机械原理课程设计连杆机构b完美版

机械原理课程设计
任务书
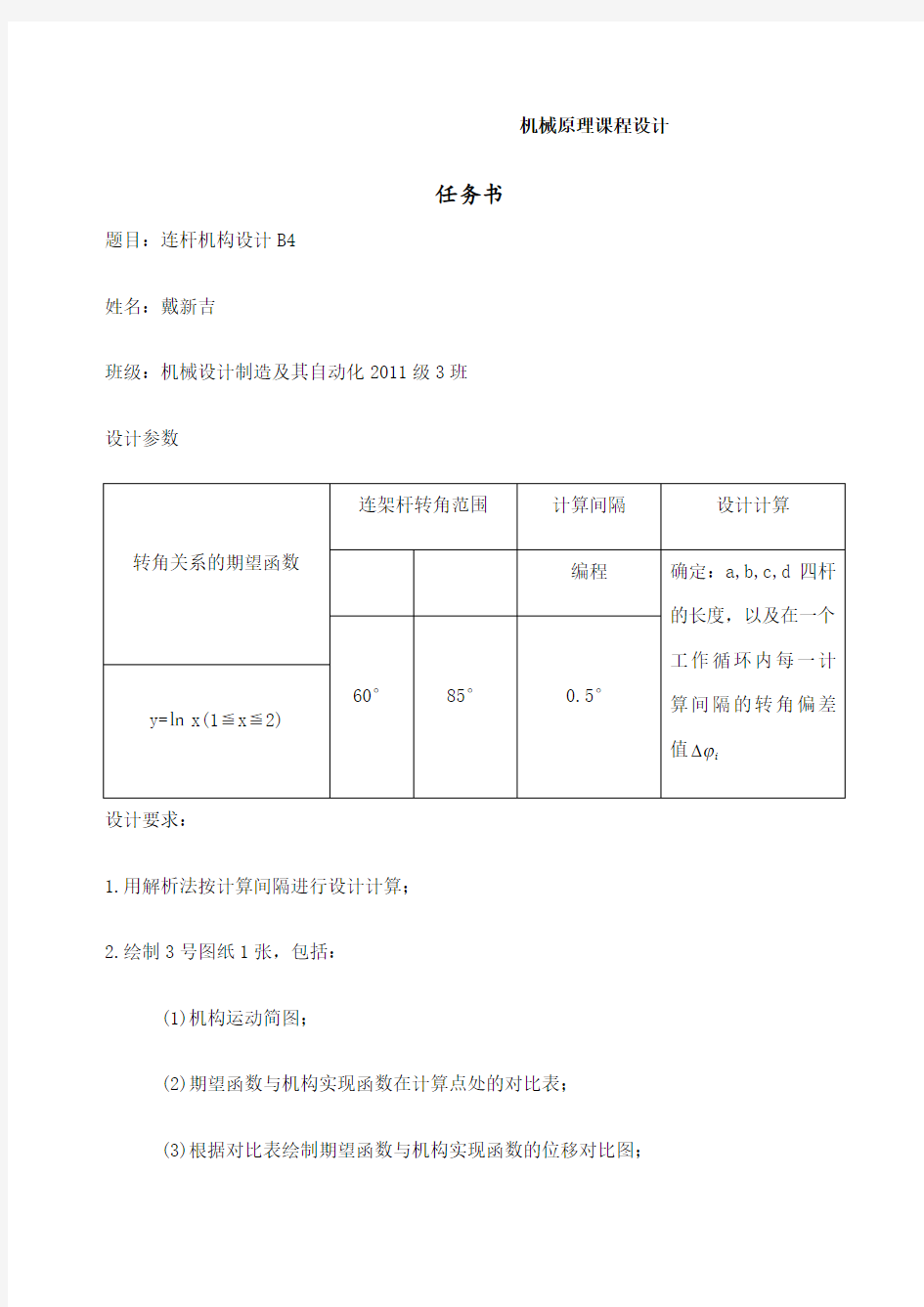
题目:连杆机构设计B4
姓名:戴新吉
班级:机械设计制造及其自动化2011级3班
设计参数
设计要求:
1.用解析法按计算间隔进行设计计算;
2.绘制3号图纸1张,包括:
(1)机构运动简图;
(2)期望函数与机构实现函数在计算点处的对比表;
(3)根据对比表绘制期望函数与机构实现函数的位移对比图;
3.设计说明书一份;
4.要求设计步骤清楚,计算准确。说明书规范。作图要符合国家标。按时独立完成任务。
目录
第1节平面四杆机构设计............................................
1.1连杆机构设计的基本问题...........................................
1.2作图法设计四杆机构 (3)
1.3作图法设计四杆机构的特点 (3)
1.4解析法设计四杆机构 (3)
1.5解析法设计四杆机构的特点 (3)
第2节设计介绍....................................................
2.1按预定的两连架杆对应位置设计原理 ................................
2.2 按期望函数设计..................................................
第3节连杆机构设计................................................
3.1连杆机构设计.....................................................
3.2变量和函数与转角之间的比例尺 (8)
3.3确定结点值 (8)
3.4 确定初始角0α、0? ............................................. 9 3.5 杆长比m,n,l 的确定 .............................................. 3.6 检查偏差值?? ...................................................
3.7 杆长的确定 .................................................... 13 3.8 连架杆在各位置的再现函数和期望函数最小差值??的确定 .. (15)
总结 ................................................................ 参考文献 ............................................................ 附录 ................................................................
