关于三维坐标转换参数的讨论
关于三维坐标转换参数的讨论
摘要:首先对坐标转换的物理意义进行解释,又把传统3个旋转角参数用反对称矩阵的3个元素代替,推出用3个和4个公共点直接计算转换参数的严密公式,在此基础上推导出严密的线性化公式。由于不用进行三角函数计算,只用简单加减乘除,也不用迭代计算,所以该模型计算速度快。
关键词:三维坐标转换;转换参数;转换矩阵;反对称矩阵;罗德里格矩阵
一、引言
三维直角坐标转换中,采用7参数Bursa2Wolf 模型、Molodensky 模型和武测模型[1 ] ,当在两坐标系统下有3 个公共点,就可惟一解算出7个转换参数;多余3个公共点时,就要进行平差计算,转换参数的初值(特别是旋转角) 的大小,直接影响平差系统稳定性和计算速度,有时使得解算的参数均严重偏离其值[2 ] 。随着移动测图系统(Mobile Mapping System ,简称MMS) 技术的成熟和应用,对运动载体(飞机、轮船、汽车等) 姿态的测量( GPS + INS) 也越来越多[3~5 ] ,任意角度的3 维坐标转换计算也越来越多。在平台上安装3 台或4 台GPS 接收机,来确定运动载体的位置和空间姿态,这时的旋转角可以说是任意的,取值范围是- 180°至180°,就需要准确计算转换参数模型,适应于任意旋转角的坐标转换。
本文在解释坐标转换的物理意义的基础上,导出3 维坐标转换7
参数直接计算的模型,以旋转矩阵的确定为核心,导出了3 点法和4 点法(两坐标系统下公共点数) ,用反对称矩阵和罗德里格矩阵性质推出的公式严密,该模型计算速度快。
二、三维坐标转换的物理意义和数学模型
1. 物理意义
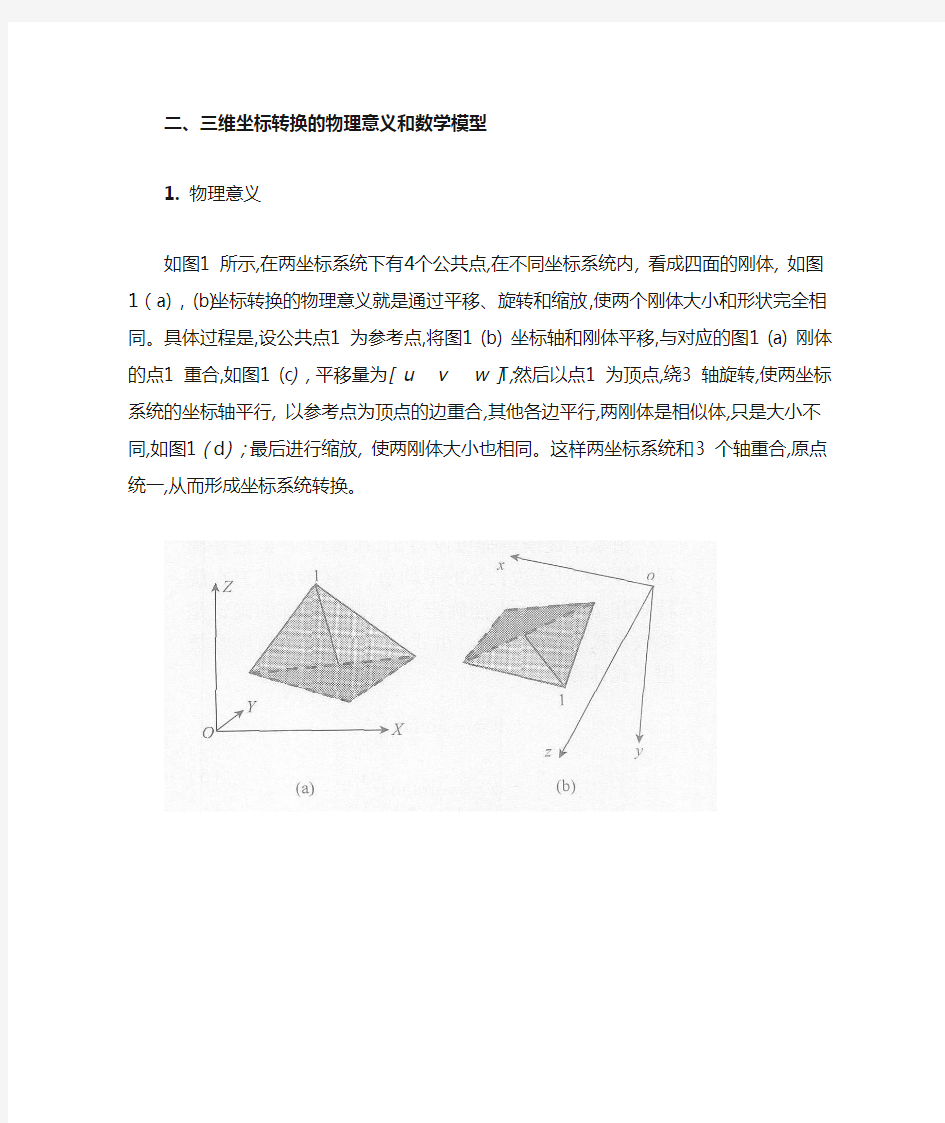
如图1 所示,在两坐标系统下有4个公共点,在不同坐标系统内, 看成四面的刚体, 如图1(a) , (b)坐标转换的物理意义就是通过平移、旋转和缩放,使两个刚体大小和形状完全相同。具体过程是,设公共点1 为参考点,将图1 (b) 坐标轴和刚体平移,与对应的图1 (a) 刚体的点1 重合,如图1 (c) , 平移量为[ u v w ]T;然后以点1 为顶点,绕3 轴旋转,使两坐标系统的坐标轴平行, 以参考点为顶点的边重合,其他各边平行,两刚体是相似体,只是大小不同,如图1 ( d) ; 最后进行缩放, 使两刚体大小也相同。这样两坐标系统和3 个轴重合,原点统一,从而形成坐标系统转换。
图1
2. 数学模型
根据坐标转换的物理过程,可得到数学模型
可见[ Xm Ym Zm ]T = [ XT1 - XS1 YT1 - YS1 ZT1
- ZS1 ]T ,进一步变为
式(2) 左边是目标坐标系统下的坐标, 右边(下标为S) 表示原坐标系统下坐标; [ΔX ΔY ΔZ ]T =R[ Xm Ym Zm ]T 为平移因子,其意义是参考点旋转后的坐标;λ为尺度因子; R 为坐标转换旋转矩阵,或转换矩阵, R = R3 R2 R1 , R1 是把原坐标绕Z
轴旋转θ角得到的旋转矩阵, R2 是绕新的X 轴旋转< 得到的旋转矩阵, R3 是绕新Y 轴旋转ψ得到的旋转矩阵。
(3)
所以
(4)
习惯上称ΔX ,ΔY ,ΔZ ,λ,θ, <,ψ为7 参数,后3个称为旋转参数或角度参数。
3. 模型参数确定的分析
由数学建模过程可以得出,尺度因子λ最好确定,是刚体对应边长比的平均值,平移参数只有在旋转矩阵R 确定后方能确定,所以旋
转矩阵的确定是参数直接解算的核心。由式(4)可知,3个角度参数用下式计算
(5)
但在任意条件下, 3个角取值范围是0°~360°, 具体大小无法判断,由式(3) 才能判断出具体大小。实际应用中,只要解出转换矩阵就能达到坐标转换的目的。设
是一个正交矩阵,其9个元素中只有3个是独
立的。又设反对称矩阵
,其元素是独立的。R 由S 构成罗德里格矩阵[6 ]
(6)
其中Δ= 1 + a2 + b2 + c2 。本文就是以反对称矩阵和罗德里格矩阵性质建立直接计算的公式。
三、3 点法计算转换参数公式
在已知两坐标系统下3个公共点计算7个参数的方法称为3 点法,其计算过程如下。
1.反对称矩阵和罗德里格矩阵性质
其中, I 是3 阶单位阵。
2. 转换参数直接解算
通过上述可知,转换参数的确定关键是旋转矩阵的确定,以下是根据反对称矩阵和罗德里格的性质,由3 个点计算转换参数的公式推导。由式(2) ,由公共点1 ,2 可列两组6 个方程, 用点2 方程减去点1 方程,消去平移参数,并把式(7c) 代入
或(8)
展开整理后得
(9)
上式只有两个独立方程,不能解出3 个未知数,用点1 ,3 可得一组方程,和式(9) 联合,取3 个
(10)
式中, u2 =λXS21 + XT21 , v2 =λYS21 + YT21 , w2 =λZS21+ ZT21 , u3 =λXS31 + XT31 , v3 =λYS31 + YT31
(11)
式中,ΔH = u3 v2 w2 - u2 v3 w2 , 由式(7a) 就可计算出转换矩阵,由式(2) 可得到平移参数
(12)
四、算例
以3 点计算为例,表1 列出原坐标系统和目标系统下3 个公共点坐标。
由此得到两坐标系统转换的数学模型为
本例设计的3个旋转角为55°19′42″,212°32′47″和140°45′22″。
五、结论
1. 该模型从理论上讲比较严密,原理简单,只用加减乘除就能计算,实现起来比较容易。
2. 由于是直接解算,所以无论参数值大小如何,转换参数都是比较接近真值的。
3. 适应任意旋转角情况下坐标转换,扩大了模型的应用范围。
4. 给出了线性化形式,当多于3 个公共点时,为进一步最小二乘法平差作了准备。
参考文献:
[1 ] 刘大杰,施一民,过静王君. 全球定位系统(GPS) 的原理与数据处理[M] . 上海:同济大学出版社, 1999.
[2 ] 曾文宪,陶本藻. 3 维坐标转换的非线性模型[J ] . 武汉大学学报(信息科学版) ,2003 ,28(5) :5662568.
[3 ] 刘根友. 一种GPS 测定姿态的新方法[J ] . 测绘科学, 2003 ,28(3) :36238.
