阻尼器设计
1.结构设计
2.工作原理
2.1磁流变液
磁流变液是在1948 年被Rabinow,J.发明的一种由非磁性基液(如矿物油、硅油等)、微小磁性颗粒、表面活性剂(也称稳定剂)等组合而成的智能型流体材料。在无磁场加入的条件下,磁流变液将表现为低粘度较强流动性的牛顿流体特性,加入磁场后,则会表现为高粘度低流动性的Bingham 流体特性。
非磁性基液是一种绝缘、耐腐蚀、化学性能稳定的有机液体。基液所拥有的特征是:粘度较低,磁流变液在没有磁场加入的条件下表现为低粘度状态,这样能够较好的降低磁流变液的零场粘度;
沸点高、凝固点较低,这样就可以确保磁流变液在温度变化波动较大的环境下工作依然可以保持较高的稳定性;较高的密度,能够保证磁流变液不会因沉降问题而无法正常使用;
无毒无味、廉价,保障其安全性的同时做到能够广泛使用。
微小磁性颗粒是一种可离散、可极化的软磁性固体颗粒,其单位是微米数量级的。其主要的特征有[5]:
低矫顽力,对于已经磁化过的液体,加较小的磁场就能够使其恢复零磁场状态,即拥有较高的保磁能力;
高磁导率,能够在弱磁场中获得较强的磁感应强度从而节约能量;磁滞回线狭窄、内聚力小;
磁性颗粒的体积应相对大一些,用于存贮更多的能量。
表面活性剂是可以增加溶液或混合物等稳定性的化学物质。在实际使用过程中,磁流变液比较容易出现沉降分层现象,所以需要在磁流变液中加入表面活性剂保证物理化学性能的平衡,减少分层、降低沉降。
2.2磁流变液的工作模式
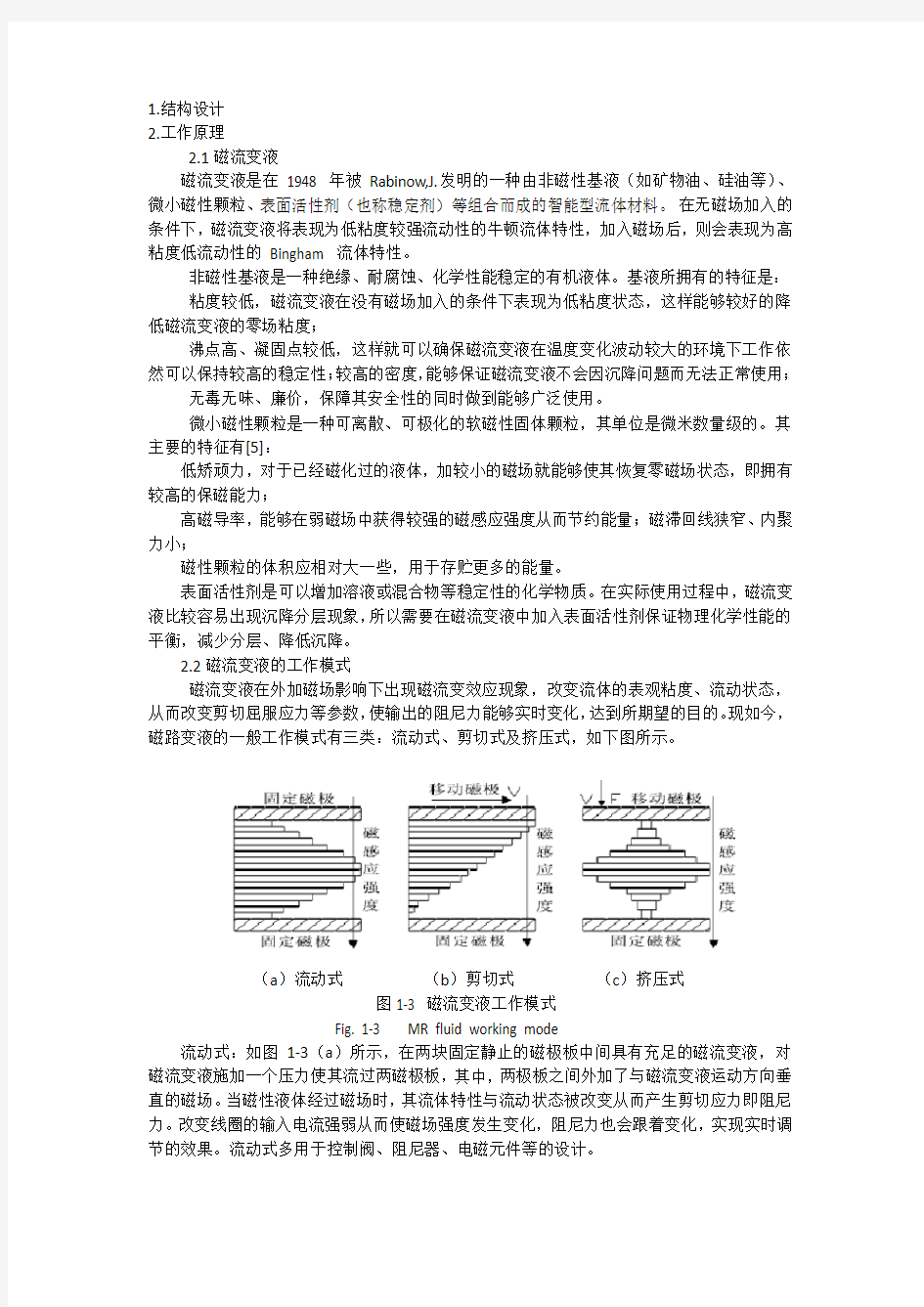
磁流变液在外加磁场影响下出现磁流变效应现象,改变流体的表观粘度、流动状态,从而改变剪切屈服应力等参数,使输出的阻尼力能够实时变化,达到所期望的目的。现如今,磁路变液的一般工作模式有三类:流动式、剪切式及挤压式,如下图所示。
(a)流动式(b)剪切式(c)挤压式
图1-3 磁流变液工作模式
Fig. 1-3 MR fluid working mode
流动式:如图1-3(a)所示,在两块固定静止的磁极板中间具有充足的磁流变液,对磁流变液施加一个压力使其流过两磁极板,其中,两极板之间外加了与磁流变液运动方向垂直的磁场。当磁性液体经过磁场时,其流体特性与流动状态被改变从而产生剪切应力即阻尼力。改变线圈的输入电流强弱从而使磁场强度发生变化,阻尼力也会跟着变化,实现实时调节的效果。流动式多用于控制阀、阻尼器、电磁元件等的设计。
剪切式:如图1-3(b)所示,两块磁极板相对运动,方向与两磁极板之间的间隙平行,其中,两磁极板之间具有充足的静止不运动的磁性液体,外加磁场的方向也垂直于两磁极板并作用在磁性液体上而产生阻尼力,同样可以调节线圈电流大小来控制阻尼力值。剪切式多用于研究设计离合器、制动器、阻尼器等。
挤压式:如图1-3(c)所示,与剪切式一样,是通过两个磁极板的运动来改变磁性液体的流体性能而得到阻尼力,但与剪切式不同的是,两磁极板的运动方向与磁场的方向是平行的。当挤压两块磁极板时,两磁极板之间的磁性液体受压向周围扩散运动,在磁场影响下产生阻尼力。阻尼力大小的调节与流动式、剪切式的方式一样。这种工作模式因其位移较小,只适用于设计行程不大的磁流变阻尼器。
除上面三种工作模式以外,还有一种较为常见的工作模式叫剪切阀式,这种工作模式是由流动式与剪切式组合而成的:磁流变液受压力的作用通过流动式与剪切式两者结合的磁场作用。
本设计采用一种特殊的流动式:两个固定磁极与产生可变磁场的线圈都固定在活塞上。
2.3阻尼液(磁流变液MRF)工作原理:
(1)磁流变液磁化成链状结构原因的相变理论[5],相变理论可以合理解释MRF 液-固转化的现象,但不能解决有关链束强度的问题。
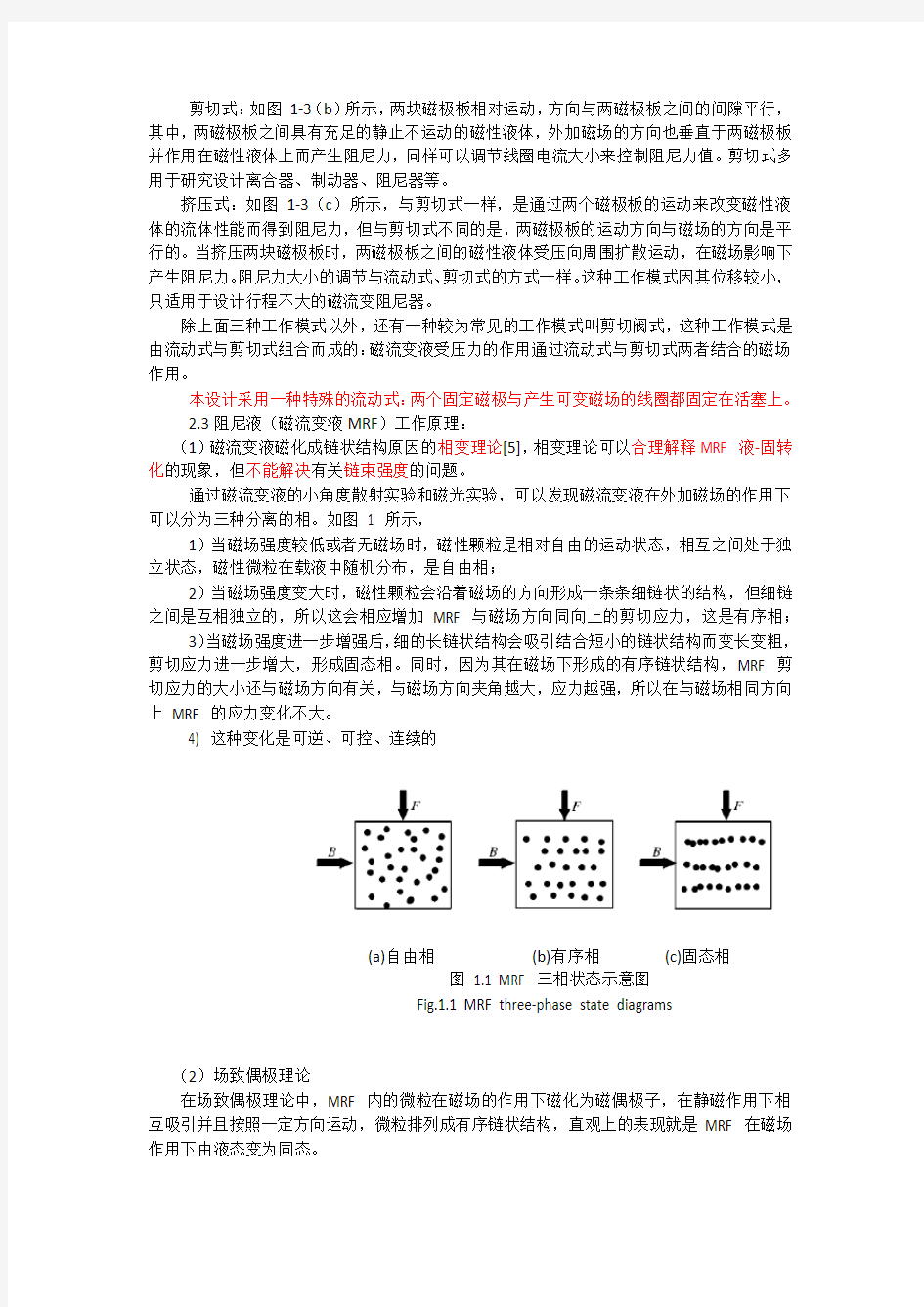
通过磁流变液的小角度散射实验和磁光实验,可以发现磁流变液在外加磁场的作用下可以分为三种分离的相。如图1 所示,
1)当磁场强度较低或者无磁场时,磁性颗粒是相对自由的运动状态,相互之间处于独立状态,磁性微粒在载液中随机分布,是自由相;
2)当磁场强度变大时,磁性颗粒会沿着磁场的方向形成一条条细链状的结构,但细链之间是互相独立的,所以这会相应增加MRF 与磁场方向同向上的剪切应力,这是有序相;
3)当磁场强度进一步增强后,细的长链状结构会吸引结合短小的链状结构而变长变粗,剪切应力进一步增大,形成固态相。同时,因为其在磁场下形成的有序链状结构,MRF 剪切应力的大小还与磁场方向有关,与磁场方向夹角越大,应力越强,所以在与磁场相同方向上MRF 的应力变化不大。
4) 这种变化是可逆、可控、连续的
(a)自由相(b)有序相(c)固态相
图 1.1 MRF 三相状态示意图
Fig.1.1 MRF three-phase state diagrams
(2)场致偶极理论
在场致偶极理论中,MRF 内的微粒在磁场的作用下磁化为磁偶极子,在静磁作用下相互吸引并且按照一定方向运动,微粒排列成有序链状结构,直观上的表现就是MRF 在磁场作用下由液态变为固态。
场致偶极理论指出了影响MRF 单链强度的因素,但是无法全面解释MRF 的剪切屈服强度与悬浮液微粒大小间的关联和链束变粗的过程。
(3)两种理论互相补充
2.4减震器磁场工作原理
MR 减振器的基本工作原理是通过改变电流大小控制磁场强度,利用磁场强度的变化改变MRF 的流变特性,从而实现对MR 减振器的精确控制。
MR 减振器的阻尼力主要由两个部分组成:粘滞阻尼力与库伦阻尼力,库伦阻尼力也叫作剪切阻尼力。其中,粘滞阻尼力是不受控制的,在特定的减振器中,主要与MRF 的零场粘度和减振器活塞的运动速度有关,且基本与速度和零场粘度的组合函数呈线性关系。在零磁场状态下,因为MRF 流变特性表现为牛顿流体,剪切阻尼力可忽略不计,只考虑粘滞阻尼力。剪切阻尼力主要与MRF 在磁场作用下的剪切应力有关,即MRF在“半固态”时活塞运动剪切MRF 所产生的力,但MRF 的剪切应力与磁感应强度为非线性关系。
2.5活塞工作原理
活塞由三部分构成:
活塞本身:承受阻尼液粘滞阻尼力与剪切阻尼力,耗能装置
当活塞在外力作用下向上运动,迫使上侧液腔内MRF 在高压作用下通过阻尼通道流入下侧液腔,因液体粘性与剪切应力使两侧液腔产生压差,这是MR 减振器阻尼力的主要来源。
固磁体:提供磁场,防止微粒沉降,提高MRF 的稳定性
线圈:线圈是磁场发生装置,串联反向缠绕在活塞体上,导线通过活塞杆与活塞体间的通孔引出到减振器外部,其产生的磁场与阻尼通道内液体流向垂直,用于控制MRF 的流变特性。改变电流大小控制磁场强度,利用磁场强度的变化改变MRF 的流变特性,从而实现对MR 减振器的精确控制。随电流增强,磁场增强,阻尼液随之由自由液体随之变稠,剪切阻尼力变大,耗能更多。反之亦然。
线圈绕组外涂有保护层,可选择环氧树脂等无腐蚀、耐高温、耐磨损的保护层材料。
3.选型
(1)缸体:
