基于ANSYS的储液罐固有振动特性分析
振动试验基本知识
专业知识 1、振动试验基本知识 1.1 振动试验方法 试验方法包括试验目的,一般说明、试验要求、严酷等级及试验程序等几个主要部分。为了完成试验程序中规定的试验,在振动试验方法中又规定了“正弦振动试验”和“随机振动试验”两种型式的试验方法。 正弦振动试验 正弦振动试验控制的参数主要是两个,即频率和幅值。依照频率变和不变分为定频和扫频两种。 定频试验主要用于: a)耐共振频率处理:在产品振动频响检查时发现的明显共振频率点上,施加规定振动参数振幅的振动,以考核产品耐共振振动的能力。 b)耐予定频率处理:在已知产品使用环境条件振动频率时,可采用耐予定频率的振动试验,其目的还是为考核产品在予定危险频率下承受振动的能力。 扫频试验主要用于: ●产品振动频响的检查(即最初共振检查):确定共振点及工作的稳定性,找出产品共振频率,以做耐振处理。 ●耐扫频处理:当产品在使用频率范围内无共振点时,或有数个不明显的谐振点,必须进行耐扫频处理,扫频处理方式在低频段采用定位移幅值,高频段采用定加速度幅值的对数连续扫描,其交越频率一般在55-72Hz,扫频速率一般按每分钟一个倍频进行。 ●最后共振检查:以产品振动频响检查相同的方法检查产品经耐振处理后,各共振点 有无改变,以确定产品通过耐振处理后的可靠程度。 随机振动试验 随机振动试验按实际环境要求有以下几种类型:宽带随机振动试验、窄带随机振动试验、宽带随机加上一个或数个正弦信号、宽带随机加上一个或数个窄带随机。前两种是随机试验,后两种是混合型也可以归入随机试验。 电动振动台的工作原理是基于载流导体在磁场中受到电磁力作用的安培定律。 1.2 机械环境试验方法标准 电工电子产品环境试验国家标准汇编(第二版)2001年4月 汇编中汇集了截止目前我国正式发布实施的环境试验方面的国家标准72项,其中有近50项不同程度地采用IEC标准,内容包括:总则、名词术语、各种试验方法、试验导则及环境参数测量方法标准。 其中常用的机械环境试验方法标准: (1)GB/T 2423.5-1995 电工电子产品环境试验第2部分:试验方法 试验Ea和导则:冲击 (2)GB/T 2423.6-1995 电工电子产品环境试验第2部分:试验方法 试验Eb和导则:碰撞 (3)GB/T 2423.7-1995 电工电子产品环境试验第2部分:试验方法 试验Ec和导则:倾跌与翻倒(主要用于设备型产品) (4)GB/T 2423.8-1995 电工电子产品环境试验第2部分:试验方法 试验Ed和导则:自由跌落 (5)GB/T 2423.10-1995 电工电子产品环境试验第2部分:试验方法 试验Fc和导则:振动(正弦) (6)GB/T 2423.11-1997 电工电子产品环境试验第2部分:试验方法
旋翼的空气动力特点9页
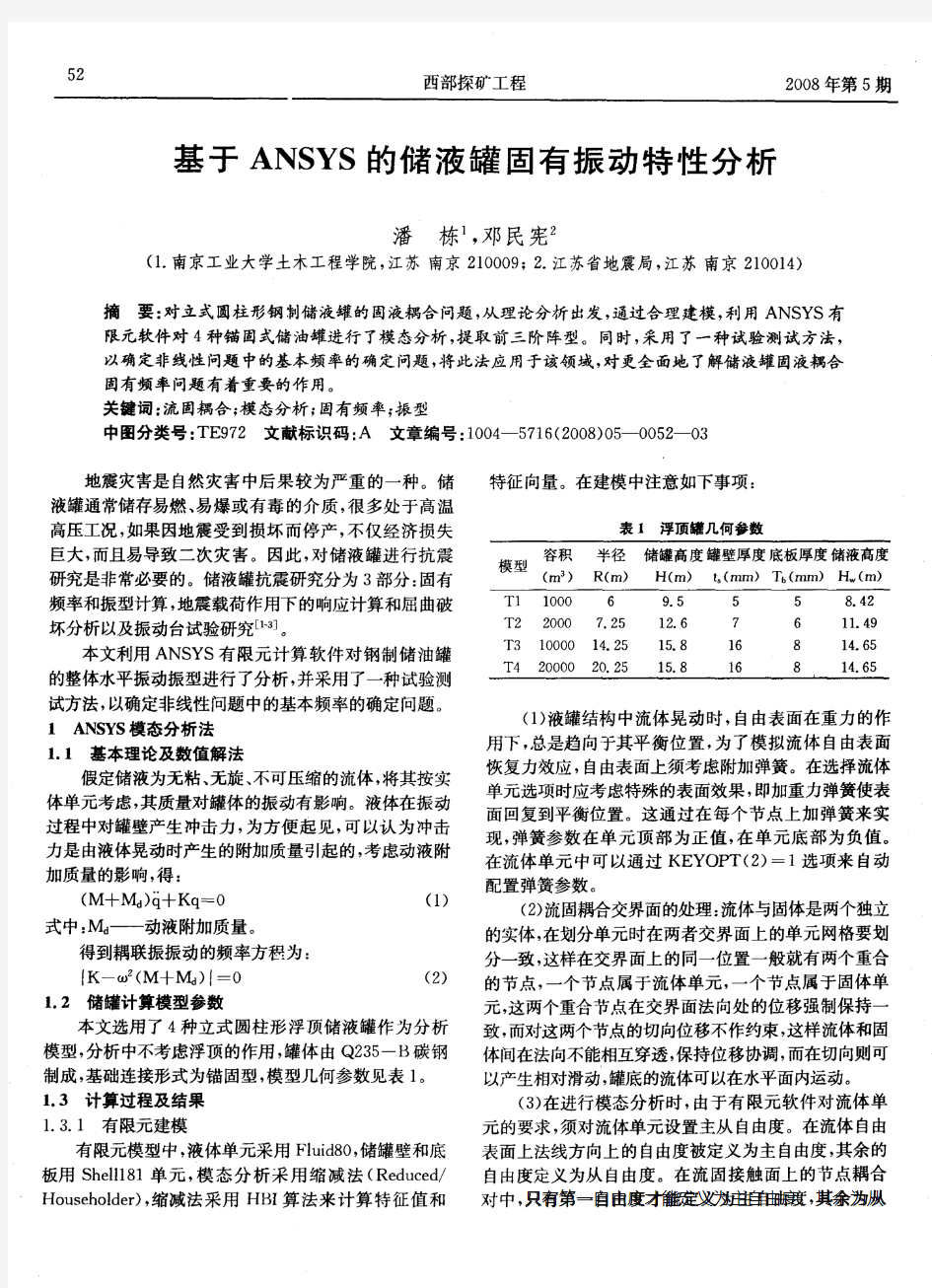
旋翼的空气动力特点 (1)产生向上的升力用来克服直升机的重力。即使直升机的发动机空中停车时,驾驶员可通过操纵旋翼使其自转,仍可产生一定升力,减缓直升机下降趋势。 (2)产生向前的水平分力克服空气阻力使直升机前进,类似于飞机上推进器的作用(例如螺旋桨或喷气发动机)。 (3)产生其他分力及力矩对直升机;进行控制或机动飞行,类似于飞机上各操纵面的作用。旋翼由数片桨叶及一个桨毂组成。工作时,桨叶与空气作相对运动,产生空气动力;桨毂则是用来连接桨叶和旋翼轴,以转动旋翼。桨叶一般通过铰接方式与桨毂连接。 旋翼的运动与固定翼飞机机翼的不,因为旋翼的桨叶除了随直升机一同作直线或曲线动外,还要绕旋翼轴旋转,因此桨叶空气动力现象要比机翼的复杂得多。 先来考察一下旋翼的轴向直线运动这就是直升机垂直飞行时旋翼工作的情况,它相当于飞机上螺旋桨的情况。由于两者技术要求不同,旋翼的直径大且转速小;螺旋桨的直径小而转速大。在分析、设计上就有所区别设一旋冀,桨叶片数为k,以恒定角速度Ω 绕轴旋转,并以速度Vo沿旋转轴作直线运动。如果在想象中用一中心轴线与旋翼轴重合,而半径为r的圆柱面把桨叶裁开(参阅图2,1—3),并将这圆柱面展开成平面,就得到桨叶剖面。既然这时桨叶包括旋转运动和直线运动,对于叶剖面来说,应有用向速度(等于Ωr)和垂直于旋转平面的速度(等于Vo),而合速度是两者的矢量和。显然可以看出(如图2.1—3),用不同半径的圆柱面所截出来的各个桨叶剖面,他们的合速度是不同的:大小不同,方向也不相同。如果再考虑到由于桨叶运动所激起的附加气流速度(诱导速度) ),那么桨叶各个剖面与空气之间的相对速度就更加不同。与机翼相比较,这就是桨叶工作条件复杂,对它的分析比较麻烦的原因所在。 旋翼拉力产生的滑流理论 现以直升机处于垂直上升状态为例,应用滑流理论说明旋翼拉力产生的原因。此时,将流过旋翼的空气,或正确地说,受到旋翼作用的气流,整个地看做一根光滑流管加以单独处理。假设: 空气是理想流体,没有粘性,也不可压缩; 旋转着的旋冀是一个均匀作用于空气的无限薄的圆盘(即桨盘),流过桨盘的气流速度在桨盘处各点为一常数; 气流流过旋翼没有扭转(即不考虑旋翼的旋转影响),在正常飞行中,滑流没有周期性的变化。 根据以上假设可以作出描述旋翼在:垂直上升状态下滑流的物理图像,如下图所示,图中选取三个滑流截面,So、S1和S2,在So面,气流速度就是直升机垂直上升速度Vo,压强为大气压Po,在S1的上面,气流速度增加到V1= Vo+v1,压强为P1上,在S1 的下面,由于流动是连续的,所以速度仍是V1,但压强有了突跃Pl下>P1上,P1下一P1上即旋翼向上的拉力。在S2面,气流速度继续增加至V2=Vo+v2,压强恢复到大气压强Po。 这里的v1是桨盘处的诱导速度。v2是下游远处的诱导速度,也就是在均匀流场内或静止空气中所引起的速度增量。对于这种现象,可以利用牛顿第三用动定律来解释拉力产生的原因。 旋翼的锥体
