蚁群算法
蚁群算法的改进与应用
摘要:蚁群算法是一种仿生优化算法,其本质是一个复杂的智能系统,它具有较强的鲁棒性、优良的分布式计算机制和易于与其他方法结合等优点。但是现在蚁群算法还是存在着缺点和不足,需要我们进一歩改进,如:搜索时间长、容易出现搜索停滞现象、数学基础还不完整。本文首先说明蚁群算法的基本思想,阐述了蚁群算法的原始模型及其特点,其次讨论如何利用遗传算法选取蚁群算法的参数,然后结合对边缘检测的蚁群算法具体实现过程进行研究分析,最后对本论文所做的工作进行全面总结,提出不足之处,并展望了今后要继续研究学习的工作内容。
关键词:蚁群算法;边缘检测;阈值;信息素;遗传算法;
1 前言
蚁群算法是近年来提出的一种群体智能仿生优化算法,是受到自然界中真实的蚂蚁群寻觅食物过程的启发而发现的。蚂蚁之所以能够找到蚁穴到食物之间的最短路径是因为它们的个体之间通过一种化学物质来传递信息,蚁群算法正是利用了真实蚁群的这种行为特征,解决了在离散系统中存在的一些寻优问题。该算法起源于意大利学者 Dorigo M 等人于 1991 年首先提出的一种基于种群寻优的启发式搜索算法,经观察发现,蚂蚁在寻找食物的过程中其自身能够将一种化学物质遗留在它们所经过的路径上,这种化学物质被学者们称为信息素。这种信息素能够沉积在路径表面,并且可以随着时间慢慢的挥发。在蚂蚁寻觅食物的过程中,蚂蚁会向着积累信息素多的方向移动,这样下去最终所有蚂蚁都会选择最短路径。该算法首先用于求解著名的旅行商问题(Traveling Salesman Problem,简称 TSP)并获得了较好的效果,随后该算法被用于求解组合优化、函数优化、系统辨识、机器人路径规划、数据挖掘、网络路由等问题。
尽管目前对 ACO 的研究刚刚起步,一些思想尚处于萌芽时期,但人们已隐隐约约认识到,人类诞生于大自然,解决问题的灵感似乎也应该来自大自然,因此越来越多人开始关注和研究 ACO,初步的研究结果已显示出该算法在求解复杂优化问题(特别是离散优化问题)方面的优越性。虽然 ACO 的严格理论基础尚未奠定,国内外的有关研究仍停留在实验探索阶段,但从当前的应用效果来看,这种自然生物的新型系统寻优思想无疑具有十分光明的前景。但该算法存在收敛速度慢且容易出现停滞现象的缺点,这是因为并不是所有的候选解都是最优解,而候选解却影响了蚂蚁的判断以及在蚂蚁群体中,单个蚂蚁的运动没有固定的规则,是随机的,蚂蚁与蚂蚁之间通过信息素来交换信息,但是对于较大规模的优化问题,这个信息传递和搜索过程比较繁琐,难以在较短的时间内找到一个最优的解。
由于依靠经验来选择蚁群参数存在复杂性和随机性,因此本文最后讨论如何利用遗传算法选取蚁群算法的参数。遗传算法得到的蚁群参数减少了人工选参的不确定性以及盲目性。
2 基本蚁群算法
2.1 蚁群算法基本原理
根据仿生学家的研究结果表明,单只蚂蚁不能找到从巢穴到食物源的最短路
径,而大量蚂蚁之间通过相互适应与协作组成的群体则可以,蚂蚁是没有视觉的,但是是通过蚂蚁在它经过的路径上留下一种彼此可以识别的物质,叫信息素,来相互传递信息,达到协作的。蚂蚁在搜索食物源的过程中,在所经过的路径上留下信息素,同时又可以感知并根据信息素的浓度来选择下一条路径,一条路径上的浓度越浓,蚂蚁选择该条路径的概率越大,并留下信息素使这条路径上的浓度加强,这样会有更多的蚂蚁选择次路径。相反,信息素浓度少的路
径,蚂蚁选择的概率小,该路径随着时间的推移信息素逐渐挥发,而导致以后蚂蚁选择的可能性更小。最终蚂蚁找出了最优路径同时当运动的路径出现障碍物时,蚂蚁可以很快的适应环境的变化,绕过障碍物重新找到最优路径。蚂蚁就是通过群体间相互交换信息,自催化行为来实现正反馈过程找到当前最短路径的。
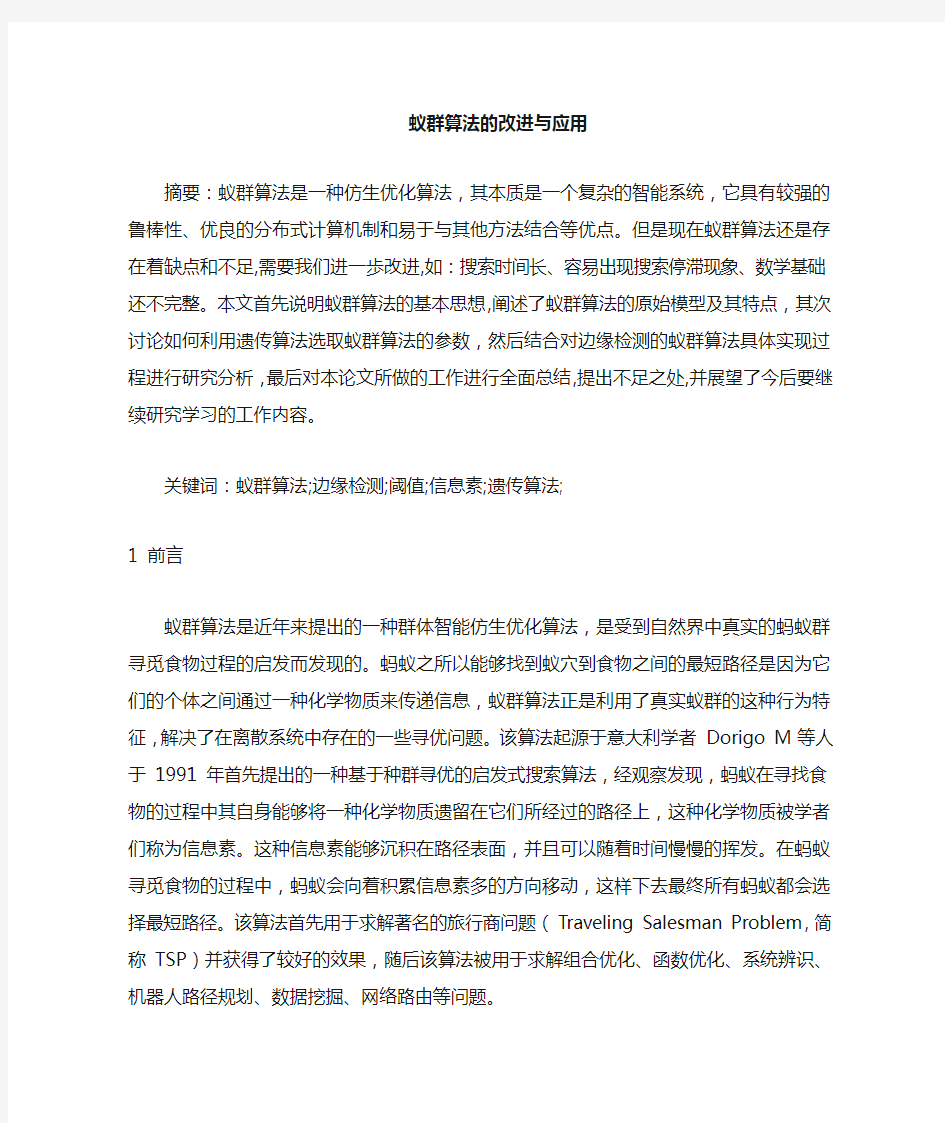
自然界的觅食行为可以通过下图来模拟,并且说明了蚁群群体的搜索原理。
图2.1 蚂蚁从巢穴到食物源的搜索过程
如图1,A是食物源,F是巢穴,AB、BD、DE、EF长度都为1,BC、CE长度为2,假设蚂蚁爬行速度为1,一个时间单位蚂蚁在经过的路径上残留信息素为1,所有的路径上的信息素浓度一开始都初始化为0。
当t=0时,在巢穴F处放置40只蚂蚁,它们开始寻找食物源A,当时,它们都到达E处,有两侧道路可以选择,因为CE和DE上没有信息素,所以它们选择左侧道路或右侧道路的概率是一样的,20只蚂蚁走左侧,20只走右侧。
当t=4时,选择了BDE路径的蚂蚁到达食物源,并立即返回,而此时选择了BCE路径的蚂奴正在BC中点处。
当t=5时,正在返回的蚂蚁和正赶往食物源的蚂蚁正好在B处相遇,此时BC和BD路径上的信息素浓度是一样的。所以返回的20只蚂蚁中,有10只将选择BD,10只选择路径BC。
当t=7时,有20只蚂蚁在B处,因为BC和BD路径上的信息素一样,所以将有10只选择BC,10只选择BD。另外此时有10只蚂奴在C处,10蚂蚁在E处。
当t=8时,在巢穴上的有10只妈蚁,同时CE的中点处、BC的中点处和D点上也各有10只蚂蚁。
当t=9时,已返回巢穴的10只蚂蚁到达E处,此时,CE上的信息素浓度是30,而DE上是40,因此将有较多的蚂蚁选择右侧道路DE,从而增强了该路径上的信息素,使得DE上的信息素浓度比CE的差值变大,直接导致后来的蚂奴选择DE的概率更大,进而又促进它们的信息素浓度差异越来越大,越来越多的蚂蚁选择路径DE,从而最终的结果是所有蚂蚁选择了路径DE,找到了最短路径ABDEF。蚂蚁通过群体间的协作来寻找食物源的行为过程表现出正反馈现象:一条路径上蚂蚁经过的越多,留下的信息素也就越多,后来的蚂蚁选择该条路径的概率也就越大,从而又促进了该条路径的信息素浓度,最终蚂蚁找到了最短的路径。
2.2蚁群算法数学模型
旅行商问题(traveling salesman problem, TSP)是经典的组合优化问题,也是蚁群优化算法最早应用和最为成功的一个例子,并且最初该算法的提出也是在TSP问题上进行了描
述。所以我们这里也以TSP问题为应用背景进行描述。
所谓旅行商问题是指单个旅行商由起点出发,经过连通图中的所有节点并回到出发点所用的最小路径代价。Dantzig等人于1959年最早提出了旅行社问题的数学模型。
AS (Ant System)是Dorigo等人提出的最早的也是最基础的蚁群算法模型,该算法在TSP 问题的描述如下:设有m只蚂蚊并将它们放在具有n个节点的连通图上,表示t时刻
在i,j连线上的信息素,是与问题相关的启发式信息,一般情况下。初始时刻,各个连通图的边信息素相同,即(C为常数)。表示第k只蚂蚁目前的路径选择集合。t时刻蚂蚁k在位置i转移到j的概率表示为:
(1)
其中,表示第k只蚂蚁当前还能选择的路径总和;α和β分别表示
信息素τ和启发式信息η的相对重要程度。
当经过n个时刻后,蚂蚁将完成一次节点的遍历,为了防止信息过多的堆积而造成对蚂蚁选择的影响,这时应该对各个路径上的信息素进行调整,如下:
(2)
(3)
-1表示信息素的挥发率,一般设置ρ在0到1之间,够其中ρ表示信息素的保留率,ρ
防止信息的无限积累;表示蚂蚁k在一次循环中在路径i, j留下的信息素浓度;表示本次循环中路径i, j上信息素的总增量,它包含所有蚂蚁在当前循环下在该路径上留下的信息素。根据信息素更新策略的不同,又可将基本蚁群优化算法分为三类:
(1)ant-cycle模型:
(4) (2) ant-density模型:
(5)
(3) ant-quantity模型:
(6)
L表示第k只蚂蚁在当前其中Q为一个和蚂蚁留在路径上的路径总量相关的一个常数,
k
循环中的遍历路径总和。
2.3 蚁群算法步骤
具体步骤为:
步骤1:参数初始化,设置NC为迭代次数,令t=0, NC=0;
步骤2:将m只蚂蚁随机放在n个节点,令
()00
ij
τ?=
,设置NC++ ;
步骤3:建立禁忌表,计算蚂蚁k的转移概率,选择并移动到下一节点j,同时将j加入到tabuk中;
