《机械设计基础》自由度

第一章平面机构的运动简图及自由度
一、填空题
1.两构件之间通过面接触形成的运动副称为(低副),两构件之间通过点或线接触组成的运动副称为(高副)。
2.组成机构的构件,根据运动副性质可分为三类:(固定构建/机架)、(主动件/原动件)、(从动件)。
3.具有两个摇杆的铰链四杆机构称为(双摇杆机构)
4.在机构中与其他约束重复而不起限制运动作用的约束称为(虚约束)
5.四杆机构中是否存在死点位置,决定于(从动件是否与连杆共线
6.作用力F与速度Vc之间所夹的锐角称为(压力角)
7.平面机构的自由度是该机构中各构件相对于机架所具有的(独立运动)的数目
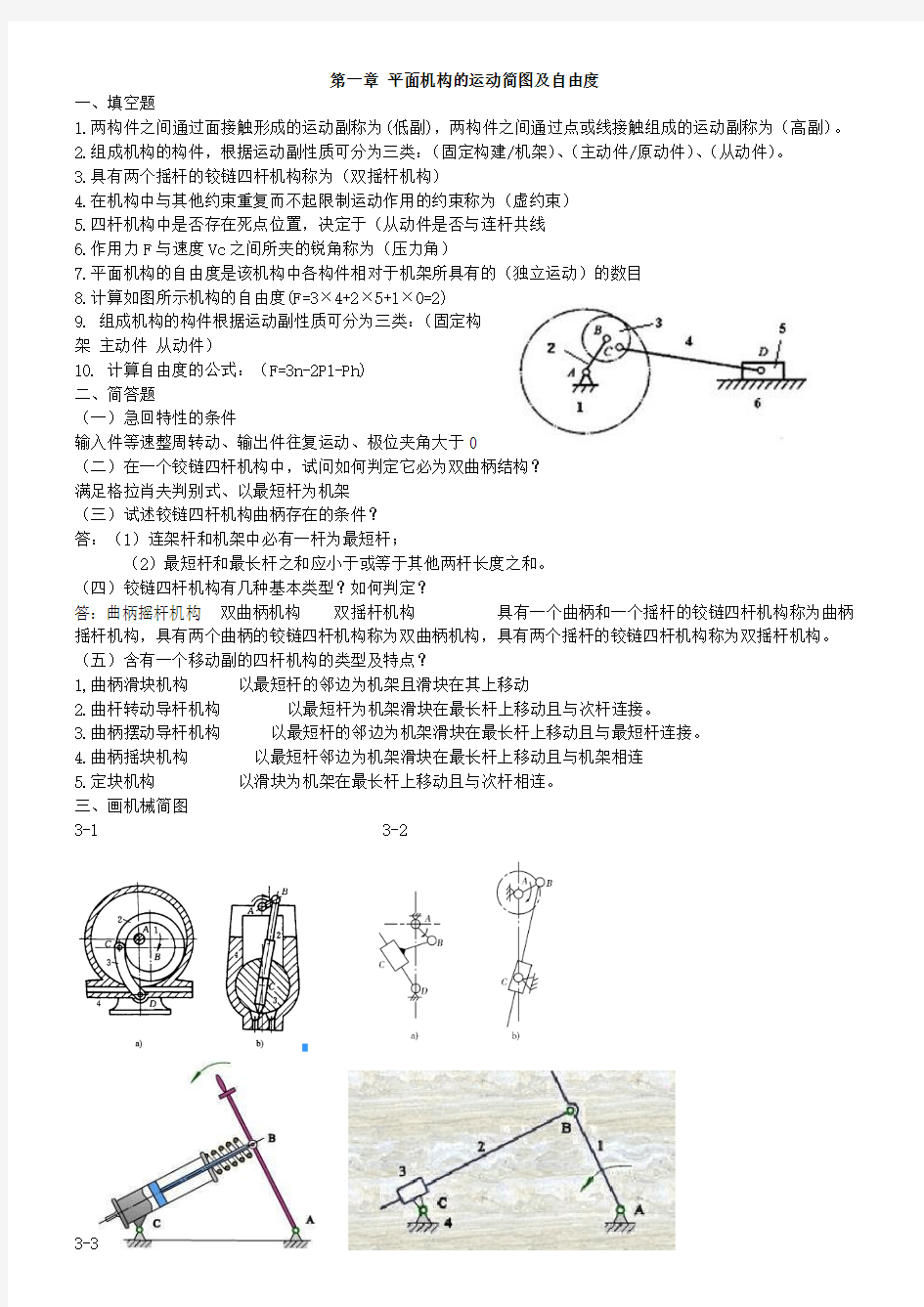
8.计算如图所示机构的自由度(F=3×4+2×5+1×0=2)
9. 组成机构的构件根据运动副性质可分为三类:(固定构
架主动件从动件)
10. 计算自由度的公式:(F=3n-2Pl-Ph)
二、简答题
(一)急回特性的条件
输入件等速整周转动、输出件往复运动、极位夹角大于0
(二)在一个铰链四杆机构中,试问如何判定它必为双曲柄结构?