转动设备常见振动故障频谱特征案例分析
转动设备常见振动故障频谱特征及案例分析 一、不平衡 转子不平衡是由于转子部件质量偏心或转子部件出现缺损造成的故障,它是旋转机械最常见的故障。结构设计不合理,制造和安装误差,材质不均匀造成的质量偏心,以及转子运行过程中由于腐蚀、结垢、交变应力作用等造成的零部件局部损坏、脱落等,都会使转子在转动过程中受到旋转离心力的作用,发生异常振动。 转子不平衡的主要振动特征: 1、振动方向以径向为主,悬臂式转子不平衡可能会表现出轴向振动; 2、波形为典型的正弦波; 3、振动频率为工频,水平与垂直方向振动的相位差接近90度。 案例:某装置泵轴承箱靠联轴器侧振动烈度水平13.2 mm/s,垂直11.8mm /s,轴向12.0 mm/s。各方向振动都为工频成分,水平、垂直波形为正弦波,水平振动频谱如图1所示,水平振动波形如图2所示。再对水平和垂直振动进行双通道相位差测量,显示相位差接近90度。诊断为不平衡故障,并且不平衡很可能出现在联轴器部位。
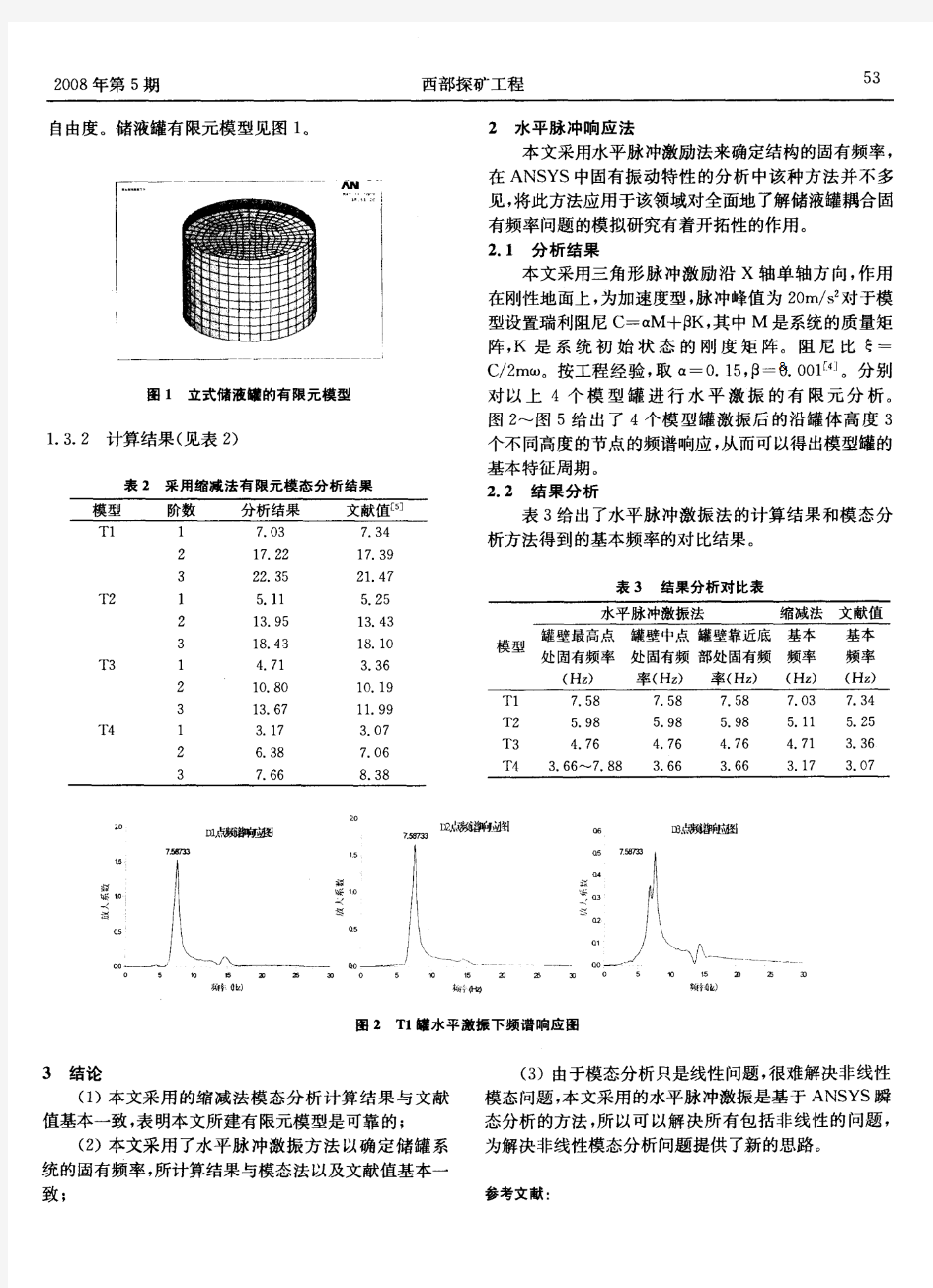
解体检查未见零部件的明显磨损,但联轴器经检测存在质量偏心,动平衡操作时对联轴器相应部位进行打磨校正后振动降至2.4 mm/s。 二、不对中 转子不对中包括轴系不对中和轴承不对中两种情况。轴系不对中是指转子联接后各转子的轴线不在同一条直线上。轴承不对中是指轴颈在轴承中偏斜,轴颈与轴承孔轴线相互不平行。通常所讲不对中多指轴系不对中。 不对中的振动特征: 1、最大振动往往在不对中联轴器两侧的轴承上,振动值随负荷的增大而增高;
2、平行不对中主要引起径向振动,振动频率为2倍工频,同时也存在工频和多倍频,但以工频和2倍工频为主; 3、平行不对中在联轴节两端径向振动的相位差接近180度; 4、角度不对中时,轴向振动较大,振动频率为工频,联轴器两端轴向振动相位差接近180度。 案例:某卧式高速泵振动达16.0 mm/s,由振动频谱图(图3)可以看出,50 Hz(电机工频)及其2倍频幅值显著,且2倍频振幅明显高于工频,初步判定为不对中故障。再测量泵轴承箱与电机轴承座对应部位的相位差,发现接近180度。 解体检查发现联轴器有2根联接螺栓断裂,高速轴上部径向轴瓦有金属脱落现象,轴瓦间隙偏大;高速轴止推面磨损,推力瓦及惰性轴轴瓦的间隙偏大。检修更换高速轴轴瓦、惰性轴轴瓦及联轴器联接螺栓后,振动降到A区。 三、松动 机械存在松动时,极小的不平衡或不对中都会导致很大的振动。通常有三种类型的机械松动,第一种类型的松动是指机器的底座、台板和基础存在结构松动,或水泥灌浆不实以及结构或基础的变形,此类松动表现出的振动频谱主要为1x。第二种类型的松动主要是由于机器底座固定螺栓的松动或轴承座出现裂纹引起,其振动频谱除1X外,还存在相当大的2X分量,有时还激发出1/2X和3X振动
ansys各种结构单元介绍
一、单元分类 MP - ANSYS/Multiphysics DY - ANSYS/LS-Dyna3D FL - ANSYS/Flotran ME - ANSYS/Mechanical PR - ANSYS/Professional PP - ANSYS/PrepPost ST - ANSYS/Structural EM - ANSYS/Emag 3D ED - ANSYS/ED
LINK1 —二维杆单元 单元描述: LINK1单元有着广泛的工程应用,比如:桁架、连杆、弹簧等等。这种二维杆单元是杆轴方向的拉压单元,每个节点有2个自由度:沿节点坐标系x、y方向的平动。就象在铰接结构中的表现一样,本单元不承受弯矩。单元的详细特性请参考理论手册。三维杆单元的描述参见LINK8。 下图是本单元的示意图。 PLANE2 —二维6节点三角形结构实体单元 单元描述: PLANE2是与8节点PLANE82单元对应的6节点三角形单元。单元的位移特性是二次曲线,适合于模拟不规则的网格(比如由不同的CAD/CAM系统得到的网格)。 本单元由六个节点定义,每个节点有2个自由度:沿节点坐标系x、y 方向的平动。本单元可作为平面单元(平面应力或平面应变)或者作为轴对称单元使用。本单元还具有塑性、蠕变、膨胀、应力刚化、大变形、大应变等功能。详细特性请参考理论手册。 下图是本单元的示意图。
BEAM3二维弹性梁单元 BEAM3是一个轴向拉压和弯曲单元,每个节点有3个自由度:沿节点坐标系x、y方向的平动和绕z轴的转动。单元的详细特性请参考理论手册。其它的二维梁单元是塑性梁单元(BEAM23)和变截面非对称梁单元(BEAM54)。 下图是本单元的示意图。 BEAM4三维弹性梁单元 单元描述: BEAM4是一个轴向拉压、扭转和弯曲单元,每个节点有6个自由度:沿节点坐标系的x、y、z方向的平动和绕x、y、z轴的转动。本单元具有应力刚化和大变形功能。在大变形(有限转动)分析中允许使用一致切线刚度矩阵选项。本单元的详细特性请参考理论手册。变截面非对称弹性梁单元的描述参见BEAM44,三维塑性梁单元的描述参见BEAM24。
发动机振动特性分析与试验
