鱼眼全景网络摄像机
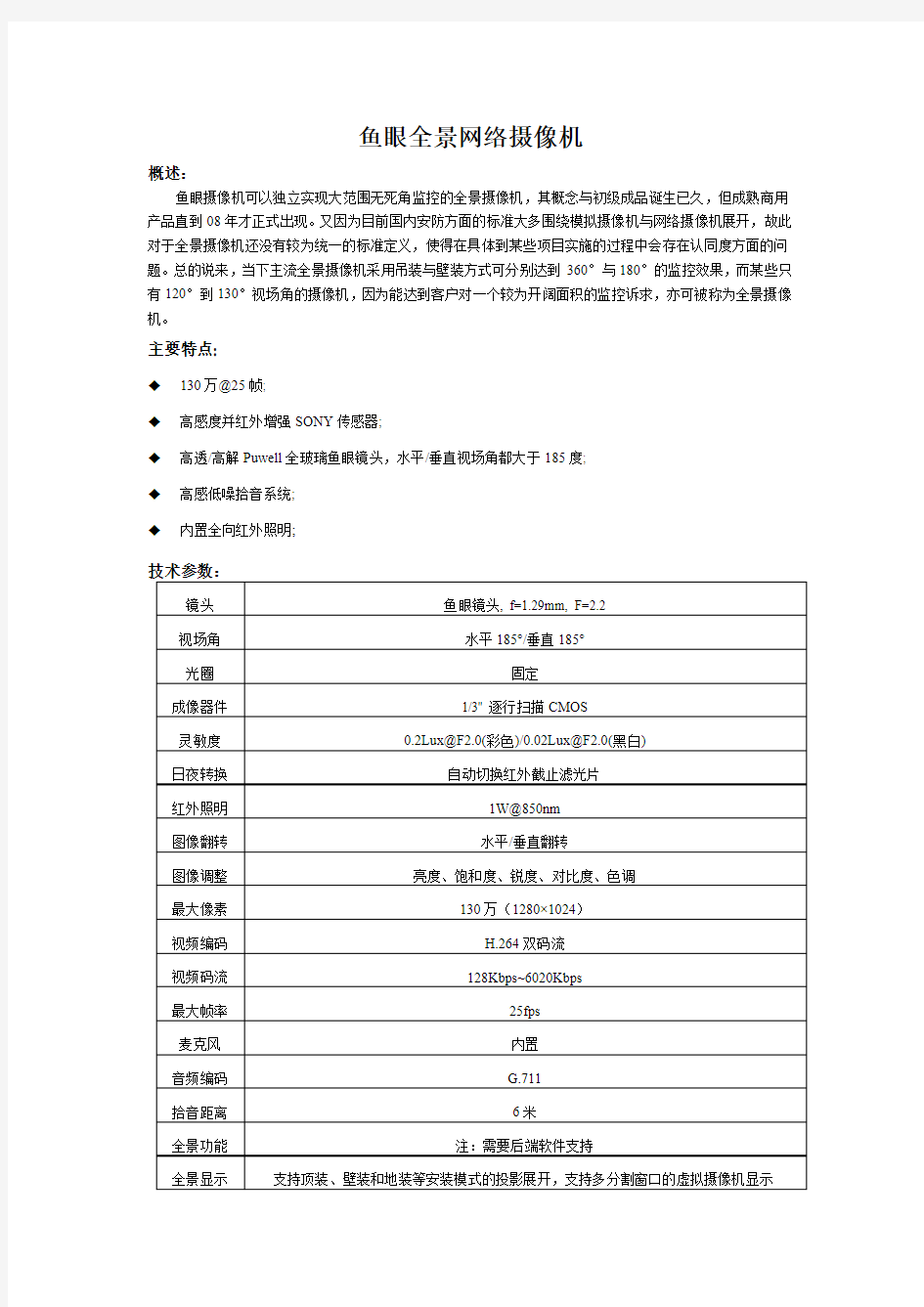
鱼眼全景网络摄像机
概述:
鱼眼摄像机可以独立实现大范围无死角监控的全景摄像机,其概念与初级成品诞生已久,但成熟商用产品直到08年才正式出现。又因为目前国内安防方面的标准大多围绕模拟摄像机与网络摄像机展开,故此对于全景摄像机还没有较为统一的标准定义,使得在具体到某些项目实施的过程中会存在认同度方面的问题。总的说来,当下主流全景摄像机采用吊装与壁装方式可分别达到360°与180°的监控效果,而某些只有120°到130°视场角的摄像机,因为能达到客户对一个较为开阔面积的监控诉求,亦可被称为全景摄像机。
主要特点:
◆130万@25帧;
◆高感度并红外增强SONY传感器;
◆高透/高解Puwell全玻璃鱼眼镜头,水平/垂直视场角都大于185度;
◆高感低噪拾音系统;
◆内置全向红外照明;
技术参数:
镜头鱼眼镜头, f=1.29mm, F=2.2
视场角水平185°/垂直185°
光圈固定
成像器件1/3" 逐行扫描CMOS
灵敏度0.2Lux@F2.0(彩色)/0.02Lux@F2.0(黑白)
日夜转换自动切换红外截止滤光片
红外照明1W@850nm
图像翻转水平/垂直翻转
图像调整亮度、饱和度、锐度、对比度、色调
最大像素130万(1280×1024)
视频编码H.264双码流
视频码流128Kbps~6020Kbps
最大帧率25fps
麦克风内置
音频编码G.711
拾音距离6米
全景功能注:需要后端软件支持
全景显示支持顶装、壁装和地装等安装模式的投影展开,支持多分割窗口的虚拟摄像机显示
数字云台支持DPTZ,数字平移/倾斜/变倍
移动侦测20×15区域侦测,侦测灵敏度1~6可调
告警触发移动侦测/视频遮挡/异常处理/告警输入
告警动作告警录像/图像抓拍,告警视频/图像上传(FTP/Email方式)协议TCP/IP,HTTP,DHCP,DNS,RTP/RTSP,FTP,PPPOE,SMTP,NTP 兼容性ONVIF2.0
通信接口1路RJ45 10M/100M 自适应以太网
电源接口?5.5-2.1mm 圆形DC插座
本机存储最大支持128G SD 卡
供电DC12V±10%,1A
功耗<5W
工作条件-15℃~+50℃@湿度10%~ 95%无凝结
存储条件-40℃~+75℃@湿度10%~ 95%无凝结
电磁兼容性CE,FCC
外壳PC,米色
防护等级IP50
产品尺寸Φ100*35mm
重量(kg)N.W.:0.2 / G.W.:0.3
鱼眼图像畸变校正算法
鱼眼图像畸变校正算法 司 磊 朱学玲 (安徽新华学院 信息工程学院 安徽 合肥 230088) 摘 要: 根据鱼眼镜头成像的特点,选择合适的图像畸变校正算法,标定鱼眼图像的中心和半径,用标定得到的参数进行校正,推出校正模型,方法简单,易于实现,并对鱼眼图的畸变矫正问题提出意见与看法。 关键词: 鱼眼图像;畸变矫正;图像预处理;图像增强 中图分类号:TP391 文献标识码:A 文章编号:1671-7597(2012)1110166-02 鱼眼图像的畸变矫正是以某种独特的变换方式将一副鱼眼 2 有关鱼眼图片的粗略校正 图像转换为理想图像的操作,这种操作在全方位视觉导航中具1)求取鱼眼图像行和列的比值 有重要的作用,是系统自动识别、跟踪和定位目标所必须的基将投射生成标准圆变换为鱼眼图片并求取图片中心点的方础操作。 法与普通相机照相原理不同,对于提取出来的鱼眼图片的轮1 畸变图像的校正原理 廓,我们先假定一个阈值,比如设一个灰度值30,用软件勾勒描绘出校正鱼眼图片大概的轮廓,然后先求出该轮廓的中心点根据畸变图像特点标定坐标图,求取标定点像素的理想值坐标,根据轮廓的图形和鱼眼图像的中心点的坐标,可计算出和实际值,同时生成坐标映射表,再把坐标映射表用于畸变图畸变图像的圆半径,从而求取鱼眼图像的中心点坐标和鱼眼图像的校正程序后,即可得到无畸变图像,具体处理过程如下: 像的粗略轮廓的图像的半径相对比,以便于将鱼眼图像的大概1)标定坐标 轮廓重新调整处理,变的更为精确和直观。假定畸变校正的鱼镜头中心的畸变可以忽略为零,以镜头为中心,离镜头越眼图片的半径中的行坐标曲线和列坐标曲线不相等,则我们需远的地方畸变越大。以镜头为中心标定坐标图,对图像进行坐要将畸变校正的鱼眼图像中的园的半径的曲线与下面的公式相标的标定,按正方形均匀排列圆点,如图1所示。 乘,然后就可以变换为普通的标准圆的图像。下面公式中(u,v)是畸变校正的鱼眼图片的中心点,β为畸变校正的鱼眼图像行和列的比值。 图1 2)图像预处理 先通过图像的、突出边缘细节;然后再用二值化处理增强调节对比度的图像,但部分样板点和背景的对比的差值较大,所以是设定一个阈值对整幅图像进行二值化,最后再对二值化后的图像再次进行中值滤波的方法处理,再次使用中值滤波方法可以有效的去除畸变图像中的部分椒盐噪声的影响。二值化的主要作用是可以提高畸变校正图像的质量,预处理图像可以为点阵样板圆点中心的确定提供重要的作用。 3)圆点中心的确定 由于图像畸变的影响,经过图像预处理后的畸变校正图像仍然是不规则的实心圆,然而样板中的确定的圆点却是规则排列的,所以可以在畸变校正的样板图像上把各个圆点的重心近似的2)鱼眼图片的粗略扭曲校正 替换为圆点中心,找出一个圆点的重心作为理想畸变校正样板图在得到中心点的坐标和校正形状之后,把扭曲的鱼眼图像像上与之对应的点,并找出该点处于二维平面坐标之中与之距离通过投射降低图像的扭曲程度变为正常的四方形的图像。 之和最大的圆点,从各个圆点的坐标之中找出与之距离之和最大在图2中,假设在没有扭曲的背景图像中,存在两个具有的圆点坐标,该点坐标即为畸变图像中与之相对应的点的坐标。相同x坐标的点,即k点和h点,并且在背景图像中随着圆上曲线再找出理想的点阵样板图像和该畸变校正图像中各圆点中心的位的经纬度的变大,扭曲程度也就越大,但是三维球面的整体从置,计算出点与点之间的垂直距离,即可得到点阵样板图像中各左到右的各个面的角度的差值全部都是相等的,而且在x轴方向点之间的偏移量,从而可以描绘和构建畸变校正图像上的各个点上与二维畸变校正图像相对应的线段dx的均匀分割经度或是纬之间偏移量的曲面。最后经过图像预处理过程的样板圆点中心的度也是相等的。因此在二维图像的X轴方向上任意点坐标经度或 确定,可计算出其它圆点中心的坐标位置。 图2