满足格拉肖夫判别式、以最短杆为机架
(三)试述铰链四杆机构曲柄存在的条件?
答:(1)连架杆和机架中必有一杆为最短杆;
(2)最短杆和最长杆之和应小于或等于其他两杆长度之和。
(四)铰链四杆机构有几种基本类型?如何判定?
答:曲柄摇杆机构双曲柄机构双摇杆机构具有一个曲柄和一个摇杆的铰链四杆机构称为曲柄摇杆机构,具有两个曲柄的铰链四杆机构称为双曲柄机构,具有两个摇杆的铰链四杆机构称为双摇杆机构。(五)含有一个移动副的四杆机构的类型及特点?
1,曲柄滑块机构以最短杆的邻边为机架且滑块在其上移动
2.曲杆转动导杆机构以最短杆为机架滑块在最长杆上移动且与次杆连接。
3.曲柄摆动导杆机构以最短杆的邻边为机架滑块在最长杆上移动且与最短杆连接。
4.曲柄摇块机构以最短杆邻边为机架滑块在最长杆上移动且与机架相连
5.定块机构以滑块为机架在最长杆上移动且与次杆相连。
三、画机械简图
3-1 3-2
3-3
3-4
3-5
两构件之间通过点或线接触组成的运动副称为低副。(错)
两个以上构件组成两个或更多个共轴线的转动副称为复合链接。(对)
可通过计算测绘机构的自由度与实际机构元懂件数是否相等,来判断其运动的正确性和测绘的机构运动简图的正确性。(对)
机构是具有确定相对运动的构件组成。(对)
构件可以有一个零件组成,也可以有几个零件组成。(对)
四、计算自由度
1.解:N=5 pl=7 ph=0
F=3n-2pl-ph=3*5-2*7-0=1
2 解:这个机构有几个活动构件?有什么类型的
约束,分别是几个?有没有局部自由度与虚约
束?自由度是多少?
这个机构有4个活动构件;有5个低副、1个高副;有1个局部自由度(滚子D的
转动);有2个虚约束(滚子D与件4槽,两侧之一;E与F两个之一)。自由度是
1 。自由度= 3×4 - 2×5 - 1 = 1 。
3.
