机械原理课程设计牛头刨床导杆机构运动分析
牛头刨床导杆机构的运动分析
目录
1设计任务及要求……………………………
2 数学模型的建立……………………………
3 程序框图……………………………………
4 程序清单及运行结果………………………
5 设计总结……………………………………
6 参考文献……………………………………
机械原理课程设计任务书(一)
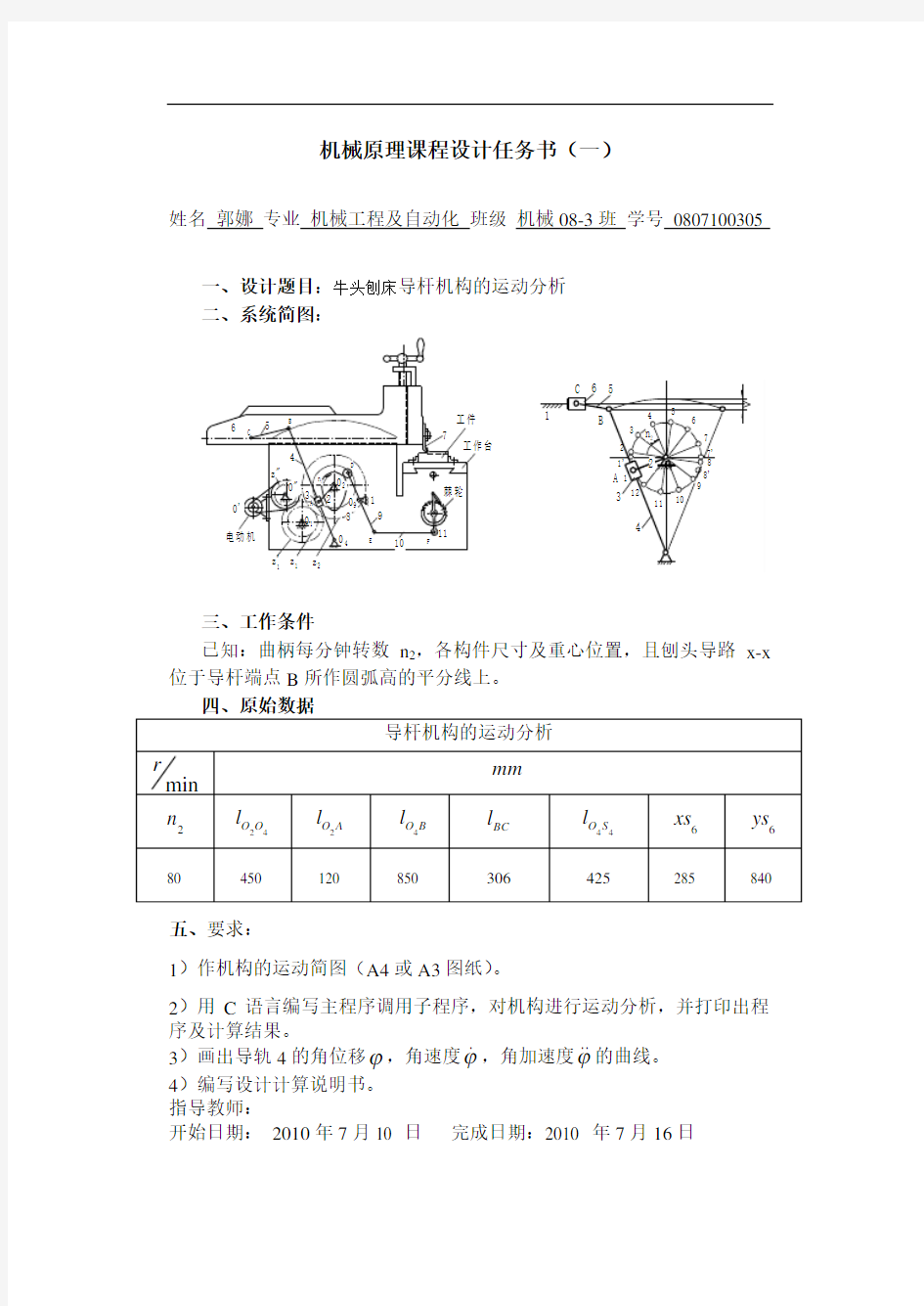
姓名郭娜专业机械工程及自动化班级机械08-3班学号0807100305
五、要求:
1)作机构的运动简图(A4或A3图纸)。
2)用C语言编写主程序调用子程序,对机构进行运动分析,并打印出程序及计算结果。
3)画出导轨4的角位移?,角速度? ,角加速度? 的曲线。
4)编写设计计算说明书。
指导教师:
开始日期:2010年7月10 日完成日期:2010 年7月16日
1. 设计任务及要求
要求
(1)作机构的运动简图。
(2)用C语言编写主程序调用子程序,对机构进行运动分析,动态显示,并打印程序及运算结果。
(3)画出导轨的角位移Ψ,角速度Ψ’,角加速度Ψ”。
(4)编写设计计算说明书。
二、 数学模型
如图四个向量组成封闭四边形,于是有
0321=+-Z Z Z
按复数式可以写成
a (cos α+isin α)-b(cos β+isin β)+d(cos θ3+isin θ3)=0
(1)
由于θ3=90o,上式可化简为
a (cos α+isin α)-b(cos β+isin β)+id=0
(2)
根据(2)式中实部、虚部分别相等得
acos α-bcos β=0
(3)
asin α-bsin β+d=0
(4)
(3)(4)联立解得
β=arctan acosa
asina
d +
(5)
b= 2adsina d a 22++ (6)
将(2)对时间求一阶导数得
ω2=β’=
b
a
ω1cos(α-β) (7)
υc =b ’=-a ω1sin(α-β)
(8)
将(2)对时间求二阶导数得
ε3=β”=
b
1[a ε1cos(α-β)- a ω2
1sin(α-β)-2υc ω2] (9)
a c =
b ”=-a ε1sin(α-β)-a ω21cos(α-β)+b ω2
2
(10)
a c 即滑块沿杆方向的加速度,通常曲柄可近似看作均角速转动,则ε3=0。
三、 程序框图
程序设计时,一般αθ=1是未知量而1ω已知且为常数,它们的关系为,,)(11t t ωθ=取相等时间间隔t ?,则
N t N ???=11ωθ其中N 为整数
四、程序清单及运算结果
符号说明
Q1:曲柄1的角位移Q3:导杆3的摆动的角位移
S3:C点沿杆3的位移Q31:导杆3摆动的角速度w3 S31:C点相对于导杆3的速度Q311:导杆3摆动的角加速度a3 S311:C点相对于导杆3的加速度L1:曲柄1的长度
L6:曲柄1与导杆3的回转中心的距离
(1)程序清单
①导杆3的计算程序
#include"math.h"
#include"conio.h"
#include
#define PI 3.1415926
#define M 0.017453
main()
{ int Q1,i=0,j=0,Q_1[71];
float S_e[71],S_e1[71],Q_411[71],S_e11[71];
float Q3,Q31,Q311,w3,a3,Q4,Q41;
float Q411,s3,s31,s311,Se,w4,Ve,Se1,a4,Se11;
FILE *f1;
if((f1=fopen("fdata.txt","w"))==NULL)
{printf("fdata.txt file cannot open!\n");
exit(0);
}
clrscr();
printf("jiao du wei yi su du jiaojiasudu jiasudu\n");
for(Q1=0;Q1<360;Q1+=5)
{ i++;
if(i%12==0)
{getch();
printf("jiaodu weiyi sudu jiaojiasudu jiasudu\n");
}
if(Q1>=0&&Q1<90||Q1>270&&Q1<=360)
{Q3=atan((350+90*sin(Q1*M))/(90*cos(Q1*M)));
Q3/=M;
}
else if(Q1==90||Q1==270)
{Q3=90;}
else if(Q1>90&&Q1<270)
{Q3=PI+atan((350+90*sin(Q1*M))/(90*cos(Q1*M)));
Q3/=M;
}
if(Q3!=90&&Q3!=270)
s3=90*cos(Q1*M)/cos(Q3*M);
else if(Q3==90)
s3=440;
else
s3=260;
s31=-90*6.8*sin((Q1-Q3)*M);
Q31=90*6.8*cos((Q1-Q3)*M)/s3;
w3=Q31;
Q311=(6.8*6.8*90*sin((Q3-Q1)*M))-2*w3*s31;
a3=Q311;
Q4=180-asin((530-580*sin(Q3*M))/174)/M;
Se=580*cos(Q3*M)+174*cos(Q4*M);
Q41=-w3*580*cos(Q3*M)/(174*cos(Q4*M));
w4=Q41;
Se1=-w3*580*sin((Q3-Q4)*M)/cos(Q4*M);
Q411=(Q31*Q31*580*sin(Q3*M)+Q41*Q41*174*sin(Q4*M)-Q311*580*cos(Q3*M))/(174*cos(Q4*M));
Se11=-(a3*580*sin((Q3-Q4)*M)+w3*w3*580*cos((Q3-Q4)*M-w4*w4*174))/cos(Q4*M);
Q_1[j]=Q1;
S_e[j]=Se;
S_e1[j]=Se1;
Q_411[j]=Q411;
S_e11[j]=Se11;
printf("%d %6.4f %6.4f %6.4f %6.4f\n",Q_1[j],S_e[j],S_e1[j],Q_411[j],S_e11[j]);
fprintf(f1,"%d %6.4f %6.4f %6. 4f %6.4f\n",Q_1[j],S_e[j],S_e1[j],Q_411[j],S_e11[j]);
}
j=j+1;
fclose(f1);
}
①运算结果
jiaodu wei yi su du jiaojiasudu jiasudu
0 -26.6410 -225.6121 2980.1992 -1888597.5000
5 -29.9571 -290.3119 2725.9580 -1771214.1250
10 -34.0705 -349.9124 2465.3013 -1653869.1250
15 -38.9176 -404.7200 2204.1282 -1537997.5000
20 -44.4389 -455.0467 1947.2355 -1422954.2500
25 -50.5790 -501.1967 1698.4697 -1310516.2500
30 -57.2860 -543.4551 1460.8784 -1201652.5000
35 -64.5119 -582.0817 1236.8556 -1094043.1250
40 -72.2113 -617.3046 1028.2677 -987876.7500
45 -80.3420 -649.3168 836.5630 -884575.3750
