5轴数控机床坐标系统的一个特例及其后置处理方法_刘日良
5轴数控机床坐标系统的一个特例及其后置处理方法
刘日良,张承瑞,宋现春,刘战强,艾 兴
(山东大学机械工程学院,山东济南 250061)
摘要:介绍了一个包含倾斜转动轴的5轴数控机床坐标系统及其在该转动轴与主轴成45°角情况下的运动特点。通过对该系统中机床运动坐标系与工件坐标系关系的分析,给出了5轴联动时刀轨数据的后置处理方法,包括工作台转角的计算和主轴运动坐标计算。关键词:CNC ;5轴联动;后处理
中图分类号:TG 659;TP311 文献标识码:A 文章编号:1007-9483(2002)03-0061-02
A Five -Axis CNC Machine Coordinate System and its Post Processing Method
L IU Ri -liang ,ZHAN G Cheng -rui ,SON G Xian -chun ,L IU Zhang -qiang ,AI Xing
(Shandong University ,Shandong Ji ’nan ,250061,China )
Abstract :The coordinate system of a 5-axis CNC machine ,which includes an oblique rotary axis ,as well as its characteristics provided the rotary axis is fixed at angle of 45°to the spindle ,is introduced in this paper.The corresponding post processing method of cutter location data including the rotary angle of the table and the motion coordinates of the spindle is presented after an 2alyzing relations between the workpiece coordinate system and the 5-axis machine coordinate system.K ey w ords :CNC ;5-axis Linkage ;Post Processing
根据ISO 的规定,数控机床采用右手直角坐标系(如图1所示),其中平行于主轴的坐标轴定义为z 轴,绕x ,y ,z 轴的旋转坐标分别为A ,B ,C 。通常所谓的5轴联动是指图1中x ,y ,z ,A ,B ,C 中任意5个坐标的线性插补运动[1]。上述各坐标轴的运动可由工作台也可以由刀具的运动来实现,但方向均以刀具相对于工件的运动方向定义。为了避图1一般数控机床的坐标系免复杂的坐标转换,在机床的设计中一般使实际运动轴与图1中各轴平行,但随着CNC 技术的发展以及机床设计的实际需要,运动轴的方式
呈现出多样化趋势[2,3]。笔者将介绍的机床坐标系就是出于设计的需要在图1所示坐标系基础上稍作改动后得到的,其效果已经德国DM G 公司的DM70V 数控加工中心证明,同时笔者还将给出其5轴联动加工时的后置处理方法。
1 机床的运动坐标
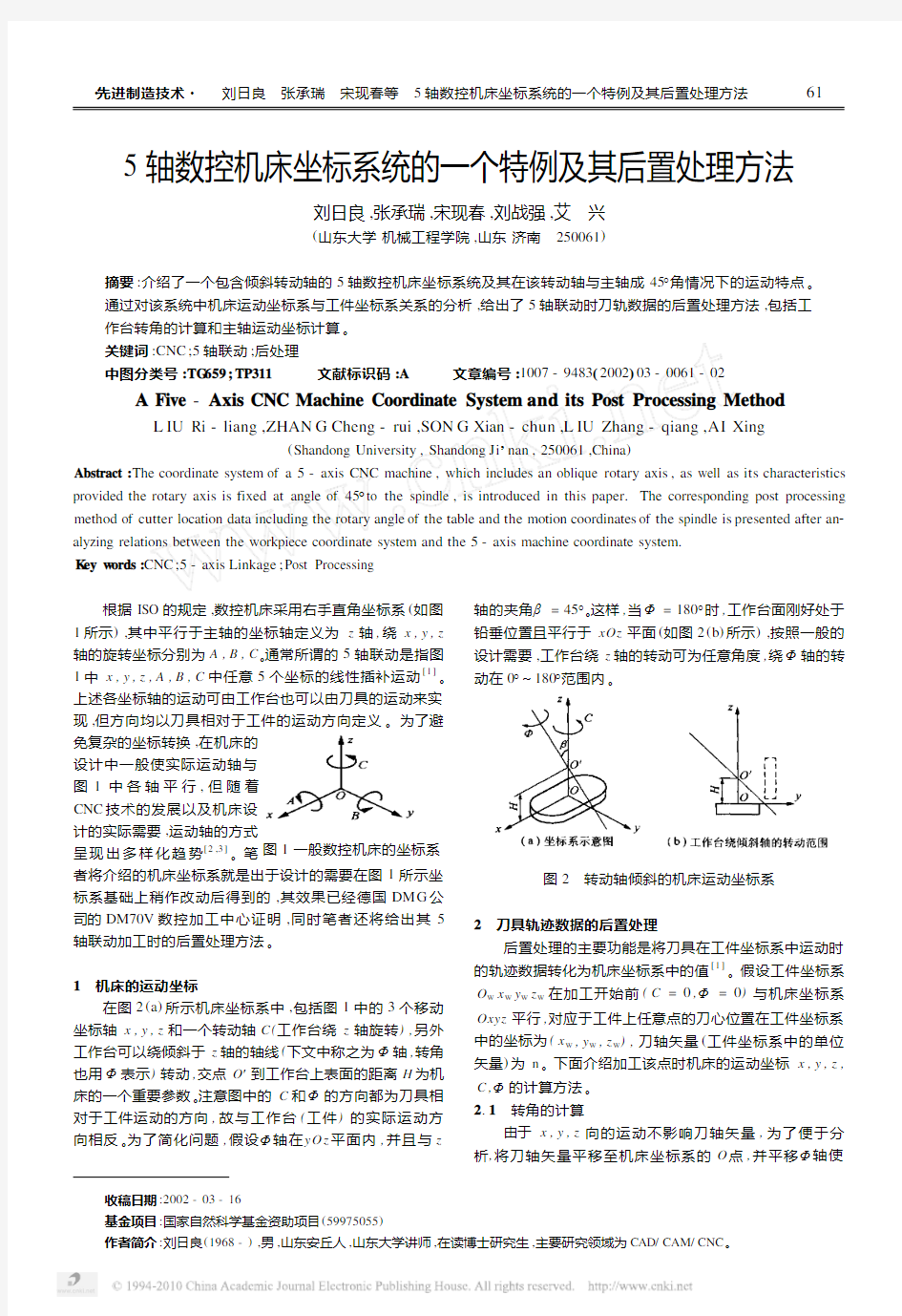
在图2(a )所示机床坐标系中,包括图1中的3个移动
坐标轴x ,y ,z 和一个转动轴C (工作台绕z 轴旋转),另外工作台可以绕倾斜于z 轴的轴线(下文中称之为Φ轴,转角也用Φ表示)转动,交点O ′到工作台上表面的距离H 为机床的一个重要参数。注意图中的C 和Φ的方向都为刀具相对于工件运动的方向,故与工作台(工件)的实际运动方向相反。为了简化问题,假设Φ轴在y O z 平面内,并且与z
轴的夹角β=45°。这样,当Φ=180°时,工作台面刚好处于铅垂位置且平行于xOz 平面(如图2(b )所示),按照一般的设计需要,工作台绕z 轴的转动可为任意角度,绕Φ轴的转动在0°~180°范围内