[4 ] 赵建虎,刘经南,周丰年. GPS 测定船体姿态方法研究
[J ] . 武汉测绘科技大学学报,2000 ,25(4) :3532357.
[5 ] 郭英,卢秀山,等. 有限条件下坐标转换矩阵的确定
与精化[J ] . 测绘通报,2004 , (7) :325.
[6 ] 李德仁,郑肇保. 解析摄影测量学[M] . 北京:测绘出版社,1992.
手持GPS参数设置及全国各地坐标转换参数复习过程
如何设置手持GPS相关参数及全国各地坐标转换参数一、如何设置手持GPS相关参数 (一)手持GPS的主要功能 手持GPS,指全球移动定位系统,是以移动互联网为支撑、以GPS 智能手机为终端的GIS系统,是继桌面Gis、WebGis之后又一新的技术热点。目前功能最强的手持GPS,其集成GPRS通讯、蓝牙技术、数码相机、麦克风、海量数据存储、USB/RS232端口于一身,能全面满足您的使用需求。 主要功能:移动GIS数据采集、野外制图、航点存储坐标、计算长度、面积角度(测量经纬度,海拔高度)等各种野外数据测量;有些具有双坐标系一键转换功能;有些内置全国交通详图,配各地区地理详图,详细至乡镇村落,可升级细化。 (二)手持GPS的技术参数 因为GPS卫星星历是以WGS84大地坐标系为根据建立的,手持GPS单点定位的坐标属于WGS84大地坐标系。WGS84坐标系所采用的椭球基本常数为:地球长半轴a=6378137m;扁率F=1/298.257223563。 常用的北京54、西安80及国家2000公里网坐标系,属于平面高斯投影坐标系统。北京54坐标系,采用的参考椭球是克拉索夫斯基椭球,该椭球的参数为:地球长半轴a=6378245m;扁率F=1
/298.2。西安80坐标系,其椭球的参数为:地球长半轴 a=6378140m;扁率F=1/298.257。国家2000坐标系,其椭球的参数为:地球长半轴a=6378137m;扁率F=1/298.298.257222101。 (三)手持GPS的参数设置 要想测量点位的北京54、西安80及国家2000公里网高精度坐标数据,必须学习坐标转换的基础知识,并分别科学设置手持GPS的各项参数。 首先,在手持式GPS接收机应用的区域内(该区域不宜过大),从当地测绘部门收集1至两个已知点的北京54、西安80或国家2000坐标系统的坐标值;然后在对应的点位上读取WGS84坐标系的坐标值;之后采用《万能坐标转换》软件,可计算出DX、DY、DZ的值。 将计算出的DX、DY、DZ三个参数与DA、DF、中央经线、投影比例、东西偏差、南北偏差等六个常数值输入GPS接收机。将GPS接收机的网格转换为“UserGrid”格式,实际测量已知点的公里网纵、横坐标值,并与对应的公里网纵、横坐标已知值进行比较,二者相差较大时要重新计算或查找出现问题的原因。详细过程可查看《万能坐标转换》软件的【手持GPS参数设置】界面。 (四)自定义坐标系统(User)投影参数的确定
坐标转换工具说明书-1208
§10.2坐标转换工具 HGO 数据处理软件包提供了坐标转换程序,可以进行地方坐标与WGS-84坐标的相互转换,同时具备参数求解功能。 下面对这个工具进行介绍: 10.2.1概述 首先,介绍一下常见的三种坐标表示方法:经纬度和椭球高(BLH),空间直角坐标(XYZ),平面坐标和水准高程(xyh/NEU)。注意:椭球高是一个几何量,而水准高是一个物理量。 我们通常说的WGS-84坐标是经纬度和椭球这一种,北京54坐标是平面坐标和水准高程这一种,实质是有平面基准和高程基准组成的。 此外,再注意一下坐标转换的严密性问题,在同一个椭球里的纯几何转换都是严密的(BLH<->XYZ),而在不同的基准之间的转换是不严密的。举个例子,在WGS-84坐标和北京54坐标之间是不存在一套转换参数可以全国通用的,因为前者是一个地心坐标系,后者是一个参心坐标系。高程转换是由几何高向物理高转换。因此在每个地方必须用椭球进行局部拟合,通常用7参数模型来拟合。 那么,两个椭球间的坐标转换应该是怎样的呢?一般而言比较严密的是用七参数法(或称布尔莎模型),即X平移,Y平移,Z平移,X旋转,Y旋转,Z旋转,尺度变化K。要求得七参数就需要在一个地区需要3个以上的已知点(7个参数至少7个方程可解,所以需要三个点列出9个方程),如果区域范围不大、最远点间的距离不大于30Km(经验值)的情况可以用三参数,即X平移,Y平移,Z平移,而将X旋转,Y旋转,Z旋转,尺度变化K视为0,所以三参数只是七参数的一种特例。 七参数模型的实质是用一个局部椭球去拟合地方坐标系的形态;所以转换后获得的地方椭球高就是水准高。当然我们也可以把平面和高程两个方向分别进行拟合。例如平面用四参数模型拟合,高程方向则用二次曲面等模型来拟合。这样分开处理的模式相对七参数模型自由度更高。但是由于四参数模型参数较少,表达能力较弱,通常只用于小区域坐标转换。 综上所述,从实用的角度出发,坐标转换程序提供了两种转换策略供给客户选择使用: 1.七参数模型,一步得到地方平面和水准数据。 2.四参数加高程拟合模型,分两步得到地方平面和水准数据。 由于各厂家的模型和流程定义可能是不一样的,这里就我们公司的转换流程描述如下:七参数的转换过程是这样的:
空间三位坐标系|三维空间坐标系变换
1.已知a=(2,-1,3),b=(-1,4,-2),c=(7,5,λ),若a、b、c三向量共面,则实数λ等于( ) A.62 7 B.637 C.647 D.657 2.直三棱柱ABC—A1B1C1中,若CA A.a+b-c ?a,CB?b,CC1?c,则A1B? ( ) B.a-b+c C.-a+b+c D.-a+b-c3.已知a+b+c=0,|a|=2,|b|=3,|c|=,则向量a与b之间的夹角?a,b?为 ( ) A.30°B.45°C.60°D.以上都不对 4.已知△ABC的三个顶点为A(3,3,2),B(4,-3,7),C(0,5,1),则BC边上中线长( ) A.2 B.3 C.4 D.5 5.已知a?3i?2j?k,b?i?j?2k,则5a与3b的数量积等于( ) A.-15 B.-5 C.-3 D.-1 6.已知OA?(1,2,3),OB?(2,1,2),OP?(1,1,2),点Q在直线OP上运动,则当QA?QB 取得最小值时,点Q的坐标为( )