50 -88.8637 -678.2743 662.8631 -784632.6250
55 -97.7381 -704.2951 508.0354 -683126.8125
60 -106.9280 -727.4584 372.7512 -586413.1250
65 -116.3972 -747.8099 257.5296 -487261.8125
70 -126.1095 -765.3591 162.7702 -391189.9375
75 -136.0290 -780.0851 88.7760 -292519.0312
80 -146.1191 -791.9397 35.7695 -195399.5156 85 -156.3424 -800.8548 3.9034 -99716.0781 90 -166.6487 -806.7209 -6.7326 -336.6043 95 -177.0345 -809.4526 3.8907 98381.1172 100 -187.4224 -808.9144 35.7439 201360.3906 105 -197.7818 -804.9841 88.7376 303868.6875 110 -208.0682 -797.5251 162.7193 406435.0625 115 -218.2356 -786.4084 257.4662 513216.6875 120 -228.2362 -771.4974 372.6755 620025.8750 125 -238.0202 -752.6618 507.9477 731897.5625 130 -247.5368 -729.7744 662.7639 842337.0000 135 -256.7329 -702.7089 836.4528 958104.5625 140 -265.5542 -671.3401 1028.1467 1074799.1250 145 -273.9447 -635.5408 1236.7249 1193481.0000 150 -281.8466 -595.1798 1460.7390 1314749.0000 155 -289.2006 -550.1158 1698.3228 1439326.0000 160 -295.9452 -500.1955 1947.0826 *******.8750 165 -302.0172 -445.2491 2203.9717 1691299.2500 170 -307.3508 -385.0851 2465.1428 1820088.8750 175 -311.8776 -319.4932 2725.8010 1949062.5000 180 -315.5267 -248.2437 2980.0481 2077653.1250 185 -318.2238 -171.0969 3220.7498 2204597.7500 190 -319.8919 -87.8205 3439.4504 2327887.5000 195 -320.4508 1.7835 3626.3618 2445203.0000 200 -319.8185 97.8345 3770.4954 2553216.0000 205 -317.9123 200.3115 3859.9885 2647628.7500 210 -314.6508 308.9710 3882.6917 2723199.0000 215 -309.9581 423.2437 3827.1174 2773568.0000 220 -303.7680 542.1177 3683.7847 2790752.7500 225 -296.0309 664.0181 3446.9648 2767703.0000 230 -286.7217 786.708 3116.7771 2694137.2500 235 -275.8483 907.2365 2701.3325 2562871.7500 240 -263.4610 1021.9773 2218.5918 2369156.0000 245 -249.6605 1126.7856 1697.2296 2103209.7500 250 -234.6020 1217.2893 1175.8484 1775365.7500 255 -218.4965 1289.3079 699.9667 1384495.5000 260 -201.6046 1339.3322 316.6331 947077.5000
265 -184.2254 1364.9659 67.3372 484325.1562 270 -166.6487 806.7209 -6.7326 -157.5224 275 -149.2913 1340.7021 67.0276 -468633.1875 280 -132.3673 1293.2650 316.0499 -919479.5000 285 -116.1834 1225.9053 699.1774 -1320767.6250 290 -100.9728 1142.2114 1174.9329 -1666306.5000 295 -86.9208 1046.0001 1696.2716 -1955622.0000 300 -74.1637 940.9747 2217.6743 -2177823.7500 305 -62.7928 830.4984 2700.5159 -2345273.5000 310 -52.8588 717.4761 3116.0991 -2456901.5000 315 -44.3785 604.3156 3446.4526 -2518143.0000 320 -37.3407 492.9357 3683.4421 -2537459.0000 325 -31.7127 384.8089 3826.9407 -2520536.7500 330 -27.4455 281.0159 3882.6650 -2475456.0000 335 -24.4783 182.3036 3860.0955 -2407529.5000 340 -22.7427 89.1417 3770.7129 -2322242.2500 345 -22.1656 1.7749 3626.6663 -2224271.0000 350 -22.6721 -79.7296 3439.8213 -2117387.2500
②导杆3的角位移的,角速度,角加速度曲线图的设计程序
#include
#include
#include
#define pi 3.1415926
main()
{ float w1=2*pi*64/60,L1=90,L6=350;
float Q3,Q1,s3,w3,s31,s311;
int gd=DETECT,gmode,i;
initgraph(&gd,&gmode,"");
clrscr();
for(Q1=0;Q1<=2*pi;Q1+=1.0/1000*pi)
{if(Q1>=0&&Q1
Q3=atan((L6+L1*sin(Q1))/(L1*cos(Q1)));
else if(Q1==pi/2||Q1==1.5*pi)
Q3=pi/2;
else
Q3=pi+atan((L6+L1*sin(Q1))/(L1*cos(Q1)));
if(Q1!=pi/2&&Q1!=1.5*pi)
s3=L1+L6;
else s3=L6-L1;
s31=-L1*w1*sin(Q1-Q3);
w3=L1*w1*cos(Q1-Q3)/s3;