VR全景拍摄方法及拍摄技巧
https://www.360docs.net/doc/2c1369398.html, VR全景拍摄方法及拍摄技巧 关于拍照VR全景拍摄符合需求的相片如下:不知你是运用传统相机仍是数码相机,主张运用数码相机。以下以数码相机Nikon Coolpix990为例,传统相机拍照进程迥然不一样。 第一步:准备好相机(放入电池和存储卡,装置鱼眼镜头). 第二步:设置鱼眼镜头 1. 将快门旋转键旋至M-REC形式。 2. 两次按下MENU键,在LCD屏幕上显现Shooting菜单。 3. 用上下键挑选Lens项,按下右键选中Lens菜单。 4. 在Lens选项中挑选Fisheye 1选项,并按下右键承认。
https://www.360docs.net/doc/2c1369398.html, 5. LCD屏幕将退回至正常显现。 第三步:设置图象质量(1024X768 Fine格局) 1. 按住QUAL键,挑选图像格局(通常挑选XGA)。 2. 按下QUAL键,在"Normal", "Hi", "Fine", "Basic" 中挑选。当LCD 屏上呈现"FINE"字样时,按下右键选中。 3. 松开QUAL按键,退出此选项。 第四步:预设白平衡 1. 将快门上的开关按钮旋至M-ERC形式。 2. 按下MENU键,用上下键挑选White Balance项,按下右键选中。 3. 依据拍照时的具体情况挑选日光、白炽灯、荧光、多云等不一样的灯火装备选项。 第五步:设置曝光锁(使拍照的相片光圈、快门速度、感光度和白平衡共同) 1. 将快门上的开关按钮旋至M-ERC形式。
https://www.360docs.net/doc/2c1369398.html, 2. 按两下MENU键,选中Shooting菜单里的第二页。 3. 用上下键挑选AE锁,并按下右键选中它。 4. 用上下键挑选ON,并按下右键选中。 . 二、360全景拍照相片 第一步:装置三脚架和相机 1. 注意相机镜头和三脚架转轴处于同一中心点。 2. 三脚架云台、相机和镜头三者同地上要坚持水平。 第一步:装置三脚架和相机 1. 注意相机镜头和三脚架转轴处于同一中心点。 2. 三脚架云台、相机和镜头三者同地上要坚持水平。 第二步:拍照第一张相片按需求将相机装备好,将相机镜头对准前方,拍照第一张相片。
新手入门:了解鱼眼镜头
新手入门:了解鱼眼镜头 鱼眼镜头的特色是什么?有人说是等效焦段15mm以下的镜头,有人是说镜头前玉(最前面的镜片)采用圆弧型凸镜的镜头,还有人说是可摄角度达180度的镜头……这些答案都常会在鱼眼镜头上看到,但并非绝对。 不过,鱼眼镜头有个共通点,就是都有强烈的桶状变形。为了画面稳定舒适,广角镜头都需要解决桶状变形的问题,而鱼眼镜头正是放弃解决这个问题,所以能拍摄更宽广的画面。也因这样的画面与我们日常生活的视觉体验不同,所以拍出来的照片更容易瞬间吸引观赏者的眼球。 1. 什么是透视变形? 透视变形示范图。透视所造成的变形是平面画作或照片,表现立体感的重要元素。 想了解透视变形,可以尝试将相机架设在脚架上,小心调整水平后,此时如果是广角镜头,可以看到画面中的水平线会位于画面正中央,而垂直于水平的物体(如街道上一整排的路灯)会随距离远近而逐渐缩小,最后在画面正中心消失成为一点。
有趣的是,我们运用广角镜头拍摄时,并不会每次都追求水平拍摄,所以路灯、电线杆、建筑等垂直于路面的地标物,往往不会维持垂直状态,采用仰角或俯角拍摄时,画面中的垂直线就会往中央线聚拢,这是因为除了画面正中心的较远处外,我们在画面向上或是向下的位置又有了另一个消逝点,而产生的楔石扭曲现象就属于透视变形。 楔石扭曲现象: 楔石又称为拱心石,是古代拱型建筑的重要结构,形状为梯型,放置在中央正上方,用来契合、承受两边石材的压力。 当我们站在建筑下方拍摄建筑时,高楼会因为透视感,在照片上呈现出底部较宽、顶端较窄的形态,即变形为梯型而非原本的长方形,所以称这样的现象为“楔石扭曲现象”。 想要避免或减缓这样的变形现象,可以在较远的地方,使用中长焦段的镜头拍摄。最好能找到地势高的拍摄位置,用水平视角拍摄。当然,也可通过移轴镜来矫正,或者干脆用软件来拉直。 其实不只是广角镜头会有透视变形的问题,所有焦段都会有同样的状况,只不过在广角镜头中表现更明显。我们常看到形容广角镜头的“变形抑制良好”,并不意指矫正透视变形,而是在说明抑制桶状变形的能力。
720全景视频拍摄教程