第1节 平面四杆机构设计
1.1连杆机构设计的基本问题
连杆机构设计的基本问题是根据给定的要求选定机构的型式,确定各构件的尺寸,
同时还要满足结构条件(如要求存在曲柄、杆长比恰当等)、动力条件(如适当的传动角等)和运动连续条件等。
根据机械的用途和性能要求的不同,对连杆机构设计的要求是多种多样的,但这
些设计要求可归纳为以下三类问题:
(1)预定的连杆位置要求; (2)满足预定的运动规律要求;
(3)满足预定的轨迹要求;
连杆设计的方法有:解析法、作图法和实验法。
1.2 作图法设计四杆机构
对于四杆机构来说,当其铰链中心位置确定后,各杆的长度
也就确定了。用作图法进行设计,就是利用各铰链之间相对运动
的几何关系,通过作图确定各铰链的位置,从而定出各杆的长度。
1.3 作图法设计四杆机构的特点
图解法的特点是直观、简单、快捷,对三个设计位置以下的设计是十分方便的,其设计精度也能满足工作的要求,并能为解析法精确求解和优化设计提供初始值。
根据设计要求的不同分为四种情况:
(1) 按连杆预定的位置设计四杆机构;
(2) 按两连架杆预定的对应角位移设计四杆机构;
(3) 按预定的轨迹设计四杆机构;
(4) 按给定的急回要求设计四杆机构。
1.4 解析法设计四杆机构
在用解析法设计四杆机构时,首先需建立包含机构各尺度参数和运动变量在内的解析式,然后根据已知的运动变量求机构的尺度参数。
1.5 解析法设计四杆机构的特点
解析法的特点是可借助于计算器或计算机求解,计算精度高,是英语对三个或三个以上位置设计的求解,尤其是对机构进行优化设计和精度分析十分有利。
现有三种不同的设计要求,分别是:
(1) 按连杆预定的连杆位置设计四杆机构
(2) 按预定的运动轨迹设计四杆机构
(3) 按预定的运动规律设计四杆机构
1) 按预定的两连架杆对应位置设计
2) 按期望函数设计
本文详细阐述了解析法设计丝杆机构中按期望函数设计的原理、方法及过程。
第2节设计介绍
2.1按预定的两连架杆对应位置设计原理
如下图所示:
)
设要求从动件3与主动件1的转角之间满足一系列的对应位置关系,即θ
i
3=)(
1θ
i
f i=1,
2,… ,n ,其函数的运动变量
θ
i
为机构的转角,由设计要求知
θ1
、θ
3
为已知条件,仅
θ
2
为未知。又因为机构按比例放大或缩小,不会改变各机构的相对角度关系,故设计变量应该为各构件的相对长度,如取d/a=1 , b/a=l c/a=m , d/a=n 。故设计变量l 、m 、n 以及
θ1
、θ
3
的计量起始角0α、0?共五个。如图2-1所示建立坐标系Oxy ,并把各杆矢量向
坐标轴投影,可得
为消去未知角
θ
i
2,将式2—1)2cos()()cos()cos(30
301n n m m i
i i -+=+θ?θαθ令
p
=m,
p
1
=-m/n,
p
2
=2/()1(2
22l n m -++ 式 2-2 中包含5个待定参数
p
、
p 1
、p
2
、
α
、及?0
,故四杆机构最多可以按
两连架杆的5个对应位置精度求解。当两连架杆的对应位置数5>N 时,一般不能求得精确解,此时可用最小二乘法等进行近似设计。当要求的两连架杆对应位置数5 N N -=50个尺度参数,此时有无穷多解。 y x 2.2 按期望函数设计 如上图所示,设要求设计四杆机构两连架杆转角之间实现的函数关系)(x f y = (成为期望函数),由于连架杆机构的待定参数较少,故一般不能准确实现该期望函数。设实际实现的函数为月)(x F y =(成为再现函数),再现函数与期望函数一般是不一致的。设计时应该使机构的再现函数尽可能逼近所要求的期望函数。具体作法是:在给定的自变量x 的变化区间x 0到x m 内的某点上,使再现函数与期望函数的值相等。从几何意义上)(x F y =与 )(x f y =两函数曲线在某些点相交。 这些点称为插值结点。显然在结点处有: 故在插值结点上,再现函数的函数值为已知。这样,就可以按上述方法来设计四杆机构。这种设计方法成为插值逼近法。 在结点以外的其他位置,)(x F y =与)(x f y =是不相等的,其偏差为 偏差的大小与结点的数目及其分布情况有关,增加插值结点的数目,有利于逼近精度的提高。但结点的数目最多可为5个。至于结点位置分布,根据函数逼近理论有 m i x x x x x m m i 2)12(cos )(21)(2100π---+= (2-3) 试中m m i ,,,3,2,1Λ=为插值结点数。 本节介绍了采用期望函数设计四杆机构的原理。在第3节将 具体阐述连杆机构的设计。 第3节 连杆机构设计 3.1连杆机构设计 设计参数表 注:本次采用编程计算,计算间隔为0.5° 3.2变量和函数与转角之间的比例尺 根据已知条件y=㏑x(1≦x ≦2)为铰链四杆机构近似的实现期望函数, 设计步骤如下: (1)根据已知条件10=x ,2=x m ,可求得00 =y ,693.0=y m 。 (2)由主、从动件的转角范围m α=60°、m ?=85°确定自变量和函数与转角之间的比例尺分别为: ?=-=60/1/)(0 α αm m x x u 3.3确定结点值 设取结点总数m=3,由式2-3可得各结点处的有关各值如表(3-1)所示。 表(3-1) 各结点处的有关各值 3.4 确定初始角0α、0? 通常我们用试算的方法来确定初始角0α、0?,而在本次连杆设计中将通过编程试 算的方法来确定。具体思路如下: 任取0α、0?,把0α、0?取值与上面所得到的三个结点处的 α i 、?i 的值代入 P134式8-17 从而得到三个关于P 0、P 1、P 2的方程组,求解方程组后得出P 0、P 1、P 2,再令 P 0=m, P 1=-m/n, P 2=)2/()1(2 22n l n m -++。然 后求得m,n,l 的值。由此我们可以在机构确定的初始值条件下找 到任意一位置的期望函数值与再现函数值的偏差值??。当 ? 具体程序如下: #include #include #define PI 3.1415926 #define t PI/180 void main() { int i; float p0,p1,p2,a0,b0,m,n,l; float A,B,C,r,s,f1,f2,g1,g2,g,j; //定义所需要的量 float u1=1.0/60,u2=0.693/85,x0=1.0,y0=0.0; float a[3],b[3],a1[6],b1[3],a5[5]; FILE *p; if((p=fopen("d:\\zdp.txt","w"))==NULL) //将输出的值放在文档里方便查看 { printf("can't open the file!"); } a[0]=4.02; //输入初始值的三组节点的角度 a[1]=30; a[2]=55.98; b[0]=7.97; b[1]=49.68; b[2]=80.83; a5[0]=0;a5[1]=a[0];a5[2]=a[1];a5[3]=a[2];a5[4]=60; printf("please input a0: \n"); //输人α0和φ0的初始值 scanf("%f",&a0); printf("please input b0: \n"); scanf("%f",&b0); for(i=0;i<3;i++) { a1[i]=cos((b[i]+b0)*t); a1[i+3]=cos((b[i]+b0-a[i]-a0)*t); //取得三个节点 b1[i]=cos((a[i]+a0)*t); } p0=((b1[0]-b1[1])*(a1[4]-a1[5])-(b1[1]-b1[2])*(a1[3]-a1[4]))/ ((a1[0]-a1[1])*(a1[4]-a1[5])-(a1[1]-a1[2])*(a1[3]-a1[4])); p1=(b1[0]-b1[1]-(a1[0]-a1[1])*p0)/(a1[3]-a1[4]); //列出P0,P1,P2的关系式 p2=b1[0]-a1[0]*p0-a1[3]*p1; m=p0; //列出m,n,l与P0,P1,P2的关系式 n=-m/p1; l=sqrt(m*m+n*n+1-2*n*p2); //由上几式可以解得m,n,l的值 printf("p0=%f,p1=%f,p2=%f,m=%f,n=%f,l=%f\n",p0,p1,p2,m,n,l); fprintf(p,"p0=%f,p1=%f,p2=%f,m=%f,n=%f,l=%f\n",p0,p1,p2,m,n,l); printf("\n"); fprintf(p,"\n"); for(i=0;i<5;i++) {printf("please