发动机振动特性分析与试验 作者:长安汽车工程研究院来源:AI汽车制造业 完善的项目前期工作预示着更少的项目后期风险,这也是CAE工作的重要意义之一。在整机开发的前期(概念设计和布置设计阶段),由于没有成熟样机进行NVH试验,很难通过试验的方法预测产品的NVH水平。因此,通过仿真的方法对整机NVH性能进行分析甚至优化显得十分重要。 众所周知,发动机NVH是个复杂的概念,包括发动机的振动、噪声以及个体对振动和噪声的主观评价等。客观地说,噪声与振动也相互联系,因为发动机一部分噪声由结构表面振动直接辐射,另一部分由发动机燃烧和进排气通过空气传播。除此之外,发动机附件(如风扇)也存在噪声贡献。本文仅考虑发动机结构振动问题,即在主轴承载荷、燃烧爆发压力和运动件惯性力的作用下,对发动机结构振动进行分析以及与试验的对比。发动机结构噪声的激励源主要包括燃烧爆发压力、气门冲击、活塞敲击、主轴承冲击、前端齿轮/链驱动和变速器激励等,这些结构振动又通过缸盖罩、缸盖、缸体和油底壳等传出噪声。 发动机结构振动分析方法简介 图1 发动机结构振动分析方法 如图1所示,发动机结构噪声分析方法包括以下几个步骤: 1. 动力总成FE建模及模态校核 建立完整的短发动机和变速器装配的有限元模型;对该有限元模型进行模态分析,通过分析结果判断各零件间连接是否完好;通过分析结果判断动力总成整体模态所在频率范围是否合理,零部件的局部模态频率是否合理,若存在整体或局部模态不合理的情况,需要对结构进行初步更改或优化。
2. 动力总成模态压缩 缩减有限元模型,得到动力总成的刚度、质量、几何以及自由度信息,用于多体动力学分析。 3. 运动件简化模型建立 发动机中的部分动件不用进行有限元建模,可作简化处理,形成梁-质量点模型,用于多体动力学分析。其中包括:活塞组、连杆组和曲轴及其前后端。 4. 动力总成多体动力学分析 在定义了动力总成各零部件间连接并且已知各种载荷的情况下,对动力总成进行时域下的多体动力学分析,并对得到的发动机时域和频域下的动态特性进行评判,同时,其输出用于结构振动分析。 5. 动力总成结构振动分析 基于多体动力学分析结果,对整个动力总成有限元模型进行强迫振动分析,得到发动机本体、变速器以及各种外围件的表面振动特性,进行评判和结构优化。 实例分析 1. 分析对象 以一款成熟的直列四缸1.5L发动机为平台,针对其结构振动问题,对其进行结构振动CAE 分析,并与其台架试验结果相比较。发动机的部分参数如下:缸径75mm,冲程85mm,缸间距84mm,最大缸压6MPa。 2. 坐标定义 为了便于以后叙述,对动力总成进行了坐标定义(见图2)。
第七章 ansys梁单元分析和横截面形状
第七章梁分析和横截面形状 7.1 梁分析概况 梁单元用于生成三维结构的一维理想化数学模型。与实体单元和壳单元相比,梁单元求解效率更高。 本章的内容只适用于 BEAM44(三维变截面单元)和另两种有限元应变单元 BEAM188 和 BEAM189 (三维梁单元)。这些梁单元与ANSYS 的其他梁单元相比,提供了更健壮的非线性分析能力,显著地改进了截面数据定义功能和可视化特性。参阅《ANSYS Elements Reference》中关于 BEAM44、BEAM188 和 BEAM189 单元的描述。 注意--如要对 BEAM44 单元采用本章论述的横截面定义功能,必须清楚不能应用这些功能来定义斜削的截面。此外,本章所述的后处理可视化功能不能应用于 BEAM44 单元。 注意--用户定义横截面功能可能不能应用CDWRITE命令。 7.2 何为横截面 横截面定义为垂直于梁轴的截面的形状。ANSYS提供有11种常用的梁横截面库,并支持用户自定义截面形状。当定义了一个横截面时,ANSYS 建立一个9节点的数值模型来确定梁的截面特性(Iyy,Izz 等),并求解泊松方程得到扭转特征。 图7-1是一个标准的Z型横截面,示出了截面的质心和剪切中心,以及计算得到的横截面特性。 图7-1 Z型横截面图
横截面和用户自定义截面网格将存储在横截面库文件中。如果用BEAM44、BEAM188、BEAM189 单元来模拟线实体,可用LATT命令将梁横截面属性赋予线实体。 7.3 如何生成横截面 用下列步骤生成横截面: 1、定义截面并与代表相应截面形状的截面号(Dection ID)关联。 2、定义截面的几何特性数值。 ANSYS 提供了表7-1 所列出的命令,可以完成横截面生成、查看、列表和操作横截面库的功能。 表7-1 ANSYS 横截面命令 命令GUI菜单路径目的 PRSSOL MainMenu>GeneralPostproc>ListRes ults> SectionSolutionUtilityMenu> List>Results>SectionSolution 打印梁截面结果 (BEAM44不支持) SECTYP E MainMenu>Preprocessor>Sections>- Beam-CommonSectnsMainMenu> Preprocessor>Sections>-Beam-Cust omSectns>ReadSectMesh 用SEID关联截面子类 型 SECDAT A MainMenu>Preprocessor>Sections>- Beam-CommonSectns 定义截面几何数据 SECOFF SET MainMenu>Preprocessor>Sections>- Beam-CommonSectnsMainMenu> Preprocessor>Sections>-Beam-Cust omSectns>ReadSectMesh 定义梁截面的截面偏 离 SECCON TROLS MainMenu>Preprocessor>Sections>- Beam-Add/Edit 覆盖程序计算的属性 值 SECNUM MainMenu>Preprocessor>-Attribute s-Define>DefaultAttribsMainMenu> Preprocessor>-Modeling-Create>El ements>ElemAttributes 识别关联到一个单元 的SECID