在网络上要展示交互式的空间或物体效果时,大致有两种方法,一种是直接3d制作原始模型,然后贴图渲染在发布到网络上。另一种就是要涉及到全景。因为全景图片是直接从实物拍摄而成,只要前期的拍摄和后期的全景软件处理做得好的话,其真实感要好于用三维制作的效果。制作高质量的全景图片至少需要了解以下几个方面: 一、了解720丁丁猫全景视频和传统摄影的区别: 1.由于全景是要捕捉场景360°范围内的所有信息,所以一般用鱼眼镜头来拍摄(一般为视角等于或大于180°,焦距6mm~16mm之间的超广角镜头),鱼眼镜头镜片结构复杂,边缘和中央进光有差异,全景镜头无法使用遮光罩,无法使用偏光镜,除了sigma8mm能使用滤光片以外,大部分的全景镜头都无法使用等等。 2.720丁丁猫全景视频由于更多地需要后期的图像处理,更注重于数码摄影,而更多的摄影师目前还是使用传统的胶片相机。很显然数码摄影和胶片摄影的差别是相当大的,对同样的场景条件,用同样的参数,出来的结果可能相差非常远。数码摄影牵涉了太多电子的东西,发热了,振动了,冷了,光线太强了都难出好效果。 3.全景一般更侧重于表现场景的全局信息,所以720丁丁猫全景视频更注重选点,传统摄影更注重于构图。 4.全景更注重从全局光线去考虑,所以大部分的全景都是拍摄在晴朗的,光线充足的时候一般秋高气爽的时候,对场景整体光照比较讲究,世界的大部分720丁丁猫全景视频师都在大白天甚至烈日当中四处游曳,而传统摄影更喜欢早出晚归,在绝大部分光线条件下都可以拍出好的作品来。 5.全景在景深方面没有太多的选择余地;在有太多运动物体的场景里由于受拼合等限制无法有良好的发挥。 二、选择好的摄影设备: 720丁丁猫全景视频,您需要有一个好的数码照相机,一个鱼眼镜头,一个专业的全景头和一个性能优秀的脚架,推荐以下几个配套方案: Nikon Coolpix4500、990、995、5000、5700相机+ FC-E8、FC-E9鱼眼镜头+ kaidan kiwi系列云台、全视角4500全景头+脚架,Nikon D100 D1 D2H,Canon 1DS,Kordak14n数码相机+sigma8mm鱼眼镜头+manfrotto全景头+脚架。 以上设备已经过全景色友们的实践证明确实可行。如果采用传统相机+鱼眼镜头的,则要考虑用专业的底片扫描仪了。 三、选择光线环境: 全景不需要太多的光怪陆离,一般选择在能见度佳,气温低,空气纯净,光照充足的时候,秋高气爽的午后或者是晴空万里的海边,雪山,草地是出全景照片最好的地方,如果要拍夜
全景拍摄注意事项
360度全景照片拍摄注意事项 在拍摄全景照片之前期有良好的规划,事先对场地、环境有一个初步的估算,拍摄过程中会顺利不少。在拍摄过程中,为了获取高质量的全景照片,还必须要注意一下几点: 1、图像噪声Noise 电池传感器CCD的灵敏度(ISO)。 ISO越小,噪声越小;默认值为100,可以调整为200,400,800。(自动拍摄模式下当光线较暗时会自动增加ISO值,导致噪声增加) 解决办法:尽量用ISO100。相机拍摄的时候不要开太长时间,开了以后,马上拍摄。 CCD温度 CCD温度越高,噪声越大。根据经验,温度每升高6-8度,噪声增加一倍。 解决办法:拍摄的时候,先把相机放到阴凉的地方,需要拍摄了才拿出来。 曝光时间 但曝光时间长于1/4s,甚至到1-2s,出现StuckPixel。 解决办法:通过拍摄一幅相同DarkFrame(采用相同的曝光时间拍摄一幅黑色的图像)。有的相机支持DC4800、CanonEOS-D30digitalSLR。在这里需要指出我们原来认识上的一个误区:光圈越小越好(F值越大越好)。较小的光圈可以获得较大的景深,所以我们建议采用较小的光圈,但这也不是说F值越大越好,因为如果环境光线较弱,而鱼眼镜头拍摄又不能使用闪光灯,使用较小的光圈可能会是的曝光时间变得比较长。如果曝光时间大于1/4s,可能会给图像带来明显的噪声(Noise),这时就需要在光圈和快门之间做一个权衡取舍。 其他降噪方法:采用Photoshop等图像处理软件。 2、光圈 光圈影响景深。光圈越小(F值越大),景深越大(清晰范围越大);光圈越大(F值越小),景深越小。鱼眼镜头拍摄图像物距是无穷远的,要求全景图像景深比较宽(也就是在相当宽的范围内聚焦效果比较好),这就是为什么全景摄影采用较大的F值的原因。 3、景深
全景拍摄原理
如何创建全景影像 解答 “缝合”这一术语表示利用软件,以电子方式将多个影像连接在一起制成较大影像。当以数字方式缝合全景影像时,拍摄的影像边缘必须完全重合,歪斜的相机会使最终影像的接缝不整齐。如果所有照片均以相同的曝光和白平衡设定拍摄,则最终影像效果会非常好,否则会出现亮度和色彩接缝。虽然这可使用软件纠正,但是在拍摄时就纠正,效果将会更好。 创建远距离物体的全景影像相对容易,以下是使用ArcSoft的“PanoramaMaker”软件将四个独立影像缝合在一起的影像例图。只要在用相机拍照时将单个影像很好地对齐(务必使相机与地面保持水平),软件即可创建完美的全景影像。 但是,拍摄前景和背景中物体的全景影像非常困难。为了消除视差错误,必须找出其光学中心(或“节点”)。以下例图显示拍摄前景和背景物体时出现的视差错误(数码相机固定在三脚架上,并从相同位置拍摄A和B影像。)。 A影像 - 相机朝向背景中的教堂,前景中有一棵树。 B影像- 相机在三脚架上转向左侧,因此只能看到教堂的左侧,但是前景中的树“似乎”相对于教堂的位置发生移动。 C影像 - 使用全景处理软件以电子方式缝合影像,但由于前景中的树“似乎”相对于教堂的位置发生移动,所此它出现了两次。 此错位现象叫作“视差错误”,当将影像缝合在一起时,缝合影像的全景软件将无法纠正此错误。 A B C 要纠正此错误,必须沿镜头的光学中心(或节点)旋转相机。镜头的节点是光路径在聚焦于相机感光器或胶片平面之前,在镜头中汇聚的一点。以三脚架插座为中心旋转相机几乎肯定会导致视差错误,因此需要先找到节点,然后固定相机,再以该节点为中心旋转相机。
鱼眼镜头MTF测试
DxO Analyzer 光学模块鱼眼镜头MTF测试https://www.360docs.net/doc/2c1369398.html,2015年7月27日我爱研发网参与:2人我来说两句 DxO Analyzer 鱼眼镜头MTF-介绍 -对于鱼眼镜头,使用平面测试卡测量MTF很难做到的 -DxO给出的解决方案是: 使用平面测试卡(棋盘格) 将相机安装在一个球形全景云台上,在不同视角下采用多种曝光进行拍摄 -优势 所有镜头只需一张平面测试卡 适用的镜头视场角>180° 大畸变鱼眼镜头拍摄的平面测试卡 DxO鱼眼镜头MTF-拍摄照片示例 -水平视场角为140°的镜头。在每个测试点拍摄一张照片。