input one angle of fives(0--60): "); //输入三个节点值即初始位置 printf("when the angle is %f\n",a5[i]); //用三个节点值即初始位置进行验证 fprintf(p,"when the angle is %f\n",a5[i]); A=sin((a5[i]+a0)*t); B=cos((a5[i]+a0)*t)-n; C=(1+m*m+n*n-l*l)/(2*m)-n*cos((a5[i]+a0)*t)/m; j=x0+u1*a5[i]; printf("A=%f,B=%f,C=%f,j=%f\n",A,B,C,j); s=sqrt(A*A+B*B-C*C); f1=2*(atan((A+s)/(B+C)))/(t)-b0; //求得φ的两个值 f2=2*(atan((A-s)/(B+C)))/(t)-b0; r=(log(j)-y0)/u2; //求φˊ的值 g1=f1-r; //得出两个△φ的值 g2=f2-r; if(abs(g1) g=g1; else g=g2; printf("f1=%f,f2=%f,g=%f\n",f1,f2,g); fprintf(p,"f1=%f,f2=%f,g=%f\n",f1,f2,g); printf("\n\n"); //输出得到的5组数据 fprintf(p,"\n\n"); } } 结合课本P135,试取0α=86°,0?=24.5°时: 程序运行及其结果为: p0=0.603016,p1=-0.448848,p2=-0.268262,m=0.603016,n=1.343475,l=1.972146 when the angle is 0.000000 f1=-124.826622,f2=-0.308787,g=-0.308787 when the angle is 4.020000 f1=-130.279190,f2=7.970003,g=0.015696 when the angle is 30.000000 f1=-152.214340,f2=49.680008,g=-0.052364 when the angle is 55.980000 f1=-162.068558,f2=80.830009,g=-0.008698 when the angle is 60.000000 f1=-162.777771,f2=84.909172,g=-0.108879 由程序运行结果可知:当取初始角0α=86°、0?=24.5°时? 由上面的程序结果可m=0.603016,n=1.343475,l=1.972146。 3.6 检查偏差值?? 对于四杆机构,其再现的函数值可由P134式8-16求得 ()?θ?0 2 2 2 3]/)arctan[( 2-+++==C B C B A 3-2 式中: A=sin(α α0 + ) ; B=cos(α α0 + )-n ; C =)2/()1(2 22m l n m -++- ncos(α α0 + )/m 按期望函数所求得的从动件转角为 u y x ?αα?μ/])[ln('0 0-+= 3-3 则偏差为 若偏差过大不能满足设计要求时,则应重选计量起始角 0α、0ψ以及主、从动件的转角变化范围m α、m ?等,重新进行设计。同样由上面 的程序运行结果得出每一个取值都符合运动要求,即 : (??=k1(k2)) ? 3.7 杆长的确定 根据杆件之间的长度比例关系m ,n ,l 和这样的关系式b/a=l c/a=m d/a=n 确定 各杆的长度,当选取主动杆的长度后,其余三杆长的度随之可以确定;在此我们假设主动连架杆的长度为 a=50 ,则确定其余三杆的长度由下面的程序确定: #include #include #include void main() { float a=50,b,c,d; //令AB 杆的初始长度为50 float m=0.603016,n=1.343475,l=1.972146; //由方程解得的m,n,l 的值 FILE *p; if((p=fopen("d:\\zdp.txt","w"))=NULL) //将输出的值放在文档里方便查看 { printf("can't open the file!"); exit(0); } b=l*a; //简单的乘法计算得到各杆的长度c=m*a; d=n*a; printf("a=%f\nb=%f\nc=%f\nd=%f\n",a,b,c,d); //输出所得到的值fprintf(p,"a=%f\nb=%f\nc=%f\nd=%f\n",a,b,c,d); fclose(p); } 运行结果为: a=50.000000 b=98.607300 c=30.150801 d=67.173749 3.8 连架杆在各位置的再现函数和期望函数最小差值? ?的确定 i为序列号 a1[i]=αi f1[i]=?i r[i] =?'i k =?? 如下面的程序: #include #include #include #define PI 3.1415926 #define t PI/180 void main() { float a0=86,b0=24.5,m=0.603016,n=1.343475,l=1.972146; float A,B,C,s,j,g1,g2,g; float x0=1.0,y0=0.0,u1=1.0/60,u2=0.693/85 ; //原来所得到的数据float x[130],y1[130],y2[130],a1[130],f1[130],f2[130],r[130]; int i; FILE *p; if((p=fopen("d:\\zdp.txt","w"))==NULL) //将输出的值放在文档里方便查看 { printf("can't open the file! "); exit(0); } printf(" i a1[i] f1[i] r[i] g\n\n"); fprintf(p," i a1[i] f1[i] r[i] g\n\n"); for(i=0; a1[i]<=60;i++) { a1[0]=0; A=sin((a1[i]+a0)*t); B=cos((a1[i]+a0)*t)-n; C=(1+m*m+n*n-l*l)/(2*m)-n*cos((a1[i]+a0)*t)/m; j=x0+u1*a1[i]; s=sqrt(A*A+B*B-C*C); f1[i]=2*(atan((A+s)/(B+C)))/(t)-b0; //求得φ的两个值 f2[i]=2*(atan((A-s)/(B+C)))/(t)-b0; r[i]=(log(j)-y0)/u2; //求得φˊ的值 g1=f1[i]-r[i]; //得到两个△φ的值 g2=f2[i]-r[i]; x[i]=a1[i]*u1+x0; y2[i]=log(x[i]); if(abs(g1) g=g1; y1[i]=f1[i]*u2+y0; printf(" %-6d%-7.1f%-12.4f%-10.4f%-10.4f%\n",i,a1[i],f2[i],r[i],g); fprintf(p,"%-6d%-7.1f%-12.4f%-10.4f%-10.4f%\n",i,a1[i],f2[i],r[i],g); } else { g=g2; y1[i]=f2[i]*u2+y0; 目录 一、设计题目 (2) 1、牛头刨床的机构运动简图 (2) 2、工作原理 (2) 二、原始数据 (3) 三、机构的设计与分析 (4) 1、齿轮机构的设计 (4) 2、凸轮机构的设计 (10) 3、导杆机构的设计 (16) 四、设计过程中用到的方法和原理 (26) 1、设计过程中用到的方法 (26) 2、设计过程中用到的原理 (26) 五、参考文献 (27) 六、小结 (28) 一、设计题目 ——牛头刨床传动机构 1、牛头刨床的机构运动简图 2、工作原理 牛头刨床是对工件进行平面切削加工的一种通用机床,其传动部分由电动机经 带传动和齿轮传动z 0—z 1 、z 1 、—z 2 ,带动曲柄2作等角速回转。刨床工作时,由导 杆机构2、3、4、5、6带动刨刀作往复运动,刨头右行时,刨刀进行切削,称为工 作行程;刨头左行时,刨刀不进行切削,称为空回行程,刨刀每切削完一次,利用 空回行程的时间,固结在曲柄O 2 轴上的凸轮7通过四杆机构8、9、10与棘轮11和棘爪12带动螺旋机构(图中未画),使工作台连同工件作一次进给运动,以便刨刀继续切削。 二、原始数据 设计数据分别见表1、表2、表3. 