。
图2 转动轴倾斜的机床运动坐标系
2 刀具轨迹数据的后置处理
后置处理的主要功能是将刀具在工件坐标系中运动时的轨迹数据转化为机床坐标系中的值[1]。假设工件坐标系O w x w y w z w 在加工开始前(C =0,Φ=0)与机床坐标系
Oxyz 平行,对应于工件上任意点的刀心位置在工件坐标系
中的坐标为(x w ,y w ,z w ),刀轴矢量(工件坐标系中的单位
矢量)为n 。下面介绍加工该点时机床的运动坐标x ,y ,z ,
C ,Φ的计算方法。
211 转角的计算
由于x ,y ,z 向的运动不影响刀轴矢量,为了便于分析,将刀轴矢量平移至机床坐标系的O 点,并平移Φ轴使
收稿日期:2002-03-16
基金项目:国家自然科学基金资助项目(59975055)
作者简介:刘日良(1968-),男,山东安丘人,山东大学讲师,在读博士研究生,主要研究领域为CAD/CAM/CNC 。
1
6?先进制造技术? 刘日良 张承瑞 宋现春等 5轴数控机床坐标系统的一个特例及其后置处理方法
之过O 点,如图3所示。设工件坐标系中的单位矢量n 0=
ON 0=k ,那么当工作台绕Φ轴旋转角度φ(0°≤
φ=-Φ≤180°
)时,n 0端点的运动轨迹为半圆弧;当工作台再绕z 轴逆时针回转(-C )时,则形成一个水平的圆弧。所以对于
任意给定的刀轴矢量n =a x i +a y j +a z k (其中a z ≥0),只要先使其端点N 绕z 轴顺时针方向旋转角度C 至图中的M 点,然后再绕Φ轴转动角度Φ至N 0点,便能保证刀轴矢量与z 轴重合
。
图3 转动角度的计算
根据图3中所示的几何关系,显然有
OM =O G +GM =
1
2
(-j +k )+22[2
2
cos φ(j +k )+sin φi ](1)
OM =O E +EM =a z k +
a 2
x +a 2
y (cos C ′i +sin C ′j )
(2)
由式(1)、式(2)可得
cos φ=2a z -1(3)sin C ′=
1-a z a 2
x +a 2
y
(4)
同时根据图3还可以得到
cos C ″=
a x a 2
x +a 2
y
(5)
所以,机床的运动坐标为
Φ=arccos (2a z -1)
(6)
C =
arcsin (
1-a z a 2
x +a 2
y
)+arccos (a x a 2
x +a 2
y ) (a y ≥0)arcsin (
1-a z a 2
x +a 2
y
)-arccos (
a x a 2
x +a 2
y
) (a y <0)
(7)
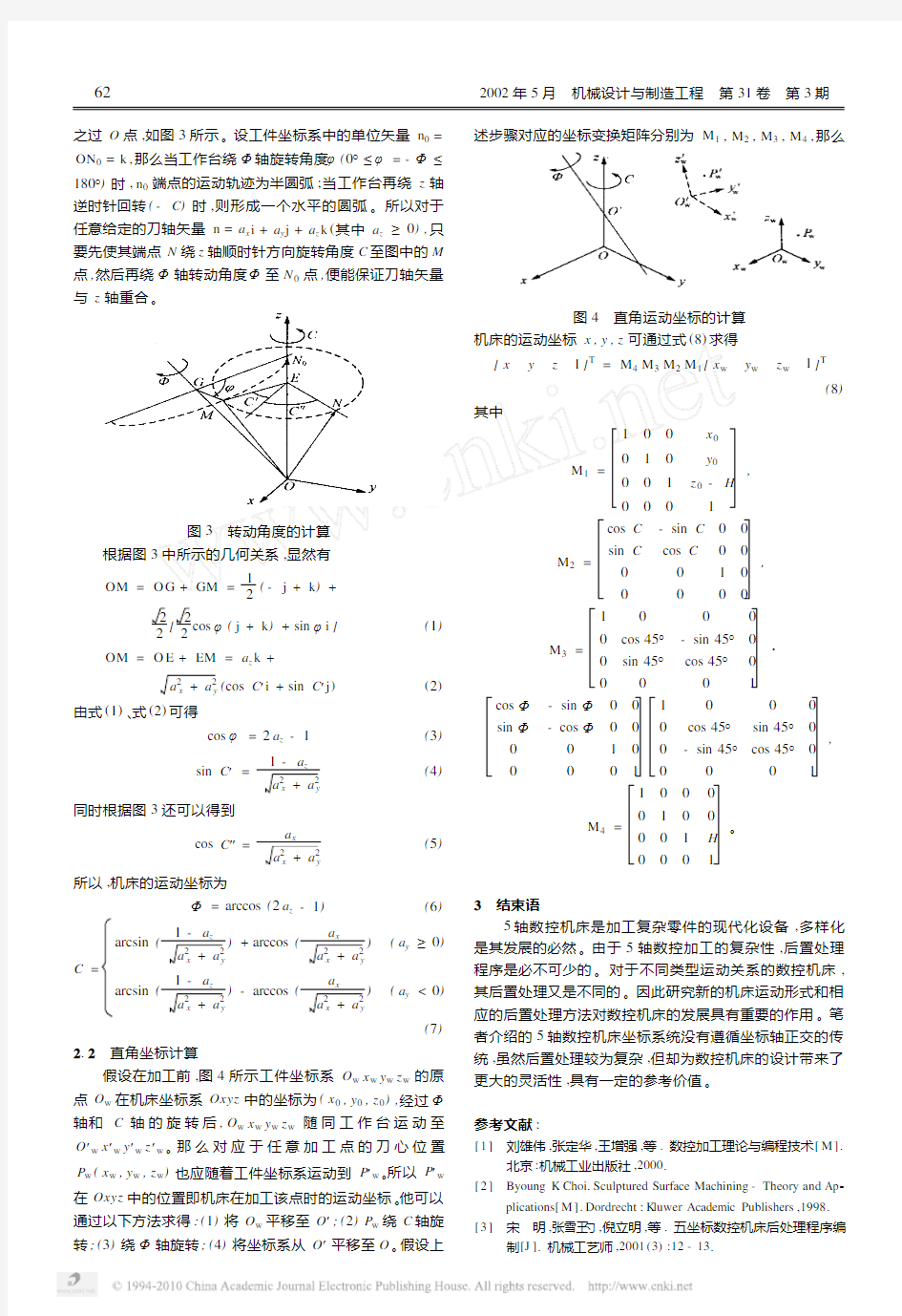
212 直角坐标计算
假设在加工前,图4所示工件坐标系O w x w y w z w 的原点O w 在机床坐标系Oxyz 中的坐标为(x 0,y 0,z 0),经过Φ轴和C 轴的旋转后,O w x w y w z w 随同工作台运动至
O ′w x ′w y ′w z ′w 。那么对应于任意加工点的刀心位置P
w (x w ,y w ,z w )也应随着工件坐标系运动到P ′w 。所以P ′w
在Oxyz 中的位置即机床在加工该点时的运动坐标。他可以通过以下方法求得:(1)将O w 平移至O ′;(2)P w 绕C 轴旋转;(3)绕Φ轴旋转;(4)将坐标系从O ′平移至O 。
假设上述步骤对应的坐标变换矩阵分别为M 1,M 2,M 3,M 4,那么
图4 直角运动坐标的计算
机床的运动坐标x ,y ,z 可通过式(8)求得
[x y z 1]
T
=M 4M 3M 2M 1[x w y w z w 1]
T
(8)
其中
M 1=
1
0x 0010y 0001z 0-H
00
01,
M 2
=
cos C
-sin C
00sin C cos C 00001000
00,
M 3=
1
00cos 45°-sin 45°00sin 45°cos 45°0
0001
?