131123448A.(,,) B.(,,) C.(,,) 243234333D.(447,,)333二、填空题7.若向量a?(4,2,?4),b?(6,?3,2),则(2a?3b)?(a?2b)?__________________。 8.已知向量a?(2,?1,3),b?(?4,2,x),若a?b,则x?______;若a//b则x? ______。已知向量a?(3,5,1),b?(2,2,3),c?(4,?1,?3),则向量2a?3b?4c的坐标为 .14.如图正方体ABCD-A1B1C1D1中,E、F、G分别是B1B、AB、BC的中点. (1)证明D1F⊥平面AEG; (2)求cos?AE,D1B? 19.(14分)如图所示,直三棱柱ABC—A1B1C1中,CA=CB=1,∠BCA=90°,棱AA1=2,M、N分别是A1B1、A1A的中点. (1)求BN的长; (2)求cos的值; (3)求证A1B⊥C1M.
南方gps坐标转换参数设置
注:新版本已将"控制点坐标库"改为"求转换参数",实现的功能不变! 一、控制点坐标库的应用 GPS 接收机输出的数据是WGS-84 经纬度坐标,需要转化到施工测量坐标,这就需要软件进行坐标转换参数的计算和设置,控制点坐标库就是完成这一工作的主要工具。 控制点坐标库是计算四参数和高程拟合参数的工具,可以方便直观的编辑、查看、调用参与计算四参数和高程拟合参数的校正控制点。 利用控制点坐标库可以计算GPS 原始记录坐标到当地施工坐标的参数。在计算之前,需新建工程,输入当地的施工坐标系及中央子午线、投影高等。假设我们利用A、B 这两个已知点来求取参数,那么首先要有A、B 两点的GPS 原始记录坐标和测量施工坐标。 A、B 两点的GPS原始记录坐标的获取有两种方式: 一种是布设静态控制网,采用静态控制网布设时后处理软件的GPS 原始记录坐标; 另一种是GPS 移动站在没有任何校正参数起作用的Fixed(固定解)状态下记录的GPS 原始坐标。 1.1、校正参数 操作:工具→校正向导或设置→求转换参数(控制点坐标库) 所需已知点数:1个 校正参数是工程之星软件很特别的一个设计,它是结合国内的具体测量工作而设计的。校正参数实际上就是只用同一个公共控制点来计算两套坐标系的差异。根据坐标转换的理论,一个公共控制点计算两个坐标系误差是比较大的,除非两套坐标系之间不存在旋转或者控制的距离特别小。因此,校正参数的使用通常都是在已经使用了四参数或者七参数的基础上才使用的。
在工程之星新版本中,在校正向导中已经取消了两点校正功能,如果两个以上的已知点请使用控制点坐标库来求取参数。习惯使用校正向导的人请尽快学习新版本。 1.2 四参数 操作:设置→求转换参数(控制点坐标库) 四参数是同一个椭球内不同坐标系之间进行转换的参数。在工程之星软件中的四参数指的是在投影设置下选定的椭球内GPS 坐标系和施工测量坐标系之间的转换参数。工程之星提供的四参数的计算方式有两种,一种是利用“工具/参数计算/计算四参数”来计算,另一种是用“控制点坐标库”计算。。需要特别注意的是参予计算的控制点原则上至少要用两个或两个以上的点,控制点等级的高低和分布直接决定了四参数的控制范围。经验上四参数理想的控制范围一般都在5-7 公里以内。 四参数的四个基本项分别是:X 平移、Y 平移、旋转角和比例。 从参数来看,这里没有高程改正,所以建议采用“控制点坐标库”来求取参数,而根据已知点个数的不同所求取的参数也会不同,具体有以下几种。 1.2.1 四参数+校正参数 所需已知点个数:2个
三维坐标变换
第二章三维观察 1.三维观察坐标系 1.1观察坐标系 为了在不同的距离和角度上观察物体,需要在用户坐标系下建立观察坐标系x v,y v,z v(通常是右手坐标系)也称(View Reference Coordinate)。如下图所示,其中,点p0(x o, y o, z0)为观察参考点(View Reference Point),它是观察坐标系的原点。 图1.1 用户坐标系与观察坐标系 依据该坐标系定义垂直于观察坐标系z v轴的观察平面(view palne),有时也称投影平面(projection plane)。 图1.2 沿z v轴的观察平面 1.2观察坐标系的建立 观察坐标系的建立如下图所示:
图1.3 法矢量的定义 观察平面的方向及z v轴可以定义为观察平面(view plane)N 法矢量N: 在用户坐标系中指定一个点为观察参考点,然后在此点指定法矢量N,即z v轴的正向。 法矢量V:确定了矢量N后,再定义观察正向矢量V,该矢量用来建立y v轴的正向。通常的方法是先选择任一不平行于N的矢量V',然后由图形系统使该矢量V'投影到垂直于法矢量N的平面上,定义投影后的矢量为矢量V。 法矢量U:利用矢量N和V,可以计算第三个矢量U,对应于x z轴的正向。 的指定视图投影到显示设备表面上的过程来处理对象的描述。2.世界坐标系 在现实世界中,所有的物体都具有三维特征,但是计算机本身只能处理数字,显示二维的图形,将三维物体和二维数据联系到一起的唯一纽带就是坐标。为了使被显示的物体数字化,要在被显示的物体所在的空间中定义一个坐标系。该坐标系的长度单位和坐标轴的方向要适合被显示物体的描述。该坐标系被称为世界坐标系,世界坐标系是固定不变的。
手持GPS全参数设置及全国各地坐标转换全参数.docx