s3=sqrt(L1*L1+L6*L6+2*L1*L6*sin(Q1));
putpixel(100+Q1*180/pi,60+s3*sin(Q3)/2.5,5);
line(100,200,500,200);
line(495,205,500,200);
line(495,195,500,200);
line(100,10,100,350);
line(95,15,100,10);
line(105,15,100,10);
putpixel(100+Q1*180/pi,188+L1*w1*cos(Q1-Q3)/s3*30,6) ;/*v*/
putpixel(100+Q1*180/pi,200+(w1*w1*L1*sin(Q3-Q1)-2*w3 *s31)/s3*6,4);/*a*/
}
outtextxy(400,120,"v:su du");
outtextxy(220,230,"s: wei yi");
outtextxy(400,300,"a: jia su du");
getch();
}
②
③导杆机构运动模拟程序
#include
#include
#include
void pist(float x0,float y0,float l,float h,float theta); void pirot(float x0,float y0,float l);
void sgd();
main()
{ int gd=DETECT,gmode,n;
initgraph(&gd,&gmode,"");
for(n=1;n<=70;n++)
{setbkcolor(0);
sgd();
}
getch();
}
/* 摇块子程序*/
void pist(float x0,float y0,float l,float h,float theta) {float x,y;
x=x0-cos(theta)*1/2+h/2*sin(theta);
y=y0+1/2*sin(theta)+h/2*cos(theta);
moveto(x,y);
linerel(l*cos(theta),-l*sin(theta));
linerel(-h*sin(theta),-h*cos(theta));
linerel(-l*cos(theta),l*sin(theta));
lineto(x,y);
}
/* 支点子程序*/
void pirot(float x0,float y0,float l)
{ float pi=3.1415926;
float x,y;
int i,n;
int h=4;
setcolor(3);
circle(x0,y0,3);
setcolor(150);
x=x0-1/2;
y=y0+sin(pi/3)*l;
moveto(x0,y0);
lineto(x,y);
linerel(20,0);
lineto(x0,y0);
n=1/4;
for(i=0;i<=n;i++)
{moveto(x+i*h,y+h);
lineto(x+(i+1)*h,y);
}
}
/* 连杆,摇块,导轨程序*/
void sgd()
{int i;
int x04,y04,x02,y02;
int l04b=800;
int l02a=95;
float xa,ya,xb,yb,l;
float ss,theta;
for(i=0;i<=63;i++) /*循环动画*/
{ss=i*0.1;
x04=350; x02=350; /*坐标计算*/
y04=320; y02=145;
xa=x02+l02a*cos(ss);
ya=y02+l02a*sin(ss);
l=sqrt((xa-x04)*(xa-x04)+(ya-y04)*(ya-y04)); xb=x04+(xa-x04)*l04b/l;
yb=y04+(ya-y04)*l04b/l;
theta=-atan((ya-y04)/(xa-x04));
setcolor(14);
cleardevice(); /*清屏*/
circle(xa+4,ya-8,3);
setcolor(2);
line(x02,y02,xa+4,ya-8);
line(xb,yb,x04,y04);
setcolor(9);
pirot(x02,y02,16); /*画支点Xo4,Xo2*/ pirot(x04,y04,16);
pist(xa,ya,20,10,theta);
delay(250);
}
}
③
五、设计总结
通过这次机械原理课程设计,本人受益匪浅。
这次课程是机械原理教学的一个重要组成部分。课程设计的目的在于进一步巩固和加深学生所学的理论知识,使其对于机械的组成结构,运动学以及动力学的分析与设计建立较完整的概念以及知识系统,培养学生独立分析和解决有关本课程实际问题以及进一步提高分析设计、查阅技术资料的能力和独立自主能力。更为重要的是培养开发和创新机械的能力。
为了培养学生开发和创新机械产品的能力,对机械原理课程设计提出的要求是:“结合一个简单的机械系统,综合运用所学理论和方法,使学生能受到拟定机械运动方案的初步训练,并能对方案中某些机构进行分析和设计”。我们以基本要求精神为指导,以适应当的开发、设计新产品为核心的科技进步需要而做的努力。其内容为:结合专业特点,选择工程实际的问题作为课程设计题目,对所选题目进行方案论证,定出两个较好的方案进行必要的分析、计算及绘图。
本课程设计以解析法为主,运用计算机辅助设计对选定的机构进行分析与设计。为了提高自己的自主创新能力有着很大的帮助。
六、参考文献
[1] 谭浩强编著.C程序设计(第二版).北京:清华大学出版社,1999
[2] 孙桓陈作模葛文杰著.机械原理(第七版)北京:高等教育出版社,2005
[3] 罗笑南,王若梅等著。计算机图形学广州:中山大学,1996.10
[4] 裘建新编著机械原理课程设计指导书北京:高等教育出版社2005.4
机械原理课程设计——牛头刨床
机械原理课程设计——牛头刨床(1)待续 2008-11-21 02:13 目录 一、概述 §1.1、课程设计的题目---------------------------------------2 §1.2.、课程设计的任务和目的-----------------------------2 §1.3、课程设计的要求---------------------------------------3 §1.4、课程设计的数据---------------------------------------3 二、运动分析及程序 §2.1、拆分杆组------------------------------------------------4 §2.2、方案分析------------------------------------------------4 §2.3、程序编写过程------------------------------------------5 §2.4、程序说明------------------------------------------------6 §2.5、C语言编程及结果------------------------------------6 §2.6、位移,速度,加速度图------------------------------10 三、各运动方案的分析与评价 §3.1 方案一的运动分析和评价--------------------------12 §3.2 方案二的运动分析和评价--------------------------13 §3.3 方案三的运动分析和评价--------------------------15 §3.4 方案四的运动分析和评价--------------------------16 四、小结--------------------------------------- 19 五、参考文献---------------------------------20 一、概述 §1.1.