cos Φ
-sin Φ00sin Φ-cos Φ0000100
110
000cos 45°sin 45°00-sin 45°cos 45°0
0001
,
M 4=
10000100001H
01
。
3 结束语
5轴数控机床是加工复杂零件的现代化设备,多样化
是其发展的必然。由于5轴数控加工的复杂性,后置处理
程序是必不可少的。对于不同类型运动关系的数控机床,其后置处理又是不同的。因此研究新的机床运动形式和相应的后置处理方法对数控机床的发展具有重要的作用。笔者介绍的5轴数控机床坐标系统没有遵循坐标轴正交的传统,虽然后置处理较为复杂,但却为数控机床的设计带来了更大的灵活性,具有一定的参考价值。参考文献:
[1] 刘雄伟,张定华,王增强,等1数控加工理论与编程技术[M ]1
北京:机械工业出版社,20001
[2] Byoung K Choi.Sculptured Surface Machining -Theory and Ap 2
plications[M ].Dordrecht :K luwer Academic Publishers ,19981[3] 宋 明,张雪王勺,倪立明,等1五坐标数控机床后处理程序编
制[J ]1机械工艺师,2001(3):12-131
2
62002年5月 机械设计与制造工程 第31卷 第3期
数控机床控制系统
习题1-2 数控机床控制系统 一. 判断下列说法的对错,并将错的地方改正。 1. ( )主轴(spindle )转速控制,刀具(tool )自动交换控制属于数控系统的辅助功能。 2. ( )数控系统的主要功能是控制运动坐标的位移及速度。 3. ( )轮廓控制数控系统控制的轨迹一般为与某一坐标轴(axis)相平行的直线。 4. ( )直线控制数控系统可控制任意斜率的直线轨迹。 5. ( )开环控制数控系统无反馈(feedback )回路。 6. ( )配置SINUMERIK 802S 数控系统的数控机床采用步进电动机作为驱动元件。 7. ( )闭环控制数控系统的控制精度(accuracy)高于开环控制数控系统的控制精度。 8. ( )全闭环控制数控系统不仅具有稳定的控制特性,而且控制精度高。 9. ( )半闭环控制数控机床安装有直线位移检测装置。 10. ( )机床工作台(table )的移动是由数控装置发出位置控制命令和速度控制命令而实现的。 11. ( )刀具(tool )按程序正确移动是按照数控装置发出的开关命令实现的。 12. ( )机床主轴(spindle )的起动与停止是根据CNC 发出的开关命令,由PLC 完成 的。 13. ( )CNC 中位置调节器是用模拟调节器。 14. ( )在双环进给轴控制器中,转速调节器的输入是位置调节器的输出。 15. ( )穿孔纸带(tape )是控制介质的一种。 16. ( )软盘属于输出装置。 17. ( )M 功能指令被传送至PLC-CPU ,用PLC 程序来实现M 功能。 图1-2-1 数控机床控制方式
18.()数控加工程序中有关机床电器的逻辑控制及其他一些开关信号的处理是用PLC 控制程序来实现的,一般用C语言编写。 19. ()HAAS立式加工中心的自动换刀动作是这样完成的:换刀指令经CNC-CPU译码后,由轴控制器(axis controller)控制完成。 20. ()HAAS立式加工中心(vertical machining center)共有三个坐标轴,其控制主要由PLC完成。 21. ()CNC machines generally read and execute the program directly from punched tapes. 22. ()CNC对加工程序解释时,将其区分成几何的、工艺的数据和开关功能。刀具(tool)的选择和交换即属于开关功能。 23. ()位置调节器的命令值就是插补器发出的运动序列信号。 24. ()目前的闭环伺服系统都能达到0.001μm的分辨率。 25. ()经济型数控机床一般采用半闭环系统。 26. ()数控机床一般采用PLC作为辅助控制装置。 27. ()半闭环和全闭环位置反馈系统的根本差别在于位置传感器安装的位置不同,半闭环的位置传感器安装在工作台上,全闭环的位置传感器安装在电机的轴上。 28.()只有半闭环系统需要进行螺距误差补偿,而全闭环系统则不需要。 29.()数控机床的数控系统主要由计算机数控装置和伺服系统等部分组成。 二. 填充,以完成下列各表述。 1.只有在位置偏差(跟随误差)为时,工作台才停止在要求的位置上。 2.半闭环控制中,CNC精确控制电动机的旋转角度,然后通过传动 机构,将角度转换成工作台的直线位移。 3.开环伺服系统主要特征是系统内没有装置,通常使用为伺服执行机构。 4.辅助控制装置的主要作用是接受数控装置输出的指令信号,主要控制装置是。 5.数控机床控制系统包括了、、、、、。 6. 进给伺服系统是以为控制量的自动控制系统,它根据数控装置插补运算生成的,精确地变换为机床移动部件的位移,直接反映了机床坐标轴跟踪运动指令和实际定位的性能。 7. 闭环和半闭环控制是基于原理工作的。 8. 数控机床的基本组成包括、、、、、以及机床本体。 图1-2-2 HAAS立式加工中心
简介五轴联动数控机床
五轴联动数控机床是一种科技含量高、精密度高专门用于加工复杂曲面的机床,这种机床系统对一个国家的航空、航天、军事、科研、精密器械、高精医疗设备等等行业有着举足轻重的影响力。 简介 装备制造业是一国工业之基石,它为新技术、新产品的开发和现代工业生产提供重要的手段,是不可或缺的战略性产业。即使是发达工业化国家,也无不高度重视。近年来,随着我国国民经济迅速发展和国防建设的 需要,对高档的数控机床提出了迫切的大量需求。机床是一个国家制造业水平的象征。而代表机床制造业最高境界的是五轴联动数控机床系统,从某种意义上说,它反映了一个国家的工业发展水平状况。长期以来,以美国为首的西方工业发达国家,一直把五轴联动数控机床系统作为重要的战略物资,实行出口许可证制度。特别是冷战时期,对中国、前苏联等社会主义阵营实行封锁禁运。爱好军事的朋友可能知道著名的“东芝事件”:上世纪末,日本东芝公司卖给前苏联几台五轴联动的数控铣床,结果让前苏联用于制造潜艇的推进螺旋桨,上了几个档次,使美国间谍船的声纳监听不到潜艇的声音了,所以美国以东芝公司违反了战略物资禁运政策,要惩处东芝公司。 五轴机床的种类 有摇篮式、立式、卧式、NC工作台+NC分度头、NC工作台+90°B轴、NC工作台+45°B 轴、NC工作台+ A轴°、二轴NC 主轴等。 A轴和C轴最小分度值一般为0.001度,这样又可以把工件细分成任意角度,加工出倾斜面、倾斜孔等。A轴和C轴如与XYZ三直线轴实现联动,就可加工出复杂的空间曲面,当然这需要高档的数控系统、伺服系统以及软件的支持。这种设置方式的优点是主轴的结构比较简单,主轴刚性非常好,制造成本比较低。但一般工作台不能设计太大,承重也较小,特别是当A轴回转大于等于90度时,工件切削时会对工作台带来很大的承载力矩。另一种是依靠立式主轴头的回转。主轴前端是一个回转头,能自行环绕Z轴360度,成为C轴,回转头上还有带可环绕X轴旋转的A轴,一般可达±90度以上,实现上述同样的功能。这种设置方式的优点是主轴加工非常灵活,工作台也可以设计的非常大,客机庞大的机身、巨大的发动机壳都可以在这类加工中心上加工。