个测量基准,用来测量飞机的姿态,它和飞机的控制装置连在一起,一旦飞机偏离指定的状态,这个机构就通过飞机的控制装置操纵飞机的舵面偏转使飞机恢复到原来的状态。 1.3 自动驾驶仪 20世纪30年代出现了可以控制和保持飞机高度、速度和航迹的自动驾驶仪。 第二次世界大战促使自动驾驶仪等设备得到进一步发展,由过去气动-液压到全电动,由三个陀螺分别控制三个通道改用一个 或两个陀螺来操纵飞机,并可作机动、爬高及自动保持高度等。 二次大战期间,美国和原苏联相继研制出功能较完善的电气式自动驾驶仪C-1和其仿制品A∏-5; 德国在二战后期研制成功飞航式导弹V-1和弹道式导弹V-2,
更进一步促进了飞行自动控制装置的研制和发展。 20世纪50年代后,和导航系统、仪表着陆系统相联,自动驾驶装置实现了长距离自动飞行和自动着陆。 1.4 自动飞行控制系统 1947年成功突破音障后,飞机的飞行包线(飞行速度和高度的变化范围)扩大,越来越复杂的飞行任务对飞机性能的要求也越来越高,仅靠气动布局和发动机设计所获得的飞机性能已经很难满足复杂飞行任务的要求。因此,借助于自动控制技术来改善飞机稳定性的飞行自动控制装置(如增稳系统)相继问世,在此基础上,自动驾驶仪的功能得到进一步的扩展,发展成为自动飞行控制系统(AFCS)。 20世纪60年代,产生了随控布局飞行器(congtrol configured vehicle--CCV)的设计思想。 20世纪60年代前的以模拟电路或模拟计算机为主要计算装置的飞行控制系统,逐渐发展成为现在已普遍应用的数字式飞行控制系统,这也为新技术应用和更复杂更完善系统的综合提供了实现的可能性。例如: 主动控制技术(active control technology—ACT); 余度技术 容错控制技术 20世纪80年代得到迅速发展的火/推/飞综合控制系统等。 20世纪70年代中期,由于计算机的应用使自动驾驶仪和飞机的指引系统组成一个综合系统,使飞机的各种传感器数据、指
飞机副翼操纵系统原理
张家界航空工业职业技术学院 毕业设计 题目:飞机副翼操纵系统分析 系别:数控工程系 专业:航空机电设备维修 姓名: 学号: 指导老师:
摘要 本论文主要阐述了关于飞机副翼的组成,个组成部件的工作原理,调整及日常维护方法。飞机的操纵性又可以称为飞机的操纵品质,是指飞机对操纵的反应特性。操纵则是飞行员通过驾驶机构改变飞机的飞行状态。改变飞机纵向运动(如俯仰)的操纵称为纵向操纵,主要通过推、拉驾驶杆,使飞机的升降舵或全动平尾向下或向上偏转,产生俯仰力矩,使飞机作俯仰运动。使飞机绕机体纵轴旋转的操纵称为横向操纵,主要由偏转飞机的副翼来实现。 关键词:驾驶杆传动杆传动机构载荷感觉器
Abstract The main thesis expounded aileron plane about the composition of component parts of the working principle, adjustment and routine maintenance methods. Manipulate the plane of the plane can be referred to as the quality of the manipulation means to manipulate the plane's response characteristics. Manipulation is to change the pilot institutions have passed the driving plane flight status. Vertical plane to change the sport (such as pitch) of manipulation known as vertical manipulation, mainly through the push, pull stick, so that the elevator or the whole plane Hirao moving downward or upward deflection, resulting in pitching moment, so that plane for pitch sports. Plane around the longitudinal axis so that rotation of the body known as the lateral manipulation manipulation, mainly by the plane's aileron deflection to achieve. Key word:Stick load transmission rod drive mechanism sensilla
飞机的稳定性能
飞机的稳定性能 飞机在空中飞行,要求纵向运动应具有静稳定性,即绕飞机横轴的运动静稳定性;而且也要求飞机绕横轴和竖轴运动也具有静稳定性。从机头贯穿机身到机尾的轴叫纵轴(Ox轴),从左翼通过重心到右翼并与纵轴垂直的轴叫横轴(Oy轴)。这两根轴同处在一个平面内,比如水平面内。通过重心并和上述两根轴相垂直到轴叫竖轴(Oz轴)。飞机在铅垂平面(即Oxz平面)内的运动,称为纵向运动;绕横轴Oy的转动叫俯仰运动;绕竖轴Oz的转动叫偏航运动;绕纵轴Ox的转动叫滚转运动。 为了满足飞机的纵向静稳定性,飞机焦点位置和飞机重心位置之间的关系必须满足ΔCm/ΔCL>0。当飞机外形一定时,飞机焦点位置是确定的,反过来就要求在飞机使用过程中的重心位置必须位于允许重心变化的范围内才行。重心的后限是由静稳定性要求确定的,它不能跑到飞机焦点位置的后面去。重心也有前限,重心前移可以增加飞机的静稳定性,但并不是静稳定性越大越好。例如,静稳定性过大,升降舵的操纵力矩就难以使飞机抬头增加迎角获得CL,max。换句话讲,是操纵性要求限制了重心前限。 同要求飞机绕横轴的运动具有纵向静稳定性一样,要求飞机绕竖轴和纵轴运动也应具有静稳定性,并分别称为方向静稳定性和横向静稳定性。 飞机具有横向静稳定性是指处于纵向平衡状态的飞机,一旦受到外界的干扰,打破了原先对飞机纵轴的力矩平衡,产生绕纵轴Ox的倾斜角φ;当外界干扰消除后,飞机靠自身产生的一个恢复力矩,有自动减小倾斜角φ和恢复原先平衡的趋势。保证飞机具有横向静稳定性的主要外形参数是机翼的后掠角和上反角。 跨声速或超声速飞机,为了减小激波阻力,大都采用了后掠角比较大的机翼,因此后掠角的横向静稳定性作用可能过大。所以,可以采用下反角(负的上反角)的外形来削弱后掠机翼的横向静稳定性。低、亚声速飞机大都为梯形直机翼,为了保证飞机的横向静稳定性要求,或多或少都有几度大小的上反角。