课程设计的题目 此次课程设计的题目是:牛头刨床的主传动结构的设计. §1.2.课程设计的任务和目的 1)任务: 1 牛头刨床的机构选型、运动方案的确定; 2 导杆机构进行运动分析; 3 导杆机构进行动态静力分析; 根据要求发挥自己的创新能力,设计4到5种牛头刨床的主传动机构,使其可以满足牛头刨床的传动需要。 2)目的:机械原理课程设计是培养学生掌握机械系统运动方案设计能力的技术基础课程,它是机械原理课程学习过程中的一个重要实践环节。其目的是以机械原理课程的学习为基础,进一步巩固和加深所学的基本理论、基本概念和基本知识,培养学生分析和解决与本课程有关的具体机械所涉及的实际问题的能力,使学生熟悉机械系统设计的步骤及方法,其中包括选型、运动方案的确定、运动学和动力学的分析和整体设计等,并进一步提高计算、分析,计算机辅助设计、绘图以及查阅和使用文献的综合能力。 §1.3.课程设计的要求 牛头刨床的主传动的从动机构是刨头,在设计主传动机构时,要满足所设计的机构要能使牛头刨床正常的运转,同时设计的主传动机构的行程要有急回运动的特性,以及很好的动力特性。尽量是设计的结构简单,实用,能很好的实现传动功能。 §1.4.课程设计的数据 方案导杆机构的运动分析导杆机构的动态静力分析
机械毕业设计1157牛头刨床六杆机构运动分析程序设计
摘要 在工程技术领域,经常会遇到一些需要反复操作,重复性很高的工作,如果能有一个供反复操作且操作简单的专用工具,图形用户界面就是最好的选择。如在本设计中对于牛头刨床平面六杆机构来说,为了保证结构参数与运动参数不同的牛头刨床的运动特性,即刨刀在切削过程中接近于等速运动从而保证加工质量和延长刀具寿命,以及刀具的急回性能从而提高生产率,这样的问题如果能够通过设计一个模型平台,之后只需改变参量就可以解决预期的问题,这将大大的提高设计效率。本设计中正是通过建立牛头刨床六杆机构的数学模型,然后用MA TLAB程序设计出一个友好的人机交互的图形界面,并将数学模型参数化,使用户只需改变牛头刨床的参数就可以方便的实现运动分析和运动仿真,用户可以形象直观地观察到牛头刨床的运动轨迹、速度变化及加速度变化规律。 关键词:牛头刨床六杆机构MA TLAB 运动仿真程序开发
Abstract In the engineering area, often repeatedly encountered some operational needs, repetitive highly, and if the operation can be repeated for a simple operation and dedicated tool graphical user interface is the best choice. As in the planer graphic design for six pole bodies, and campaigns to ensure the structural parameters of different parameters planer movement characteristics, planning tool in the process of cutting close to equal campaign to ensure processing quality and extended life cutlery and cutlery rush back to the performance enhancing productivity, If such issues can be adopted to design a model platform parameter can be changed only after the expected settlement, which will greatly enhance the efficiency of the design. It is through the establishment of this design planer six pole bodies mathematical model, and then use MATLAB to devise procedures of a friendly aircraft in the world graphics interface, and mathematical models of the parameters, so that users only need to change the parameters planer can facilitate the realization of movement analysis and sports simulation, Users can visual image observed in planer movement trajectories, speed changes and acceleration changes. Keywords:Planer 6 pole bodies MATLAB Campaign simulation Procedure development.
机械原理课程设计-牛头刨床(完整图纸)
机械原理课程设计说明书 系部名称: 机电系 专业班级: 04机制三班 姓名: 学号: 0405110057 目录
概述 (3) 设计项目...............................1.设计题目 (4) 2.机构简介 (4) 3.设计数据 (4) 设计内容...............................1.导杆机构的设计 (5) 2.凸轮机构的设计 (12) 3.齿轮机构的设计 (17) 设计体会 (20) 参考文献 (21) 附图····························· 概述
. 一、机构机械原理课程设计的目的: 机械原理课程设计是高等工业学校机械类专业学生第一次较全面的 机械运动学和动力学分析与设计的训练,是本课程的一个重要实践环节。其基本目的在于: (1)进一步加深学生所学的理论知识,培养学生独立解决有关本课程实际问题的能力。 (2)使学生对于机械运动学和动力学的分析设计有一较完整的概念。 (3)使学生得到拟定运动方案的训练,并具有初步设计选型与组合以及确定传动方案的能力。 (4)通过课程设计,进一步提高学生运算、绘图、表达、运用计算机和查阅技术资料的能力。 二、机械原理课程设计的任务: 机械原理课程设计的任务是对机械的主体机构(连杆机构、凸轮机构、齿轮机构以及其他机构)进行设计和运动分析、动态静力分析,并根据给定机器的工作要求,在此基础上设计凸轮、齿轮;或对各机构进行运动分析。要求学生根据设计任务,绘制必要的图纸,编写说明书。 三、械原理课程设计的方法: 机械原理课程设计的方法大致可分为图解法和解析法两种。图解法几何概念较清晰、直观;解析法精度较高。根据教学大纲的要求,本设计主要应用图解法进行设计。 [设计名称]牛头刨床 一.机构简介: 机构简图如下所示:
牛头刨床机构运动分析