这种设计还有一大优点:我们在使用球面铣刀加工曲面时,当刀具中心线垂直于加工面时,由于球面铣刀的顶点线速度为零,顶点切出的工件表面质量会很差,采用主轴回转的设计,令主轴相对工件转过一个角度,使球面铣刀避开顶点切削,保证有一定的线速度,可提高表面加工质量。这种结构非常受模具高精度曲面加工的欢迎,这是工作台回转式加工中心难以做到的。为了达到回转的高精度,高档的回转轴还配置了圆光栅尺反馈,分度精度都在几秒以内,当然这类主轴的回转结构比较复杂,制造成本也较高。 国外五轴联动数控机床是为适应多面体和曲面零件加工而出现的。随着机床复合化技术的新发展,在数控车床的基础上,又很快生产出了能进行铣削加工的车铣中心。五轴联动数控机床的加工效率相当于两台三轴机床,有时甚至可以完全省去某些大型自动化生产线的投资,大大节约了占地空间和工作在不同制造单元之间的周转运输时间及费用。市场的需求推动了我国五轴联动数控机床的发展,CIMT99 展览会上国产五轴联动数控机床第一次登上机床市场的舞台。自江苏多棱数控机床股份有限公司展出第一台五轴联动龙门加工中心以来,北京机电研究院、北京第一机床厂、桂林机床股份有限公司、济南二机床集团有限公司等企业也相继开发出五轴联动数控机床。 当前,国产五轴联动数控机床在品种上已经拥有立式、卧式、龙门式和落地式的加工中心,适应不同大小尺寸的杂零件加工,加上五轴联动铣床和大型镗铣床以及车铣中心等的开发,基本涵盖了国内市场的需求。精度上,北京机床研究所的高精度加工中心、宁江机械集
数控机床的坐标系
数控机床的坐标系
2.1 数控机床的坐标系 在编写数控加工程序过程中,为了确定刀具与工件的相对位置,必须通过机床参考点和坐标系描述刀具的运动轨迹。在国际ISO标准中,数控机床坐标轴和运动方向的设定均已标准化,我国机械工业部1982年颁布的 JB3052-82标准与国际ISO标准等效。 2.1.1 坐标系及运动方向 1. 坐标系的确定原则 1)刀具相对于静止工件而运动的原则这个原则规定不论数控机床是刀具运动还是工件运动,编程时均以刀具的运动轨迹来编写程序,这样可按零件图的加工轮廓直接确定数控机床的加工过程。 2)标准坐标系的规定标准坐标系是一个直角坐标系,如图2-1-1(a)所示,按右手直角坐标系规定,右手的拇指、食指和中指分别代表X、Y、Z三根直角坐标轴的方向;如图2-1-1(b)所示,旋转方向按右手螺旋法则规定,四指顺着轴的旋转方向,拇指与坐标轴同方向为轴的正旋转,反之为轴的反旋转,图中A、B、C 分别代表围绕X、Y、Z三根坐标轴的旋转方向。
图2-1-1 右手直角坐标系 3)坐标轴正负的规定使刀具与工件之间距离增大的方向规定为轴的正方向,反之为轴的反方向。 2. 机床坐标轴的确定方法 Z轴表示传递切削动力的主轴,X轴平行于工件的装夹平面,一般取水平位置,根据右手直角坐标系的规定,确定了X和Z坐标轴的方向,自然能确定Y轴的方向。 1)车床坐标系 如图2-1-2所示,Z坐标轴与车床的主轴同轴线,刀具横向运动方向为X坐标轴的方向,旋转方向C表示主轴的正转。 图2-1-2车床坐标系 2)立式铣床坐标系
坐标轴反方向运动的极限位置的交点,即在此状态下的工作台左前角上。 图2-1-5 数控车床坐标系的原点2)工件坐标系设定工件坐标系XpYpZp 目的是为了编程方便。设置工件坐标系原点的原则尽可能选择在工件的设计基准和工艺基准上,工件坐标系的坐标轴方向与机床坐标系的坐标轴方向保持一致。在数控车床中,如图 2-1-6所示,原点Op点一般设定在工件的右端面与主轴轴线的交点上。在数控铣床中,如图2-1-7所示,Z轴的原点一般设定在工件的上表面,对于非对称工件,X、Y轴的原点一般设定在工件的左前角上;对于对称工件,X、Y轴的原点一般设定在工件对称轴的交点上。 图2-1-6 数控车床工件坐标系的 原点
五轴联动数控机床技术现状与发展趋势
五轴联动数控机床技术现状与发展趋势 摘要:介绍五轴联动数控机床在工业加工中的优势和重要性,从国、国外两个方面阐述目前五轴联动数控机床发展的现状,最后从目前机床工业发展动态出发展望五轴联动数控机床的发展趋势。 关键词:五轴联动数控机床技术现状发展趋势 一、简介 五轴联动数控机床是一种科技含量高、精密度高专门用于加工复杂曲面的机床,这种机床系统对一个国家的航空、航天、军事、科研、精密器械、高精医疗设备等等行业有着举足轻重的影响力。目前,五轴联动数控机床系统是解决叶轮、叶片、船用螺旋桨、重型发电机转子、汽轮机转子、大型柴油机曲轴等等加工的唯一手段。 二、国外研究现状 则仕,秋菊2005年提出一种五轴联动机器人运动学建模与仿真研究,探讨在VC++6.0集成编程环境下,调用OpenGL实现机器人的建模与仿真。对一种五轴联动机器人首先建立几何模型,对其正逆运动学问题进行分析求解,然后建立友好人机交互界面,对机器人示教再现过程进行模拟,最终实现让机器人走空间直线路径的轨迹规划仿真。该方法为五轴联动机器人研究开辟新的道路,为五轴联动机器人的实用化做好理论实践经验。 世田,殿柱,肖霞2006年提出基于UG/POST五轴联动加工中心专用后置处理器的研发,通过结舍UG/Post Builder后置处理器开发工具和上述后置处理算法,开发了该机床的专用后置处理器,并通过试验进一步验证了该后置处理器的正确性和实用性。 德国兹默曼公司2007年开发出FZ25龙门铣床,标志着Zimmermann(兹默曼)公司再次扩展了其高度专业化的五轴联动HSC龙门铣床的应用围。FZ 25非常适合大工件的干式切削,尤其是轻型的复合材料的加工,例如碳纤维和玻璃纤维强化塑料、环氧树脂、亚安酯、聚苯乙稀等。 杜玉湘,陆启建,明灯2007年提出五轴联动数控机床的结构和应用,介绍了五轴联动数控机床的几种结构及其特点和发展趋势;阐述了几种五轴联动机床加工的加工造型、编程(CAD/CAM系统)及其优缺点;详细描述了五轴联动数控机床对数控系统的要求及四开公司五轴联动数控系统的关键参数;列举了四开公司历年来参展的五轴联动数控机床及现场加工工件的情况。 燕红波,庆东,芳在2007年提出五轴联动的数控加工技术的研究及应用,五轴联动加工以其高柔性,高复合性,优良的切削位置姿态赢得越来越多用户的青睐,但编程的抽象和操作的复杂已经成为提高数控加工技术的一大瓶颈问题.本文介绍了多轴联动数控加工中心的结构模型,提出了基于典型的CAD/CAM软件UG的多轴后处理方法和加工实例,并对某一新型的五轴联动机床阐述了其各轴的坐标变换关系,开发了后处理系统,为多轴联动加工方案的制定提供了参考。 培楠,郭锐锋,黄艳等在2008年提出四元数五轴联动插补算法的研究,设计一种基于四元数五轴联动的插补算法,不仅简化了插补计算量,同时能够使刀具从一点平稳的运动到另一点,而且插补的轨迹更光滑连续.文章引入四元数理论,重点研究了四元数在构造数学模型和运动变换中的应用,并在Matlab中成功的进行了仿真.实验结果表明了该算法的可行性。四元数是最简单的超复数,那可不可以引入其他元数理论,产生的效果将会是怎么样呢? 士玉,徐树洛在2008年提出五轴联动龙门加工中心现状与发展探讨,通过对五轴联动龙门加工中心现状的分析,总结了机床总体结构特点,找出了国外机床在技术上的差距。提出了高端机床发展的相关理念。高端机床也意味着高技术,高投入和高产出。向高端技术发展,
数控机床控制技术与系统
