(完整word版)浙江中考数学压轴题汇编
压轴汇编
1. 某校数学课外小组,在坐标纸上为学校的一块空地设计植树方案如下:第k 棵树种植在
点)(k k k y x P ,处,其中11=x ,11=y ,当k ≥2时,
???
???
?
---+=----+=--]52[]51[])5
2[]51([5111k k y y k k x x k k k k ,[a ]表示非负实数a 的整数部分,例如[2.6]=2,[0.2]=0。按此方案,第2009棵树种植点的坐标为
A.(5,2009)
B.(6,2010)
C.(3,401) D (4,402) 2. 以正方形ABCD 的BC 边为直径作半圆O , 过点D 作直线切半圆于点F , 交AB 边于点E . 则三角形ADE 和直角梯形EBCD 周长之比为
(A) 3:4 (B) 4:5 (C) 5:6 (D) 6:7
3. 设1x ,2x 是关于x 的方程02
=++q px x 的两根,11+x ,12+x 是关于x 的方程
02=++p qx x 的两根,则p ,q 的值分别等于( )
(A )1,-3 (B )1,3 (C )-1,-3 (D )-1,3
4. 如图,在Rt ΔABC 中,AF 是斜边上的高线,且BD=DC=FC=1,则AC 的长为 (A )32 (B )3 (C )2 (D )3
3
4
4
5
5.如图,在等腰Rt ABC V 中,AC=BC,以斜边AB 为一边作等边ABD V ,使点C,D 在AB 的同侧;再以CD 为一边作等边CDE V ,使点C,E 落在AD 的异侧.若AE=1,则CD 的长为 ( )
(A)31- (B)
31
2- (C)62- (D)
62
-
填空
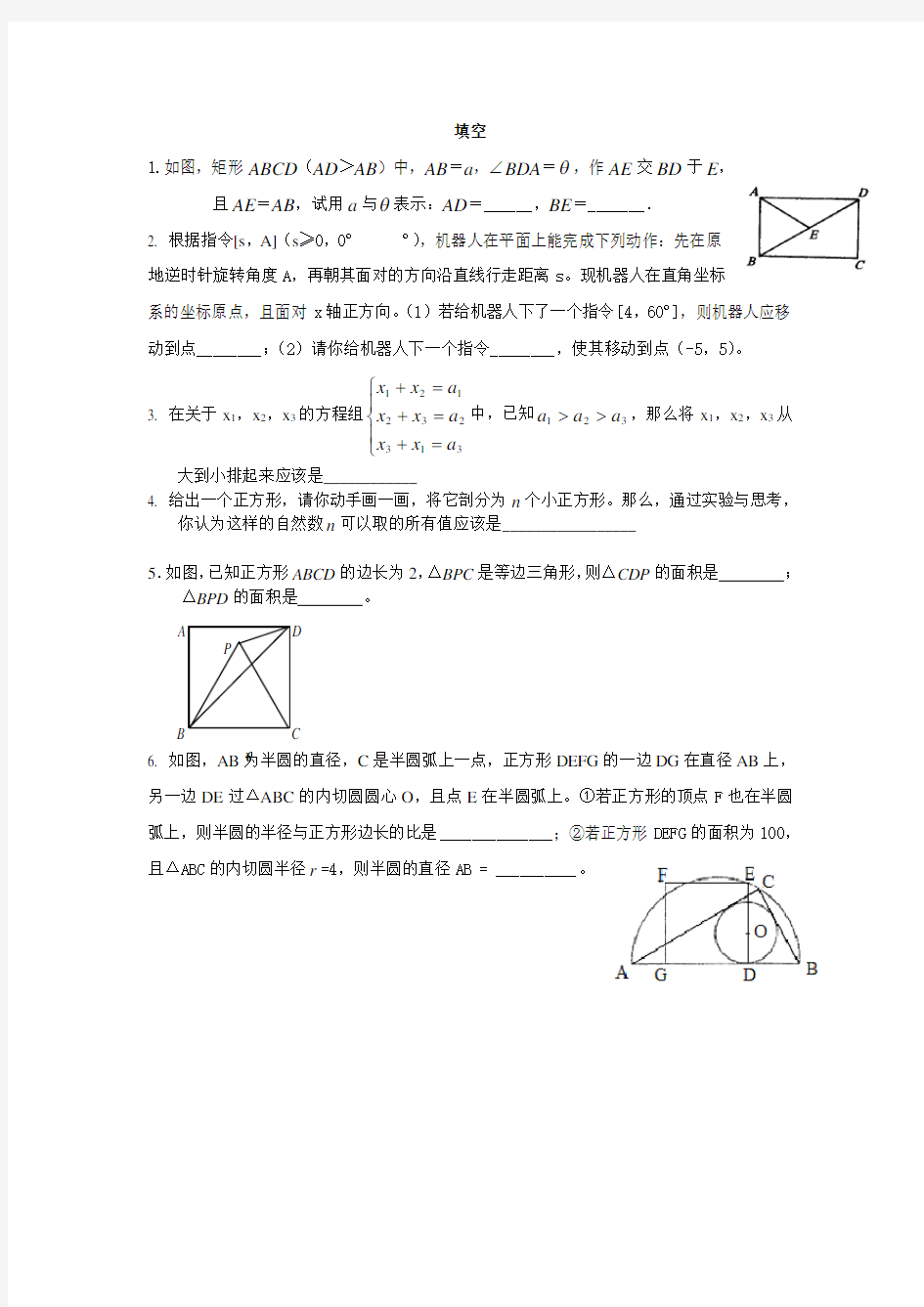
1.如图,矩形ABCD (AD >AB )中,AB =a ,∠BDA =θ,作AE 交BD 于E ,
且AE =AB ,试用a 与θ表示:AD =______,BE =_______.