外部缸筒所用材料不仅要有足够的强度与刚度,还要有较高的导磁率和磁饱和率
缸筒作为MR 减振器的主要受力部件,与活塞杆相同,需要选择受力型材料。作为承受内压的薄壁型缸筒,设计时除了要进行壁厚、塑性变形验算外,还要进行爆裂验证。20#作为一种常用的机械加工材料,具有机械强度高、易于加工的优点,符合MR 减振器对缸筒性能的要求。
缸筒设计时要进行强度验算,假设减振器内的额定压力为pn,其应满足的验算条件为
()
或
()
式中:σy为缸筒材料的屈服强度,Pa;D1为缸筒的内径,m;D2为缸筒的外径,m。本文设计的缸筒内径40mm,外径48mm。
(2)阻尼液:
1)具有调节控制的可连续性、能耗少、无毒无腐蚀无污染、不易磨损、应用范围广等优点;同时,它也是一种复杂流体,组成成分比较多,包括载液与均布在载液中的微小磁性颗粒。为了防止微粒沉降,提高MRF 的稳定性,还会添加适量的添加剂
2) MRF 的耐高温性能十分重要,在高温时如何保证液体的无毒、低挥发、低膨胀性是首先要解决的问题。
3)抗沉降、抗凝结性
4)降低温度对MRF 应变性能的影响,散热性要好。
5)但如果MRF 的再分散性不符合要求,即沉降的MRF凝结成块,器件的运动是无法使其重新分布到载液中的
6)减磨性,MRF会对壁面和自身都会产生明显的磨损
7)良好的力学特性,为提高阻尼力的可调范围,需要MRF具有零场粘度低、屈服力高的特点。
(3)密封
端部密封方式的选择上,端盖与缸筒间的静密封选用两级O 型圈密封,
活塞杆与端盖间的动密封选用两级斯特封,并在外部添加防尘圈,防止外部灰尘、异物进入密封件内,影响密封件使用寿命
(4)活塞杆
活塞杆是减振器重要的传力部件,不仅要承受往复、高强度的拉伸与压缩载荷,同时还要具有抗弯曲、振动与横向冲击的能力。因此,为了满足活塞杆的强度韧性要求,选择20#作为加工材料。活塞杆直径主要依靠下式确定
式中:d1为活塞杆的外径,m;d2为活塞杆的内径,m;Fz为活塞杆受到的轴向力,N;[σ]为所选材料的容许应力,Pa。取Fz=5000N,[σ]=110MPa,样机活塞杆的尺寸经过计算取外径d1=12mm,内孔直径d2=5mm。
活塞杆内的长孔加工难度较高,传统工艺无法达到加工要求,可采用激光加工或直接选用内孔为5mm 的钢管进行加工。同时,为了降低加工难度,内壁粗糙度要求不高,因此,为防止漆包线穿过时划伤保护层,可以在内孔上涂抹绝缘漆、将漆包线利用热缩管进行保护或直接在导线绕组后将漆包线连接现有的绝缘导线,利用绝缘导线穿过活塞杆。同时,活塞杆往复运动过程中外壁与端盖内孔、MRF 内的铁磁微粒等存在摩擦,利用镀铬抛光的加工工艺对活塞杆外壁进行处理,可以增加活塞杆表面的光洁度、增强表面的防腐蚀性能、提高硬度与耐磨性,减小MR 减振器的摩擦阻力,延长活塞杆的使用寿命。
(5)活塞
活塞部分的零部件包括活塞体、导磁壳、活塞底板与线圈绕组。活塞体、导磁壳与活塞底板都是磁场磁路经过的地方,是其重要组成部分,所以要求所用材料具有高导磁率的特点,一般选用铁磁材料。但是铁磁材料的非线性磁化特性使得当磁场强度在增长到一定程
度后会发生饱和,所以为获得预设的MR 减振器阻尼力性能指标,应选择饱和磁感应强度高的材料。同时,磁滞现象会增大零磁场时的MR 减振器阻尼力,降低减振器的阻尼力可调范围,影响MR 减振器的控制精度,所选材料应为矫顽力和剩磁比较小的软磁材料。综上所述,该样机选择电工纯铁作为活塞体、导磁壳以及活塞底板的加工材料。导磁壳体与底板上的阻尼通道缝隙可以利用线切割工艺进行加工。
线圈绕组作为磁场发生装置是MR 减振器的核心部件,其在缠绕、装配过程中需要格外注意。本文选用的是0.56mm 的漆包线,虽然所加工机械零件都进行了圆角处理,但为防止刮伤漆包线,零部件尤其是活塞体表面需要进行绝缘处理(涂抹绝缘漆)。缠绕时应注意两级线圈绕向相反,并检测是否发生短路。线圈缠绕完成后,为防止减振器工作过程中MRF 内铁磁微粒磨损、划伤漆包线,需要在线圈表面涂抹一层保护层。
(6)阻尼间隙的设计原则
磁流变阻尼器阻尼间隙大小的选则直接影响其阻尼特性。由公式(2-7)可以得到,阻尼间隙h 与阻尼力F 的关系是反比关系。通过仔细分析比较可知:首先,在式子(2-10)中,库伦阻尼力与阻尼间隙h 是反比关系,在阻尼器的设计过程中,一般应尽可能的增大库伦阻尼力(可控)的值以增强控制效果,所以,想要得到较大的可控阻尼力,就需要减小阻尼间隙h 的取值;然后,从式子(2-9)中可以看出,粘滞阻尼力与阻尼间隙h 的立方为反比的关系,随着阻尼间隙h 的值变小,粘滞阻尼力会快速增大,这样的话,由式子(2-2)及式子(2-4)可以得到,阻尼力的动态可调范围将会迅速变小。
根据减震器的设计需求,应尽可能的增大磁流变阻尼器阻尼力的动态可调范围从而改善减震器的可控能力。因此,为了平衡磁场强度与阻尼力动态可调范围的关系,磁流变阻尼器阻尼间隙h 的值一般取为1~2mm。
(7)阻尼长度的设计原则活塞有效长度L 可以在不改变阻尼力动态可调范围的前提下,增大或减小减震器的阻尼力。由公式(2-7)可以看出,阻尼力会随着阻尼有效长度L 的增大而增大。但是,车辆底盘空间有限,不能过大的增加阻尼有效长度L 的值。因此,想要获得较大的阻尼力而又不改变阻尼力的可调范围,可以在车辆底盘空间允许的条件下,尽可能的增大阻尼有效长度L 的大小。
摩擦阻尼器
摩擦阻尼器在工程结构中的研究与应用1 史春芳,徐赵东,卢立恒 东南大学土木工程学院,江苏南京(210096) E-mail:Shichunfang998@https://www.360docs.net/doc/0a4112362.html, 摘要:摩擦阻尼器是一种耗能性能良好、构造简单、制作方便的减震装置。本文概述了摩擦阻尼器的种类、构造以及减震原理,介绍了摩擦阻尼器的力学模型和结构分析方法。摩擦阻尼器在实际中得到了大量的工程应用,本文简述了摩擦阻尼器在云南省洱源县振戎中学教学楼和食堂楼中的应用,以及在东北某大楼加固中的应用。 关键词:摩擦阻尼器,耗能减震,计算模型,分析方法 中国分类号:P315.966 1.引言 传统的抗震方法是通过结构本身的塑性变形来耗散地震能量,其实质就是把结构本身及构件作为“消能”元件,这样必然使结构产生不同程度的损坏,甚至产生严重的破坏和倒塌。结构控制,通过在结构上设置控制装置,由控制机构和结构一起来抵御地震等动力作用,使结构的动力反应减小。 在结构上附加耗能减震装置的减震方法是结构被动控制的一种。摩擦阻尼器作为一种耗能装置,因其耗能能力强,荷载大小、频率对其性能影响不大,且构造简单,取材容易,造价低廉,因而具有很好的应用前景。特别是在控制结构近断层地震反应和中高层结构地震反应方面有独特优势。摩擦阻尼器对结构进行振动控制的机理是:阻尼器在主要结构构件屈服前的预定荷载下产生滑移或变形,依靠摩擦或阻尼耗散地震能量,同时,由于结构变形后自振周期加长,减小了地震输入,从而达到降低结构地震反应的目的。 