数控机床控制技术与系统(期末复习) 1、 名词解释 数控:即采用数字控制的方法对某一工作过程实现自动控制的技术。 数控系统:能按照零件加工程序的数值信息指令进行控制,使机床完成工作运动并加工零件的一种控制系统。 2、数控加工程序按两类控制量分别输出:连续控制量(送往伺服系统)、离散的开关控制量(送往机床强电控制系统) 3、MDI 工作方式的三种功能:编程、PLC 参数修改、CNC 参数修改。 4、CNC 在机床工作时的作用:译码、插补、位置检测 PLC 的 作用:剩下的都是PLC 的,例如:工件夹紧、工作台转动等 编码器 1、 根据位置检测装置的安装形式和测量方式分为:直接测量和间接测量、 2、 按编码方式分为:绝对式测量和增量式测量,绝对式无需返参,直接测量。增量式开 机之后需要返参。 3、 位置测量装置分为:直线式、旋转式 4、 绝对式编码器按内部结构和测量方式分为接触式、光电式、电磁式 5、 码盘的分辨角:n 2 360?=α,分辨率=n 21。n —码盘的码道圈数。n 越大。分辨角越小,测量精度越高。 6、 编码器各部分的名称:P18 7、 光栅工作原理:是根据物理上莫尔条纹的形成原理进行工作的。当指示光栅与主光栅发生相对 位移,会形成莫尔条纹。其方向与光栅线纹方向大致垂直。两条莫尔条纹之间的距离为纹距W , 若栅距为ω,则有θ ω=w ,当工作台移动一个栅距,莫尔条纹就向上或向下移动一个纹距,莫尔条纹由光敏元件接受,从而产生电信号电信号经读数头中的电子线路板处理后。输出脉冲信号。 8、 光栅莫尔条纹纹距θ ω=W ,ω—栅距,θ—两条线纹之间的倾斜夹角。 9、 PLC 的接线图 10、 PMC 指令(考试可能会用到):应用数据检索功能指令(DSCH )、符合功能检查指令 (COIN )、后传输指令(MOVE )、译码指令(DEC ) 11、 给出电路图,表述工作原理 12、 直流电动机 ⑴ 正反馈(自己找) ⑵ 晶闸管小结:晶体闸流管的简称,又可称做可控硅整流器,最基本的用途就是可控整流,晶闸管导通的条件:1. 晶闸管阳极电路(阳极与阴极之间)施加正向电压。 2. 晶闸管控制电路(控制极与阴极之间)加正向电压或正向脉冲(正向触发电压)。 晶闸管导通后,控制极便失去作用。 依靠正反馈,晶闸管仍可维持导通状态。 晶闸管关断的条件:1.将阳极电压(电流)减小或断开,直到正反馈效应不能维持。 2.在晶闸管的阳极和阴极间加反相电压。 ⑶ 感阻性(自己找) ⑷ 降压斩波电路 升压斩波电路
数控车床中机床坐标系-机床参考点与工件坐标系的关系(1)
数控车床中机床坐标系\机床参考点与工件 坐标系的关系(1) [摘要] 我们可以把数控车床分为三大模块,一是数控系统,二是车床本体,三是被加工工件,它们分别有三个坐标系,编程坐标系、机床坐标系和工件坐标系。 [关键词] 机床坐标系机床参考点工件坐标系之间的关系 在多年的数控编程理论和实践教学中,笔者发现,许多学生只注重数控编程的学习,而对坐标系的设置只是机械的照搬,对各坐标系的原理和它们之间的关系却不求甚解,虽然经常强调,但在思想上还是引不起足够的重视,致使在实际使用的时候不知所措。 那么什么是机床坐标系什么是机床原点什么是机床参考点它们与设置工件坐标系又有什么关系呢 机床原点为机床上的一个固定点,也称机床零点或机床零位。是机床制造厂家设置在机床上的一个物理位置,在数控车床上,一般设在主轴旋转中心与卡盘后端面之交点处。以机床原点为坐标系原点在水平面内沿直径方向和主轴中心线方向建立起来的X、Z轴直角坐标系,成为机床坐标系。建立机床坐标系,其目的有三: 一、机床坐标系是制造和调整机床的基础
不论是普通车床还是数控车床,在车床硬件组装和调试时,都必须首先建立一个工艺点,以此为基准来调整和修调一些工艺尺寸诸如机床导轨与主轴轴线的平行度、导轨与主轴的高度、尾座顶尖与主轴是否等高、主轴的径向跳动量、轴向窜动量等等。这是一个固定点,这个工艺点一旦确定,一般不允许随意变动。 二、建立机床与数控系统的位置关系 我们可以把数控车床分为三大模块,一是数控系统,二是车床本体,三是被加工工件它们分别有三个坐标系,即程序坐标系、机床坐标系和工件坐标系。 数控机床上电后,三个坐标系并没有直接的联系,因此每次开机后无论刀架停留在机床坐标系中的任何位置,系统都把当前位置认定为,这样会造成坐标系基准的不统一,数控车床一般采用手动或自动方式让机床回零点的办法来解决这一问题。 其原理是将刀架运行到主轴旋转中心与卡盘后端面之交点处,这时溜板碰到了已预先精确设置好的行程开关或机械挡块,信号即刻传送到计算机系统,系统复位,此时CRT 上显示系统已预设置好的、坐标值,使机床与系统建立了同步关系,也就是让系统知道了机床零点的具体坐标位置,建立了测量机床运动坐标的起始点。此后CRT上会适时准确地跟踪刀架在机床坐标系中运动的每一个坐标值。
数控车床坐标系
一、基本坐标系 机床坐标轴: 为简化编程和保证程序的通用性,对数控机床的坐标轴和方向命 名制定了统一的标准,规定直线进给坐标轴用X,Y,Z表示,称基本 坐标轴。X,Y,Z坐标轴的相互关系用右手笛卡尔法则确定,如下图 所示 图中大拇指指向X轴的正方向, 食指指向Y轴的正方向, 中指指向Z轴的正方向。 小结:机床坐标系坐标轴应遵循的原则
运动方向的确定 刀具相对与静止工件而运动的原则,且刀具远离工件 的方向为坐标轴正方向。则坐标系用加“’”的字母 表示,按相对运动关系,工件运动的正方向恰好与刀 具运动的正方向相反,则有: ?+X=-X′ +Y=-Y′ +Z=-Z′ ?+A=-A′ +B=-B′ +C=-C′ 确定机床坐标轴的正方向
坐标轴方向的确定 1、Z轴坐标的运动 一般取产生切削力的主轴轴线方向为Z轴方向 2、X轴坐标的运动 X轴一般位于平行于工件装夹面的水平面内,且垂直于Z轴,车床上是对应刀架的径向移动方向。 3、Y轴坐标的运动 Y轴(车床上通常设为虚轴)于X轴和Z轴一起构成遵循右手笛卡尔坐标系。 确定机床坐 标系各坐标 轴的具体方 位的方法
二、坐标系的类型 1、机床坐标系 以机床原点为坐标原点建立起来的直角坐标系称为机床坐标系。 机床坐标系是机床固有的,它是制造和调整机床的基础,也是设 置工件坐标系的基础。其坐标轴及方向按标准规定,其坐标原点 的位置则由各机床生产厂设定,一般情况下,不允许用户随意变 动。 刀具运动的参照坐标系 机床坐标系
2、工件坐标系 工件坐标系也称编程坐标系,专供编程时使用,选择工件上的某一已知点为原点,建立一个新的坐标系,称为工件坐标系。,如下图所示。工件坐标系一旦建立便一直有效,直到被新的坐标系所代替为止。 工件坐标系编制程序所用的参照坐标系
双转台五轴联动数控机床对刀方法介绍
双转台五轴联动数控机床对刀方法介绍 发表时间:2014/8/5 作者:易军 关键字:双转台五轴联动数控机床对刀 投稿收藏好文推荐打印 轴联动数控机床是高效率、高精度加工空间曲面类零件。般将双转台的旋转轴线的交点作为加工坐标原点。双转台机床的对刀也就是要找到双转台旋转轴线的交点。轴联动,双转台五轴联动数控机床对刀方法介绍。 一引言 装备制造业是一国工业之基石,它为新技术、新产品的开发和现代工业生产提供重要的手段,是不可或缺的战略性产业。即使是发达工业化国家,也无不高度重视。近年来,随着我国国民经济迅速发展和国防建设的需要,对高档的数控机床提出了急迫的大量需求。五轴联动数控机床是高效率、高精度加工空间曲面类零件,如各类模具、水轮机和汽轮机叶片、三元流离心压气机、船用螺旋桨和推进器及螺旋锥齿轮的关键设备。代表机床制造业最高境界,从某种意义上说,也反映了一个国家的工业发展水平状况。 二双转台五轴联动数控机床结构 图1-1 双转台五轴联动机床结构简图 双转台五轴联动数控机床运动坐标包括3个移动坐标X、Y、 Z和两个个旋转坐标B、C(两个旋转轴均属转台类),B轴旋转平面为YZ平面,C轴旋转平面为XY平面。一般两个旋转轴结合为一个整体构成双转台结构,放置在工作台面上。( 3+2轴)。其特点是:加工过程中工作台旋转并摆动,可加工工件的尺寸受转台尺寸的限制,适合加工体积小、重量轻的工件;主轴始终为竖直方向,刚性比较好,可以进行切削量较大的加工。 三双转台五轴联动数控机床对刀方法 对刀的概念就是将编程坐标系和机床操作中的加工坐标 系重合起来,机床就会按照编写的程序进行加工。双转台五 轴机床的加工坐标,一般将双转台的旋转轴线的交点作为加工坐标原点,因此,双转台机床的对刀也就是要找到双转台旋转轴线的交点,加工原点的X、Y、Z轴坐标均由转台旋转轴线交点确定。 1.校正双转台