步骤4:tabuk是否满足条件。若为否,回到步骤3,否则,继续步骤5;
步骤5:依据信息素更新公式进行信息素的全局更新;
步骤6-保存最短路径,重复执行步骤2到步骤5,直到执行次数NC达到指定的最大迭代次数或连续若干代内没有更好的解出现为止。
图2.2蚁群算法基本流程
3 利用遗传算法处理蚁群算法参数
3.1遗传算法基本原理
遗传算法作为一种求解问题的随机高效全局搜索方法,对其搜索空间无需有先验知识。而是通过在搜索空间随机产生初始种群,然后在目标函数的作用下,经过个体之间信息的交换,一步步地逼近最优解。
(1)算法设计
编码把需要解决的问题进行相应的编码,由于图像灰度值在0-255之间,故将各个染色体编码为8位二进制码。
人口模型若人口数过多,则每一代适应度值的计算量大,但如果人口数过少,又难以体现物种的多样性。因此人口数设置应该合理。对于蚁群参数设置人口数为10,最大遗传代数
为100。
解码染色体解码为2个0-255之间的值。
适应度函数适应度函数是评价各个体的标准,一定要选择能体现进化的趋势。在此,选择适应度函数作为蚁群参数选取的依据。
选择遗传算法选择那些适应度高的个体作为产生下一代种群的个体。
交叉交叉是产生新个体的主要方法。蚁群边缘检测参数分别在前8位和后8位进行单点交叉。在此设置交叉概率为0.6。
变异变异决定了遗传操作的局部搜索能力。在此,设置变异概率为0.5。
终止准则规定当算法执行到最大遗传代数时终止。
图3.1 遗传算法流程图
(2)蚁群算法图像边缘检测方法
基于蚁群算法的边缘检测方法进行图像边缘检测的基本思想:首先边缘检测问题可以转化成基本蚁群算法模型的改进,即将图像抽象为一幅由像素点组成的无向图,其次将设置的人工蚂蚁随机放置在此二维的无向图中,根据各个蚂蚁在其4邻域或者8邻域内可行的像素点上的移动情况计算信息素矩阵,完成设置的迭代次数之后,利用选取的阈值判断边缘点。其中移动的转移概率根据可行像素点的信息素强度和信息素启发引导函数共同影响求得,蚂蚁的移动方向由其允许移动领域内的像素值的变化决定。
蚁群算法的根本目的旨在通过指导性的探索迭代找到问题的最优解。基于蚁群算法的边缘检测的核心思想可描述如下:
k只蚂蚁被放置在由个像素点组成的空间矩阵上。
①随机放置k只蚂蚁在初始信息素矩阵上。
②初始化迭代步数N。
③根据转移概率公式计算出蚂蚁移动的下个像素点。
④根据信息素的更新规则更新像素点信息素。
⑤根据最终信息素矩阵选取阈值,确定图像边缘像素点。
具体过程如下所示:
A.初始化:
初始化设置在系统搜索的幵始。在这个步骤中,进行必要的初始过程。例如:设参数和分配初始信息的值。首先放置k个蚂蚁于图像I上(图像由像素点构成),每个像素点被看
成是蚂蚁将要爬行的一个无向图中的结点,开始时信息素矩阵被设为。
B.初步构建:
从k个蚂蚁中随机选择一只,令其在图像矩阵(由像素点组成的图像矩阵)上移动规定移动步数。计算从像素点(l,m)到像素点(i,j)的转移概率值像素点(i,j)为相邻的允许范围内的像素点,搜索过程中的状态转移概率公式表示如下:
(7)这里表示第n-1次迭代结束后像素点(i,j)处的残留的信息素值,像素点(l,m)的容
许移动到的邻接像素点范围用表示,α和β分别代表信息素影响因子和启发函数的影响因子。其中由像素点(i,j)处的8-邻域灰度梯度值来确定,表示像素点(l,m)到像素点(i,j)信息素启发引导函数(能见度函数),用公式计算。定义为启发引导函数的归一化因子。
示意图如图3.2所示。
图3.2在像素点处计算
这里表示图像矩阵中点周围的8-邻域像素灰度的梯度值。
表达式如下所示:
(8)而函数由式(9)、式(10)、式(11)、式(12)进行计算,其中 取30:
(9)
(10)
(11)
(12)
函数数坐标图分别由图3.3表示如下:
图3.3 取λ=30时四个函数的坐标图
蚂蚁移动的邻域设为4-邻域或8-邻域。如图3.4(a)所示像素点的4-邻域和图3.4 (b)所示8-邻域:
图3.4 像素点的4-邻域图和8-邻域
C.更新过程:两次更新。
本论文中信息素矩阵需要进行局部和全局两次更新。
k∈)只蚂蚁,完成一次构建迭代,若第k只蚂蚁在构第一次进行局部更新:移动k(m
建过程中爬过像素点(i,j),则调整点(i.j)处的信息素值计算式(3)、式(14);否则点(i,j)处点的信息素不进行调整。其中是第n-1次迭代时,像素点(i,j)上残留下的信息素值。
式(14)中ρ是信息素的挥发系数,ρ取0.08。而1-ρ指未被挥发的信息素残留下的量。
由启发引导函数决定。
(13)
(14)
第二次进行全局更新:所有蚂蚁走完一趟构建过程,信息素矩阵根据式(15)进行更新。
(15)
其中表示整个信息素矩阵衰退系数,取0.05。是初始状态下预先给定的信息素矩阵,矩阵中所有像素点初值均为0.0001。
蚂蚁系统中信息素只更新一次,而蚁群系统中信息素更新两次,蚁群边缘检测采用蚁群系统的信息素更新方式,更新两次,由于奴群算法是一种概率型算法,所以蚂蚁能找出更多的创新解,避免蚁群边缘检测算法陷入局部最优解。当所有蚂蚁走完一趟时,进行全局更新,其中是第n-1次迭代后的信息素矩阵。
D.决策过程:
对每个像素点是否是边缘点进行二元阈值判定。首先根据奴群完成所有迭代次数之后得到的信息素矩阵,计算阈值。
1.对最终信息素矩阵求其每个信息素的均值,得到初始的阈值如式(16)所示:
(16)
2.按照准则分析矩阵中的每个信息素值,若小于,则记为;,若其值大于,则记为,对所有信息素以及的这两类信息素进行如式(17)和式(18)计算。
3.计算小于范围内的平均信息素值和大于范围内的平均信息素值。
(17)
(18)
其中当时,)取 1,取x ;当时,取 1,取x。
4.计算一个新阈值如式(19)。
(19)
5.按照以上计算阈值的规则,重复步骤2到步骤4,直到这里=0.1,l是计算阈值的迭代次数。迭代计算停止,否则继续比较本次阈值和上次阈值,直到满足设定的值,停止迭代。
最后依据求得的阈值判断矩阵中像素点是否是边缘点。若,则视为边
缘点,进行提取。否则不是边缘点。
本文蚁群边缘检测算法的具体流程如图3.5所示:
图3.5 图像边缘检测方法流程图
(3)本文参数选取
然而在实际运用中,针对不同的图像,本文需要选择采用不同的参数,从而得到较满意的分割效果。以往的做法需要对4个参数中的任何一个设定一个范围,然后按一定间距进行试验,4个参数的话需要进行大量的实验,即需要极大的计算量才能得到。
鉴于蚁群算法存在的参数选取困难的问题,我们提出采用遗传算法来搜索满足边缘提取效果的参数。实验证明,只要目标函数选取得当,由遗传算法得到的参数对图像的边缘提取效果较好。
3.2 利用遗传算法选取蚁群算法参数
利用遗传算法来寻找蚁群边缘检测算法中实现图像边缘提取的满意参数,首先,由上文可知我们需要确定的参数包括,状态转移概率的信息素影响因子α,启发引导函数的影响因子β,启发引导函数的系数λ,迭代次数N共4个。
(1)初始种群的构造
因要寻优的参数有4个,我们对于每个参数采用16位二进制编码表示,而每个个体我们为一组参数(4个),故对于初始种群中的每个个体我们都采用64位二进制来表示。其中,1-16
位表示状态转移概率的信息素影响因子α的值,17-32位表示启发引导函数的影响因子β的
值,33-48位表示启发引导函数的系数λ的值,49-64位表示迭代次数N。
(2)目标函数的设计
根据以上设定的初始种群,我们每个个体对应的将是一组包括状态转移概率的信息素影
响因子α,启发引导函数的影响因子β,启发引导函数的系数λ,迭代次数N的一组参数。我
们通过对遗传算法随机产生的初始种群(即每个个体)进行解码,然后依据每个个体对应的一组参数对边缘提取进行蚁群算法的演化,最后必将得到一个迭代的最终结果,即图像边缘检测结果。现在的问题是,我们如何对得到的结果进行评价?从而选出那些得到满意边缘提取结果的优秀个体来进行交叉、变异、遗传操作而产生下一代种群,一代代的向最优边缘结果逼近?