2.摩擦阻尼器的种类、构造以及减震机理 摩擦阻尼器的发展始于20世纪70年代末,随后为适应不同类型的建筑结构,国内外学者陆续研制开发了多种摩擦阻尼器,其摩擦力大小易于控制,可方便地通过调节预紧力大小来确定。目前,研究开发的摩擦阻尼器主要有:普通摩擦阻尼器、Pall摩擦阻尼器、Sumitomo 摩擦阻尼器、摩擦剪切铰阻尼器、滑移型长孔螺栓节点阻尼器、T形芯板摩擦阻尼器、拟粘滞摩擦阻尼器、多级摩擦阻尼器以及一些摩擦复合耗能器。 图1为普通摩擦阻尼器的构造,它是通过开有狭长槽孔的中间钢板相对于上下两块铜垫板的摩擦运动而耗能,调整螺栓的紧固力可改变滑动摩擦力的大小[1]。滑动摩擦力与螺栓的紧固力成正比,另外,钢与铜接触面之间的最大静摩擦力与滑动摩擦力差别小,滑动摩擦力的衰减也不大,保证摩擦耗能系统工作的稳定性。经过试验发现,摩擦力的衰减随螺栓紧固力的减小而增大,且摩擦力的衰减是螺栓松动引起的。 1本课题得到国家自然基金项目(50508010)、江苏省创新人才自然基金项目(BK2005410)和东南大学优秀青年骨干教师项目的资助。
二阶弹簧-阻尼系统PID控制器参数整定
《控制系统仿真与CAD》大作业 二阶弹簧—阻尼系统的PID控制器设计及参数整定 学校:上海海事大学 学院:物流工程学院 专业:电气工程及其自动化 班级:电气173班 学号:************ 姓名:李** 老师:** 时间:2020年6月13日
1. 题目与要求 考虑弹簧-阻尼系统如图1所示,其被控对象为二阶环节,传递函数()G s 如下,参数为M=1kg ,b=2N.s/m ,k=25N/m ,()1F s =。设计要求:用.m 文件和simulink 模型完成。 图 1 弹簧--阻尼系统 (1)控制器为P 控制器时,改变比例系数大小,分析其对系统性能的影响并绘制相应曲线。 (2)控制器为PI 控制器时,改变积分系数大小,分析其对系统性能的影响并绘制相应曲线。(例如当Kp=50时,改变积分系数大小) (3)设计PID 控制器,选定合适的控制器参数,使闭环系统阶跃响应曲线的超调量σ%<20%,过渡过程时间Ts<2s, 并绘制相应曲线。 2. 分析: (1)根据受力分析可得系统合力与位移之间微分方程: F kx x b x M =++&&& (2)对上得微分方程进行拉普拉斯变换,转化后的系统开环传递函数: 25211)()()(22++= ++== s s k bs Ms s F s X s G (3)系统输入为力R(S)=F(S),系统输出C(S)为位移X(S),系统框图如下: 图 2 闭环控制系统结构图 3. 控制器为P 控制器时: 控制器的传递函数p p K s G =)(,分别取p K 为1,10,20,30,40,50,60,70,80, (1)simulink 构建仿真模型如图3,文件名为:P_ctrl ;
阻尼器设计
1.结构设计 2.工作原理 2.1磁流变液 磁流变液是在1948 年被Rabinow,J.发明的一种由非磁性基液(如矿物油、硅油等)、微小磁性颗粒、表面活性剂(也称稳定剂)等组合而成的智能型流体材料。在无磁场加入的条件下,磁流变液将表现为低粘度较强流动性的牛顿流体特性,加入磁场后,则会表现为高粘度低流动性的Bingham 流体特性。 非磁性基液是一种绝缘、耐腐蚀、化学性能稳定的有机液体。基液所拥有的特征是:粘度较低,磁流变液在没有磁场加入的条件下表现为低粘度状态,这样能够较好的降低磁流变液的零场粘度; 沸点高、凝固点较低,这样就可以确保磁流变液在温度变化波动较大的环境下工作依然可以保持较高的稳定性;较高的密度,能够保证磁流变液不会因沉降问题而无法正常使用; 无毒无味、廉价,保障其安全性的同时做到能够广泛使用。 微小磁性颗粒是一种可离散、可极化的软磁性固体颗粒,其单位是微米数量级的。其主要的特征有[5]: 低矫顽力,对于已经磁化过的液体,加较小的磁场就能够使其恢复零磁场状态,即拥有较高的保磁能力; 高磁导率,能够在弱磁场中获得较强的磁感应强度从而节约能量;磁滞回线狭窄、内聚力小; 磁性颗粒的体积应相对大一些,用于存贮更多的能量。 表面活性剂是可以增加溶液或混合物等稳定性的化学物质。在实际使用过程中,磁流变液比较容易出现沉降分层现象,所以需要在磁流变液中加入表面活性剂保证物理化学性能的平衡,减少分层、降低沉降。 2.2磁流变液的工作模式 磁流变液在外加磁场影响下出现磁流变效应现象,改变流体的表观粘度、流动状态,从而改变剪切屈服应力等参数,使输出的阻尼力能够实时变化,达到所期望的目的。现如今,磁路变液的一般工作模式有三类:流动式、剪切式及挤压式,如下图所示。 (a)流动式(b)剪切式(c)挤压式 图1-3 磁流变液工作模式 Fig. 1-3 MR fluid working mode 流动式:如图1-3(a)所示,在两块固定静止的磁极板中间具有充足的磁流变液,对磁流变液施加一个压力使其流过两磁极板,其中,两极板之间外加了与磁流变液运动方向垂直的磁场。当磁性液体经过磁场时,其流体特性与流动状态被改变从而产生剪切应力即阻尼力。改变线圈的输入电流强弱从而使磁场强度发生变化,阻尼力也会跟着变化,实现实时调节的效果。流动式多用于控制阀、阻尼器、电磁元件等的设计。
无锡圣丰软钢阻尼器标准-Final
Q/CY Q/CY 0001-2010 无锡圣丰建筑新材料有限公司企业标准 JB剪切型软钢阻尼器 2010年3月1日执行 无锡圣丰建筑新材料有限公司
前言 建筑用JB剪切型软钢阻尼器是利用软钢作为能量吸收材料的阻尼器,具有体积小、吸收能量大、性能可靠等特点。 本标准是按照GB/T1.1—2000标准化工作导则的规定编写的。 本标准由无锡圣丰建筑新材料有限公司提出。 本标准由无锡圣丰建筑新材料有限公司归口。 本标准负责起草单位: 无锡圣丰建筑新材料有限公司 本标准参加起草单位: 无锡济邦隔震技术有限公司 南京工业大学 上海大学 本标准主要起草人: 王豫,曾松涛 标准审核人:许彦龙 标准批准人:王惠强 本标准为首次发布。
目录 1 范围 (5) 2 规范性引用文件 (5) 3 术语和定义 (5) 3.1 软钢阻尼器 (6) 3.2 软钢阻尼器设计使用年限 (6) 3.3 环境温度 (6) 3.4 阻尼器剪应变 (6) 3.5 阻尼器屈服力 (6) 3.6 阻尼器弹性(初始)刚度 (6) 3.7 阻尼器屈服位移 (6) 3.8 阻尼器第二刚度比 (6) 3.9 阻尼器极限力 (7) 3.10 阻尼器延伸率 (7) 4 分类与标记 (8) 4.1 分类 (8) 4.1.1 剪切屈服型 (8) 4.2 标记 (8) 4.2.1 标记方法 (8) 4.2.2 标记示例 (9) 5 技术要求 (9) 5.1 外观 (9) 5.2 钢材质量指标 (9) 5.3 尺寸偏差 (10) 5.4 性能 (10) 5.4.1 基本力学性能 (10) 5.4.2 极限力学性能 (10) 5.4.3 疲劳性能 (11) 5.4.4 其他相关性能 (11) 6 试验方法 (12) 6.1 外观 (12) 6.2 钢材 (12) 6.3 尺寸偏差 (12) 6.4 产品力学性能试验 (12) 6.4.1 基本力学性能 (12) 6.4.2 极限力学性能 (13) 6.4.3 疲劳性能 (14) 6.4.4 其他相关性能 (14) 6.4.5 实验曲线 (14) 7 检验规则 (17) 7. 1 检验分类 (17)