五轴联动数控机床行业市场调研分析报告
五轴联动数控机床行业市场调研分析报告
目录 第一节五轴联动数控机床:具有战略意义的大国重器 (4) 一、轰动一时的“东芝事件”:都是机床惹的祸 (4) 二、五轴联动数控机床:是什么样的设备 (10) 第二节五轴联动数控机床:为什么这么难制造 (16) 一、五轴联动数控机床难在哪里 (16) 二、真假五轴联动:如何区分李逵和李鬼 (17) 三、五轴联动数控机床发展趋势 (19) 第三节我国五轴联动数控机床发展情况 (23) 一、我国五轴联动数控机床已取得突破 (23) 二、我国重点企业和代表产品 (23) 三、我国五轴联动数控机床差距在哪里 (30)
图表目录 图表1:前苏联红海军维克多Ⅲ改进型核潜艇 (4) 图表2:“巴黎统筹会”将多轴联动精密机床列为禁运物资 (5) 图表3:康斯伯格交易文件 (5) 图表4:东芝公司违规出口到前苏联的MBP-100S高精密数控机床 (6) 图表5:五轴联动数控机床制造高精度螺旋桨 (7) 图表6:直布罗陀美军核潜艇与苏联K-219核潜艇相撞 (7) 图表7:日本报纸关于美国制裁东芝的报道 (8) 图表8:美国会议员砸东芝产品表示抗议 (8) 图表9:数控机床的坐标体系 (10) 图表10:数控机床五轴加工 (10) 图表11:工作台倾斜型五轴数控机床 (11) 图表12:主轴倾斜型五轴数控机床 (12) 图表13:工作台/主轴倾斜型五轴数控机床 (12) 图表14:复杂曲面加工 (13) 图表15:异型零件加工 (14) 图表16:五轴机床特殊工艺加工 (14) 图表17:我国研发的双摆角数控万能铣头 (17) 图表18:是否具备RTCP功能是区分真假五轴联动的标志 (18) 图表19:五轴联动和五轴三联动加工对比 (18) 图表20:高速电主轴 (19) 图表21:日本马扎克五轴联动车铣复合加工中心 (20) 图表22:机床智能化 (21) 图表23:机床网络化 (21) 图表24:济南二机床XKV27系列五轴联动定梁龙门移动数控镗铣床 (24) 图表25:中航工业五坐标数控龙门铣床 (24) 图表26:沈阳中捷VMC25100U五轴立式加工中心 (25) 图表27:大连机床CHD-25九轴五联动车铣复合中心 (26) 图表28:XNZ2430新型重型龙门式五轴混联机床 (26) 图表29:武汉重型机床集团CKX5680数控七轴五联动车铣复合加工机床 (27) 图表30:CKX5680数控七轴五联动车铣复合加工机床加工出的螺旋桨 (28) 图表31:大连科德制造的高精度五轴立式机床首次出口德国 (28) 图表32:华中数控8型CNC (29) 图表33:济南第二机床研发的A/C双摆角数控万能铣头 (29) 表格目录 表格1:五轴联动数控机床优势 (15) 表格2:五轴联动数控机床众多难点有待攻克 (16)
数控车床主轴系统
模块一对主轴驱动系统的认识 任务一掌握主轴驱动系统各种故障排查方法。 1.主轴驱动系统概述 主轴驱动系统也叫主传动系统,是在系统中完成主运动的动力装置部分。主轴驱动系统通过该传动机构转变成主轴上安装的刀具或工件的切削力矩和切削速度,配合进给运动,加工出理想的零件。它是零件加工的成型运动之一,它的精度对零件的加工精度有较大的影响。 引言 主轴驱动系统控制数控车床的旋转运动,为车床主轴提供驱动功率以及所需的切削力。目前在数控车床中,主轴驱动常使用交流电动机,直流电动机已被逐渐淘汰,由于受永磁体的限制,交流同步电动机功率做得很大时,电动机成本太高。因此目前在数控机床的主轴驱动中,均采用笼型异步电动机。为了获取良好的主轴特性,设计中采用矢量变频控制的交流主轴电动机,矢量部分分无速度传感器和有速度传感器的两种方式,后者具有更高的速度控制精度,在数控车床中无速度传感器的矢量变频器已经符合控制要求,因此,本设计中采用无速度的矢量变频器。 知识目标: 1、了解主轴驱动系统的控制原理。 2、了解各种故障的产生原因。 能力目标: 1、能够对主轴驱动系统启动故障进行排除和处理。 2、熟练掌握变频器的使用方法。 一、相关知识 1、数控机床对主轴驱动系统的要求 机床的主轴驱动和进给驱动有较大的差别。机床主轴的工作运动通常是旋转运动,不像进给驱动需要丝杠或其它直线运动装置作往复运动。数控机床通常通过主轴的回转与进给轴的进给实现刀具与工件的快速的相对切削运动。在20纪60-70年代,数控机床的主轴一般采用三相感应电动机配上多级齿轮变速箱实现有级变速的驱动方式。随着刀具技术、生产技术、加工工艺以及生产效率的不断发展,上述传统的主轴驱动已不能满足生产的需要。现代数控机床对主轴传动提出了更高的要求: 1)调速范围宽并实现无极调速 为保证加工时选用合适的切削用量,以获得最佳的生产率、加工精度和表面质量。特别对于具有自动换刀功能的数控加工中心,为适应各种刀具、工序和各种材料的加工要求,对主轴的调速范围要求更高,要求主轴能在较宽的转速范围内根据数控系统的指令自动实现无级调速,并减少中间传动环节,简化主轴箱。
基于变频器的经济型数控车床主轴控制系统设计及参数设置_图文_(精)
94科技资讯
科技资讯SCIENCE&TECHNOLOGY INFORMATION 2010NO.14 SCIENCE&TECHNOLOGY INFORMATION 工业技术 随着现代机械制造业水平的发展 , 数控机床普及率日益提高。数控车床是数控机床的主要品种之一 , 它在数控机床中占有非常重要的位置 , 一直受到世界各国的普遍重视 , 并得到了迅速的发展。主轴是车床构成中一个重要的部分 , 其功率消耗约占机床总功率 70%~80%,其性能直接影响到机床的加工效率、加工材料范围、加工质量等。数控系统需要控制主轴的转速、位置 , 通常系统的标准配置为数字主轴 , 具有控制精度高 , 动态响应好的特点。但在主轴功率不大 , 对控制精度和动态响应要求