高等机构学 题目: 牛头刨床机构运动分析 院系名称:机械与动力学院 专业班级:机械工程 学生姓名:学号: 学生姓名:学号: 学生姓名:学号: 指导教师: 2015年12 月17日
目录 一问题描述................................................................................................................................ - 1 -二运动分析................................................................................................................................ - 1 - 2.1矢量法构建机构独立位置方程 ............................................................................. - 1 - 2.2机构速度分析 ............................................................................................................. - 2 - 2.3机构加速度分析......................................................................................................... - 2 - 2.4机构运动线图绘制.................................................................................................... - 3 -三总结......................................................................................................................................... - 4 -附录一:Matlab程序............................................................................................................... - 4 -
机械原理课程设计牛头刨床导杆机构之欧阳光明创编
牛头刨床导杆机构的运动分析 欧阳光明(2021.03.07) 目录 1设计任务及要求…………………………… 2 数学模型的建立…………………………… 3 程序框图…………………………………… 4 程序清单及运行结果……………………… 5 设计总结…………………………………… 6 参考文献…………………………………… 机械原理课程设计任务书(一) 姓名郭娜专业机械工程及自动化班级机械08-3班学号0807100305 一、设计题目:牛头刨床导杆机构的运动分析 二、系统简图: 三、工作条件 已知:曲柄每分钟转数n2,各构件尺寸及重心位置,且刨头导路x-x位于导杆端点B所作圆弧高的平分线上。 四、原始数据
五、要求: 1)作机构的运动简图(A4或A3图纸)。 2)用C语言编写主程序调用子程序,对机构进行运动分析,并打印出程序及计算结果。 3)画出导轨4的角位移?,角速度? ,角加速度? 的曲线。 4)编写设计计算说明书。 指导教师: 开始日期:2010年7月10日完成日期:2010年7月16日 1. 设计任务及要求 要求 (1)作机构的运动简图。 (2)用C语言编写主程序调用子程序,对机构进行运动分析,动态显示,并打印程序及运算
结果。 (3)画出导轨的角位移Ψ,角速度Ψ’,角加速度Ψ”。 (4)编写设计计算说明书。 二、数学模型 如图四个向量组成封闭四边形,于是有 按复数式可以写成 a(cosα+isinα)-b(cosβ+isinβ)+d(cosθ
3+isin θ3)=0 (1) 由于θ3=90o,上式可化简为 a (cos α+isin α)-b(cos β+isin β)+id=0 (2) 根据(2)式中实部、虚部分别相等得 acos α-bcos β=0 (3) asin α-bsin β+d=0 (4) (3)(4)联立解得 β=arctan acosa asina d + (5) b= 2adsina d a 22++ (6) 将(2)对时间求一阶导数得 ω2=β’=b a ω1cos(α-β) (7) υc =b ’=-a ω1sin(α-β) (8) 将(2)对时间求二阶导数得 ε3=β”=b 1 [a ε1cos(α-β)- a ω21 sin(α-β)-2
六杆机构运动分析
机械原理课程设计 六杆机构运动分析 学院:工程机械 专业:机械设计制造及其自动化 班级:25041004 设计者:王东升于新宇 2013年 1月8日一、分析题目
如图1所示六杆机构,对其进行运动和动力分析。已知数据如表1所示。 r1=r3=L2=110mm ,L4=600mm ,L AD=39mm ,n1=40r/min ,L CS4=220mm. 图1 六杆机构 二、分析内容 (1)进行机构的结构分析; 如2图所示,建立直角坐标系。机构中活动构件为1、2、3、4、5,即活动构件数n=5。A、C、B、D、E处运动副为低副(6个转动副,1个移动副),共7个,即P l=7。则机构的自由度为:F=3n-2P l=3Χ5-2Χ7=1。 图2(a)图2(b) 图2(c) 如图2,拆出基本杆组,(a)为原动件,(b)、(c)为二级杆组,该机构是由机架0、原动件1和2个Ⅱ级杆组组成,故该机构是Ⅱ级机构。 (2)绘制滑块E的运行线图;
利用JYCAE软件求解。 1、将题设所给的原始数据(机构的活动构件数、转动副数、移动副数、己知长度值总数 和机构的自由度)分别输入JYCAE软件中,如图3: 图3—1
图3—2 图3—3
图3—4 2、机构的运动分析 输入完所有的原始数据以后,开始运动分析。求E点的运动线图,要选取基本单元5,但是利用基本单元5的条件是已知C点的运动状态,所以先利用基本单元1、2求得C点的运动状态,然后求的E点运动线图。如图4。 图4—1 解得B点运动参数
图4—2 解得C点运动参数 图4—3 解得E点运动参数共选取3个基本单元,如图4—4,然后运算。
牛头刨床设计 机械原理课程设计
中南大学 机械原理课程设计 ——说明书 班级:机械1007 姓名:台永丰 学号:0806100904 指导老师:何竞飞 分组:Ⅵ方案 题目:牛头刨床
目录 第1章 1.1设计题目........................................ (3) 1.2机构简介 (3) 1.3设计任务 (4) 第2章 2.1电动机的选择 (5) 2.2齿轮变速装置设计 (5) 2.3导杆机构尺寸设计 (6) 2.4机构的运动分析 (7) 2.5机构的动态静力分析 (16) 2.6速度波动的调节与飞轮设计 (19) 第3章 3.1体会心得 (22) 参考文献 (23)
第1章 1.1设计题目 牛头刨床 1.2机构简介 牛头刨床是一种用于平面切削加工的机床,如图1-1 a。电动机经一级带传动和二级齿轮传动驱动执行机构,使刨头6和刨刀7作往复直线运动。刨头右行时,刨刀进行切削加工,称为工作行程,要求速度较低并且均匀。刨头左行时,刨刀不进行切削,称为空回行程,要求速度快以节省时间。因此刨头在整个运动循环中受力变化大,对主轴(曲柄2)匀速运转有很大影响,故需安装飞轮来减小主轴的速度波动,以提高切削质量和减小电动机功率。同时,要求刨刀不进行切削的过程中,工件随工作台实现自动进给运动。 图1-1