弹簧质量阻尼系统的建模与控制系统设计
分数: ___________ 任课教师签字:___________ 华北电力大学研究生结课作业 学年学期:第一学年第一学期 课程名称:线性系统理论 学生姓名: 学号: 提交时 目录 目录 (1) 1 研究背景及意义 (3) 2 弹簧-质量-阻尼模型 (3) 2.1 系统的建立 (3) 2.1.1 系统传递函数的计算 (4) 2.2 系统的能控能观性分析 (6) 2.2.1 系统能控性分析 (6) 2.2.2 系统能观性分析 (7) 2.3 系统的稳定性分析 (7) 2.3.1 反馈控制理论中的稳定性分析方法 (7) 2.3.2 利用Matlab分析系统稳定性 (8) 2.3.3 Simulink仿真结果 (9) 2.4 系统的极点配置 (10) 2.4.1 状态反馈法 (10) 2.4.2 输出反馈法 (11) 2.4.2 系统极点配置 (11)
2.5系统的状态观测器 (13) 2.6 利用离散的方法研究系统的特性 (15) 2.6.1 离散化定义和方法 (15) 2.6.2 零阶保持器 (16) 2.6.3 一阶保持器 (17) 2.6.4 双线性变换法 (18) 3.总结 (18) 4.参考文献 (19)
弹簧-质量-阻尼系统的建模与控制系统设计 1 研究背景及意义 弹簧、阻尼器、质量块是组成机械系统的理想元件。由它们组成的弹簧-质量-阻尼系统是最常见的机械振动系统,在生活中具有相当广泛的用途,缓冲器就是其中的一种。缓冲装置是吸收和耗散过程产生能量的主要部件,其吸收耗散能量的能力大小直接关系到系统的安全与稳定。缓冲器在生活中处处可见,例如我们的汽车减震装置和用来消耗碰撞能量的缓冲器,其缓冲系统的性能直接影响着汽车的稳定与驾驶员安全;另外,天宫一号在太空实现交会对接时缓冲系统的稳定与否直接影响着交会对接的成功。因此,对弹簧-质量-阻尼系统的研究有着非常深的现实意义。 2 弹簧-质量-阻尼模型 数学模型是定量地描述系统的动态特性,揭示系统的结构、参数与动态特性之间关系的数学表达式。其中,微分方程是基本的数学模型,不论是机械的、液压的、电气的或热力学的系统等都可以用微分方程来描述。微分方程的解就是系统在输入作用下的输出响应。所以,建立数学模型是研究系统、预测其动态响应的前提。通常情况下,列写机械振动系统的微分方程都是应用力学中的牛顿定律、质量守恒定律等。 弹簧-质量-阻尼系统是最常见的机械振动系统。机械系统如图2.1所示, 图2-1弹簧-质量-阻尼系统机械结构简图 其中、表示小车的质量,表示缓冲器的粘滞摩擦系数,表示弹簧的弹性系数,表示小车所受的外力,是系统的输入即,表示小车的位移,是系统的输出,即,i=1,2。设缓冲器的摩擦力与活塞的速度成正比,其中,,,,,。 2.1 系统的建立
20160803摩擦阻尼器研究分析
按照领导旨意: 摩擦阻尼消能减震技术的研究启动,对其基本概念提起审阅; 1.四种技术类型:摩擦耗能节点;板式摩擦阻尼器;筒式摩擦阻尼器;复合型摩擦阻尼器; 2.消能减震设计:一种新的抗震方法;“摩擦消能器”是一种构造简单,经济耐用的消能装置,适用于工程结构抗震。 3.四种控制形式:被动控制、主动控制、半主动控制、混合控制; 3.1被动控制减震技术的核心在于安装于结构中的阻尼器这种装置; 3.2结构震动控制就是通过调整结构的动力特性或提供外力抵御和地震载荷作用,让结构和控制系统共同抵御外界动荷载的作用,达到控制结构形态,减轻结构动力响应目的 3.3被动控制:不需要外部能源输入提供控制力控制过程不受结构反应和外界条件影响的控制方法。一般是在结构的某些部位附加子系统来改变结构的动力特性,消耗震动能量,达到减小结构动力反应的目的。 3.4被动控制技术因其造价低、可靠性高、施工简便的特点而得到广泛地应用。 3.5被动控制主要分为:结构隔震、动力吸震和消能减震。 3.6消能减震:就是把结构的某些非承重构件(如支撑、连接件等)设计成耗能杆件,或在结构的某些部位(节点、支撑等)装设阻尼装置,通过阻尼装置产生摩擦、弯曲(或剪切、扭转)、弹塑(或粘滞、粘弹)性滞回变形来耗散输入结构中的能量,以减小主体结构地震反应,从而避免结构发生破坏或倒塌。达到减震控制的目的。 3.7在消能减震理论分析、设计方法和试验经大量研究并制作多种消能器。在风载和小震作用下,消能器为结构提供足够的初始刚度,使结构处于弹性状态,当结构遭遇中、强震时,消能器发挥作用,产生较大阻尼,耗散地震能量,减轻结构损伤。 4.新型阻尼器“变阻尼粘滞阻尼器”: 4.1“可变阻尼力摩擦减振装置”: “向心式摩擦阻尼器”通过活塞、特别设计的阻尼棒共同控制阻尼的大小,使得阻尼可变可控,在不同的工作阶段可以预先设定为不同的参数值,不需要通
二阶弹簧—阻尼系统,PID控制器设计,参数整定
二阶弹簧—阻尼系统的PID控制器设计及参数整定
一、PID 控制的应用研究现状综述 PID 控制器(按闭环系统误差的比例、积分和微分进行控制 的调节器)自20世纪30年代末期出现以来,在工业控制领域得到了很大的发展和广泛的应用。它的结构简单,参数易于调整,在长期应用中已积累了丰富的经验。特别是在工业过程控制中,由于被控制对象的精确的数学模型难以建立,系统的参数经常发生变化,运用控制理论分析综合不仅要耗费很大代价,而且难以得到预期的控制效果。在应用计算机实现控制的系统中,PID 很容易通过编制计算机语言实现。由于软件系统的灵活性,PID 算法可以得到修正和完善,从而使数字PID 具有很大的灵活性和适用性。 二、研究原理 比例控制器的传递函数为:()P P G s K = 积分控制器的传递函数为:11()PI P I G s K T s =+ ? 微分控制器的传递函数为:11 ()PID P D I G s K T s T s =+ ?+? 三、设计题目 设计控制器并给出每种控制器控制的仿真结果(被控对象为二阶环节,传递 函数()G S ,参数为M=1 kg, b=2 N.s/m, k=25 N/m, F(S)=1);系统示意图如图1所示。
