伪谱最优控制方法
伪谱最优控制方法, 又称为正交配置法, 主要利用Lagrange 插值多项式近似离散最优控制问题中的状态变量和控制变量, 将连续型最优控制问题转化成离散形式的非线性规划(NLP) 问题, 然后利用相应的NLP 算法求解. 根据配置点的不同, 伪谱法主要分为Legendre 伪谱法[1]、Gauss 伪谱法[2-3] 和Radau 伪谱法[4-5] 3 种.
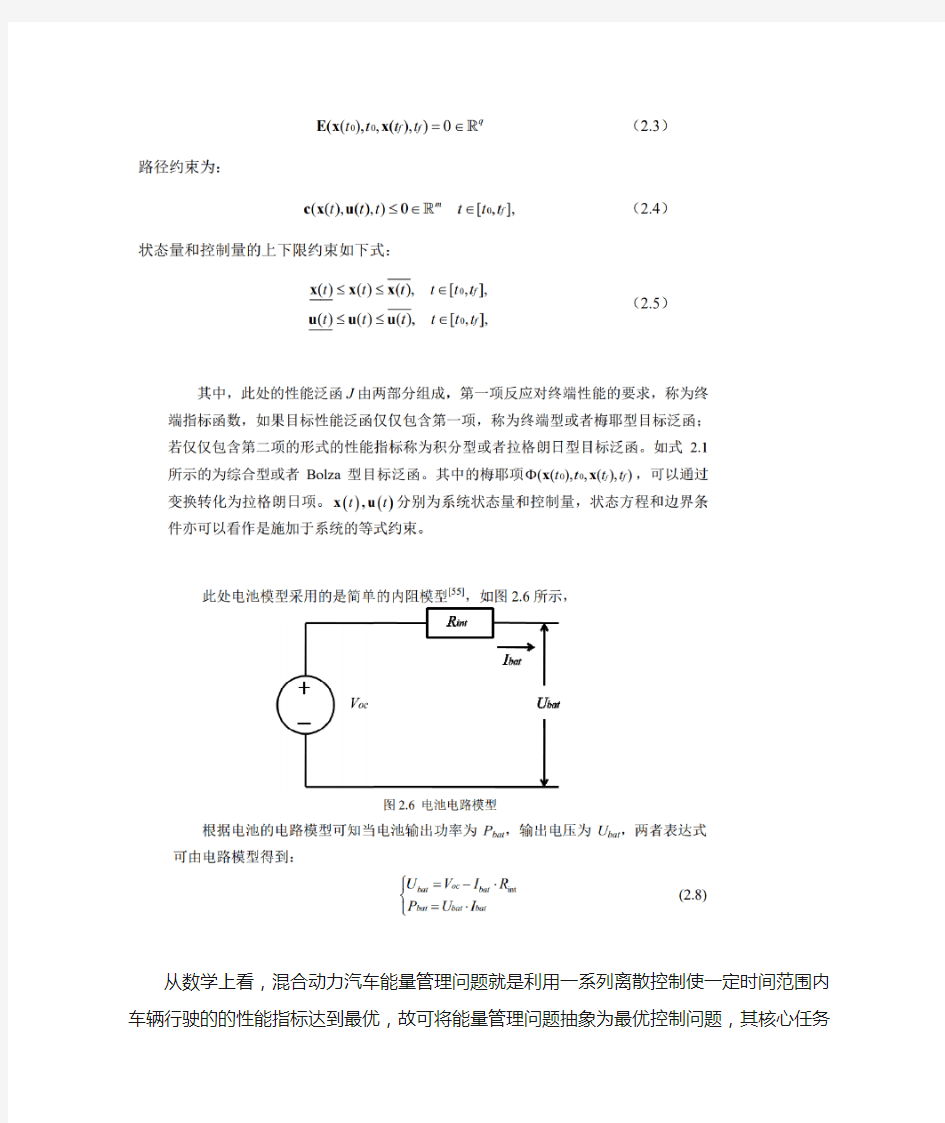
为了利用最优控制理论研究串联式混合动力的能量管理策略,需要建立动力总成和各个能量源的数学模型。文中忽略动力系统传动部件的效率损失。串联混合动力驱动系统的能量管理为复杂的非线性系统,其最优控制问题是寻找最优控制序列使得给定的性能指标能够达到最小,同时,也要满足一定的机械和电气约束。本文研究重点在最优控制理论的应用,采用较简单的模型进行混合动力车辆能量管理的研究。整车能量管理问题作为最优控制问题求解,需要形成通用形式表达的最优控制问题。
非线性最优控制问题(Optimal Control Problem, OCP)是指性能指标、状态方程或者约束条件中存在非线性函数项的最优控制问题,通用的表述形式为确定状态x (t),控制u(t) 使性能泛函J 取得最小值:
从数学上看,混合动力汽车能量管理问题就是利用一系列离散控制使一定时间范围内车辆行驶的的性能指标达到最优,故可将能量管理问题抽象为最优控制问题,其核心任务就是获得最优的控制律。
直接法理论
优化问题一般分为参数优化(离散、静态)和过程优化(连续、动态)两大类。最优控制问题本质上是一个连续、动态的过程优化问题,采用动态优化方法求解,比如变分法和极大值原理。但现代计算技术的高速发展使得静态/动态、离散/连续的界限越来越模糊。目前基于求解非线性规划问题的参数优化方法越来越多应用于求解类似于最优控制问题或者动态轨迹优化问题,这就是轨迹优化中的直接法。
直接法通过引入时间离散网格,将控制变量和/或状态变量离散,并将动态约束条件转化为代数约束条件,最终使原来的连续轨迹优化问题转化为一个离散参数优化问题即非线性规划问题(Nonlinear Programing, NLP),结合非线性规划求解器即可获得最优解。优化变量通常包含离散网格点上的控制变量序列和/或状态变量序列。
伪谱法
状态和控制变量离散化
微分矩阵与导数近似
NLP 问题的形成