Nikkor 10.5mm f/2.8G ED on a Nikon D800 (FoVh=130°, 15Mpix) - Shooting distance: 500mm DxO鱼眼镜头MTF-测试流程(1)
将相机固定在全景云台上,在不同视角下拍摄一系列图像 DxO鱼眼镜头MTF-测试流程(2) 当测试相机的自动曝光打开的时候,通常使用白色挡板来修正曝光。 没有白色挡板,图像容易过曝
使用白色挡板,图像曝光正常 DxO鱼眼镜头MTF-测试流程(3) Ex. w/ Canon EF 15mm f/2.8 on a Canon 5D Mark III (FoVh=140°, 21Mpix) shooting distance: 525mm
DxO鱼眼镜头MTF-测量结果(汇总)-以单张照片的形式显示MTF测量结果锐度,极限分辨率 中心的结果和边角的平均值结果
中心,边缘和边角的MTF曲线 Canon EF 15mm f/2.8 on a Canon 5DmkIII (FoVh=140°, 21Mpix) - Shooting distance: 525mm DxO鱼眼镜头MTF-测量结果(数据界面) -显示每个测量指标的全部数据
360全景图拍摄教程
360全景图拍摄教程 在网络上要展示交互式的空间或物体效果时,大致有两种方法,一种是直接3d 制作原始模型,然后贴图渲染在发布到网络上。另一种就是要涉及到全景摄影。因为全景图片是直接从实物拍摄而成,只要前期的拍摄和后期的全景软件处理做得好的话,其真实感要好于用三维制作的效果。制作高质量的360全景全景图片至少需要了解以下几个方面: 一、了解全景摄影和传统摄影的区别: 1.由于360度全景是要捕捉场景360°范围内的所有信息,所以一般用鱼眼镜头来拍摄(一般为视角等于或大于180°,焦距6mm~16mm之间的超广角镜头),鱼眼镜头镜片结构复杂,边缘和中央进光有差异,全景镜头无法使用遮光罩,无法使用偏光镜,除了sigma8mm能使用滤光片以外,大部分的全景镜头都无法使用等等。 2.全景摄影由于更多地需要后期的图像处理,更注重于数码摄影,而更多的摄影师目前还是使用传统的胶片相机。很显然数码摄影和胶片摄影的差别是相当大的,对同样的场景条件,用同样的参数,出来的结果可能相差非常远。数码摄影牵涉了太多电子的东西,发热了,振动了,冷了,光线太强了都难出好效果。 3.全景一般更侧重于表现场景的全局信息,所以全景拍摄更注重选点,传统摄影更注重于构图。 4.全景摄影更注重从全局光线去考虑,所以大部分的全景都是拍摄在晴朗的,光线充足的时候一般秋高气爽的时候,对场景整体光照比较讲究,世界的大部分全景摄影师都在大白天甚至烈日当中四处游曳,而传统摄影更喜欢早出晚归,在绝大部分光线条件下都可以拍出好的作品来。 5.全景摄影在景深方面没有太多的选择余地;在有太多运动物体的场景里由于受拼合等限制无法有良好的发挥。 二、选择好的摄影设备:全景拍摄,您需要有一个好的数码照相机,一个鱼眼镜头,一个专业的全景头和一个性能优秀的脚架,推荐以下几个配套方案: Nikon Coolpix4500、990、995、5000、5700相机+ FC-E8、FC-E9鱼眼镜头 + kaidan kiwi 系列云台、全视角4500全景头+脚架,Nikon D100 D1 D2H,Canon 1DS,Kordak14n 数码相机+sigma8mm鱼眼镜头+manfrotto全景头+脚架。以上设备已经过全景色友们的实践证明确实可行。如果采用传统相机+鱼眼镜头的,则要考虑用专业的底片扫描仪了。
使用佳能5D相机及15mm鱼眼镜头制作球形全景
使用佳能5D相机及15mm鱼眼镜头制作球形全景 1.介绍 本文详细描述了我使用佳能5D及15mm鱼眼镜头制作球形全景的过程,在这里我非常感谢Karl Harrison教授的网站给了我莫大帮助(got me off the ground)。 本文中所用到的原始照片和与之相配合的pto文件以及本文的原始文档(EN)可以在这儿找到。(译者:也可以在本站下载到上述原始照片) 2.设备及软件 Canon EOS 5D 一种全画幅(35mm)的数码相机,分辨率12.8 Mpixel。 Canon EF 15mm f/2.8 Fisheye 全画幅鱼眼镜头. Canon Remote Switch TC-80N3 可以避免微小抖动,更便宜的RS-80N3模块也可以使用。 Manfrotto 303SPH 虚拟现实头 一种完全解决视差的可调校的三角架云台,可以通过点击来进行水平定位,改变竖向仰角。 Manfrotto 438 Ball Camera Leveller 一种通过调整三脚架来为全景头找平的水准仪,内置水平指示器。 Manfrotto 190MF3 镁纤维三脚架 支撑以上所有设备,强度高而重量轻。 Lowepro Compu Trekker AW 34030 背包 可以将上述设备及一台笔记本电脑全装在里面。 Hugin 拼接全景的软件。 Gimp 后处理图形软件 3.设置 3.1.相机 很重要的一件事是,为了使每张照片都能得到相同的效果,应将自动功能取消。使用AEB功能以便得到过爆和欠爆的照片,请参考第5节;为了简化并减少空间占用,我使用了jpeg格式;这种配置使我得到了更宽的范围,当然,如果你愿意也可以使用RAW。 1. 将相机模式盘设置为M(手动)。 2. 在菜单中设置AEB(自动包围曝光),最大值为2。 3. 将ISO设为200。 4. 设置白平衡为“白天”。 5. 光圈16 - 这样可以得到更好的景深。 6. 在菜单中设置高质量jpeg格式。 7. 在菜单中选择“配置存盘” - 这样你就可以通过在模式拨盘上直接选择C而使用本设置
鱼眼图像畸变校正算法