实用标准文档 如何设置手持 GPS 相关参数及全国各地坐标转换参数 一、如何设置手持GPS 相关参数 (一)手持 GPS的主要功能 手持 GPS,指全球移动定位系统,是以移动互联网为支撑、以GPS智能手机为终端的GIS系统,是继桌面 Gis、WebGis 之后又一新的技术热点。目前功能最强的手持GPS,其集成 GPRS通讯、蓝牙技术、数码相机、麦克风、海量数据存储、 USB/RS232 端口于一身,能全面满足您的使用需求。 主要功能:移动 GIS数据采集、野外制图、航点存储坐标、计算长度、面积角度(测 量经纬度,海拔高度)等各种野外数据测量;有些具有双坐标系一键转换功能;有些内置 全国交通详图,配各地区地理详图,详细至乡镇村落,可升级细化。 (二)手持 GPS的技术参数 因为 GPS卫星星历是以 WGS84 大地坐标系为根据建立的,手持 GPS单点定位 的坐标属于 WGS84 大地坐标系。 WGS84 坐标系所采用的椭球基本常数为:地球长半轴a=6378137m ;扁率 F=1 /298.257223563 。 常用的北京 54 、西安 80 及国家 2000 公里网坐标系,属于平面高斯投影坐标系统。北京 54 坐标系,采用的参考椭球是克拉索夫斯基椭球,该椭球的参数为:地球长半 轴a=6378245m;扁率F=1/298.2。西安80坐标系,其椭球的参数为:地球长半 轴a=6378140m;扁率F=1/298.257。国家2000坐标系,其椭球的参数为:地球长半轴 a=6378137m;扁率F=1/298. 257222101。 (三)手持 GPS的参数设置
要想测量点位的北京 54 、西安 80 及国家 2000 公里网高精度坐标数据,必须学 习坐标转换的基础知识,并分别科学设置手持 GPS的各项参数。 首先,在手持式 GPS接收机应用的区域内 (该区域不宜过大 ),从当地测绘部门收 集 1至两个已知点的北京 54 、西安 80 或国家 2000 坐标系统的坐标值;然后在对应的 点位上读取WGS84 坐标系的坐标值;之后采用《万能坐标转换》软件,可计算出DX 、DY、 DZ 的值。 将计算出的 DX 、 DY、 DZ 三个参数与 DA 、DF、中央经线、投影比例、东西偏差、南北偏差等六个常数值输入GPS接收机。将 GPS接收机的网格转换为 “UserGrid ”格式,实际测量已知点的公里网纵、横坐标值,并与对应的公里网纵、横坐标已知值进行比较,二者相差较大时要重新计算或查找出现问题的原因。详细 过程可查看《万能坐标转换》软件的【手持GPS参数设置】界面。 (四)自定义坐标系统(User )投影参数的确定 1、自己观测计算 新机拿到手之后,供应商都给提供一个投影参数,这对于要求不高的一般用户 来说基本可以满足工作需要,而对于一些专业用户来说,就要自己来测算参数。一 般型号的导航型手持GPS自定义坐标系统( User )投影参数设置界面都提供了五个 变量(△X、△Y、△Z、△A 、△F)需要设置,而实际工作中,后两个参数(△A 、△F)针对某一坐标系统来说为固定参数(北京 54 坐标系△A=-108 、△F=0.0000005 ),无需改动,需要自己测算的参数主要为前三个(△ X、△Y、△Z),一般称为三参数。 2、经验坐标
坐标转换问题
坐标转换问题 坐标转换问题的详细了解对于测量很重要,那么请和我一起来讨论这个问题。 首先,我们要弄清楚几种坐标表示方法。大致有三种坐标表示方法:经纬度和高程,空间直角坐标,平面坐标和高程。我们通常说的WGS-84坐标是经纬度和高程这一种,北京54坐标是平面坐标和高程着一种。 现在,再搞清楚转换的严密性问题,在同一个椭球里的转换都是严密的,而在不同的椭球之间的转换这时不严密的。举个例子,在WGS-84坐标和北京54坐标之间是不存在一套转换参数可以全国通用的,在每个地方会不一样,因为它们是两个不同的椭球基准。 那么,两个椭球间的坐标转换应该是怎样的呢?一般而言比较严密的是用七参数法,即X平移,Y平移,Z平移,X旋转,Y旋转,Z旋转,尺度变化K。要求得七参数就需要在一个地区需要3个以上的已知点,如果区域范围不大,最远点间的距离不大于30Km(经验值),这可以用三参数,即X平移,Y平移,Z平移,而将X旋转,Y旋转,Z旋转,尺度变化K 视为0,所以三参数只是七参数的一种特例。在本软件中提供了计算三参数、七参数的功能。 在一个椭球的不同坐标系中转换需要用到四参数转换,举个例子,在深圳既有北京54坐标又有深圳坐标,在这两种坐标之间转换就用到四参数,计算四参数需要两个已知点。本软件提供计算四参数的功能。 现在举个例子说明:在珠江有一个测区,需要完成WGS-84坐标到珠江坐标系(54椭球)的坐标转换,整个转换过程是这样的:
COORD软件使用说明: COORD软件采用文件化管理,用户可以将一种转换作为一个文件保存下来,下次使用时从文件菜单中选择打开这个文件来调用所有已有的转换参数。 实例一: 转换要求: 用户在一个佛山测区内使用RTK GPS接收机接受了一些点的WGS-84的坐标,现在希望将其转换为北京54和佛山坐标系下的坐标。用户有佛山测区的一些控制点,这些控制点有WGS-84坐标,也有北京-54坐标也有佛山坐标。 分析: WGS-84坐标和北京54坐标是不同两个椭球的坐标转换,所以要求得三参数或七参数,而北京54和佛山坐标都是同一个椭球,所以他们之间的转换是地方坐标转换,需要求得地
手持GPS参数设置及全国各地坐标转换参数17597
如何设置手持GPS相关参数及全国各地坐标转换参数、如何设置手持GPS相关参数 (一)手持GPS的主要功能 手持GPS,指全球移动定位系统,是以移动互联网为支撑、以GPS 智能手机为终端的GIS系统,是继桌面Gis、WebGis之后又一新的技术热点。目前功能最强的手持GPS,其集成GPRS通讯、蓝牙技术、数码相机、麦克风、海量数据存储、USB/RS232端口于一身,能全面满足您的使用需求。 主要功能:移动GIS数据采集、野外制图、航点存储坐标、计算长度、面积角度(测量经纬度,海拔高度)等各种野外数据测量;有些具有双坐标系一键转换功能;有些内置全国交通详图,配各地区地理详图,详细至乡镇村落,可升级细化。 (二)手持GPS的技术参数因为GPS卫星星历是以WGS84大地坐标系为根据建立的,手 持GPS单点定位的坐标属于WGS84大地坐标系。WGS84坐标系 所采用的椭球基本常数为:地球长半轴a=6378137m;扁率F=1 / 298.257223563。 常用的北京54、西安80及国家2000公里网坐标系,属于平面 高斯投影坐标系统。北京54坐标系,采用的参考椭球是克拉索夫 斯基椭球,该椭球的参数为:地球长半轴a=6378245m;扁率F=1