解:F=3x5-2x7-1x1=0
4
解:滚子为局部自由度。 F=3n-2Pl-Ph=3x8-2x11-1=1
5.计算内燃机机构的自由度。
6设平面机构中,有K个构件,除了固定的构件,活动构件数为n=K-1,高副数为PH,低副数为PL,则该平面机构的自由度F为: N=3 pl=4 ph=0 F = 3n-(2pL + pH )= 3×3-(2×4+0)=1
7设平面机构中,有K个构件,除了固定的构件,活动构件数为n=K-1,高副数为PH,低副数为PL
n = 2、pL = 2、pH= 1 F =3n-(2pL + pH ) = 3×2-(2×2+1)=1
(d图)
8设平面机构中,有K个构件,除了固定的构件,活动构件数为n=K-1,高副数为PH,低副数为PL
n = 5、pL= 7、pH = 0 F =3n-(2pL+ pH ) =3×5-(2×7+0)=1
9设平面机构中,有K个构件,除了固定的构件,活动构件数为n=K-1,高副数为PH,低副数为PL, 滚子绕中心转动是一个局部自由度。在计算自由度时可以假想滚子和从动件是一体的。
n = 2、pL= 2、pH = 1 F =3n-(2pL+ pH ) =3×2-(2×2+1)=1
10 解:图中机构的滚子F处是一个局部自由度;E和E′处是一个导路平行的虚约束,计算时计算为一个移动副;C处是一个复合铰链,应计算为2个转动副。
n = 7、pL= 9、pH = 1 F =3n-(2pL+ pH ) =3×7-(2×9+1)=2
1.构件是机构中具有相对运动的单元体,因此它是组成机构的主要要素之一。
2.若组成运动副的两构件间的相对运动是移动,则称这种运动副为移动副。
3.低副是通过面接触形成的运动副;高副是通过点接触或线接触组成的运动副。
4.在平面机构中,每增加一个低副将增加 2个约束。
5.如图1所示自由度为2。
6.某平面机构有5个低副,1个高副,机构自由度为1,则该机构具有4个活
动构件。
7.自由度小于或等于0时,构件不能(填“能”或“不能”)运动;自由度大于
等于1时,构件能(填“能”或“不能”)运动。
8.机车车轮联动机构要考虑虚约束吗?要
9.当由k个构件组成复合铰链时,则应当组成k-1个共线转动副。
10.计算机构自由度应注意的三个问题:复合铰链、局部自由度、虚约束。
(1)两个或两个以上的构件同时在一处用转动副相联接就构成复合铰链。(√)
(2)A个构件汇交而成的复合铰链应具有(A+1)个转动副。(错)
(3)计算机构自由度时, 应将机构中的局部自由度除去不计。(√)
(4)在平面机构中每个平面低副引进两个约束,使构件失去两个自由度;每个品面高副引入一个约束,使构件失去一个自由度。所以,当用PL个低副与PH个高副连接成构件之后,全部运动副所引入的约束总数为2PL+PH。(√)
(5)当机构中存在虚约束时,其消除办法时把含有虚约束的构件去掉,但其组
简图题1
2
34
5
F=3X7-2X10=1 7个活动构件,10个低副,D,N2,C为复合铰链
3X3-2X3-1X2=1 3个构件3个低副2个高副滑轮属于一个虚构件三
解:3个活动构件,4个低副,0个高副。所以自由度 F=3n-2P L-P H =3 X 3-2 X 4=1 四
F=3X5-2X7=1 5个活动构件,7个低幅
五
F=5X3-2X7=1 5个活动构件,7个低副
i计算图示系统的自由度。
1 ,解:n=4, PL=5, PH=1, F= 3n-2PL -PH=3×4-2×5-1=1。
2,解:n=6, PL=8, PH=1, F= 3n-2PL -PH=3×6-2×8-1=1
3,(AB//EF//CD) n=3,pl=4 F=3n-2pl=1
4. F=3n-2PL-PH=3×4-2×5-1=1 滚轮与连杆HF焊接在一起后,n=4,Pl=5,Ph=1;
5、
DE=FG=HI且相互平行,DF=EG且相互平行,DH=EI且相互平行。n=8,pl=11,ph=1 F=3n-2pl-ph=1
简答题