图1 弹簧-阻尼系统示意图 弹簧-阻尼系统的微分方程和传递函数为: F kx x b x M =++ 25 21 1)()()(22++= ++== s s k bs Ms s F s X s G 四、设计要求 通过使用MATLAB 对二阶弹簧——阻尼系统的控制器(分别使用P 、PI 、PID 控制器)设计及其参数整定,定量分析比例系数、积分时间与微分时间对系统性能的影响。同时、掌握MATLAB 语言的基本知识进行控制系统仿真和辅助设计,学会运用SIMULINK 对系统进行仿真,掌握PID 控制器参数的设计。 (1)控制器为P 控制器时,改变比例带或比例系数大小,分析对系统性能的影响并绘制响应曲线。 (2)控制器为PI 控制器时,改变积分时间常数大小,分析对系统性能的影响并绘制相应曲线。(当kp=50时,改变积分时间常数)
建筑用液体粘滞阻尼器设计方法简介
1.阻尼器应用的设计目标和理念 传统建筑,无论木结构,钢筋混凝土,钢结构已经有上百年的抗风,抗震历史,为什么提出在这些建筑中添加阻尼器精简总结,有以下几点原因: ●对于一些使用要求较高的建筑结构(超高层,大跨结构等),地震,抗风形成动力难题,需 要更合理的解决办法; ●对比其他传统方案,减少结构受力体系的造价; ●科学不断发展,开辟了解决结构工程问题的新思路;可以使结构最大限度的保持在弹性范围 内工作,为结构提升安全保障。 以某抗震加固工程为例,我们对剪力墙(传统方案)和液体粘滞阻尼器两个方案从理念和计算结果作 展情况和我们的应用体会,我们再谈一下在建筑上使用阻尼器的目标和理念。简单的说,我们安置阻尼器可以有以下几个目的。 A增加抗震、抗风能力 原设计可能已经可以满足所有规范规定的抗震抗风要求,加上液体粘滞阻阻尼器,在振动过程中起到耗能和增加结构阻尼的作用,从而降低结构反应的基底剪力,减少整个结构的受力,也就可以大大提高结构的抗地震能力。同时,只要阻尼器安装的合适,设置到不同的需要方向,还可以预防和减少原设计没有考虑,或考虑不足的振动受力。 对特别重要的结构,高发地震区,花钱不多,设置这一第二防线是很值得的。对于非严重地震区,也可以用阻尼器达到抗风和增加抗震能力的目的。 B.用阻尼器去防范罕遇大地震或大风 按小震不坏大振不倒的原则,我们可以用常规的设计办法使设计满足多遇地震的抗震要求。对于罕遇的大地震可能显得不足、不理想或不经济。用结构的被动保护系统-特别是阻尼器来等待和解决这罕遇大地震的问题,不仅新建结构建议采用这一设计理念,原设计未设防抗震或设防不足的结构加固工程也很适于。 这一理念会带来经济实用和可靠的结果,设计的好,可以为工程节省费用。国外抗震先进国家大都采用这一理念。在所有可能发生地震的地区,我们主要想提出推广的这一设计理念。 国外有的工程,在结构的小振设计中也充分利用施加了阻尼器的优越。他们大胆的用加阻尼器后的修正反应谱作结构的设计。 C.减少附属结构、设备、仪器仪表等第二系统的振动 在破坏性地震震害分析中,结构内部附属结构、设备、仪器仪表等第二系统的振动和破坏越来越引起我们的注意。从经济上看,这些内部系统的价值可能远远超过结构本身。增加结构保护系统出于
二阶弹簧阻尼系统ID控制器设计参数整定
二阶弹簧阻尼系统I D控制器设计参数整定 This model paper was revised by the Standardization Office on December 10, 2020
二阶弹簧—阻尼系统的PID 控制器设计及参数整定 一、PID 控制的应用研究现状综述 PID 控制器(按闭环系统误差的比例、积分和微分进行控制的调节器)自20世纪30年代末期出现以来,在工业控制领域得到了很大的发展和广泛的应用。它的结构简单,参数易于调整,在长期应用中已积累了丰富的经验。特别是在工业过程控制中,由于被控制对象的精确的数学模型难以建立,系统的参数经常发生变化,运用控制理论分析综合不仅要耗费很大代价,而且难以得到预期的控制效果。在应用计算机实现控制的系统中,PID 很容易通过编制计算机语言实现。由于软件系统的灵活性,PID 算法可以得到修正和完善,从而使数字PID 具有很大的灵活性和适用性。 二、研究原理 比例控制器的传递函数为: ()P P G s K = 积分控制器的传递函数为: 11()PI P I G s K T s =+? 微分控制器的传递函数为: 11()PID P D I G s K T s T s =+?+? 三、设计题目 设计控制器并给出每种控制器控制的仿真结果(被控对象为二阶环节,传递 函数()G S ,参数为M=1 kg, b=2 m, k=25 N/m, F(S)=1);系统示意图如图1所示。 图1 弹簧-阻尼系统示意图 弹簧-阻尼系统的微分方程和传递函数为: 四、设计要求
通过使用MATLAB 对二阶弹簧——阻尼系统的控制器(分别使用P 、PI 、PID 控制器)设计及其参数整定,定量分析比例系数、积分时间与微分时间对系统性能的影响。同时、掌握MATLAB 语言的基本知识进行控制系统仿真和辅助设计,学会运用SIMULINK 对系统进行仿真,掌握PID 控制器参数的设计。 (1)控制器为P 控制器时,改变比例带或比例系数大小,分析对系统性能的影响并绘制响应曲线。 (2)控制器为PI 控制器时,改变积分时间常数大小,分析对系统性能的影响并绘制相应曲线。(当kp=50时,改变积分时间常数) (3)设计PID 控制器,选定合适的控制器参数,使阶跃响应曲线的超调量%20%σ<,过渡过程时间2s t s <,并绘制相应曲线。 图2 闭环控制系统结构图 五、设计内容 (1)P 控制器:P 控制器的传递函数为: ()P P G s K =(分别取比例系数K 等于1、10、30和50,得图所示) Scope 输出波形: 仿真结果表明:随着Kp 值的增大,系统响应超调量加大,动作灵敏,系统的响应速度加快。Kp 偏大,则振荡次数加多,调节时间加长。随着Kp 增大,系统的稳态误差减小,调节应精度越高,但是系统容易产生超调,并且加大Kp 只能减小稳态误差,却不能消除稳态误差。 (2)PI 控制器:PI 控制器的传递函数为: 11()PI P I G s K T s =+? (K=50, 分别取积分时间Ti 等于10、1和得图所示)
新型软钢阻尼器的减震性能研究_李钢