不是很高的情况下 , 数字主轴就显得成本太高。这时可以采用数控系统的模拟主轴功能。模拟主轴就是数控系统输出模拟电压信号 , 采用普通的交流变频器和交流变频电机来实现主轴控制 , 由于性价比高 , 在经济型数控机床中广泛应用。 1变频调速基本原理 由异步电机理论可知 , 主轴电机的转速公式为 : n=(60f/p×(1-s 其中 P 为电动机的极对数 ,s 为转差率 , f 为电源的频率 ,n 为电动机的转速从上式可看出 , 电机转速与频率成正比 , 改变频率即可以平滑地调节电机转速。 变频器主电路如上图 1所示。主电路的功能是把固定频率为 50Hz 交流电转换为频率连续可调的三相交流电 , 主要包括交 -直电路、制动单元电路及直 -交电路。交 -直电路中 , 三相交流电源通过变频器的电源接线端 (R、 S 、 T 输入到变频器内 , 利用整流器 VS 把交流电转换为直流电。当电容CF 电压达到基准值时 , 辅助电源动作 , 输出直流控制电压。直流继电器MCC 获电 , 常开触点闭合 , 限流电阻 RF 被短路 , 完成交 -直电路 转换。直 -交电路中 , 由 VS 转换的直流电压经过短路保护熔断器F1加到逆变模块 VT, 再通过 SPWM 正弦波脉宽调制驱动电路控制 VT 输出频率可调的三相调制波 Ua 、 Ub 、 Uc(如图 2所示至 U 、 V 、 W 端子。输出电压的大小和频率是由改变图 2中的正弦参考信号 Ur 的幅值大小和频率调制的。制动单元电路由制动开关管 VB 、二极管 DB 及 B1、 B2端子之间外接制动电阻组成 , 外接制动电阻的功率与阻值需根据电动机的额定电流好工作情况进行选择。 2 主轴电机及变频器的选用
数控机床控制系统组成doc
1.数控机床控制系统由哪几部分组成? 答:数控机床控制系统的基本组成包括输入/输出装置、数控装置、伺服驱动装置、机床电气逻辑控制装置、位置检测装置。 2. 进给伺服系统的作用是什么? 答:伺服驱动装置是数控机床的执行机构,是数控系统和机床本体之间的电气联系环节。伺服系统的作用就是将进给位移量等信息转换成机床的进给运动,数控系统要求伺服系统正确、快速地跟随进给控制信息,执行机械运动,驱动工作台向指定的位置运动。 3. 数控机床按被控对象运动轨迹分为哪几类? 答:1)点位控制的数控机床 点位控制数控机床的数控装置只要求能够精确地控制从一个坐标点到另一个坐标点的定位精度,而不管是按什么轨迹运动,在移动过程中不进行任何加工。 2)直线控制的数控机床 直线控制数控机床一般要在两点间移动的同时进行加工,所以不仅要求有准确的定位功能,还要求从一点到另一点之间按直线规律运动,而且对运动的速度也要进行控制。 3)轮廓控制的数控机床 轮廓控制又称连续控制,大多数数控机床具有轮廓控制功能。其特点是能同时控制两个以上的轴,具有插补功能。它不仅控制起点和终点位置,而且要控制加工过程中每一点的位置和速度,加工出任意形状的曲线或曲面组成的复杂零件。 4. 试简述数控装置的组成。 答:目前的数控装置都是基于微型计算机的硬件和软件来实现其功能,所以称之为计算机数控(CNC)装置。它一方面具有一般微型计算机的基本结构,如中央处理单元(CPU)、总线、存储器、输入/输出接口等;另一方面又具有数控机床完成特有功能所需要的功能模块和接口单元,如手动数据输入(MDI)接口、PLC接口、纸带阅读机接口等。 CNC装置在上述硬件基础上必须编写相应的系统软件来指挥和协调硬件的 工作,两者缺一不可。CNC装置的软件由管理软件和控制软件两部分组成。 5. 数控装置硬件结构是如何分类的?
数控机床坐标系统介绍
湖南科技工业职业技术学院 教师课时授课计划 教师姓名谭晓芳课程名称数控编程授课时数2课时
课题三数控机床坐标系统 【新课导入】: 在数控编程时,为了描述机床的运动,简化编程的方法及保证记录数据的互换性,我们把数控机床的坐标系和运动方向均已标准化。今天,我们以数控机床坐标系统为主线,一起来学习相关的知识。 【新课内容】: 一、坐标轴和运动方向命名的原则 (1)、假定刀具相对于静止的工件而运动。当工件移动时,则在坐标轴符号上加“`”表示。 (2)、标准坐标系是一个右手直角笛卡尔坐标系。 (3)、刀具远离工件的运动方向为坐标轴的正方向。
二、坐标轴的规定 1、基本坐标轴 数控机床的坐标轴和方向的命名制订了统一的标准,规定直线进给运动的坐标轴用X,Y,Z表示,常称基本坐标轴。 2)旋转轴 围绕X,Y,Z轴旋转的圆周进给坐标轴分别用A,B,C 表示,根据右手螺旋定则,如图所示,以大姆指指向+X,+Y,+Z方向,则食指、中指等的指向是圆周进给运动的+A,+B,+C方向。 3)附加坐标轴 在基本的线性坐标轴X,Y,Z之外的附加线性坐标轴指定为U,V,W 和P,Q,R。这些附加坐标轴的运动方 向,可按决定基本坐标轴运动方向的方法来决定。
三、机床坐标轴的确定 (1)Z坐标轴。 1)在机床坐标系中,规定传递切削动力的主轴为Z坐标轴。 2)对于没有主轴的机床(如数控龙门刨床),则规定Z坐标轴垂直于工件装夹面方向。 3)如机床上有几个主轴,则选一垂直于工件装夹面的主轴作为主要的主轴。 (2)X坐标轴。 1)X坐标轴是水平的,它平行于工件装夹平面。 2)对于工件旋转的机床,X坐标的方向在工件的径向上,并且平行于横滑座。 3)对于刀具旋转的机床,如Z坐标是水平(卧式)的,当从主要刀具的主轴向工件看时,向右的方向为X的正方向;如Z坐标是垂直(立式)的,当从主要刀具的主轴向立柱看时,X的正方向指向右边。 4)对刀具或工件均不旋转的机床(如刨床),X坐标平行于主要进给方向,并以该方向为正方向。 (3)Y坐标轴。Y坐标轴根据Z和X坐标轴,按照右手直
五轴联动数控机床技术现状与发展趋势
五轴联动数控机床技术现 状与发展趋势 Last revision date: 13 December 2020.
五轴联动数控机床技术现状与发展趋势摘要:介绍五轴联动数控机床在工业加工中的优势和重要性,从国内、国外两个方面阐述目前五轴联动数控机床发展的现状,最后从目前机床工业发展动态出发展望五轴联动数控机床的发展趋势。 关键词:五轴联动数控机床技术现状发展趋势 Abstract:The advantages and impo~ance of five—axis CNC machine tools in industrial machining are presented. The status quo of development of five—axis CNC machine tools at home and abroad is described and their developing prospect given. Key Words:Five——axis CNC M achine Tools Technology Status Developing Trends[17] 一、简介 五轴联动数控机床是一种科技含量高、精密度高专门用于加工复杂曲面的机床,这种机床系统对一个国家的航空、航天、军事、科研、精密器械、高精医疗设备等等行业有着举足轻重的影响力。目前,五轴联动数控机床系统是解决叶轮、叶片、船用螺旋桨、重型发电机转子、汽轮机转子、大型柴油机曲轴等等加工的唯一手段。 二、国内外研究现状 陈则仕,张秋菊2005年提出一种五轴联动机器人运动学建模与仿真研究,探讨在VC++6.0集成编程环境下,调用OpenGL实现机器人的建模与仿真。对一种五轴联动机器人首先建立几何模型,对其正逆运动学问题进行分析求解,然后建立友好人机交互界面,对机器人示教再现过程进行模拟,最终实现 让机器人走空间直线路径的轨迹规划仿真[1]。该方法为五轴联动机器人研究开 辟新的道路,为五轴联动机器人的实用化做好理论实践经验。 赵世田,孙殿柱,孙肖霞2006年提出基于UG/POST五轴联动加工中心专用后置处理器的研发,通过结舍UG/Post Builder后置处理器开发工具和上述后置处理算法,开发了该机床的专用后置处理器,并通过试验进一步验证了该 后置处理器的正确性和实用性[2]。 德国兹默曼公司2007年开发出FZ25龙门铣床,标志着Zimmermann(兹默曼)公司再次扩展了其高度专业化的五轴联动HSC龙门铣床的应用范围。FZ 25非常适合大工件的干式切削,尤其是轻型的复合材料的加工,例如碳纤维和 玻璃纤维强化塑料、环氧树脂、亚安酯、聚苯乙稀等[3]。 杜玉湘,陆启建,刘明灯2007年提出五轴联动数控机床的结构和应用,介绍了五轴联动数控机床的几种结构及其特点和发展趋势;阐述了几种五轴联动机床加工的加工造型、编程(CAD/CAM系统)及其优缺点;详细描述了五轴联动数控机床对数控系统的要求及四开公司五轴联动数控系统的关键参数;列举了 四开公司历年来参展的五轴联动数控机床及现场加工工件的情况[4]。