/298.2。西安 80坐标系,其椭球的参数为:地球长半轴 a=6378140m ;扁率F=1 /298.257。国家2000坐标系,其椭球的参 数为:地球长半轴 a=6378137m ;扁率 F=1 /298.298.257222101。 (三)手持GPS 的参数设置 要想测量点位的北京 54、西安80及国家2000公里网高精度坐 标数据,必须学习坐标转换的基础知识,并分别科学设置手持 GPS 的各项参数。 首先,在手持式GPS 接收机应用的区域内(该区域不宜过大), 从当地测绘部门收集 1至两个已知点的北京 54、西安80或国家 2000坐标系统的坐标值;然后在对应的点位上读取 WGS84坐标 系的坐标值;之后采用《万能坐标转换》软件,可计算出 DY 、DZ 的值。 将计算出的DX 、DY 、DZ 三个参数与DA 、DF 、中 投影比例、东西偏差、南北偏差等六个常数值输入 GPS 接收机。 将GPS 接收机的网格转换为“ UserGrid ”格式,实际测量已知点 的公里网纵、横坐标值,并与对应的公里网纵、横坐标已知值进 行比较, 二者相差较大时要重新计算或查找出现问题的原因。 细过程可查看《万能坐标转换》软件的【手持 GPS 参数设置】界 面。 (四)自定义坐标系统(User )投影参数的确定 DX 、 央经线、
北京54坐标系转换工具
北京54坐标系转换工具 利用ARCGIS进行自定义坐标系和投影转换 ARCGIS种通过三参数和其参数进行精确投影转换 注意:投影转换成54坐标系需要下载无偏移卫星图像进行转换,有偏移的转换将导致转换后的卫星图像扭曲,坐标错误,无法配准。 第一步:选择无偏移地图源,下载你所需要的卫星图像。 第二步:选择BIGEMAP软件右边工具栏,选择【投影转换】,如下图所示: 2.1 选择说明: 1. 源文件:选择下载好的卫星图像文件(下载目录中后缀为tiff的文件) 2. 源坐标系:打开的源文件的投影坐标系(自动读取,不需要手动填写) 3. 输出文件:选择转换后你要保持文件的文件路径和文件名 4. 目标坐标系:选择你要转换成的目标坐标系,如下图:
选择上图的更多,如下图所示: 1:选择 -Beijing 1954 2:选择地区3:选择分度带对应的带号(一般默认,也可以手动修改)
选择对应的分度带或者中央子午线(请参看:如何选择分度带?),点击【确定】 5. 重采样算法:投影转换需要将影像的像素重新排列,一次每种算法的效率不一样,一般选择【立方卷积采样】,以达到最好的效果。如下图: 6. 指定变换参数:在不知道的情况下,可以不用填此处信息,如果√上,则如下图:
此参数为【三参数】或者【七参数】,均为国家保密参数,需要到当地的测绘部门或者国土部门,以单位名义签保密协议进行购买,此参数各地都不一样,是严格保密的,请不要随便流通。 第三步:点击【确定】,开始转换,如下图:
第四步:完成后,打开你刚才选择的输出文件夹,里面就是转换后的卫星图像。 第五步:如果你需要套合你手里已经有的矢量文件,请参看:【BIGEMAP无偏移影像叠加配准】
手持GPS参数设置及全国各地坐标转换参数
如何设置手持GPS相关参数及全国各地坐标转换参数 一、如何设置手持GPS相关参数 (一)手持GPS的主要功能 手持GPS,指全球移动定位系统,是以移动互联网为支撑、以GPS智能手机为终端的GIS 系统,是继桌面Gis、WebGis之后又一新的技术热点。目前功能最强的手持GPS,其集成GPRS通讯、蓝牙技术、数码相机、麦克风、海量数据存储、USB/RS232端口于一身,能全面满足您的使用需求。 主要功能:移动GIS数据采集、野外制图、航点存储坐标、计算长度、面积角度(测量经纬度,海拔高度)等各种野外数据测量;有些具有双坐标系一键转换功能;有些置全国交通详图,配各地区地理详图,详细至乡镇村落,可升级细化。 (二)手持GPS的技术参数 因为GPS卫星星历是以WGS84坐标系为根据建立的,手持GPS单点定位的坐标属于WGS84坐标系。WGS84坐标系所采用的椭球基本常数为:地球长半轴a=6378137m;扁率F=1/298.257223563。 常用的54、80及国家2000公里网坐标系,属于平面高斯投影坐标系统。54坐标系,采用的参考椭球是克拉索夫斯基椭球,该椭球的参数为:地球长半轴 a=6378245m;扁率F=1/298.2。80坐标系,其椭球的参数为:地球长半轴a=6378140m;扁率F=1/298.257。国家2000坐标系,其椭球的参数为:地球长半轴a=6378137m;扁率F=1/298. 257222101。 (三)手持GPS的参数设置
要想测量点位的54、80及国家2000公里网高精度坐标数据,必须学习坐标转换的基础知识,并分别科学设置手持GPS的各项参数。 首先,在手持式GPS接收机应用的区域(该区域不宜过大),从当地测绘部门收集1至两个已知点的54、80或国家2000坐标系统的坐标值;然后在对应的点位上读取WGS84坐标系的坐标值;之后采用《万能坐标转换》软件,可计算出DX、DY、DZ 的值。 将计算出的DX、DY、DZ三个参数与DA、DF、中央经线、投影比例、东西偏差、南北偏差等六个常数值输入GPS接收机。将GPS接收机的网格转换为“UserGrid”格式,实际测量已知点的公里网纵、横坐标值,并与对应的公里网纵、横坐标已知值进行比较,二者相差较大时要重新计算或查找出现问题的原因。详细过程可查看《万能坐标转换》软件的【手持GPS参数设置】界面。 (四)自定义坐标系统(User)投影参数的确定 1、自己观测计算 新机拿到手之后,供应商都给提供一个投影参数,这对于要求不高的一般用户来说基本可以满足工作需要,而对于一些专业用户来说,就要自己来测算参数。一般型号的导航型手持GPS自定义坐标系统(User)投影参数设置界面都提供了五个变量(△X、△Y、△Z、△A、△F)需要设置,而实际工作中,后两个参数(△A、△F)针对某一坐标系统来说为固定参数(54坐标系△A=-108、△F=0.0000005),无需改动,需要自己测算的参数主要为前三个(△X、△Y、△Z),一般称为三参数。