振动与冲击 第25卷第3期J OURNAL OF V IBRAT I ON AND SHOCK Vo.l25No.32006 新型软钢阻尼器的减震性能研究 基金项目:大连市建委科技项目 收稿日期:2005-02-18修改稿收到日期:2005-04-15第一作者李钢男,博士生,1979年生李钢李宏男 (大连理工大学海岸及近海工程国家重点实验室,大连116023) 摘要提出了设计软钢阻尼器的新思路:利用钢板平面内受力提高初始刚度,并通过改变钢板平面几何形状增加变形耗能能力。通过对具有不同几何形状的软钢阻尼器模型进行拟静力往复加载试验研究,验证了此种软钢阻尼器具有良好的塑性耗能性能。数值计算表明,在地震动作用下装有新型软钢阻尼器框架体系具有良好的减震效果。 关键词:软钢阻尼器,结构控制,减震性能,参数研究 中图分类号:P315文献标识码:A 0引言 近年来,国内外的研究者在工程结构的隔震、减振与振动控制方面进行了大量的研究工作,取得了丰硕的成果[1-6]。传统的抗震设计是通过增强结构本身的抗震性能来抵御地震作用,即利用结构本身储存和消耗地震能量以满足结构抗震设防标准:小震不坏,中震可修,大震不倒。而这种抗震方式缺乏自我调节能力,在不确定的地震作用下,很可能不满足安全性的要求。而结构振动控制技术为结构抗震提供了一条合理有效的途径。其中,耗能减震作为一种被动控制措施是将输入结构的地震能量引向特别设置的机构和元件加以吸收和耗散,从而能够保护主体结构的安全。 软钢阻尼器是目前国内外广泛研究的各种耗能器中,构造简单、造价低廉、力学模型明确的一种被动耗能装置,屈服后在反复循环荷载作用下仍具有稳定的滞回特性。1972年,Ke lly等[3]在提出耗能减概念时就采用了软钢屈服耗能器,其中包括扭转梁、弯曲梁、U 型钢等形式。W h ittaker等[4]和Tsa i等[5]分别研究了X 型钢板和三角形钢板耗能器平面外的特性。日本Ka j-i m a公司提出了一种蜂窝状的软钢屈服耗能器,可安装在墙中或梁内。国内学者对此也做了相应的研究工作,欧进萍等[6]对组合钢板耗能器进行了研究,这种耗能器消除了软钢阻尼器中薄膜效应的影响。邢书涛等[7]提出了一种纵截面为中空菱形的矩形钢板阻尼器。目前,软钢阻尼器已应用于建筑结构中,如新西兰的六层政府办公大楼,其预制墙板的斜撑中采用了钢管耗能器[8];美国旧金山的非延性钢筋混凝土结构的抗震加固和墨西哥的一些建筑中[9]。 上述软钢阻尼器均是利用阻尼钢板平面外等厚度处同时屈服的特性来实现耗能作用,其优越性在于塑性变形较大,滞回性能稳定;不足之处在于这类软钢阻尼器初始刚度较小,承载能力低。若增大初始刚度,则需要增加阻尼器钢板的数量,这使得实际工程应用中存在着经济性与可行性问题。而采用钢板平面内受力方式,则可以在很大程度上提高其初始刚度及屈服力。1997年M ito等[10]通过试验研究了一种矩形剪切板阻尼器,但这种阻尼器由于平面内受力,钢板的四个角点处应力集中,在水平位移很小时就出现断裂现象,使得变形耗能能力相对较差。2003年T irca等[11]提出了一种平面内受力形式的钢阻尼器,并对装有此种阻尼器的中高层结构进行了性能分析,证明此阻尼器具有很好的耗能减震能力。 软钢阻尼器一般安装于梁与支撑的节点处,在正常使用状态下整个耗能体系不发挥作用,只有在地震作用下,阻尼器才通过塑性变形来消耗地震能量。然而,在小震作用下,目前设计的建筑物能够满足抗震设防要求,一般不需要阻尼器工作;在大震或偶然发生超过设防烈度的地震(因地震难以预测)作用下,需要阻尼器耗能以减小结构地震反应。这样,目前利用钢板平面外变形耗能的软钢阻尼器难以满足这种要求。为了最大程度发挥耗能体系的作用,阻尼器应该同时具备初始刚度大和屈服后具有良好变形耗能能力两个特点。针对上述阻尼器中存在的不足,本文提出了一类新型软钢阻尼器,试验和理论计算均表明,所提出的阻尼器满足这种要求。 1新型软钢阻尼器及模型试验 阻尼器钢板平面外受力时具有较强的变形能力,但初始刚度较低。为避免这一现象本文采用钢板平面内受力形式,此种受力方式同时存在一定的缺陷,通常是局部屈服更容易引发应力集中现象,变形能力较差。如何提高变形能力,避免应力集中现象则成为关键问题。通过改变钢板平面几何形状使其出现多点屈服,在屈服后形成若干塑性屈服点的方法来实现更好的
摩擦型阻尼器工作原理
随着国内外研究人员的不断研究,摩擦阻尼器的种类越来越多,不仅开发出普通摩擦阻尼器,还开发出Pall摩擦阻尼器及Sumitomo摩擦阻尼器等多种摩擦阻尼器,其工作原理是利用摩擦阻尼器进行减震的方法能够有避免对建筑物结构本身的破坏。 原理: 传统的抗震方法是通过结构本身的塑性变形来耗散地震能量,其实质就是把结构本身及构件作为“消能”元件,这样必然使结构产生不同程度的损坏,甚至产生严重的破坏和倒塌。结构控制,通过在结构上设置控制装置,由控制机构和结构一起来抵御地震等动力作用,使结构的动力反应减小。 优点: 在结构上附加耗能减震装置的减震方法是结构被动控制的一种摩擦阻尼器作为一种耗能装置,因其耗能能力强,荷载大小、频率对其性能影响不大,且构造简单,特别是在控制结构近断层地震反应和中高层结构地震反应方面有较好的优势。 对结构进行振动控制机理是:阻尼器在主要结构构件屈服前的预定荷载下产生滑移或变形,依靠摩擦或阻尼耗散地震能量,同时,由于结构变形后自振周期加长,减小了地震输入从而达到降低结构地震反应的目的。
构造: 主要包括中间钢板,两外侧钢板以及钢板之间的摩擦材料,由中间钢板与摩擦材料之间的相对滑移产生摩擦力,将建筑物的振动能量转化成热能,从而达到减轻结构振动响应的目的。 上述内容仅供参考,如有需求,可咨询专业的生产厂家:南京大德减震科技有限公司进行详细的了解,以市场为导向,提供专业的工程减隔震技术咨询、各类减隔震产品的生产、试验、销售、安装、售后服务等一体化服务,拥有专利二十余项,拥有丰富的减震产品研发制造经验,参与过奥林匹克工程多项国家重点工程方案设计、产品制造、安装、售后等工作。
二阶弹簧—阻尼系统,PID控制器设计,参数整定
*** 二阶弹簧—阻尼系统的PID控制器设计及参数整定
一、PID 控制的应用研究现状综述 PID 控制器(按闭环系统误差的比例、积分和微分进行控制的调节器)自20 世纪30 年代末期出现以来,在工业控制领域得到了很大的发展和广泛的应用。它的结构简单,参数易于调整, 在长期应用中已积累了丰富的经验。特别是在工业过程控制中, 由于被控制对象的精确的数学模型难以建立,系统的参数经常发生变化,运用控制理论分析综合不仅要耗费很大代价,而且难以得到预期的控制效果。在应用计算机实现控制的系统中,PID 很容易通过编制计算机语言实现。由于软件系统的灵活性,PID 算法可以得到修正和完善,从而使数字PID 具有很大的灵活性和适用性。 二、研究原理 比例控制器的传递函数为:G (s) K P P G (s) K PI P 1 1 T s I 积分控制器的传递函数为: 1 1 G (s) K T s PID P D T s I 微分控制器的传递函数为: 三、设计题目 设计控制器并给出每种控制器控制的仿真结果(被控对象为二阶环节,传递函数G S ,参数为M=1 kg, b=2 N.s/m, k=25 N/m, F(S)=1 );系统示意图如图 1 所示。
图1 弹簧-阻尼系统示意图弹簧-阻尼系统的微分方程和传递函数为:M x bx kx F G( s) X F ( ( s) s) Ms 1 1 2 bs k s2 s 2 25 四、设计要求 通过使用MATLAB 对二阶弹簧——阻尼系统的控制器(分别使用P、PI、PID 控制器)设计及其参数整定,定量 分析比例系数、积分时间与微分时间对系统性能的影响。同 时、掌握MATLAB 语言的基本知识进行控制系统仿真和辅 助设计,学会运用SIMULINK 对系统进行仿真,掌握PID 控制器参数的设计。 (1)控制器为P 控制器时,改变比例带或比例系数大小,分析对系统性能的影响并绘制响应曲线。 (2)控制器为PI 控制器时,改变积分时间常数大小, 分析对系统性能的影响并绘制相应曲线。(当kp=50 时,改变积分时间常数)