上述问题(1) (2)正是目标函数设计要解决的问题,用目标函数来评价每个个体产生的最终边缘提取图像的效果。当个体对应的一组参数用于蚁群算法进行边缘提取得到最终边缘图像时,如果迭代出的边缘图像与原图像差异较小,即两幅图像基本相同的情况下,证明已经找到了目标物体的边缘了。因此,我们引入两幅图像的相似度std2值进行评价。
目标函数表示为:Objv=std2 (U),其中U表示为迭代出的边缘图像与原图像的能量差.即。
如图所示结合遗传算法的蚁群边缘检测系统流程图:
图3.结合遗传算法进行图像边缘检测流程
如图所示蚁群边缘检测算法的运行界面:
图 3.蚁群边缘算法运行界面
4 实验仿真
我们设置参数范围分别为:α为1-5,β为0-2,λ为1-30,迭代次数N为1-9,目标函数
采用提取的边缘矩阵和原图矩阵之间的方差。设定的种群大小为10,种群的遗传代数为100。
该实验中随机产生的第一代种群的数据如表4.1所示,经过100代遗传后的详细数据如表4.2所示。
表4.1随机产生第一代种群值及目标函数值
表4.2遗传至第100代种群值及目标函数值
从表4.1可以看到α, β, λ,N在第一代遗传,出现了变异,数据不稳定。表4.2可以看出,α, β, λ,N经过100代遗传后基本处于稳定状态。因此,依据本算法得到的最优参数值α, β, λ,N以及迭代次数分别为:4.8387、0.9428、26.833、3.120237(迭代
次数取近似的整数计算)。
将上述遗传得到的参数应用进蚁群边缘检测中,本实验首先利用四个启发引导函数:,,,
作为信息素启发能见度的函数,并且计算蚁群容许行走范围内的转移概率函数,采用信息素矩阵排序选取阈值提取边缘。
图4.1结合遗传算法的蚁群边缘检测效果
图4.2蚁群边缘检测(人工选取参数)效果
图4.1提取车牌边缘实验利用遗传算法得到的参数^α, β, λ,N(4.8387、0.9428、
26.833、3.120237)提取车牌边缘效果较好,边缘清晰。图4.2是蚁群边缘检测人工选取参数的效果。对比两幅图能够看出利用遗传算法得到的参数应用于蚁群算法是可行的。
图4.3 血细胞对比图
图4.3提取血细胞边缘同样利用遗传得到的参数对血细胞进行边缘提取,对比人工选参提取边缘平滑完整,细节清晰。
因此,将遗传算法与蚁群算法结合使用,减少了人工选参的繁琐不稳定等现象,边缘提取完整细节清晰。
5结语
大量实验结果表明,我们在蚁群算法领域所做的以上工作,大大提高了基本蚁群算法的性能,减少了人工选参的繁琐不稳定等现象。当然,我们在蚁群算法这个领域所做的工作还是远远不够的,我们根据我们对蚁群算法的研究,提出对其进一步研究工作中需要解决的问题,给出了解决这些问题的基本思路,为该领域的研究作了一些基础性工作.总之,蚁群算法的性能改进、理论基础证明、并行化以及蚁群算法在其他新领域如组合优化、函数优化、系统辨识、机器人路径规划、数据挖掘等方面的应用,仍然需要我们投入更广泛更深入的研究。
基本蚁群算法
蚁群算法浅析 摘要:介绍了什么是蚁群算法,蚁群算法的种类,对四种不同的蚁群算法进行了分析对比。详细阐述了蚁群算法的基本原理,将其应用于旅行商问题,有效地解决了问题。通过对旅行商问题C++模拟仿真程序的详细分析,更加深刻地理解与掌握了蚁群算法。 关键词:蚁群算法;旅行商问题;信息素;轮盘选择 一、引言 蚁群算法(Ant Colony Optimization, ACO),是一种用来在图中寻找优化路径的算法。它由Marco Dorigo于1992年在他的博士论文中提出,其灵感来源于蚂蚁在寻找食物过程中发现路径的行为。蚁群算法是一种模拟进化算法,初步的研究表明该算法具有许多优良的性质。 蚁群算法成功解决了旅行商问题(Traveling Salesman Problem, TSP):一个商人要到若干城市推销物品,从一个城市出发要到达其他各城市一次而且最多一次最后又回到第一个城市。寻找一条最短路径,使他从起点的城市到达所有城市一遍,最后回到起点的总路程最短。若把每个城市看成是图上的节点,那么旅行商问题就是在N个节点的完全图上寻找一条花费最少的回路。 最基本的蚁群算法见第二节。目前典型的蚁群算法有随机蚁群算法、排序蚁群算法和最大最小蚁群算法,其中后两种蚁群算法是对前一种的优化。本文将终点介绍随机蚁群算法。 二、基本蚁群算法 (一)算法思想 各个蚂蚁在没有事先告诉他们食物在什么地方的前提下开始寻找食物。当一只找到食物以后,它会向环境释放一种信息素,信息素多的地方显然经过这里的蚂蚁会多,因而会有更多的蚂蚁聚集过来。假设有两条路从窝通向食物,开始的时候,走这两条路的蚂蚁数量同样多(或者较长的路上蚂蚁多,这也无关紧要)。当蚂蚁沿着一条路到达终点以后会马上返回来,这样,短的路蚂蚁来回一次的时间就短,这也意味着重复的频率就快,因而在单位时间里走过的蚂蚁数目就多,洒下的信息素自然也会多,自然会有更多的蚂蚁被吸引过来,从而洒下更多的信息素。因此,越来越多地蚂蚁聚集到较短的路径上来,最短的路径就找到了。 蚁群算法的基本思想如下图表示:
蚁群算法
蚁群算法 目录 1 蚁群算法基本思想 (1) 1.1蚁群算法简介 (1) 1.2蚁群行为分析 (1) 1.3蚁群算法解决优化问题的基本思想 (2) 1.4蚁群算法的特点 (2) 2 蚁群算法解决TSP问题 (3) 2.1关于TSP (3) 2.2蚁群算法解决TSP问题基本原理 (3) 2.3蚁群算法解决TSP问题基本步骤 (5) 3 案例 (6) 3.1问题描述 (6) 3.2解题思路及步骤 (6) 3.3MATLB程序实现 (7) 3.1.1 清空环境 (7) 3.2.2 导入数据 (7) 3.3.3 计算城市间相互距离 (7) 3.3.4 初始化参数 (7) 3.3.5 迭代寻找最佳路径 (7) 3.3.6 结果显示 (7) 3.3.7 绘图 (7)
1 蚁群算法基本思想 1.1 蚁群算法简介 蚁群算法(ant colony algrothrim,ACA)是由意大利学者多里戈(Dorigo M)、马聂佐(Maniezzo V )等人于20世纪90初从生物进化的机制中受到启发,通过模拟自然界蚂蚁搜索路径的行为,提出来的一种新型的模拟进化算法。该算法用蚁群在搜索食物源的过程中所体现出来的寻优能力来解决一些系统优化中的困难问题,其算法的基本思想是模仿蚂蚁依赖信息素,通过蚂蚁间正反馈的方法来引导每个蚂蚁的行动。 蚁群算法能够被用于解决大多数优化问题或者能够转化为优化求解的问题,现在其应用领域已扩展到多目标优化、数据分类、数据聚类、模式识别、电信QoS管理、生物系统建模、流程规划、信号处理、机器人控制、决策支持以及仿真和系统辩识等方面。 蚁群算法是群智能理论研究领域的一种主要算法。 1.2 蚁群行为分析 B m=20 t=0 m=10 m=10 t=1
基于仿生学智能计算论文
基于仿生学的智能计算浅谈 摘要:本文介绍了仿生学智能计算的自然及数学原理,同时分析了基于仿生学的智能计算的几种经典的算法,最后就仿生学智能计算的发展方向提出了一点个人见解。 关键词:仿生;智能;算法;蚁群算法;遗传算法;人工神经网络 中图分类号:tp183 文献标识码:a 文章编号:1007-9599 (2011) 22-0000-01 intelligent computing based on bionics zhang guangshun (school of information science,jiujiang university,jiujiang 332005,china) abstract:this paper describes bionics intelligent computing and mathematical principles of natural,simultaneous analysis of intelligence based on bionic algorithm for the calculation of several classic,and finally the development of intelligent computing the direction of bionics made a personal opinion. keywords:bionic;intelligent;algorithm;ant colony algorithm;genetic algorithm;artificial neural network 一、仿生学智能计算的原理 (一)自然原理。达尔文在进化论中提出,大自然中的生物“物