坐标转换器使用说明
大地坐标(BLH) 平面直角坐标(XYZ) 四参数:X 平移、Y 平移、旋转角和比例 七参数:X平移,Y平移,Z 平移,X 轴旋转,Y 轴旋转,Z 轴旋转,缩放比例(尺度比) GPS控制网是由相对定位所求的的基线向量而构成的空间基线基线向量网,在GPS控制网的平差中,是以基线向量及协方差为基本观测量。 图3-1表示为HDS2003数据处理软件进行网平差的基本步骤,从图中可以看到,网平差实际上可以分为三个过程: l、前期的准备工作,这部分是用户进行的。即在网平差之前,需要进行坐标系的设置、并输入已知点的经纬度、平面坐标、高程等。 2、网平差的实际进行,这部分是软件自动完成的; 3、对处理结果的质量分析与控制,这部分也是需要用户分析处理的过程。 图3-1 平差过程 坐标系选择 针对不同的平差,要相应选择不同的坐标系,是否输入相应信息。在笔者接触过的项目中,平差时先通过三维无约束平差后,再进行二维约束平差。由于先进行的时三维无约束平差,是在WGS84坐标系统下进行的。 首先更改项目的坐标系统。在菜单“项目”->“坐标系统”或在工具栏“坐标系统”,则弹出“坐标
系统”对话框,选择WGS-84坐标。 图3-2 坐标系统 这里注意的是,在“投影”下见图,中央子午线是114°。很多情况下这里需要进行修改。 图3-3 WGS84投影 软件中自带的“中国-WGS 84”是允许修改的,我们换种方法:就是新建一个坐标文件,其他参数都和“中国-WGS84”一致,仅仅将中央子午线修改下。 在上图中,点击“新建”,得到“COORD GM”对话框,在“文件”->“新建”,如图
图3-4 新建坐标系统 然后在“设置”->“地图投影”,直接修改中央子午线,这里以81°为例,点击确定后,返回“COORD GM”对话框。 图3-5 投影设置 将输入源坐标和输入目标坐标的椭球,均改为WGS84。在“文件”->“保存”,输入名称和国家(中国),退出操作。
MAPGIS中坐标转换中七参数法
MAPGIS 中坐标转换中七参数法 京54坐标系和西安80坐标系之间的转换其实是两种不同的椭球参数之间的转换,一般而言比较严密的是用七参数布尔莎模型,即X 平移,丫平移,Z平移,X旋转(WX,丫旋转(WY,Z旋转(WY,尺度变化(DM。若得七参数就需要在一个地区提供3个以上的公共点坐标对(即北京54坐标下x、y、z和西安80坐标系下x、y、z),可以向地方测绘局获取。 下面具体的步骤: 启动“投影变换模块”,单击“文件”菜单下“打开文件”命 令,将演示数据“演示数据_北京54.WT、“演示数据_北京 54.WL、“演示数据—北京54.WP打开。1、单击“投影转换” 菜单下“S坐标系转换”命令,系统弹出“转换坐标值” “话框⑴、在“输入”一栏中,坐标系设置为“北京54坐标系”,单位设置为“线类单位—米”;⑵、在“输出”一栏中,坐标系设置为“西 安80坐标系”,单位设置为“线类单位—米”;⑶、在“转换方法”一栏中,单击“公共点操作求系数”项;⑷、在“输入”一栏中, 输入北京54坐标系下一个公共点的(x、y、z),如图2所示;⑸、在“输出”一栏中,输入西安80坐标系下对应的公共点的(x、y、z), 如图2所示;⑹、在窗口右下角,单击“输入公共点”按钮,右边的数字变为1,表示输入了一个公共点对,如图2所示;⑺、依照相同的方法,再输入另外的2个公共点对;⑻、在“转换方法”一
栏中,单击“七参数布尔莎模型”项,将右边的转换系数项激活;⑼、 单击“求转换系数”菜单下“求转换系数”命令,系统根据输入的3个公共点对坐标自动计算出7个参数,如图3所示,将其记录下来;2、单击“投影转换”菜单下“编辑坐标转换参数”命令,系统弹出“不同地理坐标系转换参数设置”对话框,如图4所示;在“坐标系选项”一栏中,设置各项参数如下:源坐标系:北京54坐标系;目的坐标系:西安80坐标系;转换方法:七参数布尔莎模型;长度单位:米;角度单位:弧度;然后单击“添加项”按钮,则在窗口左边的“不同椭球间转换”列表中将该转换关系列出;在窗口下方的“参数设置”一栏中,将上一步得到的七个参数依次输入到相应的文本框中,如图4所示;单击“修改项”按钮,输入转换关系,并单击“确定”按钮;接下来就是文件投影的操作过程了。 3、单击“投影转换”菜单下“ MAPGI毀影转换/选转换线文件”命令,系统弹出“选择文件”对话框 选中待转换的文件“演示数据_北京54.WL',单击“确定”按 钮; 4、设置文件的Tic点,在“投影变换”模块下提供了两种方法:手工设置和文件间拷贝,这里不作详细的说明; 5、单击“投影转换”菜单下“编辑当前投影参数”命令,系统弹出 “输入投影参数”对话框,如图6所示,根据数据的实际情况来设置 其地图参数坐标系类型:大地坐标系 椭球参数:北京54投影类型:高斯-克吕格投影比例尺分母:1坐标单
CORS坐标转换软件使用说明
坐标转换软件使用说明 1、功能介绍 在南京进行测量的同行一直受到坐标系统和已知控制点的困扰, 所以往往许多测量成果因坐标系统问题得不到承认,浪费了大量的人 力物力。基于此:本公司集全部精干技术力量,研发本款坐标转换软 件,可以说:它是全体测量工作者的福音。 南京CORS因为其免费,应用十分广泛,但是使用南京CORS在 很多情况下,因为已知控制点原因无法实地取得平面坐标而限制了 CORS优势的发挥。本软件可以实现基于南京CORS测量的WGS84 坐标与92南京地方坐标双向自由转换,转换精度与权威部门转换成 果比较(在南京市6800平方公里范围内,包括高淳、溧水、六合、 浦口):平面残差中误差优于±5mm、高程残差中误差均优于±1cm。精度完全具有保障,免去到处寻找控制点带来的人力、财力和时间浪费。按照最新城市规范规定,这种模式可以实现城市E级GPS控制 点的平面测量。 本软件是一款后处理软件,即:内业处理软件,它不能在实地计 算坐标,通过事后(采集)或事前(放样)数据处理,同样可以让你 在野外无忧无障碍开展工作。 适用平台:Windows 32位所有系统平台。 2、外业采集数据转换操作介绍 外业测量数据从RTK手簿中以WGS84坐标格式导出,导出以后 将文件复制到计算机,假设文件名为0513.dat。在电脑中启动软件,