简谐振动特性研究实验
实验一、简谐振动特性研究与弹簧劲度系数测量【实验目的】 1. 胡克定律的验证与弹簧劲度系数的测量; 2. 测量弹簧的简谐振动周期,求得弹簧的劲度系数; 3. 测量两个不同弹簧的劲度系数,加深对弹簧的劲度系数与它的线径、外径关系的了解。 4. 了解并掌握集成霍耳开关传感器的基本工作原理和应用方法。 【实验原理】 1. 弹簧在外力作用下将产生形变(伸长或缩短)。在弹性限度内由胡克定律知:外力和它的变形量成正比,即: (1) (1)式中,为弹簧的劲度系数,它取决于弹簧的形状、材料的性质。通过测量和的对应关系,就可由(1)式推算出弹簧的劲度系数。 2. 将质量为的物体挂在垂直悬挂于固定支架上的弹簧的下端,构成一个弹簧振子,若物体在外力作用下(如用手下拉,或向上托)离开平衡位置少许,然后释放,则物体就在平衡点附近做简谐振动,其周期为: (2) 式中是待定系数,它的值近似为,可由实验测得,是弹簧本身的质量,而被称为弹簧的有效质量。通过测量弹簧振子的振动周期,就可由(2)式计算出弹簧的劲度系数。 3. 磁开关(磁场控制开关): 如图1所示,集成霍耳传感器是一种磁敏开关。在“1脚”和“2 脚”间加直流电压,“1脚”接电源正极、“2脚”接电源负极。当垂直于该传感器的磁感应强度大于某值时,该传感器处于“导通”状 态,这时处于“”脚和“”脚之间输出电压极小,近似为零,当磁感
强度小于某值时,输出电压等于“1脚”、“2脚”端所加的电源电压,利用集成霍耳开关这个特性,可以将传感器输出信号输入周期测定仪,测量物体转动的周期或物体移动所经时间。 【实验仪器】 FB737新型焦利氏秤实验仪1台,FB213A型数显计时计数毫秒仪 【实验步骤】 1. 用拉伸法测定弹簧劲度系数:(不使用毫秒仪) (1)按图2,调节底板的三个水平调节螺丝,使重锤尖端对准重锤基准的尖端。 (2)在主尺顶部安装弹簧,再依次挂入带配重的指针吊钩、砝码托盘,松开顶端挂钩锁紧螺钉,旋转顶端弹簧挂钩,使小指针正好轻轻靠在平面镜上(注意:力度要适当,若靠得太紧,可能会因摩擦太大带来附加的系统误差),以便准确读数。这时因初始砝码等已使弹簧被拉伸了一段距离。(可参考说明书中的装置图)
船舶原理 螺旋桨 螺距
第一章绪论 第二章螺旋桨的几何特征 一、主要内容 1、本课题的主要研究内容; 2、有效马力、机器马力、收到马力和传送效率、推进效率和推进系数的 概念; 3、螺旋桨的外形和名称及几何特征的有关专业术语。 二、重点内容 1、有效马力、机器马力、收到马力和传送效率、推进效率和推进系数的 概念; 2、桨叶数、桨的直径、螺距比和盘面比等概念。 三、教学方法 多媒体授课、结合螺旋桨模型组织教学 四、思考题 1、什么是有效马力、机器马力、收到马力和传送效率、推进效率和推进 系数? 2、表征螺旋桨几何特征的主要参数有哪些? 三、下讲主要内容 理想推进器理论。
第一章绪论 一、本课题的研究对象和内容 1、船舶快速性 船舶在给定主机马力(功率)情况下,在一定装载时于水中航行的快慢问题。 2、推进器 将能源(发动机)发出的功率转换为推船前进的功率的专门装置或机构。常见的推进器为螺旋桨。 3、主要内容 1)推进器在水中运动时产生推力的基本原理及其性能好坏; 2)螺旋桨的图谱设计方法。
二、马力及效率 1、有效马力P E 1)公制有效马力(本教材常用)2)英制有效马力式中,Te 为有效推力(kgf ),R 为阻力(kgf ),v 为船速(m/s )E ()7575P v Rv UShp =e =或hp T E ()7676P v Rv UKhp =e =T 思考:在船舶专业中常用的速度单位还有哪些?
2、主机马力和传送效率 推进船舶所需要的功率由主机供给,主机发出的马力 称为主机马力,以P S 表示。 主机马力经减速装置、推力轴承及主轴等传送至推进器,在主轴尾端与推进器联接处所量得的马力称为推进器 的收到马力,以P D 表示。 传送效率η s =P D / P S ,它反映了推力轴承、轴承地、 尾轴填料函及减速装置等的摩擦损耗。
ANSYS单元特性之命令流算例
EX1.1 (LINK1) (1)进入后处理模块,显示节点位移和杆件内力 MID_NODE = NODE (A/2,-B,0 )! 寻找距离位置(A/2,-B,0)最近的点,存入MID_NODE *GET,DISP,NODE,MID_NODE,U,Y!提取节点MID_NODE上的位移UY,若果已知要求的节点,直接提取即可。 LEFT_EL = ENEARN (MID_NODE)! 需找距离节点MID_NODE最近的单元,存入LEFT_EL ETABLE,STRS,LS,1! 用轴向应力SAXL的编号“LS,1”定义单元表STRS *GET,STRSS,ELEM,LEFT_EL,ETAB,STRS! 从单元表STRS中提取LEFT_EL单元的应力结果,存入变量STRSS。注意:提取的轴向应力结果具体到指定的单元。 (2)申明数组,提取计算结果,并比较计算误差 *DIM,LABEL,CHAR,2!定义2个元素的字符型数组LABEL *DIM,V ALUE,,2,3!定义2*3的数值型数组V ALUE LABEL(1) = 'STRS_MPa','DEF_mm' ! 给字符型数组的第1个元素赋值 *VFILL,V ALUE(1,1),DATA,1,-0.05498 ! 