蚁群算法相关概念
蚁群算法,PSO算法以及两种算法可以融合的几种方法 蚁群算法(ACO)是受自然界中蚂蚁搜索食物行为的启发,是一种群智能优化算法。它基于对自然界真实蚁群的集体觅食行为的研究,模拟真实的蚁群协作过程。算法由若干个蚂蚁共同构造解路径,通过在解路径上遗留并交换信息素提高解的质量,进而达到优化的目的。蚁群算法作为通用随机优化方法,已经成功的应用于TSP等一系列组合优化问题中,并取得了较好的结果。但由于该算法是典型的概率算法,算法中的参数设定通常由实验方法确定,导致方法的优化性能与人的经验密切相关,很难使算法性能最优化。 蚁群算法中每只蚂蚁要选择下一步所要走的地方,在选路过程中,蚂蚁依据概率函数 选择将要去的地方,这个概率取决于地点间距离和信息素的强度。(t+n) = (t)+ Δ (t+n) 上述方程表示信息素的保留率,1-表示信息素的挥发率,为了防止信息的无限积累,取值范围限定在0~1。Δ ij 表示蚂蚁k在时间段t到(t +n)的过程中,在i到j的路径上留下的残留信息浓度。
在上述概率方程中,参数α和β:是通过实验确定的。它们对算法性能同样有很大的影响。α值的大小表明留在每个节点上信息量受重视的程度,其值越大,蚂蚁选择被选过的地点的可能性越大。β值的大小表明启发式信息受重视的程度。 这两个参数对蚁群算法性能的影响和作用是相互配合,密切相关的。但是这两个参数只能依靠经验或重复调试来选择。 在采用蚁群-粒子群混合算法时,我们可以利用PSO对蚁群系统参数α和β的进行训练。 具体训练过程:假设有n个粒子组成一个群落,其中第i个粒子表示为一个二维的向量xi = ( xi1 , xi2 ) , i = 1, 2, ?,n,即第i个粒子在搜索空间的中的位置是xi。换言之,每个粒子的位置就是一个潜在的解。将xi带入反馈到蚁群系统并按目标函数就可以计算出其适应值,根据适应值的大小衡量解的优劣。 蚁群算法的优点: 蚁群算法与其他启发式算法相比,在求解性能上,具有很强的鲁棒性(对基本蚁群算法模型稍加修改,便可以应用于其他问题)和搜索较好解的能力。 蚁群算法是一种基于种群的进化算法,具有本质并行性,易于并行实现。 蚁群算法很容易与多种启发式算法结合,以改善算法性能。
浅谈电网规划评价与决策
浅谈电网规划评价与决策 电网规划是电力系统发展的基础,其规划水平的高低直接影响到未来电网的安全性、可靠性与经济性等方面。电网规划评价与决策工作是其中的重要内容,关系到电网规划的质量与水平。因此,电网规划评价与决策研究工作就显得尤为重要,文章针对电网规划评价与决策方法进行了研究,以期给同行参考。 标签:电网规划;评价;决策 引言 随着社会经济的不断进步,电能已经触及到了人类生活的各个方面。只有通过电力工业本身的基本建设从而不断扩大电力系统的规模才能满足社会对电能的需求。因此做好电力工程建设的前期工作,落实发、送、变电本体工程的建设条件,协调其建设进度,优化其设计方案,其意义尤为重大。而电网规划正是其中一个重要的环节,一个规划方案的好坏直接关系到电能能否从发电厂顺利送到用户。因此,提高电网规划的质量具有重大的理论与现实意义。 1 电网规划研究 电网规划研究主要有两个方面的任务:一是确定电网未来安装设备规格,如导线电压等级及型号、变压器规格等;二是确定电网中增加新设备的地点及时刻。电网规划的目的是确定电网合理扩展网架,寻找最优的扩展方案,且满足负荷、用户供电质量、城市规划协调一致、经济发展四个方面的要求。因此电网规划是一个多目标、多变量、多约束的混合非线性规划问题。国内外研究人员针对其特点进行了大量的研究,并取得了一定成果。人们对电网规划问题研究的不同之处主要表现在数学模型和优化方法两方面。 2 规划模型的建立 由于电网规划的复杂性与系统性,需要考虑的因素多种多样,建立合理与完整的规划模型是一个重要的课题。文献[1]针对传统规划中未考虑各线路负荷水平问题,将输电线路投资和网络剩余输电容量作为目标函数,求取投资最小下剩余输电容量最大的方案。文献[2]在模型中加入了发电备用容量以满足电力系统实际运行要求。文献[3]同时考虑了电力市场阻塞和线路剩余容量建立新的电网规划模型,并采用粒子群算法进行求解。文献[4]建立了主网与配网相协调的电网规划模型,并将地理信息系统和图论应用到规划中。 3 优化算法的选择 除了提出不同的电网规划模型外,电网规划研究者也对优化算法展开大量的研究,以期提高计算速度和改善算法收敛性。目前,用于电网规划的优化算法主要包括两类:数学优化方法和智能优化方法。
蚁群算法简述及实现
蚁群算法简述及实现 1 蚁群算法的原理分析 蚁群算法是受自然界中真实蚁群算法的集体觅食行为的启发而发展起来的一种基于群体的模拟进化算法,属于随机搜索算法,所以它更恰当的名字应该叫“人工蚁群算法”,我们一般简称为蚁群算法。M.Dorigo等人充分的利用了蚁群搜索食物的过程与著名的TSP问题的相似性,通过人工模拟蚁群搜索食物的行为来求解TSP问题。 蚂蚁这种社会性动物,虽然个体行为及其简单,但是由这些简单个体所组成的群体却表现出及其复杂的行为特征。这是因为蚂蚁在寻找食物时,能在其经过的路径上释放一种叫做信息素的物质,使得一定范围内的其他蚂蚁能够感觉到这种物质,且倾向于朝着该物质强度高的方向移动。蚁群的集体行为表现为一种正反馈现象,蚁群这种选择路径的行为过程称之为自催化行为。由于其原理是一种正反馈机制,因此也可以把蚁群的行为理解成所谓的增强型学习系统(Reinforcement Learning System)。 引用M.Dorigo所举的例子来说明蚁群发现最短路径的原理和机制,见图1所示。假设D 和H之间、B和H之间以及B和D之间(通过C)的距离为1,C位于D和B的中央(见图1(a))。现在我们考虑在等间隔等离散世界时间点(t=0,1,2……)的蚁群系统情况。假设每单位时间有30只蚂蚁从A到B,另三十只蚂蚁从E到D,其行走速度都为1(一个单位时间所走距离为1),在行走时,一只蚂蚁可在时刻t留下浓度为1的信息素。为简单起见,设信息素在时间区间(t+1,t+2)的中点(t+1.5)时刻瞬时完全挥发。在t=0时刻无任何信息素,但分别有30只蚂蚁在B、30只蚂蚁在D等待出发。它们选择走哪一条路径是完全随机的,因此在两个节点上蚁群可各自一分为二,走两个方向。但在t=1时刻,从A到B的30只蚂蚁在通向H的路径上(见图1(b))发现一条浓度为15的信息素,这是由15只从B走向H的先行蚂蚁留下来的;而在通向C的路径上它们可以发现一条浓度为30的信息素路径,这是由15只走向BC的路径的蚂蚁所留下的气息与15只从D经C到达B留下的气息之和(图1(c))。这时,选择路径的概率就有了偏差,向C走的蚂蚁数将是向H走的蚂蚁数的2倍。对于从E到D来的蚂蚁也是如此。 (a)(b)(c) 图1 蚁群路径搜索实例 这个过程一直会持续到所有的蚂蚁最终都选择了最短的路径为止。 这样,我们就可以理解蚁群算法的基本思想:如果在给定点,一只蚂蚁要在不同的路径中选择,那么,那些被先行蚂蚁大量选择的路径(也就是信息素留存较浓的路径)被选中的概率就更大,较多的信息素意味着较短的路径,也就意味着较好的问题回答。
蚁群算法