据《硅谷》杂志2012年第21期刊文称,根据鱼眼镜头成像的特点,选择合适的图像畸变校正算法,标定鱼眼图像的中心和半径,用标定得到的参数进行校正,推出校正模型,方法简单,易于实现,并对鱼眼图的畸变矫正问题提出意见与看法。 关键词:鱼眼图像;畸变矫正;图像预处理;图像增强 鱼眼图像的畸变矫正是以某种独特的变换方式将一副鱼眼图像转换为理想图像的操作,这种操作在全方位视觉导航中具有重要的作用,是系统自动识别、跟踪和定位目标所必须的基础操作。 1畸变图像的校正原理 根据畸变图像特点标定坐标图,求取标定点像素的理想值和实际值,同时生成坐标映射表,再把坐标映射表用于畸变图像的校正程序后,即可得到无畸变图像,具体处理过程如下:1)标定坐标 镜头中心的畸变可以忽略为零,以镜头为中心,离镜头越远的地方畸变越大。以镜头为中心标定坐标图,对图像进行坐标的标定,按正方形均匀排列圆点,如图1所示。 2)图像预处理 先通过图像的、突出边缘细节;然后再用二值化处理增强调节对比度的图像,但部分样板点和背景的对比的差值较大,所以是设定一个阈值对整幅图像进行二值化,最后再对二值化后的图像再次进行中值滤波的方法处理,再次使用中值滤波方法可以有效的去除畸变图像中的部分椒盐噪声的影响。二值化的主要作用是可以提高畸变校正图像的质量,预处理图像可以为点阵样板圆点中心的确定提供重要的作用。 3)圆点中心的确定 由于图像畸变的影响,经过图像预处理后的畸变校正图像仍然是不规则的实心圆,然而样板中的确定的圆点却是规则排列的,所以可以在畸变校正的样板图像上把各个圆点的重心近似的替换为圆点中心,找出一个圆点的重心作为理想畸变校正样板图像上与之对应的点,并找出该点处于二维平面坐标之中与之距离之和最大的圆点,从各个圆点的坐标之中找出与之距离之和最大的圆点坐标,该点坐标即为畸变图像中与之相对应的点的坐标。再找出理想的点阵样板图像和该畸变校正图像中各圆点中心的位置,计算出点与点之间的垂直距离,即可得到点阵样板图像中各点之间的偏移量,从而可以描绘和构建畸变校正图像上的各个点之间偏移量的曲面。最后经过图像预处理过程的样板圆点中心的确定,可计算出其它圆点中心的坐标位置。 2有关鱼眼图片的粗略校正 1)求取鱼眼图像行和列的比值 将投射生成标准圆变换为鱼眼图片并求取图片中心点的方法与普通相机照相原理不同,对于提取出来的鱼眼图片的轮廓,我们先假定一个阈值,比如设一个灰度值30,用软件勾勒描绘出校正鱼眼图片大概的轮廓,然后先求出该轮廓的中心点坐标,根据轮廓的图形和鱼眼图像的中心点的坐标,可计算出畸变图像的圆半径,从而求取鱼眼图像的中心点坐标和鱼眼图像的粗略轮廓的图像的半径相对比,以便于将鱼眼图像的大概轮廓重新调整处理,变的更为精确和直观。假定畸变校正的鱼眼图片的半径中的行坐标曲线和列坐标曲线不相等,则我们需要将畸变校正的鱼眼图像中的园的半径的曲线与下面的公式相乘,然后就可以变换为普通的标准圆的图像。下面公式中(u,v)是畸变校正的鱼眼图片的中心点,β为畸变校正的鱼眼图像行和列的比值。 2)鱼眼图片的粗略扭曲校正 在得到中心点的坐标和校正形状之后,把扭曲的鱼眼图像通过投射降低图像的扭曲程度变为正常的四方形的图像。
2020汽车全景照片拍摄制作技术服务协议(标准版)
汽车全景照片拍摄制作技术服务协议 甲方:乙方:甲乙双方经过友好协商,本着平等互利的原则,就有关乙方为甲方拍摄制作______汽车360度全景外观和全景内饰照片技术服务事宜达成如下协议:一、合作内容:甲方负责安排拍摄时间;乙方负责全部拍摄工作和制作工作,并提供网上浏览的java程序和相关文档,甲方拥有所有程序和文档的版权。乙方保留对拍摄作品在乙方网站进行“成功案例”展示权。此次共拍摄____种型号的__________轿车360度全景外观和全景内饰。二、一般工作程序和要求: 1.甲方拍摄的汽车应在拍摄前做好车身清洁工作(包括车体清洗,需要拍摄内饰的汽车应将座椅上的防护塑料薄膜拆除)。双方按照商定时间准时到达指定拍摄点。 2.在完成拍摄制作后,图片在乙方网站(https://www.360docs.net/doc/2c1369398.html,)隐秘路径下提供甲方验收。 3.验收完成后,甲方需将合同规定全额款项汇入乙方指定帐户。乙方在受到汇款后,即将拍摄的图片与相关程序以电子邮件方式交付甲方。三、收费及验收标准: 1.汽车外观全景图:由环绕汽车一周(360度)全方位拍摄20蜘36帧等的单帧数码照片组成,网上显示尺寸为320*160或400*200。 2.汽车内部360度全景内饰为“完整球型”全景照片,格式为jpa,像素不低于1600*600,横向视角360度,纵向视角140度至180度,网上显示尺寸为320*240。 3.本协议为_____部汽车的拍摄外观图,每部汽车收费______元,360度全景内饰图价格为______元整。拍摄、制作费用合计为人民币_______元整。协议交通膳宿费(京津以外地区拍摄)人民币_______元整。协议总金额共计人民币_________元整。 4.自拍摄完毕之后 _____天内(不含拍摄当日)完成制作,通知甲方在乙方网站完成验收。验收标准为双方商定的乙方网站相应演示范例水准。 5.验收完成,乙方在收到甲方支付的全额款项后,将所完成的汽车全景图及相关程序(含jpa加密格式图象文件、网页html源代码、java浏览程序)以电子邮件方式交付甲方。四、付款方式: 1.协议签定后三个工作日内,甲方付协议总金额的30%,即人民币______________整,汇入乙方指定的帐户。 2.验收完成后,甲方需在一周内将剩余款项人民币___________元整,汇入乙方指定的帐户上。乙方在收到款项之后,即将开具总金额全额的发票交付甲方。五、其它事宜:本协议书正本一式两份,甲、乙双方各执一份。如合作过程中出现纠纷,甲乙双方双方协商解决。如不能解决,交北京市仲裁机关解决。本协议的最后一个签定日期为生效日期,协议有效期为_____个月。甲方:乙方:
全景鱼眼平面图像摄像头Fisheye Image Correction Camera
iFIC (Fisheye-Image-Correction) Camera ) (180-degree Angle-of-View Automotive Camera View Camera)
Sensor Active Array
Demo Pictures Pictures
Before Image Correction After Image Correction
Size Sensor Pixel Size F No. FOV Horizontal FOV Vertical FOV Diagonal Image Distortion Degrees of Protection (IP Code) Lens Construction
752 x 480 pixel 6.00um x 6.00um 2.0±5% 178° Approximately 156° Approximately 190° Approximately 1.00% IP67 4G1P Yes Yes/ with Self Self-Clean +105℃ ~ -40℃ +125℃ ~ -50℃ 90% RH 1.0Vpp 75ohm 12V/ 9~24V
Before Image Correction
After Image Correction
UV Resistance Anti-Fog Coating Operating Temperature Storage Temperature Operation Humidity Video Output Power Supply
iFIC Camera Product Features:
n n n n n 190-degree Super Wide Angle Fisheye Lens Fisheye Lens Distortion Compensation with Image Correction Technology Wide Temperature Range Smallest Automotive Package Low Power Consumption
三维全景照片拍摄与制作教程
三维全景拍摄与制作教程 如果你想用一个特殊的照相机一次拍一张全景照片,那么这里的文章对你都没什么用。因为用那种特殊的相机,你能很方便地得到它。如果你没有一个特制的照相机,而又需要拍一系列照片,再把它串起来,如果你读了本文以后会觉得这真的很简单…… 全景拍摄步骤指南 如果你是第一次接触全景摄影,可能会以为全景技术是一个很复杂的东西,其实不是的;相反很简单。你是否专业摄影师或业余爱好者,还是只想玩玩,立刻打印这页,带上你的照相机跑出去,遵照这个指南,你很快就可以拥有你第一张全景照片拉! 如何选择全景拍摄的装备 你可以买任意一种相机来生来成全景照片。你并不需要别的任何设备,但你可能很快发现如果你手持普通相机的话真的不能拍出高质量的全景照片来。下面列出的规则有助于你更容易拍出更好的照片。 全景拍摄技巧 在你开始拍照之前,确信你的位置正确,那你就可以把东西都安装好。如果你有个全景头, 注意正确使用,下面我们来学习全景拍摄时注意的问题,包括摄影点的选择和三角架的使用技巧。 全景拍摄三难题 在进行的实际拍摄后,我们需要经常面临的问题就是需要计算拍摄的照片张数?自动调焦还是手动调焦?光线条件有多困难。处理好以上三个问题才能够获得最后的成功。 拼接的窍门 大多数拼接软件都非常直观,不过要生成更好的全景照片还是有一些重要的小窍门的。 全景图象编辑 如果你想给你做好的全景照片增加一些文字说明或其他文本、图象或logos ,你只要用个图象编辑器,但是用SkyPaint这样的软件更为容易。 全景照片润色 完美的拼接是难的,所以,一个小小的图象编辑器可以去掉不好的地方,得到一张真正的好照片。 生成球型全景图
360全景生成方法
如何制作一个360度全景 360全景不是凭空生成的,要制作一个360全景,我们需要有原始的图像素材,原始图像素材的来源可以是: A、在现实的场景中,使用相机的全景拍摄功能得到的鱼眼图像 B、通过建模渲染得到的虚拟图像 下文中的表格对比了在不同的设备、拍摄机位、拼合模式、拍摄难度下所能获得到的鱼眼图像 原始图像素材类型采用的 相机设 备 采用的机 位 采用的拼合模式 特 点 描 述 鼓形,两边被切的鱼眼图像:上下弧线处180度Nikon 或 Canon 单反相 机 Sigma 8mm 镜头 竖直拍摄 拍摄水平一圈四张鱼眼图 像,用(Drum)模式拼合: 拍 摄 简 单 图 像 清 晰 推
荐 全帧,四边被切的鱼眼图像: 对角线180度Nikon 单反相机Nikon 10.5m m镜头竖直拍摄 拍摄水平一圈六张或者加 天地两张鱼眼图像,用 (Fullframe6+X)模式拼 合: 拍 摄 较 为 复 杂 图 像 清 晰 全帧,四边被切的鱼眼图像: 对角线180度Nikon 单反相机Nikon 10.5m m镜头横向拍摄 拍摄水平一圈四张或者加 天地两张鱼眼图像,用 (Fullframe4+X)模式拼 合: 拍 摄 较 为 复 杂 图 像 清 晰 整圆,所有角度都能够达到180 Nikon横向拍摄拍摄水平两张或者三张鱼拍
度及以上或 Canon 全画幅 单反相 机适马 8MM 鱼眼镜 头或者竖向 拍摄 眼图像,用(Circular)模 式拼合: 摄 简 单 图 像 清 晰 虚拟图像,由三维建模的场景渲染获得: 90度*90度3Dma x Maya AutoC AD 或其他 软件建 模 无 渲染正方体形式六个面的 图像,用(Cube Face)模 式拼合: 效 果 可 自 行 设 定 要拍摄全景素材我们需要用到一些专业设备,如下:
全景照片的拍摄和拼接技巧
全景照片的拍摄和拼接技巧 全景照片的制作分前期拍摄和后期拼接摄两个步骤。前期拍摄是制作全景照片的前提,后期拼接取决与软件使用技巧。笔者认为前期拍摄更为重要。 下面,先说明一下前期拍摄需要注意的几点: 1、最好有脚架。由于是拍摄成组的照片,脚架有助于保持相机水平,有助于固定相机位置和防止抖动,这些都直接影响着后期拼接的质量。当然没有脚架也可以,但相机一定要端稳、端平,否则照虚、照歪,后期就不好拼接了。 2、拍照片的时候尽量用手动曝光档(M档)。这样可以保证整组照片的曝光参数(快门、光圈、ISO、白平衡)都相同,否则拼出来的照片容易因为照片的曝光情况不同而看到明显的拼缝。曝光参数的设置应尽量不要用最大光圈,最大光圈拍天空或浅色时容易四角发暗。尽量不要使用自动白平衡,使用自动白平衡可能会造成照片的色调不一致。 3、最好对全景的中心位置使用矩阵测光或平均测光方式进行测光,然后记住快门和光圈的数值并在M档里设定。如果你的机器没有M档,那么我们也尽量使用曝光锁定机制来锁定曝光值,使得拍摄出的一组照片曝光情况基本一致。 4、不要用广角端进行拍摄。这是因为广角端通常都有比较严重的桶形变形,这样的照片在拼接时会遇到比较大的麻烦。另外,若选用过大的焦距,会导致照片的数量增加(拍摄的视角小了的缘故),将来拼缝过多。因此最好使用变焦镜头的中焦段或定焦的中焦段镜头拍摄,一般使用50毫米左右的焦距比较合适。而且,焦点一定要固定,这里最好用手动对焦。 5、照片之间需要有重叠区域。全景软件就是靠这些重叠的地方来自动拼接照片的。一般来说,重叠区域应占20%~40%。别太少,也别太多。重叠过少,软件就不能进行自动拼接;重叠过多,软件可能无法混合这些图像。而且,在重叠区域最好不要有运动物体和很复杂的物体,这些都不利于后期拼接。 6、对拍摄的照片,上下都要留出比平常拍摄时更多的空间,因为最后完成的全景照片肯定是要剪裁的,留出这些空间就是为了避免剪到主体。根据被摄物情况,可以采取横幅的横、竖向移动拍摄,也可以竖幅的横、竖向移动拍摄。为了让画面的上下方有更大的空间以利于裁减,可采用竖幅构图。 7、遇到光比大的场景时适当用曝光补偿加、减档,以保证整组照片的一致性。 以上是前期拍摄注意事项,再说后期的拼接要注意以下几点: 1、首先需要注意,拼接前不要对照片的色彩、亮度、对比度进行任何修改。 2、可以使用Photoshop的自动拼接全景图的功能。点击文件——自动——Photomerge,点击浏览将要拼接的照片调入,这时Photoshop会自动进行拼接,可以微调每一幅图,进行仔细的拼接。如果Photoshop不能自动拼接,可以一张张将图拖进拼接区,手动拼接。 3、也可以不用自动拼接功能,直接在Photoshop中新建一个合适大小的文件,将要拼接的图拖进这个文件,手动拼接,拼接时可以先将一张图的透明度降到50%,这样便于拼接,拼接后再将透明度调回100%。 4、拼接完成后可以用Photoshop的“修复画笔功能”对接缝的一些细节进行修补。 5、网上也有很多自动拼接的软件,如Canon相机自带的Photostitch、Casio相机自带的Panorama editor,专门软件Panorama Factory等等。大家可以自己下来用用,在这就不介绍了。 breezie编辑整理
单反相机如何拍摄全景照片
单反相机如何拍摄全景照片 单反相机如何拍摄全景照片阿龙:老狼,讲讲全景照片拼接技巧吧,现在很多消费级的数码相机都提供了全景照片拍摄功能,单反相机却没有这样的功能,要实现全景拍摄要需要手工拍摄和后期合成,对于单反相机拍摄全景照片有什么技巧,需要注意什么呢?老狼:是的,现在消费DC的功能越来越强大,全景功能很强,特别是索尼的消费相机。对于单反来说,全景评价虽然是在后期进行,不过前期的拍摄也非常重要,下面就教你几个简单的技巧。全景照片的测光与光圈的运用单反相机的测光系统非常敏感,对于细微的拍摄环境光线差异,单反相机都会采用不同的曝光参数。因此当拍摄多张合成照片的时候,有可能造成每张照片的曝光参数都不同,如果将这些有着曝光参数差异的照片最后合成,很容易就暴露了拼接的边界,造成全景照片残片。在拍摄的时候先将相机调整为光圈优先模式,然后将测光模式调整为评价测光,最后将镜头对准全景照片最重要的部分进行测光,然后记下快门、ISO、白平衡等参数。当开始拍摄全景照片 的时候,切换到手动模式,依次调整记录下的参数,并锁定。另外为了获得足够宽的景深,最恰当的光圈值应该在F8至 F11之间。这样的光圈设置既可以获得足够的景深,又保证足够的镜头透光量。拍摄时要给两张照片之间留够衔接的空
间,拼接的地方尽量选择没有人物出现的部分进行拼接全景照片的构图与焦距全景照片需要将多张拍摄照片进行叠加 拼合,因此在构图拍摄的时候,左右相邻的两张照片需要留出一定的重叠部分,这样后期才可以依据重叠位置进行照片的拼合。如何控制照片重叠量:全景照片左右拼接部分的重叠量不能太多也不能太少,太少会造成拼接依据信息不足,无论手工还是软件后期都无法拼合,而太多则很容易看出拼接破绽。一般来说,最佳的照片重叠量因占照片的10%或者15%。至于如何选择拍摄焦段:人眼的焦距通常在50毫米左右,因此推荐使用50毫米左右的镜头焦距比较合适。使用50毫米的镜头拍摄的照片拼接全景图全景照片后期处理软件的选择分段拍摄完照片,最后我们要做的就是把这些照片进行拼接。Photoshop虽然可以完成该项任务,但是软件过于庞大,且操作过于复杂。其实对于这些任务,还是有很多便于操作的智能化软件可以选择的。全景照片处理软件推荐:ArcSoft Panorama Maker、PhotoStitch、友立Cool360 全景照片处理软件的智能拼接技术很方便
360全景拍摄合同