给其他数值型数组中的元素赋值 *VFILL,V ALUE(1,2),DATA,STRSS,DISP *VFILL,V ALUE(1,3),DATA,ABS(STRSS /1 ) ,ABS( DISP /0.05498 ) /OUT,EX1_1,out !将输出内容重定向到文件EX1_1.out /COM ! 以注释形式输出内容 /COM,------------------- EX1.1 RESULTS COMPARISON --------------------- /COM, /COM, | TARGET | ANSYS | RATIO /COM, *VWRITE,LABEL(1),V ALUE(1,1),V ALUE(1,2),V ALUE(1,3) (1X,A8,' ',F10.3,' ',F10.3,' ',1F5.3) /COM,---------------------------------------------------------------- /OUT ! 结束数据重定向,关闭输出文件 FINISH *LIST,EX1_1,out ! 列表显示文件EX1_1.out的内容 EX1.2 (LINK1) /PNUM, NODE,1!打开节点编号显示 /NUMBER, 2!只显示编号,不使用色彩 列表显示节点位移和单元的计算结果 PRDISP! 列表显示节点位移值计算结果 ETABLE, MFORX,SMISC,1!以杆单元的轴力为内容,建立单元表MFORX ETABLE, SAXL, LS, 1 !以杆的轴向应力为内容,建立单元表SAXL ETABLE, EPELAXL, LEPEL, 1! 以杆单元的轴向应变为内容,建立单元表EPELAXL PRETAB! 显示单元表中的计算结果
振动实验报告剖析
振动与控制系列实验 姓名:李方立 学号:201520000111 电子科技大学机械电子工程学院
实验1 简支梁强迫振动幅频特性和阻尼的测量 一、实验目的 1、学会测量单自由度系统强迫振动的幅频特性曲线。 2、学会根据幅频特性曲线确定系统的固有频率f 0和阻尼比。 二、实验装置框图 图3.1表示实验装置的框图 图3-1 实验装置框图 K C X 图3-2 单自由度系统力学模型 三、实验原理 单自由度系统的力学模型如图3-2所示。在正弦激振力的作用下系统作简谐强迫振动, 设激振力F 的幅值B 、圆频率ωo(频率f=ω/2π),系统的运动微分方程式为: 扫频信号源 动态分析仪 计算机系统及分析软件 打印机或 绘图仪 简支梁 振动传感器 激振器 力传感器 质量块 M
或 M F x dt dx dt x d M F x dt dx n dt x d F Kx dt dx C dt x d M /2/222 22 2 222=++=++=++ωξωω (3-1) 式中:ω—系统固有圆频率 ω =K/M n ---衰减系数 2n=C/M ξ---相对阻尼系数 ξ=n/ω F ——激振力 )2sin(sin 0ft B t B F πω== 方程①的特解,即强迫振动为: ) 2sin()sin(0?π?ω-=-=f A A x (3-2) 式中:A ——强迫振动振幅 ? --初相位 2 0222024)(/ωωωn M B A +-= (3-3) 式(3-3)叫做系统的幅频特性。将式(3-3)所表示的振动幅值与激振频率的关系用图形表示,称为幅频特性曲线(如图3-3所示): 3-2 单自由度系统力学模型 3-3 单自由度系统振动的幅频特性曲线 图3-3中,Amax 为系统共振时的振幅;f 0为系统固有频率,1f 、2f 为半功率点频率。 振幅为Amax 时的频率叫共振频率f 0。在有阻尼的情况下,共振频率为: 2 21ξ-=f f a (3-4) 当阻尼较小时,0f f a =故以固有频率0f 作为共振频率a f 。在小阻尼情况下可得 01 22f f f -= ξ (3-5) 1f 、2f 的确定如图3-3所示: M X C K
旋转机械振动的基本特性
旋转机械振动的基本特性 概述 绝大多数机械都有旋转件,所谓旋转机械是指主要功能由旋转运动来完成的机械,尤其是指主要部件作旋转运动的、转速较高的机械。 旋转机械种类繁多,有汽轮机、燃气轮机、离心式压缩机、发电机、水泵、水轮机、通风机以及电动机等。这类设备的主要部件有转子、轴承系统、定子和机组壳体、联轴器等组成,转速从每分钟几十到几万、几十万转。 故障是指机器的功能失效,即其动态性能劣化,不符合技术要求。例如,机器运行失稳,产生异常振动和噪声,工作转速、输出功率发生变化,以及介质的温度、压力、流量异常等。机器发生故障的原因不同,所反映出的信息也不一样,根据这些特有的信息,可以对故障进行诊断。但是,机器发生故障的原因往往不是单一的因素,一般都是多种因素共同作用的结果,所以对设备进行故障诊断时,必须进行全面的综合分析研究。 由于旋转机械的结构及零部件设计加工、安装调试、维护检修等方面的原因和运行操作方面的失误,使得机器在运行过程中会引起振动,其振动类型可分为径向振动、轴向振动和扭转振动三类,其中过大的径向振动往往是造成机器损坏的主要原因,也是状态监测的主要参数和进行故障诊断的主要依据。 从仿生学的角度来看,诊断设备的故障类似于确定人的病因:医生需要向患者询问病情、病史、切脉(听诊)以及量体温、验血相、测心电图等,根据获得的多种数据,进行综合分析才能得出诊断结果,提出治疗方案。同样,对旋转机械的故障诊断,也应在获取机器的稳态数据、瞬态数据以及过程参数和运行状态等信息的基础上,通过信号分析和数据处理提取机器特有的故障症兆及故障敏感参数等,经过综合分析判断,才能确定故障原因,做出符合实际的诊断结论,提出治理措施。 根据故障原因和造成故障原因的不同阶段,可以将旋转机械的故障原因分为几个方面,见表1。 表1 旋转机械故障原因分类
