51单片机实现双机通信(自己整理的)
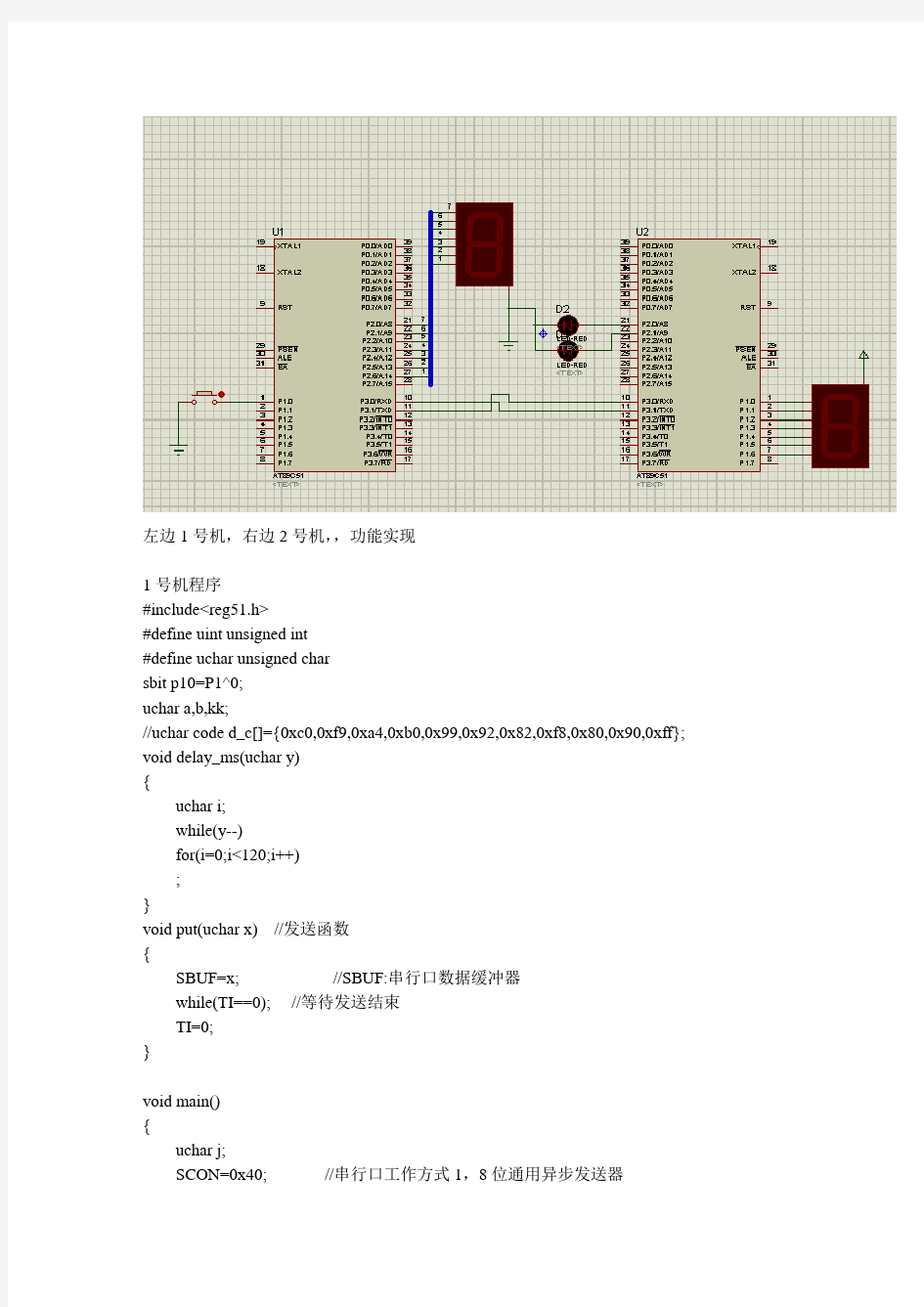
左边1号机,右边2号机,,功能实现
1号机程序
#include
#define uint unsigned int
#define uchar unsigned char
sbit p10=P1^0;
uchar a,b,kk;
//uchar code d_c[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff}; void delay_ms(uchar y)
{
uchar i;
while(y--)
for(i=0;i<120;i++)
;
}
void put(uchar x) //发送函数
{
SBUF=x; //SBUF:串行口数据缓冲器
while(TI==0); //等待发送结束
TI=0;
}
void main()
{
uchar j;
SCON=0x40; //串行口工作方式1,8位通用异步发送器
—
TMOD=0x20; //定时器1工作方式2
PCON=0x00; //波特率不倍增
TH1=0xf4;
TL1=0xf4; //波特率2400
TR1=1; //定时器1开始计时
P2=0xc0;
while(1)
{
if(p10==0&&j==0)
{
delay_ms(15);
while(p10==0);
kk=1;
P2=0xf9;
j=1;
}
if(p10==0&&j==1)
{
delay_ms(15);
while(p10==0);
kk=2;
P2=0xa4;
j=2;
}
if(p10==0&&j==2)
{
delay_ms(15);
while(p10==0);
kk=3;
P2=0xb0;
j=0;
}
if(kk==1)
put('A');
if(kk==2)
put('B');
if(kk==3)
put('C');
delay_ms(10);
}
}
—
/*
********************************************************************** if(p10==0&&j==0)
{
delay_ms(15);
while(p10==0);
kk=0;
P2=~0xf9;
j=1;
}
if(p10==0&&j==1)
{
delay_ms(15);
while(p10==0);
kk=1;
P2=~0xa4;
j=2;
}
if(p10==0&&j==2)
{
delay_ms(15);
while(p10==0);
kk=2;
P2=~0xc0;
j=0;
}
if(kk==0)
put('A');
if(kk==1)
put('B');
if(kk==2)
put('C');
delay_ms(100);
***********************************************************
if(p10==0)