摄影服务合同 甲方(委托方): 乙方(受托方): 签订地点:签订时间:2017年月日
甲乙双方经友好协商决定,由甲方组织拍摄的摄影服务,为了保证拍摄制作工作顺利完成,特签订本合同,具体条款如下: 一、拍摄制作周期自 2017 年月日开始至年月日完成验收。 二、拍摄以全景照片为主,具体拍摄标准如下: 1、航拍全景照片 大疆无人机 4 (1)除下雨天、严重大雾天、夜晚外,天气好的情况都可以进行拍摄,拍摄高度控制在50米—150米(根据场景规模的大小调整,要能在空中看清场景规模大小为佳)。 (2)拼接无错位、曝光合适、色调正常、对焦清晰,天空需进行修补。 2、地面全景照片 设备需使用全幅单反相机4240万像素。 (1)室外除下雨天、严重大雾天、夜晚外,天气好的情况都可以进行拍摄。 (2)地面的2:1全景照片的长边不低于15000像素。 (3)拼接无错位,曝光合适,色调正常,对焦清晰。 三、此次合同费用为: (名称):共计。(航拍元/点位,地面元/点位。共计点位,总计元。) 签订合同3日内首付50%,即:元(),验收后3日内付50%尾款,即:元()。 拍摄期间的交通、食宿凭发票车票报销,拍摄计划自行安排。 甲方前期会协调好拍摄单位,并根据拍摄进度随时沟通联系。以保证乙方顺利拍摄。 四、验收标准 乙方整理好所有照片数据好,以百度云账号的方式进行交付。 1、航拍、地面全景照片 需提供拼接好的2:1的全景照片。JPG格式文件及全景照片拼接方案。 2、存放取名 举例: 1级目录:20170828-图行网-贵州镇远古镇 2级目录:入口、大厅、绿化等
五、此次合同拍摄的所有照片数据所有权归甲方。 六、违约责任 1.甲方未能按双方同意的付款计划按期付款的,造成停工拖延周期,需追加的资金由甲方负责。 2.甲方由于重大方案调整或市场因素,需对拍摄内容有重大修改,需要追加的资金由甲方负责。 七、本合同一式两份,双方各执两分。本合同有未尽事宜,双方协商解决,或交与仲裁机构处理。 甲方(签章): 乙方(签章): _ 地址:地址: _____________________________ 电话:电话:_________________
全景拍摄及制作的全过程
全景拍摄及制作的全过程 baidu XR技术团队 全景拍摄是指以某个点为中心进行水平360度和垂直180度拍摄,将所拍摄的多张图拼接成一张长与宽比为2:1图的照片拍摄及图片拼接方法。 制作全景图现在有两种方式,一是多角度拍摄后用缝合拼接软件(造景师、720云、全景网)或者PS做成全景图,优势是像素高成像质量好,劣势是拼接费事,缝隙处理没有保障。第二种就是现成的全景设备直接拍摄,由硬件软件的支持直接可以输出全景图,国内外这样的设备已经很多了。圈内用的最多的是gopro(后期缝合),理光的theta(机内缝合),得图的F4(机外缝合),Insta360bate (机外缝合),完美幻境的eyesir(4K机内缝合),市面上大概就这些设备了,各有优劣。这种设备的优势就是足够便捷效率,但是效果可能就差强人意了。 一、 全景拍摄 1.1 硬件要求 全景摄影采用的设备一般有单反相机、鱼眼镜头、云台和三角架。根据制作者对全景质量和用途的不同要求。单反相机较普通数码相机的优势就不用说了,可以制作高清晰度的全景,接上鱼眼镜头后可以使拍摄数量大大减少。为了提高全景图片拼合的准确性我们必须要借助一些工具,以达到多张图片重叠部分尽量不发生偏差,三脚架和云台就是这个作用。 图1 云台
1.2 拍摄 如果球体上每个方框代表我们的一次拍摄,在这样的案例中就需要拍摄超级多的张数,这样无疑对拍摄的要求,后期的拼合,电脑的硬件要求都会提高。但是如果使用广角镜头或者鱼眼镜头,相机的视角就会大很多,对应的到球体的方块面积就会大很多,随之铺满整个球面的个数就会减少。 图2 拍摄瓦片 要拍摄完美的全景照片就要使用镜头节点当旋转中心,这样在拍摄的多张照片中的物体都不会产生位移,可以完美无缺的连接成一张超广角照片。在影视拍摄时可以运用镜头节点技术进行背景的完美叠加。一般情况下,最少6张图即可,前后左右下上,要求每张图片都重合部分,当然图片越多效果越好。 一般情况下,地面往往有三脚架,需要采用一些技巧去除掉三脚架的痕迹,以保证全景图片的完美。
全景照片拍摄服务协议样本
工程摄影拍摄合同 甲方:(以下简称甲方)乙方:武汉晨龙全景摄影有限公司(以下简称乙方)甲乙双方经过友好协商,本着平等互利的原则,达成如下协议: 1.拍摄内容: 1.1拍摄时间:年月日 1.2拍摄地点: 1.3拍摄项目: 1.4甲方负责安排拍摄时间及地点(需提前一周通知乙方),乙方负责 全部拍摄和制作工作。 2.一般工作程序和要求 2.1甲方按双方约定的时间和地点进行拍摄。 2.2甲方工作人员需配合乙方工作人员整理现场,指挥工作由乙方工 作人员负责。 2.3在完成拍摄制作后,作品由乙方负责派人于日内交付甲 方。 3、收费及验收标准
3.1摄影作品宽约寸,长约寸,需张。 3.2每张照片收费元。制作费用为人民币元整。协议交通 膳宿费(武汉市以外地区拍摄)币人民币元整。协议总金额共计人民币元整。 3.3 作品验收标准以双方事先商定的相应演示范例为参考依据,根据 拍摄时间、光线、背景的不同作相应的调整。 4、付款方式及时间 4.1交货验收完成后,甲方需将元整于日内交付 乙方或汇入乙方指定帐户。 5. 其它事宜: 。 5.1 本协议书正本一式两份,甲、乙双方各执一份。 5.2 在签定本协议后,如果双方单方面取消拍摄,将按照交货总费用的 70%作为违约金支付给对方。 5.3 因不可抗拒因素(天气等)导致拍摄无法正常进行,此协议自动作 废。
5.4 如合作过程中出现纠纷,甲乙双方协商解决。 甲方:乙方: (盖章):(盖章): 签字:签字: 开户银行:开户银行:交行东西湖支行 帐号:帐号:421868088018010041307 签定日期:年月日签定日期:年月日