ANSYS中单元类型介绍和单元的选择原则
ANSYS中单元类型介绍和单元的选择原则ANSYS中单元类型的选择 初学ANSYS的人,通常会被ANSYS所提供的众多纷繁复杂的单元类型弄花了眼,如何选择正确的单元类型,也是新手学习时很头疼的问题。 类型的选择,跟你要解决的问题本身密切相关。在选择单元类型前,首先你要对问题本身有非常明确的认识,然后,对于每一种单元类型,每个节点有多少个自由度,它包含哪些特性,能够在哪些条件下使用,在ANSYS的帮助文档中都有非常详细的描述,要结合自己的问题,对照帮助文档里面的单元描述来选择恰当的单元类型。 1.该选杆单元(Link)还是梁单元(Beam)? 这个比较容易理解。杆单元只能承受沿着杆件方向的拉力或者压力,杆单元不能承受弯矩,这是杆单元的基本特点。 梁单元则既可以承受拉,压,还可以承受弯矩。如果你的结构中要承受弯矩,肯定不能选杆单元。 对于梁单元,常用的有beam3,beam4,beam188这三种,他们的区别在于: 1)、beam3是2D的梁单元,只能解决2维的问题。 2)、beam4是3D的梁单元,可以解决3维的空间梁问题。 3)、beam188是3D梁单元,可以根据需要自定义梁的截面形状。(常规是6个自由度,比如是用于桁架等框架结构,如鸟巢,飞机场的架构) 2.对于薄壁结构,是选实体单元还是壳单元? 对于薄壁结构,最好是选用shell单元,shell单元可以减少计算量,如果你非要用实体单元,也是可以的,但是这样计算量就大大增加了。而且,如果选实体单元,薄壁结构承受弯矩的时候,如果在厚度方向的单元层数太少,有时候计算结果误差比较大,反而不如shell单元计算准确。 实际工程中常用的shell单元有shell63,shell93。shell63是四节点的shell单元(可以退化为三角形),shell93是带中间节点的四边形shell单元(可以退化为三角形),shell93单元由于带有中间节点,计算精度比shell63更高,但是由于节点数目比shell63多,计算量会增大。对于一般的问题,选用shell63就足够了。
压电陶瓷振动的干涉测量实验报告
一、实验目 压电陶瓷振动的干涉测量实验报告 的与实验仪 器 1.实验目的 (1)了解压电陶瓷的性能参数;? (2)了解电容测微仪的工作原理,掌握电容测微仪的标定方法; ? (3)、掌握压电陶瓷微位移测量方法。 2.实验仪器 压电陶瓷材料(一端装有激光反射镜,可在迈克尔逊干涉仪中充当反射镜)、光学防震平台、半导体激光器、双踪示波器、分束镜、反射镜、二维可调扩束镜、白屏、驱动电源、光电探头、信号线等。 二、实验原理 1. 压电效应 压电陶瓷是一种多晶体,它的压电性可由晶体的压电性来解释。晶体在机械力作用下,总的电偶极矩(极化)发生变化,从而呈现压电现象,因此压电陶瓷的压电性与极化、形变等有密切关系。 1) 正压电效应:压电晶体在外力作用下发生形变时,正、负电荷中心发生相对位移,在某些相对应的面上产生异号电荷,出现极化强度。对于各向异性晶体,对晶体施加应力时,晶体将在 X,Y,Z 三个方向出现与应力成正比的极化强度,即: E = g·T(g为压电应力常数), 2) 逆压电效应:当给压电晶体施加一电场 E 时,不仅产生了极化,同时还产生形变,这种由电场产生形变的现象称为逆压电效应,又称电致伸缩效
应。这是由于晶体受电场作用时,在晶体内部产生了应力(压电应力),通过应力作用产生压电应变。存在如下关系: S = d·U(d为压电应变常数) 对于正和逆压电效应来讲, g和d 在数值上是相同的。 2. 迈克耳逊干涉仪的应用 迈克耳逊干涉仪可以测量微小长度。上图是迈克耳逊干涉仪的原理图。分光镜的第二表面上涂有半透射膜,能将入射光分成两束,一束透射,一束反射。分光镜与光束中心线成 45°倾斜角。M1和 M2为互相垂直并与分束镜都成 45°角的平面反射镜,其中反射镜 M1后附有压电陶瓷材料。 由激光器发出的光经分光镜后,光束被分成两路,反射光射向反射镜 M1(附压电陶瓷),透射光射向测量镜 M2(固定),两路光分别经 M1、M2反射后,分别经分光镜反射和透射后又会合,经扩束镜到达白屏,产生干涉条纹。M1和 M2与分光镜中心的距离差决定两束光的光程差。因而通过给压电陶瓷加电压使 M1随之振动,干涉条纹就发生变化。由于干涉条纹变化一级,相当于测量镜 M1移动了λ/2,所以通过测出条纹的变化数就可计算出压电陶瓷的伸缩量。 三、实验步骤 1)将驱动电源分别与光探头,压电陶瓷附件和示波器相连,其中压电陶瓷 附件接驱动电压插口,光电探头接光探头插口,驱动电压波形和光探头波形插口分别接入示波器 CH1 和 CH2; 2)在光学实验平台上搭制迈克尔逊干涉光路,使入射激光和分光镜成 45 度,反射镜 M1 和 M2与光垂直,M1 和 M2 与分光镜距离基本相等;
ansys关于薄板、厚板、壳单元的特性区别要点