2. 根据指令[s ,A](s ≥0,0o 系的坐标原点,且面对x 轴正方向。(1)若给机器人下了一个指令[4,60o],则机器人应移动到点________;(2)请你给机器人下一个指令________,使其移动到点(-5,5)。 3. 在关于x 1,x 2,x 3的方程组??? ??=+=+=+313 2321 21a x x a x x a x x 中,已知321a a a >>,那么将x 1,x 2,x 3从 大到小排起来应该是____________ 4. 给出一个正方形,请你动手画一画,将它剖分为n 个小正方形。那么,通过实验与思考, 你认为这样的自然数n 可以取的所有值应该是_________________ 5.如图,已知正方形ABCD 的边长为2,△BPC 是等边三角形,则△CDP 的面积是 ; △BPD 的面积是 。 6. 如图,AB 为半圆的直径,C 是半圆弧上一点,正方形DEFG 的一边DG 在直径AB 上, 另一边DE 过ΔABC 的内切圆圆心O ,且点E 在半圆弧上。①若正方形的顶点F 也在半圆弧上,则半圆的半径与正方形边长的比是______________;②若正方形DEFG 的面积为100,且ΔABC 的内切圆半径r =4,则半圆的直径AB = __________。 A B C D P 6 简答 1.已知抛物线经过坐标原点O 和x 轴上另一点E ,顶点M 的坐标为 (2,4);矩形ABCD 的顶点A 与点O 重合,AD 、AB 分别在x 轴、y 轴上,且AD=2,AB=3. (1)求该抛物线所对应的函数关系式; (2)将矩形ABCD 以每秒1个单位长度的速度从图22-1所示的位置沿x 轴的正方向匀 速平行移动,同时一动点P 也以相同的速度.....从点A 出发向B 匀速移动,设它们运动的时间为t 秒(0≤t ≤3),直线AB 与该抛物线的交点为N (如图22-2所示). ① 当t=25 时,判断点P 是否在直线ME 上,并说明理由; ② 设以P 、N 、C 、D 为顶点的多边形面积为S ,试问S 是否存在最大值?若存在,求出这个最大值;若不存在,请说明理由. 2.抛物线2 23y x x =-++与x 轴相交于A 、B 两点(点A 在点B 的左侧),与y 轴相交于点C ,顶点为D . (1)直接写出A 、B 、C 三点的坐标和抛物线的对称轴; (2)连接BC ,与抛物线的对称轴交于点E ,点P 为线段BC 上的一个动点,过点P 作PF DE ∥交抛物线于点F ,设点P 的横坐标为m ; ①用含m 的代数式表示线段PF 的长,并求出当m 为何值时,四边形PEDF 为平行四边形?②设BCF △的面积为S ,求S 与m 的函数关系式. 3、如图,在Rt △ABC 中,已知AB =BC =CA =4cm ,AD ⊥BC 于D ,点P 、Q 分别从B 、C 两点同时出发,其中点P 沿BC 向终点C 运动,速度为1cm/s ;点P 沿CA 、AB 向终点B 运动,速度为2cm/s ,设它们运动的时间为x(s)。 ⑴ 求x 为何值时,PQ ⊥AC ; ⑵ 设△PQD 的面积为y(cm 2),当0<x <2时,求y 与x 的函数关系式; ⑶ 当0<x <2时,求证:AD 平分△PQD 的面积; Q D C B A P O E D B C A Q P 4、ABC ?中,,4,5,D BC CD 3cm,C Rt AC cm BC cm ∠=∠==点在上,且以=现有两个动点P 、Q 分别从点A 和点B 同时出发,其中点P 以1cm/s 的速度,沿AC 向终点C 移动;点Q 以1.25cm/s 的速度沿BC 向终点C 移动。过点P 作PE ∥BC 交AD 于点E ,连结EQ 。设动点运动时间为x 秒。 (1)用含x 的代数式表示AE 、DE 的长度; (2)当点Q 在BD (不包括点B 、D )上移动时,设EDQ ?的面积为2 ()y cm ,求y 与月份x 的函数关系式,并写出自变量x 的取值范围; (3)当x 为何值时,EDQ ?为直角三角形。 5 6.如图,在平面直角坐标系中,点A(3,0),B(33,2),(0,2).动点D以每秒1个 单位的速度 从点0出发沿OC向终点C运动,同时动点E以每秒2个单位的速度从点A出发沿AB向终点B运动.过点E作EF上AB,交BC于点F,连结DA、DF.设运动时间为t秒. (1)求∠ABC的度数; (2)当t为何值时,AB∥DF; (3)设四边形AEFD的面积为S.①求S关于t的函数关系式; ②若一抛物线y=x2+mx经过动点E,当S<23时,求m的取值范围(写出答案 即可).