1.平面自由度的实用意义。(答:a判定机构运动设计方案是否合理。b改进不合理的运动设计方案,使之具有确定的相对运动。c判定测绘的机构运动简图是否正确。)
2.机构运动简图的绘制步骤是什么?(答:a.确定构件的类型和数目;b.确定运动副的种类和数目;c.合理选择视图;d.选定比例尺,绘制机构运动简图。)
3.构件系统成为有确定相对运动机构的充分必要条件是什么?(答:构件系统的自由度必须大于零,且原动件数与其自由度必须相等。)
4.计算平面机构自由度时应注意的几点。(答:a复合铰链。b局部自由度。c虚约束。)
5.什么是虚约束?虚约束的消除办法是什么?请简答。(答:在机构中与其他约束重复而不起限制运动作用的约束称虚约束。其消除办法是将含有虚约束的构建及其组成的运动副去掉。)
1.低副保留___1__个自由度,高副保留____2______个自由度。
2.机构具有确定运动的条件是机构的原动件数目等于机构的自由度数目
3.当由k个构件组合成复合铰链,则应当组成k-1个共线转动副。(陈以琴曹梦李国存)
4. 两构件之间通过面接触形成的运动副称为低副;(张祥,叶凯春,马磊)
5构件的组合能否成为机构,其必要条件为F>=1。(张祥,叶凯春,马磊)
6.两构件之间通过点或线接触组成的运动副称为高副。(史正康,赵昀,杨智勇)
7. 机构中构件根据运动副性质分为固定构件,主动件,从动件。
8. 自由度是构件可能出现的独立运动。任何一个构件在空间自由运动时皆有六个自由度。
9.两构建构成若干移动副,其导路均相互平行或重合时,则只有一个移动副起约束作用。
10. 虚约束可提高构件的强度,刚度,平稳性和机构工作的可靠性。
1.什么叫虚约束?在机构中与其他约束重复而不起限制运动作用的约束叫虚约束。
2. 什么叫做平面机构的自由度?
改正:在平面内,使机构具有确定运动时所必须给定的独立运动参数的数目,称为平面机构自由度。
3. 简述机构中构件的分类。答:固定机构(机架)、主动件(原动件)、从动件。
4. 计算自由度时需要考虑哪些事项? 复合铰链 局部自由度 虚约束
5.构件系统称为构件的充分必要条件是什么?构件系统的自由度必须大于零,且原动件数与其自由度必须相等。
1.当构件自由度〉﹦1时,机构一定能运动 错
2. 机构的主要作用之一是传递和变换运动。 (√)
3. 平面机构中的低副引入一个约束。(错)5.只要能够运动的构件系统就是机构。 (错)
4. 如果机构的原动件数少于自由度,就会出现运动不确定情况。 对)
四.计算自由度题
1.计算齿轮机构的自由度.
解:由于B. C 副中之一为虚约束,计算机构自由度时,应将 C 副去除。即如下图所示:
自由度1213233231=?-?-?=--=h p p n F
2. N=4, PL=5, Ph=1; 自由度342511F =?-?-=
3.
存在虚约束,下方的双滑块机构应略去。故自由构件数目仅为5,自由度计算
为:F=5*3-2*7=1 4. 自由度:F=3*7-2*9-1=2
定轴轮A
B
C
1 2 3
5. 存在虚约束,AO1、MN、BO3三根杆可任意去除一根,变成典型的四杆机构,其中机架为固定件,故运动件为3个,列式:F=3*3-2*4=1
6.计算下面机构的自由度
n=3,P L=4,P H=0,所以F=3*3-2*4=1
8. n=6,PL=8, Ph=1 F=3n-2P1=PH =3×6-2×8-1=1
9.解:这个机构有4个活动构件;有5个低副、1个高副;有1个局部自由度(滚子D的转动);有2个虚约束(滚子D与件4槽,两侧之一;E与F两个之一)。自由度= 3×4 - 2×5 - 1 = 1 。
10. B处局部自由度;G,H中有一个是虚约束,而D处是复合铰链
五.画图题
1. 2.
3. 画出下面机构的机械简图
4. 试绘制该机构的运动简图。
5. 如下图所示冲床刀架机构中,当偏心轮1绕固定中心A转到时,构件2绕活动中心C摆动,同时带着刀架3上下移动。B点为偏心轮的几何中心。试绘制该机构的运动简图。