一、板壳弯曲理论简介 1. 板壳分类 按板面内特征尺寸与厚度之比划分: 当L/h < (5~8) 时为厚板,应采用实体单元。 当(5~8) < L/h < (80~100) 时为薄板,可选2D 实体或壳单元 当L/h > (80~100) 时为薄膜,可采用薄膜单元。 壳类结构按曲率半径与壳厚度之比划分: 当R/h >= 20 时为薄壳结构,可选择薄壳单元。 当6 < R/h < 20 时为中厚壳结构,选择中厚壳单元。 当R/h <= 6 时为厚壳结构。 上述各式中h 为板壳厚度,L 为平板面内特征尺度,R 为壳体中面的曲率半径。2. 薄板理论的基本假定 薄板所受外力有如下三种情况: ①外力为作用于中面内的面内荷载。弹性力学平面应力问题。 ②外力为垂直于中面的侧向荷载。薄板弯曲问题。 ③面内荷载与侧向荷载共同作用。 所谓薄板理论即板的厚度远小于中面的最小尺寸,而挠度又远小于板厚的情况,也称为古典薄板理论。 薄板通常采用Kirchhoff-Love 基本假定: ①平行于板中面的各层互不挤压,即σz = 0。 ②直法线假定:该假定忽略了剪应力和所引起的剪切变形,且认为板弯曲时沿板厚方向各点的挠度相等。 ③中面内各点都无平行于中面的位移。 薄板小挠度理论在板的边界附近、开孔板、复合材料板等情况中,其结果不够精确。 3. 中厚板理论的基本假定 考虑横向剪切变形的板理论,一般称为中厚板理论或Reissner(瑞斯纳)理论。该理论不再采用直法线假定,而是采用直线假定,同时板内各点的挠度不等于中面挠度。 自Reissner 提出考虑横向剪切变形的平板弯曲理论后,又出现了许多精化理论。但大致分为两类,如Mindlin(明特林)等人的理论和Власов(符拉索夫)等人的理论。 厚板理论是平板弯曲的精确理论,即从3D 弹性力学出发研究弹性曲面的精确表达式。 4. 薄壳理论的基本假定 也称为Kirchhoff-Love(克希霍夫-勒夫)假定: ①薄壳变形前与中曲面垂直的直线,变形后仍然位于已变形中曲面的垂直线上,且其长度保持不变。
滚动轴承的振动信号特征分析报告
南昌航空大学实验报告 课程名称:数字信号处理 实验名称:滚动轴承的振动信号特征分析实验时间: 2013年5月14日 班级: 100421 学号: 10042134 姓名:吴涌涛 成绩:
滚动轴承的振动信号特征分析 一、实验目的 利用《数字信号处理》课程中学习的序列运算、周期信号知识、DFT 知识,对给定的正常轴承数据、内圈故障轴承数据、外圈故障轴承数据、滚珠故障轴承数据进行时域特征或频域特征提取和分析,找出能区分四种状态(滚动轴承的外圈故障、内圈故障、滚珠故障和正常状态)的特征。 二、实验原理 振动机理分析:机械在运动时,由于旋转件的不平衡、负载的不均匀、结构刚度的各向异性、间隙、润滑不良、支撑松动等因素,总是伴随着各种振动。 振动的幅值、频率和相位是振动的三个基本参数,称为振动三要素。 幅值:幅值是振动强度的标志,它可以用峰值、有效值、平均值等方法来表示。 频率:不同的频率成分反映系统内不同的振源。通过频谱分析可以确定主要频率成分及其幅值大小,从而寻找振源,采取相应的措施。 相位:振动信号的相位信息十分重要,如利用相位关系确定共振点、测量振型、旋转件动平衡、有源振动控制、降噪等。对于复杂振动的波形分析,各谐波的相位关系是不可缺少的。 在振动测量时,应合理选择测量参数,如振动位移是研究强度和变形的重要依据;振动加速度与作用力或载荷成正比,是研究动力强度和疲劳的重要依据;振动速度决定了噪声的高低,人对机械振动的敏感程度在很大频率范围内是由速度决定的。速度又与能量和功率有关,并决定动量的大小。 提取振动信号的幅域、时域、频域、时频域特征,根据特征进行故
障有无、故障类型和故障程度三个层次的判断。 三、 实验内容 Step1、使用importdata ()函数导入振动数据。 Step2、把大量数据分割成周期为单元的数据,分割方法为: 设振动信号为{x k }(k =1,2,3,…,n )采样频率为f s ,传动轴的转动速率为V r 。 采样间隔为: 1 s t f ?= (1) 旋转频率为: 60 r r V f = (2) 传动轴的转动周期为: 1 r T f = (3) 由式(1)和(3)可推出振动信号一个周期内采样点数N : 1 1s r r s f f T N t f f = ==? (4) 由式(2)可得到传动轴的转动基频f r =29.95Hz ,再由式(3)可得到一个周期内采样点数N=400.67,取N =400。 Step3、提取振动信号的特征,分析方法包括: 1、时域统计分析指标(波形指标(Shape Factor)、峰值指标(Crest Factor)、脉冲指标(Impulse Factor)、裕度指标(Clearance Factor)、峭度指标(KurtosisValue) )等,相关计算公式如下: (1)波形指标: P f X WK X = (5) 其中,P X 为峰值,X 为均值。p X 计算公式如下:
ANSYS中单元的选择
在结构分析中,“结构”一般指结构分析的力学模型。按几何特征和单元种类,结构可分为杆系结构、板壳结构和实体结构。杆系结构:其杆件特征是一个方向的尺度远大于其它两个方向的尺度,例如长度远大于截面高度和宽度的梁。元类型有杆、梁和管单元(一般单称为线单元)。板壳结构:是一个方向的尺度远小于其它两个方向尺度的结构,如平板结构和壳结构。单元为壳单元。实体结构:则是指三个方向的尺度约为同量级的结构,例如挡土墙、堤坝、基础等。单元为3D实体单元和2D 实体单元。 杆系结构: ①当构件15>L/h≥4时,采用考虑剪切变形的梁单元。(h为杆系的高度) ②当构件L/h≥15时, 采用不考虑剪切变形的梁单元。 ③BEAM18X系列可不必考虑L/h的值,但在使用时必须达到一定程度的网格密度。对于薄壁杆件结构,由于剪切变形影响很大,所以必须考虑剪切变形的影响。 板壳结构: 当L/h<5~8时为厚板,应采用实体单元。(h为板壳的厚度)当5~8