蚁群算法报告及代码 一、狼群算法 狼群算法是基于狼群群体智能,模拟狼群捕食行为及其猎物分配方式,抽象出游走、召唤、围攻3种智能行为以及“胜者为王”的头狼产生规则和“强者生存”的狼群更新机制,提出一种新的群体智能算法。 算法采用基于人工狼主体的自下而上的设计方法和基 于职责分工的协作式搜索路径结构。如图1所示,通过狼群个体对猎物气味、环境信息的探知、人工狼相互间信息的共享和交互以及人工狼基于自身职责的个体行为决策最终实现了狼群捕猎的全过程。 二、布谷鸟算法 布谷鸟算法 布谷鸟搜索算法,也叫杜鹃搜索,是一种新兴启发算法CS 算法,通过模拟某些种属布谷鸟的寄生育雏来有效地求解最优化问题的算法.同时,CS 也采用相关的Levy 飞行搜索机制 蚁群算法介绍及其源代码。 具有的优点:全局搜索能力强、选用参数少、搜索路径优、多目标问题求解能力强,以及很好的通用性、鲁棒性。 应用领域:项目调度、工程优化问题、求解置换流水车间调度和计算智能 三、差分算法 差分算法主要用于求解连续变量的全局优化问题,其主要工作步骤与其他进化算法基本一致,主要包括变异、交叉、选择三种操作。 算法的基本思想是从某一随机产生的初始群体开始,利用从种群中随机选取的两个个体
的差向量作为第三个个体的随机变化源,将差向量加权后按照一定的规则与第三个个体求和而产生变异个体,该操作称为变异。然后,变异个体与某个预先决定的目标个体进行参数混合,生成试验个体,这一过程称之为交叉。如果试验个体的适应度值优于目标个体的适应度值,则在下一代中试验个体取代目标个体,否则目标个体仍保存下来,该操作称为选择。在每一代的进化过程中,每一个体矢量作为目标个体一次,算法通过不断地迭代计算,保留优良个体,淘汰劣质个体,引导搜索过程向全局最优解逼近。 四、免疫算法 免疫算法是一种具有生成+检测的迭代过程的搜索算法。从理论上分析,迭代过程中,在保留上一代最佳个体的前提下,遗传算法是全局收敛的。 五、人工蜂群算法 人工蜂群算法是模仿蜜蜂行为提出的一种优化方法,是集群智能思想的一个具体应用,它的主要特点是不需要了解问题的特殊信息,只需要对问题进行优劣的比较,通过各人工蜂个体的局部寻优行为,最终在群体中使全局最优值突现出来,有着较快的收敛速度。为了解决多变量函数优化问题,科学家提出了人工蜂群算法ABC模型。 六、万有引力算法 万有引力算法是一种基于万有引力定律和牛顿第二定律的种群优化算法。该算法通过种群的粒子位置移动来寻找最优解,即随着算法的循环,粒子靠它们之间的万有引力在搜索空间内不断运动,当粒子移动到最优位置时,最优解便找到了。 GSA即引力搜索算法,是一种优化算法的基础上的重力和质量相互作用的算法。GSA 的机制是基于宇宙万有引力定律中两个质量的相互作用。 七、萤火虫算法 萤火虫算法源于模拟自然界萤火虫在晚上的群聚活动的自然现象而提出的,在萤火虫的群聚活动中,每只萤火虫通过散发荧光素与同伴进行寻觅食物以及求偶等信息交流。一般来说,荧光素越亮的萤火虫其号召力也就越强,最终会出现很多萤火虫聚集在一些荧光素较亮的萤火虫周围。人工萤火虫算法就是根据这种现象而提出的一种新型的仿生群智能优化算法。在人工萤火虫群优化算法中,每只萤火虫被视为解空间的一个解,萤火虫种群作为初始解随机的分布在搜索空间中,然后根据自然界萤火虫的移动方式进行解空间中每只萤火虫的移动。通过每一代的移动,最终使的萤火虫聚集到较好的萤火虫周围,也即是找到多个极值
4蚁群算法的基本思想
蚁群算法的基本思想 一、引言 蚁群算法(Ant Colony Optimization, ACO),是一种用来在图中寻找优 化路径的算法。它由Marco Dorigo于1992年在他的博士论文中提出,其灵感 来源于蚂蚁在寻找食物过程中发现路径的行为。蚁群算法是一种模拟进化算法,初步的研究表明该算法具有许多优良的性质。 蚁群算法成功解决了旅行商问题(Traveling Salesman Problem, TSP):一个商人要到若干城市推销物品,从一个城市出发要到达其他各城市一次而且 最多一次最后又回到第一个城市。寻找一条最短路径,使他从起点的城市到达 所有城市一遍,最后回到起点的总路程最短。若把每个城市看成是图上的节点,那么旅行商问题就是在N个节点的完全图上寻找一条花费最少的回路。 二、基本蚁群算法 (一)算法思想 各个蚂蚁在没有事先告诉他们食物在什么地方的前提下开始寻找食物。当 一只找到食物以后,它会向环境释放一种信息素,信息素多的地方显然经过这 里的蚂蚁会多,因而会有更多的蚂蚁聚集过来。假设有两条路从窝通向食物, 开始的时候,走这两条路的蚂蚁数量同样多(或者较长的路上蚂蚁多,这也无 关紧要)。当蚂蚁沿着一条路到达终点以后会马上返回来,这样,短的路蚂蚁 来回一次的时间就短,这也意味着重复的频率就快,因而在单位时间里走过的 蚂蚁数目就多,洒下的信息素自然也会多,自然会有更多的蚂蚁被吸引过来, 从而洒下更多的信息素。因此,越来越多地蚂蚁聚集到较短的路径上来,最短 的路径就找到了。 蚁群算法的基本思想如下图表示:
(二)算法描述 基本蚁群算法的算法简单描述如下: 1.所有蚂蚁遇到障碍物时按照等概率选择路径,并留下信息素; 2.随着时间的推移,较短路径的信息素浓度升高; 3.蚂蚁再次遇到障碍物时,会选 择信息素浓度高的路径; 4.较短路径的信息素浓度继续升高,最终最优路径 被选择出来。 三、随机蚁群算法 在基本蚁群算法中,蚂蚁会在多条可选择的路径中,自动选择出最短的一 条路径。但是,一旦蚁群选择了一条比之前短的路径,就会认为这条路径是最 好的,在这条路径上一直走下去。这样的算法存在问题:蚂蚁可能只是找到了 局部的最短路径,而忽略了全局最优解。 因此,在基本蚁群算法的基础上,需要对蚂蚁选路的方案加以改善:有些 蚂蚁并没有象其它蚂蚁一样总重复同样的路,他们会另辟蹊径,也就是它会按 照一定的概率不往信息素高的地方。如果令开辟的道路比原来的其他道路更短,
计算智能大作业--蚁群算法解决TSP问题
(计算智能大作业) 应用蚁群算法求解TSP问题
目录 蚁群算法求解TSP问题 (3) 摘要: (3) 关键词: (3) 一、引言 (3) 二、蚁群算法原理 (4) 三、蚁群算法解决TSP问题 (7) 四、解决n个城市的TSP问题的算法步骤 (9) 五、程序实现 (11) 六、蚁群算法优缺点分析及展望 (18) 七、总结 (18)
采用蚁群算法解决TSP问题 摘要:蚁群算法是通过蚂蚁觅食而发展出的一种新的启发算法,该算法已经成功的解决了诸如TSP问题。本文简要学习探讨了蚂蚁算法和TSP问题的基本内容,尝试通过matlab 仿真解决一个实例问题。 关键词:蚁群算法;TSP问题;matlab。 一、引言 TSP(Travelling Salesman Problem)又称货郎担或巡回售货员问题。TSP问题可以描述为:有N个城市,一售货员从起始城市出发,访问所有的城市一次,最后回到起始城市,求最短路径。TSP问题除了具有明显的实际意义外,有许多问题都可以归结为TSP问题。目前针对这一问题已有许多解法,如穷举搜索法(Exhaustive Search Method), 贪心法(Greedy Method), 动态规划法(Dynamic Programming Method)分支界定法(Branch-And-Bound),遗传算法(Genetic Agorithm)模拟退火法(simulated annealing),禁忌搜索。本文介绍了一种求解TSP问题的算法—蚁群算法,并通过matlab仿真求解50个城市之间的最短距离,经过仿真试验,证明是一种解决TSP问题有效的方法。
浅谈机器人的现在和未来