表1 齿轮机构设计数据 设计内容齿轮机构设计 符号n01d01 d02 z0 z1 z1’m01 m1’2n2 单位r/min mm mm mm mm r/min 方案Ⅰ1440 100 300 20 40 10 3.5 8 60 方案Ⅱ1440 100 300 16 40 13 4 10 64 方案Ⅲ1440 100 300 19 50 15 3.5 8 72 表2 凸轮机构设计数据 设计内容凸轮机构设计 符号L O2O4 L O4D φ[α]δ02 δ0 δ01δ0/ r0 r r 摆杆运动规 律单位mm mm °°°°°°mm mm 方案Ⅰ150 130 18 45 205 75 10 70 85 15 等加速等减 速 方案Ⅱ165 150 15 45 210 70 10 70 95 20 余弦加速度方案Ⅲ160 140 18 45 215 75 0 70 90 18 正弦加速度方案Ⅳ155 135 20 45 205 70 10 75 90 20 五次多项式 表3 导杆机构设计数据 设计内容导杆机构尺度综合和运动分析 符号K n2L O2A H L BC 单位r/min mm 方案Ⅰ 1.46 60 110 320 0.25L O3B 方案Ⅱ 1.39 64 90 290 0.3L O3B 方案Ⅲ 1.42 72 115 410 0.36L O3B 表4 机构位置分配表 位置号位置 组 号 学生号 A B C D 1 1 3 6 8/ 10 2 5 8 10 7/ 1/ 4 7 8 10 1 5 7/ 9 12 2 1/ 4 7 8 11 1 3 6 8/ 11 2 5 7/ 9 11 1/ 3 6 8/ 11 3 2 5 7/ 9 12 1/ 4 7 9 12 1 3 6 8/ 12 2 4 7 8 10 机械原理课程设计说明书 题目:摆式送料机构总体设计 姓名:冯帅 学号: 专业: 班级: 学院:交通与车辆工程学院 指导教师: 2013年7月9日 目录 第一章机械原理课程设计指导书 (2) 一.机械原理课程设计的目的 (2) 二.机械原理课程设计的任务 (2) 三.课程设计步骤 (2) 四.基本要求 (3) 五.时间安排 (3) 六.需交材料 (3) 第二章摆式送料机构总体设计过程 (3) 一工作原理 (3) 二设计方案 (5) 三利用解析法确定机构的运动尺寸 (6) 四连杆机构的运动分析 (10) ⑴速度分析 (10) ⑵加速度分析 (12) 第三章课程设计总结 (14) 第四章参考文献 (14) 第一章机械原理课程设计指导书 一.机械原理课程设计的目的 机械原理课程设计是机械原理课程教学中最后的一个重要的实践性教学环节,是培养学个进行自动机械总体方案设计、运动方案设计、执行机构选型设计,传动方案设计控制系统设计以及利用用计算机对工程实际中各种机构进行分析和设计能力的一个重要的川练过程。其目的如下: (1)通过课程设计,综合运用所学的知识,解决工程实际问题。并使学生进一步巩固和加深所学的理论知识。 (2)使学生得到拟定机械总体方案、运动方案的训练,并且有初步的机械选型与组合及确定传动方案的能力,培养学生开发、设计、创新机械产品的能力。 (3)使学生掌握自动机械设计的内容、方法、步骤,并对动力分析与设计有个较完整的概念。 (4)进一步提高学生的运算、绘图、表达及运用计算机和查阅有关技术资料的能力。 (5)通过编写说明书,培养学生的表达、归纳及总结能力。 二.机械原理课程设计的任务 机械原理课程设计的任务一般分为以下几部分。 (1)根据给定机械的工作要求,合理地进行机构的选型与组合。 (2)拟定该自动机械系统的总体、运动方案(通常拟定多个),对各运动方案进行对比和选择,最后选定一个最佳方案作为个设计的方案,绘出原理简图。 (3)传动系统设计,拟定、绘制机构运动循环图。 三.课程设计步骤 1.机构设计和选型 (1)根据给定机械的工作要求,确定原理方案和工艺过程。 (2)分析工艺操作动作、运动形式和运动规律。 (3)拟定机构的选型与组合方案,多个方案中选择最佳的。 (4)设计计算。 (5)结构设计、画图。 (6)编写设计计算说明书。 2.自动机械总体方案设计 (1)根据给定机械的工作要求,确定实现功能要求原理方案。 (2)根据原理方案确定工艺方案和总体结构。 (3)拟定工作循环图。 (4)设计计算。 (5)画图。 《机械原理课程设计》教学大纲 课程名称:机械原理课程设计 课程性质:集中实践教学环节必修课程 学分:2 学时:2周 授课单位:机电工程学院 适用专业:机电一体化专科专业 预修课程:《机械制图》,《高等数学》,《材料与金属工艺学》,《理论力学》,《材料力学》、《机械原理》。 开设学期:第三学期 一、课程设计教学目的与基本要求: 1.教学目的:机械原理课程设计是对机械类专业学生进行的一次设计实践性教学环节。其主要目的是进一步巩固、理解并初步运用所学知识,在接触和了解工程技术实际(如工程设计方法、工程设计资料等)的基础上,对学生进行较为系统的设计方法训练,以达到初步培养学生分析问题、解决实际工程问题的能力。 2.基本要求:机械原理课程设计实质上是进行机构运动简图的设计。因此,它的基本要求是:提出设计方案、选用机构类型及其组合,确定运动学尺寸、进行运动分析和动态静力分析、飞轮转动惯量的计算等等。完成必要的计算机三维绘图或编程、图纸绘制和编写设计计算说明书。机械原理课程设计中,作图求解或解析的方法均可采用。 二、课程设计内容及安排: 1.主要设计内容:课程设计内容可根据专业要求从以下项目中选定: (1)运动方案设计 (a)工作原理和工艺动作分解; (b)机械运动方案的拟定; (c)机械执行机构的选择和评定(连杆机构的设计及分析、凸轮机构设计、齿轮机构或轮系设计、其它基本机构设计); (d)根据工艺动作和协调要求拟定运动循环图; (e)机械传动系统的设计选择和评定; (2)执行机构尺寸设计 (a)执行机构各部分尺寸设计; (b)机构运动简图; (c)飞轮转动惯量的确定; (d)机械动力性能的分析计算。 (3)编写设计说明书。 (4)答辩。 2.时间安排:在机械原理课程和其它先修课程完成后,安排2周时间进行机械原理课程设计。 三、指导方式:集体辅导与个别辅导相结合 四、课程设计考核方法及成绩评定: 1.考核方式:根据设计图和设计说明书及答辩进行成绩评定,不再考试。 2.成绩评定:由1~2名教师组成答辩小组,对学生完成的设计图和设计计算说明书的内容进行提问,并根据学生回答问题的正确性以及设计内容,按优秀、良好、中等、及格和不及格进行评分。 五、课程设计教材及主要参考资料: [1]牛鸣岐主编.《机械原理课程设计手册》.重庆大学出版社,2001年 [2]郑文纬主编.《机械原理》第7版.高等教育出版社,1997年 [3]孙桓主编.《机械原理》第7版.高等教育出版社,2006年 [4]朱理主编.《机械原理》第1版.高等教育出版社,2004年 大纲撰写人签字:学院章 学院负责人签字:年月日 山东大学机械原理课程设计 学院机械工程学院 班级 成员 指导教师 目录 任务与要求 .............................................................................................................. - 3 -方案一 ...................................................................................................................... - 3 -设计要求 ............................................................................................................................. - 3 - 机构类型 ..................................................................................................................... - 3 - 结构特点 ..................................................................................................................... - 3 - 尺寸特征 ................................................................................................................... - 11 - 分析条件 ................................................................................................................... - 12 - ADAMS软件建模.............................................................................................................. - 4 - ADAMS软件仿真.............................................................................................................. - 5 - 最终输出构件的压力角............................................................................ 