界面如下: 图一:程序启动界面 首先选择转换方向下拉列表框,此时选择“WGS84—>NJ92”,表示将WGS84坐标转向92南京地方坐标,此时软件会出现一个按钮 键读入数据并转换,点击该按钮,在弹出的文件对话框中选择从手簿 导出的外业坐标文件。如:0513.dat,点击打开按钮即可完成转换。如图二: 图二:选择原始数据文件 记得一定要选择你的原始数据文件格式在点击打开按钮。转换完 成以后又会在对话框中再出现一个按钮导出转换成果,点击它即可将
球坐标系,三位坐标变换,旋转
球坐标系与直角坐标系的转换关系 球坐标是一种三维坐标。分别有原点、方位角、仰角、距离构成。 设P(x,y,z)为空间内一点,则点P也可用这样三个有次序的数r,φ,θ来确定,其中r为原点O与点P间的距离,θ为有向线段与z轴正向所夹的角,φ为从正z轴来看自x轴按逆时针方向转到有向线段的角,这里M为点P在xOy面上的投影。这样的三个数r,φ,θ叫做点P的球面坐标,这里r,φ,θ的变化范围为 r∈[0,+∞), φ∈[0, 2π], θ∈[0, π] . 当r,θ或φ分别为常数时,可以表示如下特殊曲面: r = 常数,即以原点为心的球面; θ= 常数,即以原点为顶点、z轴为轴的圆锥面; φ= 常数,即过z轴的半平面。 与直角坐标系的转换: 1).球坐标系(r,θ,φ)与直角坐标系(x,y,z)的转换关系: x=rsinθcosφ y=rsinθsinφ z=rcosθ 2).反之,直角坐标系(x,y,z)与球坐标系(r,θ,φ)的转换关系为: r= sqrt(x*2 + y*2 + z*2); φ= arctan(y/x); θ= arccos(z/r); 球坐标系下的微分关系: 在球坐标系中,沿基矢方向的三个线段元为: dl(r)=dr, dl(θ)=rdθ, dl(φ)=rsinθdφ 球坐标的面元面积是: dS=dl(θ)* dl(φ)=r^2*sinθdθdφ 体积元的体积为: dV=dl(r)*dl(θ)*dl(φ)=r^2*sinθdrdθdφ 球坐标系在地理学、天文学中有着广泛应用.在测量实践中,球坐标中的θ角称为被测点P(r,θ,φ)的方位角,90°-θ成为高低角。 生成旋转矩阵的一种简单方式是把它作为三个基本旋转的序列复合。关于右手笛卡尔坐标系
关于三维坐标转换参数的讨论
关于三维坐标转换参数的讨论
关于三维坐标转换参数的讨论 摘要:首先对坐标转换的物理意义进行解释,又把传统3个旋转角参数用反对称矩阵的3个元素代替,推出用3个和4个公共点直接计算转换参数的严密公式,在此基础上推导出严密的线性化公式。由于不用进行三角函数计算,只用简单加减乘除,也不用迭代计算,所以该模型计算速度快。 关键词:三维坐标转换;转换参数;转换矩阵;反对称矩阵;罗德里格矩阵 一、引言 三维直角坐标转换中,采用7参数Bursa2Wolf 模型、Molodensky 模型和武测模型[1 ] ,当在两坐标系统下有3 个公共点,就可惟一解算出7个转换参数;多余3个公共点时,就要进行平差计算,转换参数的初值(特别是旋转角) 的大小,直接影响平差系统稳定性和计算速度,有时使得解算的参数均严重偏离其值[2 ] 。随着移动测图系统(Mobile Mapping System ,简称MMS) 技术的成熟和应用,对运动载体(飞机、轮船、汽车等) 姿态的测量( GPS + INS) 也越来越多[3~5 ] ,任意角度的3 维坐标转换计算也越来越多。在平台上安装3 台或4 台GPS 接收机,来确定运动载体的位置和空间姿态,这时的旋转角可以说是任意的,取值范围是- 180°至180°,就需要准确计算转换参数模型,适应于任意旋转角的坐标转换。 本文在解释坐标转换的物理意义的基础上,导出3 维坐标转换7
参数直接计算的模型,以旋转矩阵的确定为核心,导出了3 点法和4 点法(两坐标系统下公共点数) ,用反对称矩阵和罗德里格矩阵性质推出的公式严密,该模型计算速度快。 二、三维坐标转换的物理意义和数学模型 1. 物理意义 如图1 所示,在两坐标系统下有4个公共点,在不同坐标系统内, 看成四面的刚体, 如图1(a) , (b)坐标转换的物理意义就是通过平移、旋转和缩放,使两个刚体大小和形状完全相同。具体过程是,设公共点1 为参考点,将图1 (b) 坐标轴和刚体平移,与对应的图1 (a) 刚体的点1 重合,如图1 (c) , 平移量为[ u v w ]T;然后以点1 为顶点,绕3 轴旋转,使两坐标系统的坐标轴平行, 以参考点为顶点的边重合,其他各边平行,两刚体是相似体,只是大小不同,如图1 ( d) ; 最后进行缩放, 使两刚体大小也相同。这样两坐标系统和3 个轴重合,原点统一,从而形成坐标系统转换。
大地坐标与大地空间坐标转换工具
#include "stdafx.h" #include
坐标系转换问题及转换参数的计算方法
坐标系转换问题及转换参数的计算方法 对于坐标系的转换,给很多GPS的使用者造成一些迷惑,尤其是对于刚刚接触的人,搞不明白到底是怎么一回事。我对坐标系的转换问题,也是一知半解,对于没学过测量专业的人来说,各种参数的搞来搞去实在让人迷糊。在我有限的理解范围内,我想在这里简单介绍一下,主要是抛砖引玉,希望能引出更多的高手来指点迷津。 我们常见的坐标转换问题,多数为WGS84转换成北京54或西安80坐标系。其中WGS84坐标系属于大地坐标,就是我们常说的经纬度坐标,而北京54或者西安80属于平面直角坐标。对于什么是大地坐标,什么是平面直角坐标,以及他们如何建立,我们可以另外讨论。这里不多罗嗦。 那么,为什么要做这样的坐标转换呢? 因为GPS卫星星历是以WGS84坐标系为根据而建立的,我国目前应用的地形图却属于1954年北京坐标系或1980年国家大地坐标系;因为不同坐标系之间存在着平移和旋转关系(WGS84坐标系与我国应用的坐标系之间的误差约为80),所以在我国应用GPS进行绝对定位必须进行坐标转换,转换后的绝对定位精度可由80提高到5-10米。