浅谈“机器人的现在和未来。” 本文扼要地介绍了智能机器人技术的发展现状,以及世界各国智能机器人的发展水平,然后介绍了智能机器人的分类,从几个典型的方面介绍了智能机器人在各行各业的广泛应用,讨论了智能机器人的发展趋势以及对未来技术的展望,最后提出了自己的建议和设想,分析我国在智能机器人方面发展并提出期望。 1、引言 机器人是一种可编程和多功能的,用来搬运材料、零件、工具的操作机,或是为了执行不同的任务而具有可改变和可编程动作的专门系统。智能机器人则是一个在感知-思维-效应方面全面模拟人的机器系统,外形不一定像人。它是人工智能技术的综合试验场,可以全面地考察人工智能各个领域的技术,研究它们相互之间的关系。还可以在有害环境中代替人从事危险工作、上天下海、战场作业等方面大显身手。一部智能机器人应该具备三方面的能力:感知环境的能力、执行某种任务而对环境施加影响的能力和把感知与行动联系起来的能力。智能机器人与工业机器人的根本区别在于,智能机器人具有感知功能与识别、判断及规划功能。 随着智能机器人的应用领域的扩大,人们期望智能机器人在更多领域为人类服务,代替人类完成更复杂的工作。然而,智能机器人所处的环境往往是未知的、很难预测。智能机器人所要完成的工作任务
也越来越复杂;对智能机器人行为进行人工分析、设计也变得越来越困难。目前,国内外对智能机器人的研究不断深入。 本文对智能机器人的现状和发展趋势进行了综述,分析了国内外的智能机器人的发展,讨论了智能机器人在发展中存在的问题,最后提出了对智能机器人发展的一些设想。 2、国内外在该领域的发展现状综述 2.1智能机器人的发展现状 智能机器人是第三代机器人,这种机器人带有多种传感器,能够将多种传感器得到的信息进行融合,能够有效的适应变化的环境,具有很强的自适应能力、学习能力和自治功能。 目前研制中的智能机器人智能水平并不高,只能说是智能机器人的初级阶段。智能机器人研究中当前的核心问题有两方面:一方面是,提高智能机器人的自主性,这是就智能机器人与人的关系而言,即希望智能机器人进一步独立于人,具有更为友善的人机界面。从长远来说,希望操作人员只要给出要完成的任务,而机器能自动形成完成该任务的步骤,并自动完成它。另一方面是,提高智能机器人的适应性,提高智能机器人适应环境变化的能力,这是就智能机器人与环境的关系而言,希望加强它们之间的交互关系。 智能机器人涉及到许多关键技术,这些技术关系到智能机器人的智能性的高低。这些关键技术主要有以下几个方面:多传感信息耦合
用蚁群算法解决TSP问题
用蚁群算法解决TSP 问题 一、引言 蚁群算法是一种受自然界生物行为启发而产生的“自然”算法,产生于对蚂蚁行为的研究。蚁群中的蚂蚁以“信息素”为媒介,间接异步的相互联系。蚂蚁在行动中,会在他们经过的地方留下一些化学物质,称为“信息素”。这些物质能被同一种群众后来的蚂蚁感受到,并作为一种信号影响后者的行动,具体表现在后到的蚂蚁选择有这些物质的路径的可能性比选择没有这些物质的路径的可能性大的多。后者留下的信息素会对原有的信息素进行加强,并循环下去。这样,经过蚂蚁多的路径,后到蚂蚁选择这条路径的可能性就越来越大。由于在一定的时间内,越短的路径会被越多的蚂蚁访问,因而积累的信息素就越多,在下一个时间内被其他的蚂蚁选中的可能性也越大。这个过程会持续到所有的蚂蚁都走到最短的那一条路径为止。 二、关键技术 (1) 解的表达形式 在应用蚁群优化算法时,只需要建立一个虚拟的始终点,相当于蚁群的巢穴和食物所在地,这样一个所经过城市的路径的排列就构成了一个解; (2) 信息素的记忆和更新 在算法开始时,由于从来没有蚂蚁去寻找过路径,因此可以认为是没有任何先验信息,即每条路上的信息相等。客观地将,信息素应该都为0,但是由于在蚁群算法中,信息素决定了蚂蚁选择这条路径的概率,因此可以认 为初始信息素矩阵为:1/(*(1))0ij N N p -?=?? i j i j ≠=其中N 为城市数 当算法运行过程中,每次放出m 支蚂蚁,每只蚂蚁按照信息素选择路径,将其中路径最短的记录下来,对这条最短路进行信息素的加强;而对于其他路径,因为信息素的挥发,信息素浓度将会降低,更新后的信息素矩阵为: 11(1)//(1)/k ij k ij k ij p N p p ρρρ--?-+?=?-?? i j i j →→经过路径不经过路径其中N 为城市数,ρ为挥发系数 (3) 蚁群的规模 在一般应用中,蚁群中蚂蚁的个数m 是固定数,不超过TSP 图的节点数。
Matlab实现概率估计_matlab
Matlab实现概率估计_matlab 网站首页控制系统电子技术机械设计电气工程专业软件考研就业技术论坛PROTEUS | PROTEL | matlab | Solidworks | 组态软件 | labview | 电路图 | Eplan | cad - 当前位置:高校自动化网 >> matlab >> 浏览文章 Matlab实现概率估计 文章来源:不详作者:佚名 该文章讲述了Matlab实现概率估计. matlab的统计中有直接有的概率密度估计就是: ksdensity 核心平滑密度估计 [f,xi] = ksdensity(x) 计算样本x的概率密度估计,返回在xi点的概率密度f,此时我们使用plot(xi,f)就可以绘制出概率密度曲线。该函数,首先统计样本x在各个区间的概率(与hist有些相似),再自动选择xi,计算对应的xi点的概率密度 f = ksdensity(x,xi) 与上面的相似,只是这时xi我们帮选定了,ksdesity直接计算对应点的概率密度 当然ksdedity还有其他选项,这里不具体介绍,感兴趣的网友可以自己查看帮助,或者与我交流matlabsky@https://www.360docs.net/doc/211590921.html, %by dynamic %see also https://www.360docs.net/doc/211590921.html, %contact me matlabsky@https://www.360docs.net/doc/211590921.html, %2009.2.21 % %给一个随机样本 x=[randn(30,1); 5+randn(30,1)]; %计算出各点的概率密度
[f,xi]=ksdensity(x); %绘制 subplot(211) plot(x) title('样本数据(Sample Data)') subplot(212) plot(xi,f) title('概率密度分布(PDF)') 相关文章: Reading and writing .mat files with Python Matlab获取鼠标坐标值的ginput()函数 线性规划matlab实现 上一篇:aam算法的matlab程序和c语言程序下载 下一篇:MATLAB基本数学函数最近更新在ARM微处理器上实现Rijndael加密算法 objectARX 常用功能实现集合 高速以太网CRC校验的实现 转CRC算法原理及C语言实现 nios II 实验五数码管显示数字钟定时器实现 Matlab中单边谱FFT变换实现实例 触摸屏维修之故障分析 大功率直流电机调速电路 SMD元器件的符号阐述 Matlab C# Book 运算放大器连载一——如何避免振荡 电动机绕组的烘干方法 广告链接- 热门文章matlab7.0版2009下载及7.0序列号注册码 Matlab中如何编写S函数 matlab相关矩阵基本运算 Vista下如何安装Matlab
蚁群算法解决旅游线路问题
2011年第八届苏北数学建模联赛 承诺书 我们仔细阅读了第八届苏北数学建模联赛的竞赛规则。 我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与本队以外的任何人(包括指导教师)研究、讨论与赛题有关的问题。 我们知道,抄袭别人的成果是违反竞赛规则的, 如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。 我们郑重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。如有违反竞赛规则的行为,我们愿意承担由此引起的一切后果。 我们的参赛报名号为: 参赛组别(研究生或本科或专科): 本科组 参赛队员(签名) : 队员1:唐文辉 队员2:徐玲 队员3:涂杰 获奖证书邮寄地址:
摘要 本文就旅游线路的优化设计问题,根据旅游者在旅行中的旅游时间,旅游费用,旅游地点,交通状况,住宿等因素的约束,借助图论,蚁群算法,建立最优化数学模型。在最短路路线的基础上,综合考虑交通,用费,时间对问题(2)、(3)、(4)、(5)的影响,给出旅游路线,并用lingo程序对结论进行检验,确保结论的全局最优性。 针对问题(1),首先,由城市经纬度建立城市和城市之间距离的有向图图论模型,在建立图论模型的基础上,建立在城市之间距离矩阵,采用蚁群算法,得到一条最短闭合路线。根据最短路线,查找合适时间的车次,距车站或景点一定范围内的最便宜的宾馆,达到费用最小。结合实际,得出最优路线:徐州->常州->舟山->黄山->庐山->武汉->洛阳->西安->祁县->北京->青岛->徐州,得到行程表和旅游最小费用3551元。 针对问题(2),采用衔接最得当,城市间交通时间和最少的交通方式,由此找出交通方式的时间最优化配置,进而得到最优路线:徐州->舟山->黄山->武汉->九江->常州->洛阳->西安->祁县->青岛->北京->徐州,并得到行程表和最短旅游时间9天。 针对问题(3)在问题(1)的基础上,对每个旅游景区最短停留时间,门票费用加权赋值建立权向量。运用层次分析法,分别求出权重。根据权重,分别求出每个景点综合花销。在2000元旅费的限制下,在最短路线上删除耗时长,费用高的城市。重新查找删去城市后城市间的交通费,得到旅游行程表和最多旅游景点7个,旅行线路:徐州->青岛->北京->祁县->西安->洛阳->武汉->九江。 针对问题(4),在基于问题(2)的结果下,首先,将问题(2)中停留时间(离开时刻与到达时刻之差)较长的城市从路线中删除,直到满足小于5天为止。重新查找删去城市后城市间的交通时间,对路线进行微调后,得到旅游行程表和最多旅游景点7个,分别是:徐州->北京->青岛->祁县->西安->洛阳->武汉->常州->徐州。 针对问题(5),对问题(3)和问题(4)综合考虑,找出其中时间相对长,旅游费用相对大的城市,进行排名并逐个剔除,并做适当调整。当满足条件时,得出行程表和费时5天、总费用1798元的结论,具体路线:徐州->北京->青岛->祁县->西安->洛阳->常州->徐州。 最后,对模型的优缺点进行了分析,提出改进方案。 关键字:TSP问题蚁群lingo 最优 1问题重述 江苏徐州有一位旅游爱好者打算现在的今年的五月一日早上8点之后出发,到全国一些著名景点旅游,最后回到徐州。他预选了十个省市旅游景点,如表1
浅谈机械优化设计方法
浅谈机械优化设计方法 发表时间:2019-08-29T14:17:25.640Z 来源:《基层建设》2019年第16期作者:钟文 [导读] 摘要:伴随着我国的经济发展越来越快,无疑给可优化性能设计带来巨大的挑战。 深圳市海目星激光智能装备股份有限公司 518110 摘要:伴随着我国的经济发展越来越快,无疑给可优化性能设计带来巨大的挑战。机械优化设计是近几年来发展起来的一门新的学科,在二十世纪中旬的时候开始,优化技术和计算机技术的兴起,在每个设计领域中被应用,为工程设计提供了重要的科学的设计方法。因此,对机械设计的优化方法加以分析,吸取精华,紧跟时代步伐,与国际同步,才能增强制造业在我国市场中的竞争压力。 关键词:机械;优化设计;方法特点 引言 当今是一个信息化的社会,科技发展速度非常快,人们对多功能产品不仅有强烈的需求,也需要产品必须具备相应的功能,可靠性优化设计由此应运而生,已经取得了飞速发展和广泛应用,即以时间、费用和性能为基础,将产品能得以可靠使用作为优先考虑的设计准则,进行设计和生产可靠的性能要求。因此,可靠性设计是诸多学科和技术的交融而新兴的一种技术。 1 机械优化的概述 机械优化是顺应时代发展而不断延伸出来的一种现代化的生产而发展兴起的。它是建立在数学规划的理论和计算通过有效的实验数据和科学的评价体系来从众多的设计方案中寻找到能够尽可能的完善和适宜的设计方案,在这机械优化的这个机械方面的研究和应用的发展速度都是非常的快速,并且在快速发展的过程中取得了非常显著的效果。 2 机械设计优化方法的分类及特点 2.1 无约束优化设计法 无约束优化设计是没有约束函数的优化设计。无约束可以分为两类,一类是利用目标函数的一阶或二阶导数的无约束优化方法;另一类是只利用目标函数值的无约束优化方法。 2.2 约束优化设计法 优化设计问题大多数是约束的优化问题,根据处理约束条件方法的不同可分为直接法和间接法。直接法常见的方法有复合形法、约束坐标轮换法和网络法等。其内涵是构造一个迭代过程,使每次的迭代点都在可行域中,同时逐步降低目标函数值,直到求得最优解。间接法常见的有惩罚函数法、增广乘子法。它是将约束优化问题转化成无约束优化问题,再通过无约束优化方法来求解,或者非线性优化问题转化成线性规划问题来处理。 2.3 遗传算法 遗传算法是一种非确定性的拟自然算法,它仿造自然界生物进化的规律,对一个随机产生的群体进行繁殖演变和自然选择,适者生存,不适者淘汰,如此循环往复,使群体素质和群体中个体的素质不断演化,最终收敛于全局最优解。最近几年中遗传算法在机械工程领域也开展了多方面的应用,主要表现在:机械结构优化设计;可靠性分析;故障诊断;参数辨识;机械方案设计。遗传算法尽管已解决了许多难题,但还存在许多问题,如算法本身的参数优化问题、如何避免过早收敛、如何改进操作手段或引入新的操作来提高算法的效率、遗传算法与其它优化算法的结合问题等。 2.4 蚁群算法 蚁群算法是受自然界中真实蚁群的集体行为的启发而提出的一种基于群体的模拟进化算法。蚁群算法对系统优化问题的数学模型没有很高的要求,只要可以显式表达即可,避免了导数等数学信息,使得优化过程更加简单,遍历性更好,适合非线性问题的求解。 2.5 模拟退火算法 模拟退火算法是一个全局最优算法,以优化问题的求解与物理系统退火过程的相似性为基础,适当的控制温度的下降过程实现模拟退火,从而达到求解全局优化问题的目的。模拟退火算法是一种通用的优化算法,用以求解不同的非线性问题;对不可微甚至不连续的函数优化,能以较大概率求得全局优化解;并且能处理不同类型的优化设计变量(离散的、连续的和混合型的);不需要任何的辅助信息,对目标函数和约束函数没有任何要求。 3机械优化设计过程中的设计方式 众所周知,在机械方面的设计都是非常的复杂困难的,要对机械进行优化设计面临的挑战也是非常大的,但是由于机械领域中优化形式十分的广泛,相关的研究人员根据优化运算的形式进行划分,主要分为准则优化,其次是线性规划,最后是非线性规划三种。其中准则优化是一种传统的优化方式,这种方式没有通过机械优化设计的数学理论方式进行优化,而是通过物理学方面的分析得出相应的结果,这样的方式得出的结论往往是具备一定的主观性的,但是这样的传统的优化设计方式具有的优点就是可以直观的看到优化的概念,并且这种优化设计的方式相对来说也是比较简单的,并且能够充分的发挥出目标函数的最大功效,并且非常的符合传统的工程需要,但是同样具有一定的缺点,就是在效率上始终优点偏低。 线性规划就是依据数学的基础进行优化的方式,同样线性规划是机械优化设计中最重要的设计方式,但是线性规划的优化设计方式在通过数学的理论上进行设计存在着很多的缺陷,就是在针对多函数的时候就不能充分的发挥出功效,还有就是在计算的过程中,十分的复杂,结算量非常的大,导致了在效率上有很大的缺陷,所以通常情况下,线性规则的优化设计方式都没有被采用。那么非线性规划的优化设计方式是整个生产和生活中应用最广泛的优化方式,并且能够有效的推进机械优化设计的发展,并且可以利用数学模式的计算将非线性规划分为两种,一种是没有约束的直接设计方式,就是在利用机械优化设计方案中以及存在的数据和再生的数据最为基础来进行合理的分析,进而得到最佳的效果,还有一种就是没有约束但是比较间接的方法,这种方式就是前者的方式的数学模式计算改变成了数学原理作为基础,通过利用函数的特性进行计算,从而得到最优的方式,这种方式在整个的机械优化设计中是非常重要的组成部分。 4机械设计优化方法的选择 根据优化设计问题的特点(如约束问题),选择适当的优化方法是非常关键的,因为同一个问题可以有多种方法,而有的方法可能会导致优化设计的结果不符合要求。选择优化方法有四个基本原则:效率要高、可靠性要高、采用成熟的计算程序、稳定性要好。另外选择适当的优化方法还需要个人经验,深入分析优化模型的约束条件、约束函数及目标函数,根据复杂性、准确性等条件对它们进行正确的选