错误!未定义书签。方案二 ...................................................................................................................... - 6 -设计要求 ........................................................................................................................... - 11 - 机构类型 ........................................................................................... 错误!未定义书签。 结构特点 ................................................................................................................... - 11 - 尺寸特征 ........................................................................................... 错误!未定义书签。 质量属性 ........................................................................................... 错误!未定义书签。 ADAMS软件建模............................................................................................................ - 12 - ADAMS软件仿真............................................................................................................ - 13 - 输出构件压力角 ............................................................................................................... - 20 - 方案三 .................................................................................................................... - 21 -设计要求 ........................................................................................................................... - 21 - 机构类型 ................................................................................................................... - 21 - 结构特点 ................................................................................................................... - 21 - 尺寸特征 ................................................................................................................... - 21 - 质量属性 ................................................................................................................... - 22 - ADAMS软件建模............................................................................................................ - 22 - ADAMS软件仿真............................................................................................................ - 23 - 输出构件压力角 ....................................................................................... 错误!未定义书签。总结分析 ................................................................................................................ - 38 -小组总结 ................................................................................................................ - 38 -参考文献 ................................................................................................................ - 38 -致谢 ........................................................................................................................ - 39 - - 2 - 机械原理课程设计说明书设计题目:块状物品推送机的机构综合与结构设计 班级: 姓名: 学号: 同组成员: 组长: 指导教师: 时间: 一、设计题目 (2) 二、设计数据与要求 (2) 三、设计任务 (3) 四、方案设计 (4) 1.凸轮连杆组合机构 (4) 2.凸轮机构 (5) 3.连杆机构 (6) 4.凸轮齿轮组合机构 (7) 五、方案尺寸数据及发动机参数 (7) 六、运动分析 (8) 1.位移分析 (8) 2.速度分析 (9) 3.加速度分析 (10) 七、飞轮设计 (11) 八、个人总结 (12) 一、设计题目 在自动包裹机的包装作业过程中,经常需要将物品从前一工序转送到下一工序。现要求设计一用于糖果、香皂等包裹机中的物品推送机,将块状物品从一位置向上推送到所需的另一位置,如图所示。 二、设计数据与要求 1.向上推送距离H=120mm,生产率为每分钟推送 物品120件。 2.推送机的原动机为同步转速为3000转/分的三 相交流电动机,通过减速装置带动执行机构主动件等速转动。 3.