{
delay_ms(15);
while(p10==0);
number=(number+1)%4;
}
—
switch(oper)
{
case 0:break;
case 1:put('A');P2=~0xf9;break;
case 2:put('B');P2=~0xa4;break;
case 3:put('C');P2=~0xc0;break;
}
delay_ms(10);
********************************************************************
if(p10==0)
{
delay_ms(15);
while(p10==0);
j=(j+1)%3;
}
switch(j)
{
case 0:put('A');P2=~0xf9;break;
case 1:put('B');P2=~0xa4;break;
case 2:put('C');P2=~0xc0;break;
}
delay_ms(10);
*/
2号机程序。
#include
#define uint unsigned int
#define uchar unsigned char
sbit L1=P2^0;
sbit L2=P2^1;
//uchar code d_c[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff};
void delay_ms(int x)
{
uchar i;
while(x--)
for(i=0;i<120;i++)
;
}
—
void main()
{
SCON=0x50; //串行口工作方式1,8位通用异步发送器
TMOD=0x20; //定时器1工作方式2
PCON=0x00; //波特率不倍增
TH1=0xf4;
TL1=0xf4;
TR1=1;
P1=0xc0;
L1=L2=0;
while(1)
{
if(RI)
{
RI=0;
switch(SBUF)
{
case'A':L1=~L1;L2=0;P1=0xf9;break;
case'B':L1=~L1;L2=~L2;P1=0xa4;break;
case'C':L1=0;L2=0;P1=0xb0;break;
}
}
delay_ms(100);
}
}
/*********************************************************
if(RI)
{
RI=0;
if(SBUF=='A')
{L1=~L1;P1=0xf9;}
if(SBUF=='B')
{L1=~L1;L2=~L2;P1=0xa4;}
if(SBUF=='C')
{L1=0;L2=0;P1=0xc0;}
}
**********************************************************/