1.3设计任务 (1)电动机的选择; (2)设计齿轮变速装置; (3)设计导杆机构; (4)设计刨程及其位置的调节方法; (5)机构运动分析; (6)机构的动态静力分析; (7)速度波动的调节与飞轮设计。 图1-2
第2章2.1电动机的选择 电动机转速选择1440r.p.m 2.2齿轮变速装置设计 如图1-2 i13H=n1?n H n3?n5=?z2z3 z1z2 ……………………………………[2-1] * 式中i——转速比 n——转速 z——齿数 i45=n4 n3=?z5 z4 …………………………………………[2-2] i67=n6 n7=?z7 z6 …………………………………………[2-3] 联立以上各式,并令n1n H n H n7 =24,可选取z1=50,z2=50,z3=150,z4=55,z5=78 可得各齿轮数据
牛头刨床机构运动分析
牛头刨床机构运动分析 程序编写: #include
机械原理课程设计牛头刨床导杆机构
牛头刨床导杆机构的运动分析 目录 1设计任务及要求…………………………… 2 数学模型的建立…………………………… 3 程序框图…………………………………… 4 程序清单及运行结果……………………… 5 设计总结…………………………………… 6 参考文献……………………………………
机械原理课程设计任务书(一) 姓名郭娜专业机械工程及自动化班级机械08-3班学号0807100305 五、要求: 1)作机构的运动简图(A4或A3图纸)。 2)用C语言编写主程序调用子程序,对机构进行运动分析,并打印出程序及计算结果。 3)画出导轨4的角位移?,角速度? ,角加速度? 的曲线。 4)编写设计计算说明书。 指导教师: 开始日期:2010年7月10 日完成日期:2010 年7月16日
1. 设计任务及要求 要求 (1)作机构的运动简图。 (2)用C语言编写主程序调用子程序,对机构进行运动分析,动态显示,并打印程序及运算结果。 (3)画出导轨的角位移Ψ,角速度Ψ’,角加速度Ψ”。 (4)编写设计计算说明书。 二、数学模型
如图四个向量组成封闭四边形,于是有 0321=+-Z Z Z 按复数式可以写成 a (cos α+isin α)-b(cos β+isin β)+d(cos θ3+isin θ3)=0 (1) 由于θ3=90o,上式可化简为 a (cos α+isin α)-b(cos β+isin β)+id=0 (2)
根据(2)式中实部、虚部分别相等得 acos α-bcos β=0 (3) asin α-bsin β+d=0 (4) (3)(4)联立解得 β=arctan acosa asina d + (5) b= 2adsina d a 22++ (6) 将(2)对时间求一阶导数得 ω2=β’= b a ω1cos(α-β) (7) υc =b ’=-a ω1sin(α-β) (8) 将(2)对时间求二阶导数得 ε3=β”= b 1[a ε1cos(α-β)- a ω2 1sin(α-β)-2υc ω2] (9) a c = b ”=-a ε1sin(α-β)-a ω2 1cos(α-β)+b ω2 2 (10) a c 即滑块沿杆方向的加速度,通常曲柄可近似看作均角速转动,则
平面六杆机构运动分析
平面六杆机构运动分析 2111306008 王健 1、 曲柄摇杆串RRP 型II 级杆组平面六杆机构数学模型 如图1所示,当曲柄1做匀速转动时,滑块5做往复移动,该机构的行程速比系数大于1,有急回特性,且传动角较大。设曲柄1的角速度为ω,并在铰链C 建立坐标oxy 。由图可知,该机构由构件1、2、3、6组成的曲柄导杆机构和构件3、4、5、6组成的摆动滑块机构组成。机构中错误!未找到引用源。 (i=1,2,3,4)分别表示曲柄l 、机架2、导杆3、连杆4的长度及滑块5的行程用5s 表示。曲柄转动中心A 的坐标(y x H H ,)。 图1 六杆机构运动简图 对构件1、2、3、6组成的曲柄导杆机构进行运动分析。曲柄1转动角度 ?、连杆2转动角度 错误!未找到引用源。 及摇杆3转动角度错误!未找到引用源。都是以X 轴正方向为起始边的度量角度,单位为rad 。并设机构初始位置为曲柄1转角 0=?的位置。该机构的位置方程为: ?θδππi i i i x i y e L e L e L e H e H 1232/+=++ (1) 式(1)中x 、y 轴的分量等式为:
{ θ?δθ?δcos cos cos cos sin sin 213213L L L H L L L H x y +=+-+=+ (2) 当 错误!未找到引用源。 在 3600-作匀速变化时,就可以求出对应的连杆2的转角 错误!未找到引用源。 以及摇杆3的转角δ的值。将式消去 错误!未找到引用 源。 ,得到: ()()22213213cos cos sin sin L L H L L H L x y =--+-+?δ?δ (3) 将(3)式分解,并分别定义: ()212122231cos )sin (??L H L H L L A x y ++-+-= )sin (2131?L H L B y -= )cos (2131?L H L C x += 摇杆3的角位移 ()]/)tan[(2112121211C A C A B B a --+-+=δ (4) 由(2)式可得连杆 2 的角位移 ]/)sin sin arcsin[(213L L L H y ?δθ-+= (5) 假设曲柄作匀角速度dt d /φω=是常数,对式2求时间导数,得到连杆2的角速度2ω以及摇杆3角速度3ω,方程式如下: ( )()][sin cos sin cos sin cos 11233322?ω?ωωωδδθθL L L L L L =-- (6) 对式(6)求时间导数, 得到连杆 2 的角加速度及摇杆 3 的角加速度2a ,方程式 如下: ()()] [cos cos cos sin sin sin sin cos sin cos 3232221232322212233322δωθ?ωδωθ?ωδ δθθL L w L L L w L a a L L L L -+-----= (7) 再对构件3、4、5、6 组成的摆动滑块机构进行运动分析。首先建立机构位置方程,方程如下: 2/3543πφδi i i e S e L e L += (8) 式中5S 为滑块的行程。 按同样的方法可分别得到滑块 5 的位置、速度、加速度方程。连杆4和滑块5的位置方程为:
机械原理牛头刨床课程设计
目录 一绪论 (1) 1.牛头刨床机构工作原理 (1) 2. 设计目的 (2) 3. 设计任务 (3) 二设计计算过程及说明 (3) 1. 牛头刨床机构示意图及原始数 据.............................................................. ..3 2.齿轮机构基本参 数…….…..........................................…........... (4) 3.连杆设计和运动分析 (5) 4. 编写的计算源程序................................................................... .. (7) 5. 电算的源程序和结果....................................................…............