由物品处于最低位置时开始,当执行机构主动件转过1500时,推杆从最 低位置运动到最高位置;当主动件再转过1200时,推杆从最高位置又回 到最低位置;最后当主动件再转过900时,推杆在最低位置停留不动。 4.设推杆在上升运动过程中,推杆所受的物品重力和摩擦力为常数,其值 为500N;设推杆在下降运动过程中,推杆所受的摩擦力为常数,其值 为100N。 5.使用寿命10年,每年300工作日,每日工作16小时。 6.在满足行程的条件下,要求推送机的效率高(推程最大压力角小于350), 结构紧凑,振动噪声小。 三、设计任务 1.至少提出三种运动方案,然后进行方案分析评比,选出一种运动方案进 行机构综合。 2.确定电动机的功率与满载转速。 3.设计传动系统中各机构的运动尺寸,绘制推送机的机构运动简图。 4.在假设电动机等速运动的条件下,绘制推杆在一个运动周期中位移、速 度和加速度变化曲线。 5.如果希望执行机构主动件的速度波动系数小于3%,求应在执行机构主动 件轴上加多大转动惯量的飞轮。 6.进行推送机减速系统的结构设计,绘制其装配图和两张零件图。 7.编写课程设计说明书。 机械原理课程设计 编程说明书 设计题目:牛头刨床凸轮机构指导教师:王琦王春华设计者:雷选龙 学号:0807100309 班级:机械08-3 2010年7月15日 辽宁工程技术大学 机械原理课程设计任务书(二) 姓名雷选龙专业机械工程及自动化班级机械08-3班学号 五、要求: 1)计算从动件位移、速度、加速度并绘制线图。 2)确定凸轮机构的基本尺寸,选取滚子半径,画出凸轮实际廓线,并按比例绘出机构运动简图。以上内容作在A2或A3图纸上。 3)编写出计算说明书。 指导教师: 开始日期:2010年07月10日完成日期:2010年07月16日 目录 一设计任务及要求-----------------------------------------------2 二数学模型的建立-----------------------------------------------2 三程序框图--------------------------------------------------------5 四程序清单及运行结果-----------------------------------------6 五设计总结-------------------------------------------------------14 六参考文献-----------------------------------------------------15 一 设计任务与要求 已知摆杆9为等加速等减速运动规律,其推程运动角φ=70,远休止角φs =10,回程运动角φ?=70,摆杆长度l 09D =125,最大摆角φ max =15,许用压力角[α]=40,凸轮与曲线共轴。 (1) 要求:计算从动件位移、速度、加速度并绘制线图(用方格纸 绘制),也可做动态显示。 (2) 确定凸轮的基本尺寸,选取滚子半径,画出凸轮的实际廓线, 并按比例绘出机构运动简图。 (3) 编写计算说明书。 二 机构的数学模型 1 推程等加速区 当2/0?δ≤≤时 角位移 22max /21?δ?=m 角速度 2max /4?δ?ω= 角加速度 2max /4??ε= 2 推程等减速区 当?δ?≤<2/时 角位移 22max max /)(21?δ???--=m 角速度 2max /)(4?δ??ω-= 角加速度 2max /4??ε-= 3 远休止区 当s ??δ?+≤<时 角位移 max 1?=m 角速度 0=ω 角加速度 0=ε . 机械原理课程设计答辩参考选题 1.机构选型? 2.何谓何谓机构尺度综合? 3.平面连杆机构的主要性能和特点是什么? 4.何谓机构运动循环图? 5.机构运动循环图有哪几种类型? 6.在机构组合中什么是串联式组合? 7.在机构组合中什么是并联式组合? 8.在机构组合中什么是反馈式组合? 9.平面机构的构件常见的运动形式有哪几种? 10.举例说明有哪些机构可以实现将转动变成直线移动。 11.举例说明有哪些机构可以实现将转动变成摆动。 12.举例说明有哪些机构能满足机构的急回运动特性? 13.对于外凸凸轮,为了保证有正常的实际轮廓,其滚子半径选取有什么要求? 14.要求一对外啮合直齿圆柱齿轮传动的中心距略 小于标准中心距,并保持无侧隙啮合,此时应采用什么传动? 15.在凸轮机构中,从动件按等加速、等减速运动规律运动时,有何冲击? .. . 16.蜗杆的标准参数在何处,蜗轮的标准参数在何处? 17.平面四杆机构共有几个瞬心,其中有几个绝对瞬心、几个相对瞬心? 18.在平面机构中,每个高副引入几个约束、每个低副引入几个约束?; 19.当两构件组成转动副时,其瞬心位于何处?当构件组成移动副时,其瞬心位于何处? 20.机械效率可以表达为什么值的比值? 21.标准渐开线斜齿圆柱齿轮传动的正确啮合条件是什么? 22.标准渐开线直齿圆柱齿轮的基本参数是哪几个? 23.从机械效率的观点看,机械的自锁条件是什么? 24.试叙机构与运动链的区别? 25.试计算所设计机构的自由度。 26.试说明所设计机构的工作原理。 27.四杆机构同样可以将旋转运动的输入变为直线运动的输出,为什么有的摇摆式输送机要采用6杆机构? 28.机械原理课程设计的任务一般可分为几个部分? 29.机械原理课程设计的方法原则上可分为几类? 30.机械运动方案设计主要包括哪些内容? 31.执行机构按运动方式及功能可分为几类? .. . 32.做匀速转动的机构常用的有哪几种? 33.做非匀速转动的机构常用的有哪几种? 34.分析凸轮机构在本设计中所起的作用。 35.做往复移动的机构常用的有哪几种? 36.平面连杆机构的主要性能和特点是什么? 37.凸轮机构的主要性能和特点是什么? 38齿轮机构的主要性能和特点是什么? 39.分析影响行程速比系数K值大小的几何尺寸。 机械原理课程设计 题目:干粉压片机 学校:洛阳理工学院 院系:机电工程系 专业:计算机辅助设计与制造 班级:z080314 设计者:李腾飞(组长)李铁山杜建伟 指导老师:张旦闻 2010年1月1日星期五 课程设计评语 课程名称:干粉压片机的机构分析与设计 设计题目:干粉压片机 设计成员:李腾飞(组长)李铁山杜建伟 指导教师:张旦闻 指导教师评语: 2010年1月1日星期五 前言 干粉压片机装配精度高,材质优良耐磨损,稳定可靠,被公认为全国受欢迎产品。特别是现在的小型干粉压片机,市场前景很好。很多小型企业不可能花高价去买大型的,而且得不尝试,所以小型压片机更少中小型企业青睐。例如蚊香厂、鱼药饲料厂、消毒剂厂、催化剂厂都相继使用。本机还可改为异形冲模压片。由于该机型相对于其他机型压力较大,压片速度适中,因而受到生产奶片、钙片、工业、电子异形片的厂家欢迎。相信本厂品会给您带来良好的企业效应。 编者:洛阳理工学院第二小组 日期:2010年1月1日星期五 目录 一. 设计题目 (5) 1.工作原理以及工艺过程 (5) 2.原始数据以及设计要求 (5) 二. 设计题目的分析 (5) 1. 总功能分析 (5) 2. 总功能分解 (5) 3. 功能元求解 (6) 4. 运动方案确定 (7) 5. 方案的评价 (9) 6. 运动循环图 (10) 7. 尺度计算 (11) 8.下冲头对心直动滚子推杆盘形凸轮机 (13) 9.下冲头对心直动滚子推杆盘形凸轮机的位移曲线 (13) 三. 干粉压片机各部件名称以及动作说明 (14) 四. 参考书目 (14) 五. 新得体会 (14) 《机械原理》课程设计 计算说明书 设计题目:健身球检验分类机 院校:武汉大学东湖分校工学院 专业:机械设计制造及其自动化 班级:2005级(1)班 设计者:方旭东 学号:2 指导老师:张荣 日期:2009年1月6日 目录 设计任务书············································ 设计方案说明·········································· 一、设计要求·········································· 二、方案确定·········································· 三、功能分解·········································· 四、选用机构·········································· 五、机构组合设计······································ 六、运动协调设计······································ 七、圆柱直齿轮设计···································· 八、方案评价·········································· 参考文献··············································· 设计小结··············································· 方案设计说明 一.