简单的来说,就一句话,减小误差,提高精度。 下面要说到的,才是我们要讨论的根本问题:如何在WGS84坐标系和北京54坐标系之间进行转换。 说到坐标系转换,还要罗嗦两句,就是上面提到过的椭球模型。我们都知道,地球是一个近似的椭球体。因此为了研究方便,科学家们根据各自的理论建立了不同的椭球模型来模拟地球的形状。而且我们刚才讨论了半天的各种坐标系也是建立在这些椭球基准之上的。比如北京54坐标系采用的就是克拉索夫斯基椭球模型。而对应于WGS84坐标系有一个WGS84椭球,其常数采用IUGG第17届大会大地测量常数的推荐值。WGS84椭球两个最常用的几何常数:长半轴:6378137±2(m);扁率:1:298.257223563 之所以说到半长轴和扁率倒数是因为要在不同的坐标系之间转换,就需要转换不同的椭球基准。这就需要两个很重要的转换参数dA、dF。 dA的含义是两个椭球基准之间半长轴的差;dF的含义是两个椭球基准之间扁率倒数的差。 在进行坐标转换时,这两个转换参数是固定的,这里,我们给出在进行84—〉54,84—〉80坐标转换时候的这两个参数如下: WGS84>北京54:DA:-108;DF:0.0000005 WGS84>西安80:DA: -3 ;DF: 0 椭球的基准转换过来了,那么由于建立椭球的原点还是不一致的,还需要在dXdYdZ这三个空间平移参量,来将两个不同的椭球原点重合,这样一来才能使两个坐标系的椭球完全转换过来。而由于各地的地理位置不同,所以在各个地方的这三个坐标轴平移参量也是不同的,因此需要用当地的已知点来计算这三个参数。具体的计算方法是: 第一步:搜集应用区域内GPS“B”级网三个以上网点WGS84坐标系B、L、H值及我国坐标系(BJ54或西安80)B、L、h、x值。(注:B、L、H分别为大地坐标系中的大地纬度、大地经度及大地高,h、x分别为大地坐标系中的高程及高程异常。各参数可以通过各省级测绘局或测绘院具有“A”级、“B”级网的单位获得。) 第二步:计算不同坐标系三维直角坐标值。计算公式如下: X=(N+H)cosBcosL
手持GPS福建省坐标转换参数
福建省地区GPS坐标转换参数 福建省GPS坐标转换参数: 中央经线:E117或E114或E111 投影比例:+1.0000000 东西偏差:+500000.0 南北偏差:0.0 WGS-84转北京54坐标参数: 序 DX DY DZ DA DF 适宜地区 号 1 -7 -115 -48 -108 0.0000005 福州、宁德 2 -19 -116 -57 -108 0.0000005 漳州、泉州、厦门 3 -19 -120 -47 -108 0.0000005 南平、三明 4 -20 -123 -42 -108 0.000000 5 龙岩 5 -21 -120 -54 -108 0.0000005 莆田 备注:“坐标转换” 开机,按两秒“菜单”键进入主菜单页面,选择“设置”按“输入”键确定,选择坐标页面,在坐标系统下拉框中选择:“USER”按“输入”键确定,在坐标格式下拉框中选择:“USER UTM GRID”(自定义坐标值)。按“菜单”键,选择“自定义坐标格式”按“输入”进入自定义坐标格式页面,输入相关数值。按“输入”键储存,选择“自定义坐标系统”按“输入”进入,输入“DX.DY 等数值,按“输入”键储存即可。
手持GPS现有矿区转换参数: WGS-84转北京54坐标参数: 序 DX DY DZ DA DF 适宜地区 号 1 -22.5 -106.7 -49. 2 -108 0.0000005 尤溪峰岩矿区 2 -22.2 -112.7 -53.2 -108 0.0000005 将乐将溪井田 3 -21.1 -116.3 -50. 4 -108 0.000000 5 德化安石坑矿区 4 -22.4 -110.1 -47.7 -108 0.000000 5 清流仁场矿区 5 -21.1 -116.3 -50.4 -108 0.0000005 大田铭溪井田 6 -21. 7 -111.6 -48.7 -10 8 0.0000005 漳平员当井田 7 -106.7 -53.3 -0.1 -3 0 安溪角安(西安 80) 8 -21.5 -111.8 -51.5 -108 0.0000005 大田后洋
最新坐标转换器使用说明
坐标转换器使用说明
大地坐标(BLH) 平面直角坐标(XYZ) 四参数:X 平移、Y 平移、旋转角和比例 七参数:X平移,Y平移,Z 平移,X 轴旋转,Y 轴旋转,Z 轴旋转,缩放比例(尺度比) GPS控制网是由相对定位所求的的基线向量而构成的空间基线基线向量网,在GPS控制网的平差中,是以基线向量及协方差为基本观测量。 图3-1表示为HDS2003数据处理软件进行网平差的基本步骤,从图中可以看到,网平差实际上可以分为三个过程: l、前期的准备工作,这部分是用户进行的。即在网平差之前,需要进行坐标系的设置、并输入已知点的经纬度、平面坐标、高程等。 2、网平差的实际进行,这部分是软件自动完成的; 3、对处理结果的质量分析与控制,这部分也是需要用户分析处理的过程。
图3-1 平差过程 3.1 坐标系选择 针对不同的平差,要相应选择不同的坐标系,是否输入相应信息。在笔者接触过的项目中,平差时先通过三维无约束平差后,再进行二维约束平差。由于先进行的时三维无约束平差,是在WGS84坐标系统下进行的。 首先更改项目的坐标系统。在菜单“项目”->“坐标系统”或在工具栏“坐标系统”,则弹出“坐标系统”对话框,选择WGS-84坐标。
图3-2 坐标系统 这里注意的是,在“投影”下见图,中央子午线是114°。很多情况下这里需要进行修改。 图3-3 WGS84投影 软件中自带的“中国-WGS 84”是允许修改的,我们换种方法:就是新建一个坐标文件,其他参数都和“中国-WGS84”一致,仅仅将中央子午线修改下。 在上图中,点击“新建”,得到“COORD GM”对话框,在“文件”->“新建”,如图