新型摩擦阻尼器在建筑结构抗震的应用
新型摩擦阻尼器在建筑结构抗震的应用 [摘要]提出了一种新型摩擦阻尼器,构造简单、工作机理明确,能够提供随着位移变化而变化的摩擦力,给出了连续性滞回模型描述其力学性能,进行了新型摩擦阻尼器和普通摩擦阻尼器的非线性比较和分析,结果表明:在不同地震波作用的情况下,采用本文提出的新型摩擦阻尼器对体系位移和加速度控制效果最佳。 [关键词]摩擦阻尼器;滞回模型;振动控制;抗震
传统的建筑结构抗震设计理念是通过增大结构自身的抗震性能(强度、刚度或延性)来抵御地震作用,利用结构自身储存或者耗散输入的能量,这种方法不具备自我调节与控制的能力[1]。20世纪70年代学者将振动控制理念引入土木工程领域,在结构振动控制理论、方法以及工程应用等方面均取得了大量成果,理论实践表明,结构振动控制能有效减小结构在外荷载作用下的反应和损失,是一种有效的抗震减灾技术。按照是否需要外部能量输入可以对结构振动的控制分为主动控制、被动控制、两者结合控制。主动控制通过对结构加设消能装置或者将结构构件设计为消能构件,通过消能装置和结构共同作用来吸收或者耗散输入能量,成为目前结构控制领域关注的热点。常用的耗能装置有位移型阻尼器、速度型阻尼器和混合型阻尼器。摩擦阻尼器属于位移型阻尼器,具有构造简单、耗能能力强等优点,成为建筑结构被动控制领域常用的耗能装置。近40多年来,国内外研究人员针对摩擦耗能器开展了大量研究,研发出的摩擦耗能器主要有:普通摩擦耗能器、Pall耗能器、摩擦剪切铰耗能器、EDR摩擦耗能器、多级摩擦耗能器、摩擦复合耗能器。多数摩擦耗能器是位移型消能装置,只有在外力作用超过起滑力之后才产生滑动实现耗能,在运动过程中正压力和摩擦面系数保持不变。消能效果与起滑力设定具有密切联系,起滑力过大则耗能器不产生滑动,消能为零,可能会增大结构内力;起滑力过小,可能小震或者风振作用下耗能器就起滑,虽然滑动位移较大,但耗能效果欠佳。传统摩擦消能器不能根据结构的对作用力反应,实现对结构自有特性的改变,在结构振动控制领域具有一定局限性[2]。早在1990年Kobri便提出了结构半主动变刚度控制方法[3];2006年我国学者赵东等提出了一种可控变力单向摩擦阻尼器,利用振源位移反馈信号进行主动控制[4];2010年,王茜茜等提出了一种具有简单控制律的Off-On
赛弗粘滞阻尼器技术手册
赛弗 粘滞阻尼器 技术手册赛弗
CONTENT目录 P2 - P4 P5 - P6 P7 P8 - P9 P10 - P17上海赛弗工程减震技术有限公司 1. SF-VFD产品简介 …………… 产品构造及原理 技术参数 产品特点 SF-VFD 2. SF-VFD产品应用策略……… SF-VFD产品应用领域 国外案例 3. SF-VFD产品试验…………… 4. 工程案例 ……………………… 5. SF-VFD黏滞阻尼器参数表…
SF-VFD 支撑式黏滞阻尼器构造如右图所示,主要由高硬度缸筒、高精度活塞、活塞杆、特殊填充材料、关节耳环及大量高性能配件组成,当缸内的活塞进行往复运动时,填充材料从阻尼孔中高速流过从而产生剪切阻抗力。 SF-VFD 黏滞阻尼器阻尼力的大小与活塞运动速度非线性相关,可用下式表达: 1 SF-VFD 产品简介 1.1产品构造及原理 F=Csign(v)|v| α 1.2 技术参数 式中: C — 阻尼系数; v — 活塞与缸筒的相对运动速度; α — 速度指数,根据工程需求选取,选取范围为0.2~1.0。 (α为SF-VFD 的主要性能指标参数) 1)良好的耗能能力 试验表明,在简谐荷载作用下,黏滞阻尼器力-位移曲线如图1.2所示,阻尼器具有良好的耗能能力,且速度指数α越小,滞回曲线越饱满。 1.3 产品特点 图1.1 黏滞阻尼器构造 (a)斜撑型 (b)剪切连接型 (c)支撑型 图1.2 黏滞阻尼器滞回曲线图1.3 拟加速度反应谱图 1.4 拟速度反应谱 2)控制结构在地震中的振动响应 黏滞阻尼器应用于建筑中可改善结构阻尼特性,对结构在地震作用下的振动响应进行控制,有效降低结构层剪力及层间位移。 3)布置灵活安装方式多样性 根据结构特点及建筑需求可灵活布置黏滞阻尼器,同时提供多种阻尼器安装方式,如斜撑型、剪切连接型、墙 型、肘节型等,其中前三种安装方式较为常用。 4)小震作用下即可进入耗能 黏滞阻尼器滞回曲线由于不存在弹性段,因此在外部振动能量输入时能够即时的进入耗能状态。 黏滞阻尼器滞回曲线 SF-VFD
二阶弹簧—阻尼系统PID控制器设计参数整定
二阶弹簧—阻尼系统P I D控制器设计参数整 定 内部编号:(YUUT-TBBY-MMUT-URRUY-UOOY-DBUYI-0128)
二阶弹簧—阻尼系统的PID控制器设计及参数整定 一、PID控制的应用研究现状综述 PID控制器(按闭环系统误差的比例、积分和微分进行控制的调节器)自20世纪30年代末期出现以来,在工业控制领域得到了很大的发展和广泛的应用。它的结构简单,参数易于调整,在长期应用中已积累了丰富的经验。特别是在工业过程控制中,由于被控制对象的精确的数学模型难以建立,系统的参数经常发生变化,运用控制理论分析综合不仅要耗费很大代价,而且难以得到预期的控制效果。在应用计算机实现控制的系统中,PID很容易通过编制计算机语言实现。由于软件系统的灵活性,PID算法可以得到修正和完善,从而使数字PID具有很大的灵活性和适用性。 二、研究原理 比例控制器的传递函数为: () P P G s K = 积分控制器的传递函数为: 11 () PI P I G s K T s =+? 微分控制器的传递函数为: 11 () PID P D I G s K T s T s =+?+? 三、设计题目 设计控制器并给出每种控制器控制的仿真结果(被控对象为二阶环节,传递函数() G S,参数为M=1 kg, b=2 N.s/m, k=25 N/m, F(S)=1);系统示意图如图1所示。 图1 弹簧-阻尼系统示意图 弹簧-阻尼系统的微分方程和传递函数为: 四、设计要求