设计要求 设计健身球自动检验分类机,将不同直径尺寸的健身球按直径分类。检测后送入各自指定位置,整个工作过程(包括进料、送料、检测、接料)自动完成。 健身球直径范围为ф40~ф46mm,要求分类机将健身球按直径的大小分为三类。 1. ф40≤第一类≤ф42 2. ф42<第二类≤ф44 3. ф44<第三类≤ф46 电机转速:720r/min,生产率(检球速度)20个/min。 二.方案确定 初选了三种设计方案,如下: 方案一: 一、课程设计的意义、内容及步骤 随着生产技术的不断发展,机械产品种类日益增多,对产品的机械自动化水平也越来越 高,因此,机械设备设计首先需要进行机械运动方案的设计和构思、各种传动机构和执行机 构的选用和创新设计。本指导书旨在根据高校工科本科《机械原理课程教学基本要求》的要 求:结合一个简单的机械系统,综合运用所学理论和方法,使学生能受到拟定机械运动方案的初步训练,并能对方案中某些机构进行分析和设计,针对某种简单机器(即工艺动作过程 较简单)进行机构运动简图设计。 设计过程指从明确设计任务到编制技术文件为止的整个设计工作的过程,该过程一般来 讲包括四个阶段:1)明确设计任务和要求;2)原理方案设计;3)技术设计;4)施工设计。本 次设计的主要内容主要完成前两个任务,完成的步骤如下; 设汁任务I神服文现礴足列施的罐本原现-T星本T艺劭怦的即是I-二选揮执行机构亍■ 绘制机构运功祁画I_ 黴新瓦标詡示直图I一匹苻机狷矗尺可金豕迄功学设审一I绘制机购运动简圏I 运动学和动力学分析If进行评价比较优选I 二、机械原理课程设计的基本要求 1.设计结果体现创新精神。 2.方案设计阶段以小组为单位,组织学生参观讨论,分析机器的结构、传动方式、工 作原理,给出至少两种运动方案,并对其进行比较,从中选出最优方案。 3.方案确定以后,进行机构尺寸综合和机构运动分析时,每个学生的参数不同,独自 设计。若发现尚未达到工作要求,应审查方案,调整机构的尺寸,重新进行设计。 4.每个学生绘制一张图纸,应包括机械系统运动方案简图和机械运动循环图,一两个 主要机构的运动分析及设计程序。 5.写一份设计说明书,最后进行答辩。 6.成绩的评定。课程设计的成绩单独评定。应以设计说明书、图样和在答辩中回答问题的情况为依据, 参考设计过程中的表现,由指导教师按五级计分制(优、良、中、及格、不及格)进行评定。 、机械运动简图设计内容 1?功能分解 机器的功能是多种多样的,但每一种机器都要完成某一工艺动作过程。将机械所需完 成的工艺动作过程进行分解,即将总功能分解为多个功能元,在机械产品中就是将工艺动作 过程分解为若干个执行动作。设计者必须把动作过程分解为几个独立运动的分功能,然后用 树状功能图来描述,使机器的总的功用及各分功能一日了然。 例如,设计一部四工位专用机床,它可以分解成如下几个工艺动作: 机械原理课程设计说明书 设计题目: 指导老师:哈丽毕努 设计者:马忠福 所属院系:新疆大学机械工程学院专业:机械工程及自动化 班级:机械 10-7 班 完成日期: 2014年7月 新疆大学 《机械原理课程设计》任务书 班级: 机械姓名: 马忠福 课程设计题目: 冲压式蜂窝煤成型机 课程设计完成内容: 设计说明书一份(主要包括:运动方案设计、方案的决策与尺度综合、必要的机构运动分析和相关的机构运动简图) 发题日期: 2014 年 6 月 15 日 完成日期: 2014 年 7 月 25 日 指导教师: 哈利比努 目录 一、蜂窝煤的功能和设计要求 (1) 二、工作原理和工艺动作分解 (2) 三、根据工艺动作顺序和协调要求拟定运动循环图 (2) 四、执行机构的选型 (3) 五、机械运动方案的选定和评价 (4) 六、机械传动系统的传动比和变速机构 (5) 七、画出机械运动方案简图 (5) 八、对机械传动系统和执行机构进行尺寸计算 (6) 1、带传动计算: (6) 2、齿轮传动计算 (6) 3、曲柄滑块机构计算 (6) 4、槽轮机构计算 (7) 5、扫屑凸轮计算 (7) 九、机械方案运动简图 (8) 十、参考文献 (9) 一、蜂窝煤的功能和设计要求 冲压式蜂窝煤成型机是我国城镇峰窝煤(通常又称煤饼)生产厂的主要生产设备,这种设备由于具有结构合理、质量可靠、成型性能好、经久而用、维修方便等优点而被广泛采用。 冲压式蜂窝煤成型机的功能是将粉煤加入转盘的模简内,经冲头冲压成峰窝煤。为了实现蜂窝煤冲压成型,冲压式蜂窝煤成型机必须完成五个动作: (1)粉煤加料; (2)冲头将蜂窝煤压制成型; (3)清除冲头和出煤盘的积屑的扫屑运动; (4)将在模简内的冲压后的蜂窝煤脱模; (5)将冲压成型的蜂窝煤输送。 图1.1冲头、脱模盘、扫屑刷、模筒转盘位置示意图 冲压式蜂窝煤成型机的设计要求和参数有: (1)蜂窝煤成型机的生产能力:30次/min; (2)驱动电机:Y180L-8,功率N=111KW;转速n=710r/min; (3)机械运动方案应力求简单; (4)图1.1表示冲头、脱模盘、扫屑刷、模筒转盘的相互位置情况。实际上冲头和脱模盘都与上下移动的滑梁连成一体,当滑梁下冲时将粉煤冲压成蜂窝煤,脱模盘将以压成的蜂窝煤脱模。在滑梁上升过程中扫屑刷将冲头和脱模盘刷除粘着粉煤,模筒转盘上均布了模筒,转盘的间歇机构使加料的模筒进入冲压位置、成型的模筒进入脱模位置、空模筒进入加料位置。 (5)为了改善蜂窝煤冲压成型的质量,希望冲压机构在冲压后有一保压时间。 (6)由于冲头压力较大,希望冲压机构具有增力功能,以增大有效作用,减小原动机的功率。 机械原理课程设计压床 机构 Pleasure Group Office【T985AB-B866SYT-B182C-BS682T-STT18】 机械原理课程设计说明书 设计题目: 学院: 班级: 设计者: 学号: 指导老师: 目录 一、机构简介与设计数据 .机构简介 图示为压床机构简图,其中六杆机构为主体机构。图中电动机经联轴器带动三对齿轮将转速降低,然后带动曲柄1转动,再经六杆机构使滑块5克服工作阻力r F而运动。为了减少主轴的速度波动,在曲柄轴A 上装有大齿轮6z并起飞轮的作用。在曲柄轴的 另一端装有油泵凸轮,驱动油泵向连杆机构的供油。 (a)压床机构及传动系统 机构的动态静力分析 已知:各构件的重量G及其对质心轴的转动惯量Js(曲柄1和连杆4的重力和转动 惯量(略去不计),阻力线图(图9—7)以及连杆机构设计和运动分析中所得的结果。 要求:确定机构一个位置的各运动副中的反作用力及加于曲柄上的平衡力矩。作图部分亦画在运动分析的图样上。 凸轮机构构设计 已知:从动件冲程H,许用压力角[α].推 程角δ。,远休止角δ,回程角δ',从动件的运 动规律见表9-5,凸轮与曲柄共轴。 要求:按[α]确定凸轮机构的基本尺寸.求 出理论廓 线外凸曲线的最小曲率半径ρ。选取滚子半径 r,绘制凸轮实际廓线。以上内容作在2号图纸 上 .设计数据 设计内容连杆机构的设计及运动分析 符号 单位mm 度mm r/min 数I 50 140 220 60 1201501/2 1/4 100 1/2 1/2 据II 60 170 260 60 1201801/2 1/4 90 1/2 1/2 III 70 200 310 60 120 210 1/2 1/4 90 1/2 1/2 连杆机构的动态静力分析及飞轮转动惯量的确定 [δ] G2 G3 G5 N 1/30 660 440 300 4000 1/30 1060 720 550 7000 1/30 1600 1040 840 11000 凸轮机构设计 [a]ΦΦS Φˊ0mm 0 16 120 40 80 20 75 18 130 38 75 20 90 18 135 42 65 20 75 二、压床机构的设计 .传动方案设计 优点: 结构紧凑,在C点处,力的 方向与速度方向相同,所以传动 γ=?,传动效果最好;满足 角90 急回运动要求; 机械原理课程设计说明书课题名称:新型窗户启闭装置 学院:机电工程学院 专业:机械电子工程 班级:09级01班 小组成员: 指导老师: 课题工作时间:2011.9.1至2011.9.10 前言 机械原理课程设计是使学生较全面、系统巩固和加深机械原理课程的基本原理和方法的重要环节,是培养学生“初步具有确定机械运动方案,分析和设计机械的能力”及“开发创新能力”的一种手段。