蚁群算法的基本原理
2.1 蚁群算法的基本原理 蚁群优化算法是模拟蚂蚁觅食的原理,设计出的一种群集智能算法。蚂蚁在觅食过程中能够在其经过的路径上留下一种称之为信息素的物质,并在觅食过程中能够感知这种物质的强度,并指导自己行动方向,它们总是朝着该物质强度高的方向移动,因此大量蚂蚁组成的集体觅食就表现为一种对信息素的正反馈现象。某一条路径越短,路径上经过的蚂蚁越多,其信息素遗留的也就越多,信息素的浓度也就越高,蚂蚁选择这条路径的几率也就越高,由此构成的正反馈过程,从而逐渐的逼近最优路径,找到最优路径。 蚂蚁在觅食过程时,是以信息素作为媒介而间接进行信息交流,当蚂蚁从食物源走到蚁穴,或者从蚁穴走到食物源时,都会在经过的路径上释放信息素,从而形成了一条含有信息素的路径,蚂蚁可以感觉出路径上信息素浓度的大小,并且以较高的概率选择信息素浓度较高的路径。 (a) 蚁穴 1 2 食物源 A B (b) 人工蚂蚁的搜索主要包括三种智能行为: (1)蚂蚁的记忆行为。一只蚂蚁搜索过的路径在下次搜索时就不再被该蚂蚁选择,因此在蚁群算法中建立禁忌表进行模拟。 (2)蚂蚁利用信息素进行相互通信。蚂蚁在所选择的路径上会释放一种信息素的物质,当其他蚂蚁进行路径选择时,会根据路径上的信息素浓度进行选择,这样信息素就成为蚂蚁之间进行通信的媒介。 (3)蚂蚁的集群活动。通过一只蚂蚁的运动很难达到事物源,但整个蚁群进行搜索就完全不同。当某些路径上通过的蚂蚁越来越多时,路径上留下的信息素数量也就越多,导致信息素强度增大,蚂蚁选择该路径的概率随之增加,从而进一步增加该路径的信息素强度,而通过的蚂蚁比较少的路径上的信息素会随着时间的推移而挥发,从而变得越来越少。3.3.1蚂蚁系统 蚂蚁系统是最早的蚁群算法。其搜索过程大致如下: 在初始时刻,m 只蚂蚁随机放置于城市中, 各条路径上的信息素初始值相等,设为:0(0)ij ττ=为信息素初始值,可设0m m L τ=,m L 是由最近邻启发式方法构 造的路径长度。其次,蚂蚁(1,2,)k k m = ,按照随机比例规则选择下一步要转
蚁群算法
蚁群算法的改进与应用 摘要:蚁群算法是一种仿生优化算法,其本质是一个复杂的智能系统,它具有较强的鲁棒性、优良的分布式计算机制和易于与其他方法结合等优点。但是现在蚁群算法还是存在着缺点和不足,需要我们进一歩改进,如:搜索时间长、容易出现搜索停滞现象、数学基础还不完整。本文首先说明蚁群算法的基本思想,阐述了蚁群算法的原始模型及其特点,其次讨论如何利用遗传算法选取蚁群算法的参数,然后结合对边缘检测的蚁群算法具体实现过程进行研究分析,最后对本论文所做的工作进行全面总结,提出不足之处,并展望了今后要继续研究学习的工作内容。 关键词:蚁群算法;边缘检测;阈值;信息素;遗传算法; 1 前言 蚁群算法是近年来提出的一种群体智能仿生优化算法,是受到自然界中真实的蚂蚁群寻觅食物过程的启发而发现的。蚂蚁之所以能够找到蚁穴到食物之间的最短路径是因为它们的个体之间通过一种化学物质来传递信息,蚁群算法正是利用了真实蚁群的这种行为特征,解决了在离散系统中存在的一些寻优问题。该算法起源于意大利学者 Dorigo M 等人于 1991 年首先提出的一种基于种群寻优的启发式搜索算法,经观察发现,蚂蚁在寻找食物的过程中其自身能够将一种化学物质遗留在它们所经过的路径上,这种化学物质被学者们称为信息素。这种信息素能够沉积在路径表面,并且可以随着时间慢慢的挥发。在蚂蚁寻觅食物的过程中,蚂蚁会向着积累信息素多的方向移动,这样下去最终所有蚂蚁都会选择最短路径。该算法首先用于求解著名的旅行商问题(Traveling Salesman Problem,简称 TSP)并获得了较好的效果,随后该算法被用于求解组合优化、函数优化、系统辨识、机器人路径规划、数据挖掘、网络路由等问题。 尽管目前对 ACO 的研究刚刚起步,一些思想尚处于萌芽时期,但人们已隐隐约约认识到,人类诞生于大自然,解决问题的灵感似乎也应该来自大自然,因此越来越多人开始关注和研究 ACO,初步的研究结果已显示出该算法在求解复杂优化问题(特别是离散优化问题)方面的优越性。虽然 ACO 的严格理论基础尚未奠定,国内外的有关研究仍停留在实验探索阶段,但从当前的应用效果来看,这种自然生物的新型系统寻优思想无疑具有十分光明的前景。但该算法存在收敛速度慢且容易出现停滞现象的缺点,这是因为并不是所有的候选解都是最优解,而候选解却影响了蚂蚁的判断以及在蚂蚁群体中,单个蚂蚁的运动没有固定的规则,是随机的,蚂蚁与蚂蚁之间通过信息素来交换信息,但是对于较大规模的优化问题,这个信息传递和搜索过程比较繁琐,难以在较短的时间内找到一个最优的解。 由于依靠经验来选择蚁群参数存在复杂性和随机性,因此本文最后讨论如何利用遗传算法选取蚁群算法的参数。遗传算法得到的蚁群参数减少了人工选参的不确定性以及盲目性。 2 基本蚁群算法 2.1 蚁群算法基本原理 根据仿生学家的研究结果表明,单只蚂蚁不能找到从巢穴到食物源的最短路 径,而大量蚂蚁之间通过相互适应与协作组成的群体则可以,蚂蚁是没有视觉的,但是是通过蚂蚁在它经过的路径上留下一种彼此可以识别的物质,叫信息素,来相互传递信息,达到协作的。蚂蚁在搜索食物源的过程中,在所经过的路径上留下信息素,同时又可以感知并根据信息素的浓度来选择下一条路径,一条路径上的浓度越浓,蚂蚁选择该条路径的概率越大,并留下信息素使这条路径上的浓度加强,这样会有更多的蚂蚁选择次路径。相反,信息素浓度少的路
基于蚁群算法的旅行商问题解决方案
基于蚁群算法的旅行商问题解决方案 一引言 旅行商问题(TSP, Traveling Salesman Problem)是在1859年由威廉·汉密尔顿爵士首次提出的,它是物流领域中的典型问题,这个问题的求解具有十分重要的理论和现实意义。所谓TSP问题是指:有N个城市,要求旅行商到达每个城市各一次,且仅一次,并回到起点,且要求旅行路线最短。这是一个典型的优化问题,对一个具有中等顶点规模的图来说,精确求解也是很复杂的,计算量随着城市个数的增加而呈指数级增长,即属于所谓的NP问题。TSP在工程领域有着广泛的应用,并常作为比较算法性能的标志。如网络通讯、货物运输、电气布线、管道铺设、加工调度、专家系统、柔性制造系统等方面,都是TSP广泛应用的领域。求解算法包括贪婪法(GM)、极小代数法(MA)、模拟退火法(SA)和遗传算法(GA)等。而应用蚁群算法求解旅行商问题是近年来研究的新方向,由于其并行性与分布性,特别适用于大规模启发式搜索,实验结果证明了其可行性和有效性。 二蚁群系统基本原理 在蚂蚁群找到食物时,它们总能找到一条从食物到巢穴之间的最优路径。这是因为蚂蚁在寻找路径时会在路径上释放出一种特殊的信息素(phero-mone)。当它们碰到一个还没有走过的路口时,就随机地挑选一条路径前行。与此同时释放出与路径长度有关的信息素。路径越长,释放的激素浓度越低。当后来的蚂蚁再次碰到这个路口的时候,选择激素浓度较高路径概率就会相对较大。这样形成了一个正反馈。最优路径上的激素浓度越来越大,而其它的路径上激素浓度却会随着时间的流逝而消减。最终整个蚁群会找出最优路径。在整个寻径过程中,虽然单个蚂蚁的选择能力有限,但是通过激素的作用,整个蚁群之间交换着路径信息,最终找出最优路径。 三基于蚁群算法的旅行商问题求解方案 TSP问题描述如下: 设有n个城市C=(1,2,...,n),任意两个城市i,j之间的距离为d ij ,求一条经过每个城市的路径π=(π(1),π(2),...,π(n)),使得距离最小。