对于壳类结构,一般R/h≥20为薄壳结构,可选择薄壳单元,否则选择中厚壳单元。 对于既非梁亦非板壳结构,可选择3D实体单元。 杆单元适用于模拟桁架、缆索、链杆、弹簧等构件。该类单元只承受杆轴向的拉压,不承受弯矩,节点只有平动自由度。不同的单元具有弹性、塑性、蠕变、膨胀、大转动、大挠度(也称大变形)、大应变(也称有限应变)、应刚化(也称几何刚度、初始应力刚度等)等功能 ⑴杆单元均为均质直杆,面积和长度不能为零(LINK11无面积参数)。仅承受杆端荷载,温度沿杆元长线性变化。杆元中的应力相同,可考虑初应变。 ⑵LINK10属非线性单元,需迭代求解。LINK11可作用线荷载;仅有集中质量方式。 ⑶LINK180无实常数型初应变,但可输入初应力文件,可考虑附加质量;大变形分析时,横截面面积可以是变化的,即可为轴向伸长的函数或刚性的。 ⑷通常用LINK1和LINK8模拟桁架结构,如屋架、网架、网壳、桁架桥、桅杆、塔架等结构,以及吊桥的吊杆、拱桥的系杆等构件,必须注意线性静力分析时,结构不能是几何可
第三章 螺旋桨基础理论及水动力特性
第三章螺旋桨基础理论及水动力特性 关于使用螺旋桨作为船舶推进器的思想很早就已确立,各国发明家先后提出过很多螺旋推进器的设计。在长期的实践过程中,螺旋桨的形状不断改善。自十九世纪后期,各国科学家与工程师提出多种关于推进器的理论,早期的推进器理论大致可分为两派。其中一派认为:螺旋桨之推力乃因其工作时使水产生动量变化所致,所以可通过水之动量变更率来计算推力,此类理论可称为动量理论。另一派则注重螺旋桨每一叶元体所受之力,据以计算整个螺旋桨的推力和转矩,此类理论可称为叶元体理论。它们彼此不相关联,又各能自圆其说,对于解释螺旋桨性能各有其便利处,然亦各有其缺点。 其后,流体力学中的机翼理论应用于螺旋桨,解释叶元体的受力与水之速度变更关系,将上述两派理论联系起来而发展成螺旋桨环流理论。从环流理论模型的建立至今已有六十多年的历史,在不断发展的基础上已日趋完善。尤其近二十年来,由于电子计算机的发展和应用,使繁复的理论计算得以实现,并促使其不断完善。 虽然动量理论中忽略的因素过多,所得到的结果与实际情况有一定距离,但这个理论能简略地说明推进器产生推力的原因,某些结论有一定的实际意义,故在本章中先对此种理论作必要介绍,再用螺旋桨环流理论的观点分析作用在桨叶上的力和力矩,并阐明螺旋桨工作的水动力特性。至于对环流理论的进一步探讨,将在第十二章中再行介绍。 §3-1 理想推进器理论 一、理想推进器的概念和力学模型 推进器一般都是依靠拨水向后来产生推力的,而水流受到推进器的作用获得与推力方向相反的附加速度(通常称为诱导速度)。显然推进器的作用力与其所形成的水流情况密切有关。因而我们可以应用流体力学中的动量定理,研究推进器所形成的流动图案来求得它的水动力性能。为了使问题简单起见,假定: (1)推进器为一轴向尺度趋于零,水可自由通过的盘,此盘可以拨水向后称为鼓动盘(具有吸收外来功率并推水向后的功能)。 (2)水流速度和压力在盘面上均匀分布。 (3)水为不可压缩的理想流体。 根据这些假定而得到的推进器理论,称为理想推进器理论。它可用于螺旋桨、明轮、喷水推进器等,差别仅在于推进器区域内的水流断面的取法不同。例如,对于螺旋桨而言,其水流断面为盘面,对于明轮而言,其水流断面为桨板的浸水板面。 设推进器在无限的静止流体中以速度V A前进,为了获得稳定的流动图案,我们应用运动转换原理,即认为推进器是固定的,而水流自无穷远前方以速度V (鼓动盘)。图 A流向推进器 260
ansys各种单元及使用
ansys单元类型种类统计 单元名称种类单元号 LINK (共12种) 1,8,10,11,31,32,33,34,68,160,167,180 PLANE (共20种)2,13,25,35,42,53,55,67,75,77,78,82,83,121,145,146,162,182,183,223 BEAM (共09种)3,4,23,24,44,54,161,188,189 SOLID (共30 种)5,45,46,62,64,65,69,70,87,90,92,95,96,97,98,117,122,123,127,128,147,148,164,168, 185,186,187,191,226,227 COMBIN (共05种)7,14,37,39,40 INFIN (共04种)9,47,110,111 CONTAC (共05种)12,26,48,49,52 PIPE (共06种)16,17,18,20,59,60 MASS (共03种)21,71,166 MATRIX (共02种)27,50 SHELL (共19种)28,41,43,51,57,61,63,91,93,99,131,132,143,150,157,163,181,208,209 FLUID (共14种)29,30,38,79,80,81,116,129,130,136,138,139,141,142 SOURC (共01种)36 HYPER (共06种)56,58,74,84,86,158 VISCO (共05种)88,89,106,107,108 CIRCU (共03种)94,124,125 TRANS (共02种)109,126 INTER (共05种)115,192,193,194,195 HF (共03种)118,119,120 ROM (共01种)144 SURF (共04种)151,152,153,154 COMBI (共01种)165 TARGE (共02种)169,170 CONTA (共06种)171,172,173,174,175,178 PRETS (共01种)179 MPC (共01种)184 MESH (共01种)20