(9) 6. 设计图解法的图纸................................................................... (13) 三设计小结 (13) 1. 对设计结果的分析讨 论 (13) 四参考文献 (13) 1. 列出主要参考资 料........................................................…... (13) 一. 绪论 牛头刨床机构工作原理 牛头刨床是一种靠刀具的往复直线运动及工作台的间歇运动来完成工件的平面切削加工的机床。电动机经过减速传动装置(皮带和齿轮传动)带动执行机构(导杆机构)完成刨刀的往复运动和间歇移动。 牛头刨床的滑枕的直线运动不能说是偏心轮的作用。牛头刨床的动力,经过减速后,在大齿轮的一面有一个固定短轴,短轴和齿轮中心有一定距离,装一个方形滑块。在齿轮的下方,有一个轴承座,安装了一个长摇杆,齿轮上的方形滑块始终在长杆上滑动。摇杆的上端,有滑枕的方形滑块,也是在杆上滑动,摇杆就使得滑枕前后运动。这两个滑块都是能够转动的。当大齿轮转动时,由滑块带动摇杆前后扇形摆动。滑块位置在中心下面时,同等的转动圆心角,摇杆可以运动较大的角度,带动滑枕快速后退。当大齿轮滑块在上方时,同样的圆心角,摇杆的运动就慢得多,这样滑枕就能够有较大的切削力。调整大齿轮滑块的中心距,就能够调整滑枕行程。滑枕是慢进快退,这样符合工作要求。 本实验以牛头刨床刀具运动的主传动机构为设计对象,通过对具有急回特性的机构的设计,掌握
(完整版)牛头刨床运动分析实例
例: 如图所示为一牛头刨床的机构运动简图。设已知各构件尺寸为:1125mm l =, 3600mm l =,4150mm l =,原动件1的方位角1=0~360θ??和等角速度1=1rad/s w 。试用 矩阵法求该机构中各从动件的方位角、角速度和角加速度以及E 点的位移、速度和家速度的运动线图。 解:先建立一直角坐标系,并标出各杆矢量及方位角。其中共有四个未知量3θ、4θ、3s 及 E s 。为求解需建立两个封闭矢量方程,为此需利用两个封闭图形ABCA 及CDEGC ,由此 可得, 613346,'E l l s l l l s +=+=+ (1-1) 写成投影方程为: 3311 33611334433446cos cos sin sin cos cos 0sin sin ' E s l s l l l l s l l l θθθθθθθθ==++-=+= (1-2) 解上面方程组,即可求得3θ、4θ、3s 及E s 四个位置参数,其中23θθ=。 将上列各式对时间取一次、二次导数,并写成矩阵形式,即可得以下速度和加速度方程式。 速度方程式:3331133331131334443344cos sin 00sin sin cos 00cos 0sin sin 1000cos cos 0E s l s s l w w l l w l l v θθθθθθθθθθ??--????????????????=??????---?????? ???????? g (1-3)
机构从动件的位置参数矩阵:333 33333443344cos sin 00sin cos 000sin sin 10cos cos 0s s l l l l θθθθθθθθ-????????---???? 机构从动件的的速度列阵:334E s w w v ?????? ???????? g 机构原动件的位置参数矩阵:1111sin cos 00l l θθ-???????????? 1w :机构原动件的角速度 加速度方程式: 333 333333344433443333333 3333333 33344433344cos sin 00sin cos 000sin sin 10cos cos 0sin sin cos 00cos cos sin 000cos cos 00 sin sin E s s s l l l l w s s w w s s w l w l w l w l w θθθθαθθαθθαθθθθθθθθθθ??-???????????? ??---?? ???????? ----=-----g g g g 11131113144cos sin 000E l w s l w w w w v θθ? ???-????????? ?-????+????????????? ??????? ????g (1-4) 机构从动件的位置参数矩阵求导:3333333 33 33333333444333444sin sin cos 00cos cos sin 000cos cos 00sin sin 0w s s w w s s w l w l w l w l w θθθθθθθθθθ? ? ---??? ?-????--? ?--???? g g 机构从动件的的加速度列阵:334E s ααα?? ???? ???????? g g
机械原理课程设计说明书(牛头刨床导杆机构的运动分析、动态静力分析)
青岛理工大学琴岛学院 课程设计说明书 课题名称:机械原理课程设计 学院:机电工程系 专业班级:机械设计制造及其自动化 学号: 学生: 指导老师: 青岛理工大学琴岛学院教务处年月日
《机械原理课程设计》评阅书
摘要 ——牛头刨床运动和动力分析 一、机构简介与设计数据 1、机构简介 牛头刨床是一种用于平面切削加工的机床,如图1-1a。电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。刨床工作时,由导杆机构2 –3 –4 –5 –6 带动刨头6和刨刀7作往复运动。刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生常率。为此刨床采用有急回作用的导杆机构。刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1 – 9 – 10 – 11 与棘轮带动螺旋机构(图中未画),使工作台连同工件做一次进给运动,以便刨刀继续切削。刨头在工作行程中,受到很大的切削阻力(在切削的前后各有一段约0.05H的空刀距离,图1-1b),而空回行程中则没有切削阻力。因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需安装飞轮来减小主轴的速度波动,以提高切削质量和减少电动机容量 a b 图
目录 摘要.............................................. I II 1设计任务 (1) 2 导杆机构的运动分析 (2) 导杆机构的动态静力分析 (4) 3.1运动副反作用力分析 (4) 3.2力矩分析 (6) 4方案比较 (7) 5总结 (10) 6参考文献 (10)
平面六杆机构的运动分析
机械原理大作业(一)平面六杆机构的运动分析 班级: 学号: 姓名: 同组者: 完成时间:
一.题目 1.1 说明 如图所示为一片面六杆机构各构件尺寸如表格1所示,又知原动件1以等角速度ω=1rad/s沿逆时针方向回转,试求各从动件的角位移、角加速度以及E点的位移、速度及加速度的变化情况。1.2 数据 组号L1L2L’2L3L4L5L6 x G y G 1-A 26.5 105.6 65.0 67.5 87.5 34.4 25.0 600 153.5 41.7 表格1 条件数据 1.3 要求 三人一组,编程计算出原动件从0~360o时(计算点数N=36)所要求各运动变量的大小,并绘制运动线图及点的轨迹曲线。
二.解题步骤 由封闭图形ABCD可得: 由封闭图形AGFECD可得 于是有: 112233 1122433 sin sin sin1 cos cos sin2 l l l l l l l θθθ θθθ +=-------- +=+----- / 1122225566 / 1122225566 cos cos sin cos cos153.53 sin sin cos sin sin41.74 l l l l l l l l l l θθθθθ θθθθθ +++=+---- +-+=+----- 对以上1到4导可得- 222333111 222333111 / 55566611122222 / 55566611122222 cos cos cos sin sin sin sin sin sin(sin cos) cos cos cos(cos sin) l l l l l l l l l l l l l l l l θωθωθω θωθωθω θωθωθωωθθ θωθωθωωθθ-+= -=- -=--- -=--+