其目的是: 1) 以机械系统运动方案设计与拟定为结合点,把机械原理课程中分散于各章的理论和方法融会贯通起来,进一步巩固和加深学生所学的理论知识。 2) 使学生能受到拟定机械运动方案的训练,具有初步的机构选型与组合和确定运动方案的能力。 3) 使学生在了解机械运动的变换与传递及力传递的过程中,对机械的运动、动力分析与设计有一个较完整的概念。 4) 进一步提高学生运算、运用流行软件编写应用程序和技术资料的能力。 5) 通过编写说明书,培养学生表达、归纳、总结和独立思考与分析的能力。 要达到课程设计的目的,必须配以课程设计的具体任务:按照选定的机械总功能要求,分解成分功能,进行机构的选型与组合;设计该机械系统的几种运动方案,对各运动方案进行对比和选择;对选定方案中的机构——连杆机构、凸轮机构、齿轮机构,其他常用机构,组合机构等进行运动分析与参数设计;通过计算机编程,将机构运动循环图在计算机屏幕上动态地显示出来,并给出相应的运动参数值。 机械原理课程设计的主要方法,是采用解析法建立求解问题的数学模型,在此基础上应用目前流行的可视化编程语言(如:VB)编写求解程序,显示所设计机构的运动图形、运动参数值及机构仿真。 摘要:本次课程设计运用解析法建立了所设计的六杆机构的运动特性数学模型,利用Matlab运动仿真求出各铰接点和杆件的运动变化情况。然后基于Visual Basic程序设计运动仿真,绘出相应铰接点运动特性曲线,并将用解析法基于Matlab环境下运行的结果与Visual Basic程序设计仿真运动值进行比较。进 机械原理课程设计说明书设计题目:压床机构设计 自动化院(系)机械制造专业 班级机制0901 学号20092811022 设计者罗昭硕 指导老师赵燕 完成日期2011 年1 月4日 一、压床机构设计要求 1 .压床机构简介及设计数据 1.1压床机构简介 图9—6所示为压床机构简图。其中,六杆机构ABCDEF为其主体机构,电动机经联轴器带动减速器的三对齿轮z1-z2、z3-z4、z5-z6将转速降低,然后带动曲柄1转动,六杆机构使滑块5克服阻力Fr而运动。为了减小主轴的速度波动,在曲轴A上装有飞轮,在曲柄轴的另一端装有供润滑连杆机构各运动副用的油泵凸轮。 1.2设计数据 1.1机构的设计及运动分折 已知:中心距x1、x2、y, 构件3的上下极限角,滑块的冲程H,比值CE /CD、EF/DE,各构件质心S的位置,曲柄转速n1。 要求:设计连杆机构, 作机构运动简图、机构1~2个位置的速度多边形和加速度多边形、滑块的运动线图。以上内容与后面的动态静力分析一起画在l号图纸上。 1.2机构的动态静力分析 已知:各构件的重量G及其对质心轴的转动惯量Js(曲柄1和连杆4的重力和转动惯量(略去不计),阻力线图(图9—7)以及连杆机构设计和运动分析中所得的结果。 要求:确定机构一个位置的各运动副中的反作用力及加于曲柄上的平衡力矩。作图部分亦画在运动分析的图样上。 1.3飞轮设计 已知:机器运转的速度不均匀系数δ.由两态静力分析中所得的平衡力矩Mb;驱动力矩Ma为常数,飞轮安装在曲柄轴A上。 要求:确定飞轮转动惯量J。以上内容作在2号图纸上。 1.4凸轮机构构设计 已知:从动件冲 程H,许用压力角 [α ].推程角δ。,远 休止角δ?,回程角δ', 从动件的运动规律见 表9-5,凸轮与曲柄共 轴。 要求:按[α]确定 凸轮机构的基本尺 寸.求出理论廓 线外凸曲线的最小曲 率半径ρ。选取滚子 半径r,绘制凸轮实际 廓线。以上内容作在 2号图纸上 压床机构设计 二、连杆机构的设计及运动分析 12届机械原理课程设计 步进送料机 设计说明书 学生姓名付振强 学号8011208217 所属学院机械电气化工程学院 专业机械设计制造及其自动化 班级机械12-2 指导教师张涵 日期2010-06-30 前言 1 进入21世纪以来,随着科学技术、工业生产水平的不断发展和人们生活条件的不断改善市场愈加需要各种各样性能优良、质量可靠、价格低廉、效率高、能耗低的机械产品,而决定产品性能、质量、水平、市场竞争能力和经济效益的重要环节是产品设计。机械产品设计中,首要任务是进行机械运动方案的设计和构思、各种传动机构和执行机构的选用和创新设计。这要求设计者综合应用各类典型机构的结构组成、运动原理、工作特点、设计方法及其在系统中的作用等知识,根据使用要求和功能分析,选择合理的工艺动作过程,选用或创新机构型式并巧妙地组合成新的机械运动方案,从而设计出结构简单、制造方便、性能优良、工作可靠、实用性强的机械产品。 企业为了赢得市场,必须不断开发符合市场需求的产品。新产品的设计与制造,其中设计是产品开发的第一步,是决定产品的性能、质量、水平、市场竞争力和经济效益的最主要因素.机械原理课程设计结合一种简单机器进行机器功能分析、工艺动作过程确定、执行机构选择、机械运动方案评定、机构尺度综合、机构运动方案设计等,使学生进一步巩固、掌握并初步运用机械原理的知识和理论,对分析、运算、绘图、文字表达及技术资料查询等诸方面的独立工作能力进行初步的训练,培养理论与实际结合的能力,更为重要的是培养开发和创新能力。因此,机械原理课程设计在机械类专业学生的知识体系训练中,具有不可替代的重要作用。 本次我设计的是步进送料机,以小见大,设计并不是门简单的课程,它需要我们理性的思维和丰富的空间想象能力。我们可以通过对步进送料机的设计进一步了解机械原理课程设计的流程,为我们今后的设计课程奠定了基础。 目录 前言 (1) 课程设计说明书 学院:_________xxxxxxxxxxxxxxx__ 班级:xxxxxxxxxxxxx 学生姓名: xxx 学号:xxxxxxxxxxx 设计地点(单位)___________xxxxxxxxxxxxxxxxxx ____________ 设计题目:_____________牛头刨床__________________________ 完成日期:2015年7 月10日 成绩(五级记分制):______ __________ 教师签名:_________________________ 年月日 设计数据 (2) 1、概述 1.1 牛头刨床简介 (3) 1.2 运动方案分析与选择 (4) 2、导杆机构的运动分析 2.1 位置4的速度分析 (6) 2.4 位置4的加速度分析 (7) 2.3 位置9的速度分析 (11) 2.4 位置9的加速度分析 (12) 3、导杆机构的动态静力分析 3.1 位置4的惯性力计算 (15) 3.2 杆组5,6的动态静力分析 (15) 3.3 杆组3.4的动态静力分析 (16) 3.4 平衡力矩的计算 (17) 4、飞轮机构设计 4.1 驱动力矩 (19) 4.2 等效转动惯量 (19) 4.3 飞轮转动惯量 (20) 5、凸轮机构设计 (22) 6、齿轮机构设计 (26) 1.概述 一、机构机械原理课程设计的目的: 机械原理课程设计是高等工业学校机械类专业学生第一次较全面的机械运动 学和动力学分析与设计的训练,是本课程的一个重要实践环节。其基本目的在于: (1)进一步加深学生所学的理论知识,培养学生独立解决有关本课程实际问 题的能力。 (2)使学生对于机械运动学和动力学的分析设计有一较完整的概念。 (3)使学生得到拟定运动方案的训练,并具有初步设计选型与组合以及确定 传动方案的能力。 (4)通过课程设计,进一步提高学生运算、绘图、表达、运用计算机和查阅 技术资料的能力。 二、机械原理课程设计的任务: 机械原理课程设计的任务是对机械的主体机构(连杆机构、凸轮机构、齿轮机 构以及其他机构)进行设计和运动分析、动态静力分析,并根据给定机器的工作要 求,在此基础上设计凸轮、齿轮;或对各机构进行运动分析。要求学生根据设计任 务,绘制必要的图纸,编写说明书。 三、械原理课程设计的方法: 机械原理课程设计的方法大致可分为图解法和解析法两种。图解法几何概念较清晰、直观;解析法精度较高。根据教学大纲的要求,本设计主要应用图解法进行设计。 1.1牛头刨床的简介 一.机构简介: 机构简图如下所示:机械原理课程设计,详细
机械原理课程设计 摇摆送料机构
机械原理课程设计教学大纲
机械原理课程设计报告-模板
块状物品推送机机械原理课程设计
机械原理课程设计凸轮设计
机械原理课程设计参考答辩题
机械原理课程设计压片机设计说明书.
机械原理课程设计+例题实例
机械原理课程设计指导手册
机械原理课程设计
机械原理课程设计压床机构
【精品毕设】机械原理课程设计实例详解(包括源程序)
机械原理课程设计说明书
机械原理课程设计(步进送料机设计说明
牛头刨床机械原理课程设计方案一位置和位置