通过使用MATLAB 对二阶弹簧——阻尼系统的控制器(分别使用P 、PI 、PID 控制器)设计及其参数整定,定量分析比例系数、积分时间与微分时间对系统性能的影响。同时、掌握MATLAB 语言的基本知识进行控制系统仿真和辅助设计,学会运用SIMULINK 对系统进行仿真,掌握PID 控制器参数的设计。 (1)控制器为P 控制器时,改变比例带或比例系数大小,分析对系统性能的影响并绘制响应曲线。 (2)控制器为PI 控制器时,改变积分时间常数大小,分析对系统性能的影响并绘制相应曲线。(当kp=50时,改变积分时间常数) (3)设计PID 控制器,选定合适的控制器参数,使阶跃响应曲线的超调量%20%σ<,过渡过程时间2s t s <,并绘制相应曲线。 图2 闭环控制系统结构图 五、设计内容 (1)P 控制器:P 控制器的传递函数为: ()P P G s K =(分别取比例系数K 等于 1、10、30和50,得图所示) Scope 输出波形: 仿真结果表明:随着Kp 值的增大,系统响应超调量加大,动作灵敏,系统的响应速度加快。Kp 偏大,则振荡次数加多,调节时间加长。随着Kp 增大,系统的稳态误差减小,调节应精度越高,但是系统容易产生超调,并且加大Kp 只能减小稳态误差,却不能消除稳态误差。 (2)PI 控制器:PI 控制器的传递函数为: 11()PI P I G s K T s =+? (K=50, 分别取积分时间Ti 等于10、1和0.1得图所示) Scope 输出波形:
外置阻尼器设计说明
重庆地维长江大桥斜拉索外置式杆式黏滞阻尼器设计说明 一、工程概况 地维长江大桥位于重庆市西郊大渡口区跳蹬镇白沙沱与江津市珞磺镇之间,大桥结构形式为双塔双索面预应力混凝土梁斜拉桥,全长734.8米,总宽15米,双车道,设计车行时速40公里。跨径布置为141米+345米+141米,倒Y型索塔高148.89m,钢绞线斜拉索。 大桥设计为双向两车道,桥面宽15米,全长737米,设计载荷等级为汽车-20级、挂车-120级。双塔各高130.89米,呈花瓶形,全桥设168根斜拉索和4根0号索。 二、编制依据 《斜拉索外置式黏滞阻尼器》J T/T1038-2016 三、斜拉索外置式杆式黏滞阻尼器设计 为减小斜拉索颤振频率,在梁端斜拉索设置外置杆式黏滞阻尼器,设置在编号为n10~n21、n10’~n21’号长索上,共计96套。对斜拉索预埋管采用发泡填充材料、聚硫密封材料进行密封处置。为防止行人割伤索皮,斜拉索梁端安装离桥面2.5m高度的不锈钢护管,平均长度3.5m计,全桥共计172根不锈钢护管。 黏滞阻尼器参数选择最大位移±50m m,设计能承受的最大阻尼力20k N;黏滞阻尼器性能符合力-速度曲线关系式F=C Vα,其中阻尼系数C=37.0K N/(m/s)α;阻尼指数α=0.33。 斜拉索外置式杆式黏滞阻尼器主要由黏滞阻尼器、索夹连接件、底座以及销轴、紧固件组成。索夹连接件采用Q235B钢材,索夹内表面粘贴优质三元乙丙橡胶垫。销轴材料采用2C r13不锈钢。向心关节轴承、孔用弹性挡圈材料采用304不锈钢。黏滞阻尼器缸体、端盖、活塞材料采用45#优质碳素结构钢;活塞杆材料采用40C r合金结构钢。底座采用Q235B结构钢。斜拉索外置式杆式黏滞阻尼器成品防腐涂装外表面涂层配套体系参照J T/T722-2008,总干膜厚度≥240μm。 目标振幅是指斜拉索安装外置式阻尼器后,斜拉索容许产生的最大振幅。本项目n10~n21、n10’~n21’号斜拉索均属短索(索长小于250米),按《斜拉索外置式黏滞阻尼器》J T/T1038-2016规定,安装斜拉索外置式阻尼器后其目标振幅按L/1000计算,目标振幅如下表3-1、3-2所示。
控制系统仿真与CAD课程设计(二阶弹簧—阻尼系统的PID控制器设计及其参数整定)
设计一:二阶弹簧—阻尼系统的PID 控制器 设计及其参数整定 一设计题目 考虑弹簧-阻尼系统如图1所示,其被控对象为二阶环节,传递函数G(S)如下,参数为M=1kg ,b=2N.s/m ,k=25N/m ,F (S )=1。 图1 弹簧-阻尼系统示意图 弹簧-阻尼系统的微分方程和传递函数为: F kx x b x M =++ 25211) ()()(2 2 ++= ++= = s s k bs Ms s F s X s G 二设计要求 1. 控制器为P 控制器时,改变比例系数大小,分析其对系统性能的影响并绘制相应曲线。 2. 控制器为PI 控制器时,改变积分时间常数大小,分析其对系统性能的影响并绘制相应曲线。(例如当kp=50时,改变积分时间常数) 3. 设计PID 控制器,选定合适的控制器参数,使闭环系统阶跃响应曲线的超调量σ%<20%,过渡过程时间Ts<2s, 并绘制相应曲线。
图2 闭环控制系统结构图 三设计内容 1. 控制器为P 控制器时,改变比例系数p k 大小 P 控制器的传递函数为:()P P G s K ,改变比例系数p k 大小,得到系统的阶跃响应曲线 00.2 0.4 0.6 0.8 1 1.2 1.4 Step Response Time (sec) A m p l i t u d e 仿真结果表明:随着Kp 值的增大,系统响应超调量加大,动作灵敏,系统的响应速度加快。Kp 偏大,则振荡次数加多,调节时间加长。随着Kp 增大,系统的稳态误差减小,调节应精度越高,但是系统容易产生超调,并且加大Kp 只能减小稳态误差,却不能消除稳态误差。 程序: num=[1]; den=[1 2 25]; sys=tf(num,den); for Kp=[1,10:20:50]
减震器设计
4.7减振器机构类型及主要参数的选择计算 4.7.1分类 悬架中用得最多的减振器是内部充有液体的液力式减振器。汽车车身和车轮振动时,减振器内的液体在流经阻尼孔时的摩擦和液体的粘性摩擦形成了振动阻力,将振动能量转变为热能,并散发到周围空气中去,达到迅速衰减振动的目的。如果能量的耗散仅仅是在压缩行程或者是在伸张行程进行,则把这种减振器称之为单向作用式减振器,反之称之为双向作用式减振器。后者因减振作用比前者好而得到广泛应用。 根据结构形式不同,减振器分为摇臂式和筒式两种。虽然摇臂式减振器能够在比较大的工作压力(10—20MPa)条件下工作,但由于它的工作特性受活塞磨损和工作温度变化的影响大而遭淘汰。筒式减振器工作压力虽然仅为2.5~5MPa ,但是因为工作性能稳定而在现代汽车上得到广泛应用。筒式减振器又分为单筒式、双筒式和充气筒式三种。双筒充气液力减振器具有工作性能稳定、干摩擦阻力小、噪声低、总长度短等优点,在轿车上得到越来越多的应用。 设计减振器时应当满足的基本要求是,在使用期间保证汽车行驶平顺性的性能稳定。 4.7.2相对阻尼系数ψ 减振器在卸荷阀打开前,减振器中的阻力F 与减振器振动速度v 之间有如下关系 v F δ= (4-51) 式中,δ为减振器阻尼系数。 图4—37b 示出减振器的阻力-速度特性图。该图具有如下特点:阻力-速度特性由四段近似直线线段组成,其中压缩行程和伸张行程的阻力-速度特性各占两段;各段特性线的斜率是减振器的阻尼系数v F /=δ,所以减振器有四个阻尼系数。在没有特别指明时,减振器的阻尼系数是指卸荷阀开启前的阻尼系数而言。通常压缩行程的阻尼系数Y Y Y v F /=δ与伸张行程的阻尼系数S S S v F /=δ不等。 图4—37 减振器的特性 a) 阻力一位移特性 b)阻力一速度特性 汽车悬架有阻尼以后,簧上质量的振动是周期衰减振动,用相对阻尼系数ψ的大小来评定振动衰减的快慢程度。ψ的表达式为 s cm 2δ ψ= (4-52)