五轴联动数控机床加工中心基本知识介绍
五轴联动数控机床加工中心基本知识介绍 几十年来,人们普遍认为五轴数控加工技术是加工连续、平滑、复杂曲面的惟一手段。一旦人们在设计、制造复杂曲面遇到无法解决的难题,就会求助五轴加工技术。早在20世纪60年代,国外航空工业生产中就开始采用五轴数控铣床。目前五轴数控机床的应用仍然局限于航空、航天及其相关工业。 五轴联动数控是数控技术中难度最大、应用范围最广的技术,它集计算机控制、高性能伺服驱动和精密加工技术于一体,应用于复杂曲面的高效、精密、自动化加工。国际上把五轴联动数控技术作为一个国家生产设备自动化水平的标志。由于其特殊的地位,特别是对于航空、航天、军事工业的重要影响,以及技术上的复杂性,西方工业发达国家一直把五轴数控系统作为战略物资实行出口许可证制度,对我国实行禁运。因而,研究五轴数控加工技术对国家科技力量和综合国力的提高有重要意义。 符合数控机床发展的新方向 近几年国际、国内机床展表明,数控机床正朝着高速度、高精度、复合化的方向发展。复合化的目标是在一台机床上利用一次装夹完成大部分或全部切削加工,以保证工件的位置精度,提高加工效率。国外数控镗铣床、加工中心为适应多面体和曲面零件加工,均采用多轴加工技术,包括五轴联动功能。在加工中心上扩展五轴联动功能,可大大提高加工中心的加工能力,便于系统的进一步集成化。最近国际机床业出现了一个新概念,即万能加工,数控机床既能车削又能进行五轴铣削加工。五轴数控机床在国内外的实际应用表明,其加工效率相当于两台三轴机床,甚至可以完全省去某些大型自动化生产流水线的投资,大大节约了占地空间和工件在不同制造单元之间的周转运输的时间和花费。 发展和推广的难点及阻力何在 显然,人们早已认识到五轴数控技术的优越性和重要性。但到目前为止,五轴数控技术的应用仍然局限于少数资金雄厚的部门,并且仍然存在尚未解决的难题。五轴数控技术为何久久未能得以广泛普及?五轴数控加工由于干涉和刀具在加工空间的位姿控制,其数控编程、数控系统和机床结构远比三轴机床复杂得多。目前,五轴数控技术在全球范围内普遍存在以下问题。 五轴数控编程抽象、操作困难 这是每一个传统数控编程人员都深感头疼的问题。三轴机床只有直线坐标轴,而五轴数控机床结构形式多样;同一段NC代码可以在不同的三轴数控机床上获得同样的加工效果,但某一种五轴机床的NC代码却不能适用于所有类型的五轴机床。数控编程除了直线运动之外,还要协调旋转运动的相关计算,如旋转角度行程检验、非线性误差校核、刀具旋转运动计算等,处理的信息量很大,数控编程极其抽象。
(2010春)数控机床电气控制作业及答案
数控机床电气控制作业(一) 1.按钮开关和行程开关的作用分别是什么?如何确定按钮开关的选用原则? 答:按钮开关通常用作短时接通或断开小电流控制电路的开关,用于控制电路中发出起动或停止等指令,通过接触器、继电器等控制电器接通或断开主电路。 行程开关又称限位开关,是根据运动部件位置而切换电路的自动控制电器。动作时,由挡块与行程开关的滚轮相碰撞,使触头接通或断开用来控制运动部件的运动方向、行程大小或位置保护。 按钮开关的选用原则 ①根据用途选择开关的形式,如紧急式、钥匙式、指示灯式等。 ②根据使用环境选择按钮开关的种类,如开启式、防水式、防腐式等。 ③按工作状态和工作情况的要求,选择按钮开关的颜色。 2.低压断路器在电路中的作用是什么?P12 3.接触器的用途是什么?它由哪几部分组成?P15 4.接近开关与行程开关相比有哪些优点?若接近开关为三线制输出,一般为哪三根输出线? 答:接近开关又称无触点行程开关。与行程开关相比,接近开关具有工作稳定可靠、使用寿命长、重复定位精度高、操作频率高等优点。 接近开关多为三线制。三线制接近开关有二根电源线(通常为24V)和一根输出线,输出有常开、常闭两种状态。 5..中间继电器的作用是什么?P21它和交流接触器有何区别? 答接触器是一种用来频繁地接通或分断带有负载(如电动机)的主电路自动控制电器。而继电器是一种根据某种输入信号的变化,而接通或断开控制电路,实现控制目的的电器,中间继电器实质上是电压继电器的一种。 6.电动机起动电流很大,当电动机起动时,热继电器会不会动作?为什么? 答:热继电器是利用电流的热效应原理来切断电路的保护电器,主要用于电动机或其他负载的过载保护。 电动机起动电流很大,但是,当电动机起动时,热继电器不会动作。因为,热继电器由于热惯性,其双金属片在短时间内不会弯曲,当电路短路时不能立即动作使电路立即断开,因此不能作短路保护。 8 .三相异步电动机的起动控制采用哪两种方式?
数控机床坐标系
数控机床坐标系
教学过程 图2-3 右手直角坐标系 2.刀具运动坐标与工件运动坐标 数控机床的坐标系是机床运动部件进给运动的坐标系。由于进给 运动可以是刀具相对于工件的运动(车床),也可以是工件相对于刀具 的运动(铣床),所以统一规定:有字母不带“'”的坐标表示刀具相 对于“静止”的工件而运动的刀具运动坐标;带“'”的坐标表示工 件相对于“静止”的刀具而运动的工件运动坐标。 3.运动的正方向 运动的正方向是使刀具与工件之间距离增大的方向。 (三)、X、Y、Z坐标轴与正方向的确定 1.Z坐标轴 (1) Z坐标轴的运动由传递切削力的主轴决定,与主轴轴线平 行的标准坐标轴为Z坐标轴,其正方向为增加刀具和工件之间距离的 方向。 (2)若机床没有主轴(刨床),则Z坐标轴垂直与工件装夹平面。 (3)若机床有几个主轴,可选择一个垂直与工件装夹平面的主要 轴为主轴,并以它确定Z坐标轴。 2.X坐标轴 (1)X坐标轴的运动是水平的,它平行于工件装夹平面,并垂直 于Z坐标轴。是刀具或工件定位平面内运动的主要坐标轴 (2)对于工件旋转的机床(车床、磨床),X坐标轴的方向在工 件的径向上,并且平行与横滑座,刀具离开工件回转中心的方向为X 坐标轴的正方向。 教师通过多 媒体讲解,模型 演示,学生分组 练习,教师巡回 指导
教学过程 (3)对于刀具旋转的机床(铣床),若Z坐标轴是水平的(卧式铣床),当由主轴向工件看时,X坐标轴的正方向指向右方;若Z坐标轴是垂直的(立式铣床),当由主轴向立柱看时,X坐标轴的正方向指向右方;对于双立柱的龙门铣床,当由主轴向左侧立柱看时,X 坐标轴的正方向指向右方。 (4)对刀具和工件均不旋转的机床(刨床),X坐标平行于主要切削方向,并以该方向为正方向。 3.Y坐标轴 根据X、Z坐标轴,按照右手笛卡儿直角坐标系确定。 注:如在X、Y、Z主要直线运动之外还有第二组平行于它们的运动,可分别将它们坐标定为U、V、W。 立式数控铣床的坐标方向为: Z轴垂直(与主轴轴线重合),向上为正方向;面对机床立柱的左 右移动方向为X轴,将刀具向右移动(工作台向左移动)定义为正方向; 根据右手笛卡尔坐标系的原则,Y轴应同时与Z轴和X轴垂直,且正方向指向床身立柱。 卧式升降台铣床的坐标方向为: Z轴水平,且向里为正方向(面对工作台的平 行移动方向);工作台的平行向左移动方向为X轴正方向;Y轴垂直向上。