机械原理大作业-牛头刨床运动分析(附图)
机械原理大作业 ——10A 班级:姓名:学号: 位置方程 利用两个封闭图形ABDEA 和EDCGE ,建立两个封闭矢量方程,由此可得: ? ??+=++=+' s l l s l l l l 56431 643(1)
把(1)式分别向x 轴、y 轴投影得: ??? ? ? ??=+=++=++=+ h l l s l l l h s l l h s l 334 45 334411133441 123344sin sin cos cos sin sin sin cos cos cos θθθθθθθθθθ(2) 在(2)式中包含3s 、5s 、3θ、4θ四个未知数,消去其中三个可得到只含4θ一个未知数 方程: [][]{}[ ] [] sin sin sin 2sin cos cos sin sin 2 441112 3 442 4 2242 441122 44111 =-+--+-++-+θθθθθθθθl l h l hl h l l l h l l h (3) 当1θ取不同值时,用牛顿迭代法解(3)式,可以求出每个4θ的值,再根据方程组(2)可以求出其他杆件的位置参数3s 、5s 、3θ的值: ? ?? ? ???-+=+=-= 3 4 41113334453 4 43sin sin sin cos cos )sin arcsin( θθθθθθθl l h s l l s l l h (4) 速度方程 对(2)式对时间求一次导数并把结果写成矩阵的形式得: ????????????-=????????????? ???????? ??? ? ?-----00cos sin 0 cos cos 01sin sin 00cos cos sin 0sin sin cos 11 111 434 43344334 43334 4333θθωωωθθθθθθθθθθl l v v l l l l l s l s C e B (5) 其中C v 为刨刀的水平速度,v e B 为滑块2相对于杆3的速度。由于每个1θ对应的3s 、3θ、 4θ已求出,方程组式(5)的系数矩阵均为常数,采用按列选主元的高斯消去法可求解(式 5)可解得角速度ω3、ω4、e B v 、 C v 加速度方程 把(5)对时间求导得矩阵式:
第3章 平面机构的运动分析答案
一、填空题: 1.速度瞬心是两刚体上瞬时速度相等的重合点。 2.若瞬心的绝对速度为零,则该瞬心称为绝对瞬心; 若瞬心的绝对速度不为零,则该瞬心称为相对瞬心。 3.当两个构件组成移动副时,其瞬心位于垂直于导路方向的无穷远处。当两构件组成高副时,两个高副元素作纯滚动,则其瞬心就在接触点处;若两个高副元素间有相对滑动时,则其瞬心在过接触点两高副元素的公法线上。 4.当求机构的不互相直接联接各构件间的瞬心时,可应用三心定理来求。 5.3个彼此作平面平行运动的构件间共有 3 个速度瞬心,这几个瞬心必定位于一条直线上。 6.机构瞬心的数目K与机构的构件数N的关系是K=N(N-1)/2 。 7.铰链四杆机构共有6个速度瞬心,其中3个是绝对瞬心。 8.速度比例尺μν表示图上每单位长度所代表的速度大小,单位为:(m/s)/mm 。 加速度比例尺μa表示图上每单位长度所代表的加速度大小,单位为(m/s2)/mm。 9.速度影像的相似原理只能应用于构件,而不能应用于整个机构。 10.在摆动导杆机构中,当导杆和滑块的相对运动为平动,牵连运动为转动时(以上两空格填转动或平动),两构件的重合点之间将有哥氏加速度。哥氏加速度的大小为2×相对速度×牵连角速度;方向为相对速度沿牵连角速度的方向转过90°之后的方向。 P直接标注在图上)。 二、试求出图示各机构在图示位置时全部瞬心的位置(用符号 ij
12 三、 在图a 所示的四杆机构中,l AB =60mm,l CD =90mm ,l AD =l BC =120mm ,ω2=10rad/s ,试用瞬心法求: 1)当φ=165°时,点C 的速度v C ; 2)当φ=165°时,构件3的BC 线上速度 a ) 24) 14(P 13) P 24 P 23→∞
牛头刨床-机械原理
摘要 机械原理课程是高等学校机械类近机类专业本、专科学生较全面地运用已学过的知识,特别是机械原理部分已学过的知识的知识第一次较全面地对一项工程实际的应用问题从任务分析、调查研究、方案比较、方案确定、绘制出机构运动简图、进行机械运动和动力学分析与设计的基本训练,是该课程的一个重要实践环节。其目的在于运用已学过的知识培养学生创新能力,用创新思想确定出解决工程实际问题的方案及其有关尺寸,并学会将方案绘制出机构运动简图的能力。培养学生对确定的机构运动简图进行机构运动分析及动力分析,学会按任务进行调研、实验、查阅技术资料、设计计算、制图等基本技能。并进一步提高计算、分析,计算机辅助设计、绘图以及查阅和使用文献的综合能力,学会运用团队精神,集体解决技术难点的能力。
目录 一、设计任务 (1) 1.1、牛头刨床的机构简介 (1) 1.2、原始数据及设计要求 (2) 1.3、设计内容 (3) 1.4、画机构的运动简图 (3) 二、导杆机构的运动分析 (4) 2.1、速度分析 (4) 2.2、加速度分析 (5) 三、导杆机构的动态静力分析 (7) 3.1、运动副反作用力分析 (7) 3.2、曲柄平衡力矩分析 (7) 总结 (8) 参考文献 (9)
一、设计任务 1.1、牛头刨床的机构简介 牛头刨床是一种用于平面切削加工的机床,如图所示。电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量,刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产率。为此刨床采用有急回作用的导杆机构。刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构,使工作台连同工件作一次进给运动,以便刨刀继续切削。刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需安装飞轮来减小主轴的速度波动,以提高切削质量和减小电动机容量。
牛头刨床机械原理课程设计5、12点
课程设计说明书—牛头刨床 1. 机构简介 牛头刨床是一种用于平面切削加工的机床。电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产率。为此刨床采用有急回作用的导杆机构。刨刀每次削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构,使工作台连同工件作一次进给运动,以便刨刀继续切削。刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。因此刨头在整个运动循环中,受力变化是很大的,这就
影响了主轴的匀速运转,故需安装飞轮来减少主轴的速度波动,以提高切削质量和减少电动机容量。 图1-1 1.导杆机构的运动分析 已知曲柄每分钟转数n2,各构件尺寸及重心位置,且刨头导路x-x位于导杆端点B所作圆弧高的平分线上。 要求作机构的运动简图,并作机构两个位置的速度、加速度多边形以及刨头的运动线图。以上内容与后面动态静力分析一起画在1号图纸上。 1.1设计数据
牛头刨床是一种用于平面切削加工的机床。电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。刨头右行时,刨刀进行切削,称工作切削。此时要求速度较低且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产效率。为此刨床采用急回作用得导杆机构。刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮机构带动螺旋机构,使工作台连同工件作一次进给运动,以便刨刀继续切削。刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需装飞轮来减小株洲的速度波动,以减少切削质量和电动机容量。 设计 导杆机构的运动分析 内容 符号n2L O2O4L O2A L o4B L BC L o4s4xS6yS6 mm 单位r/mi n 方案 60 380 110 540 0.25l o4B0.5 l o4B240 50 Ⅲ 1.2曲柄位置的确定