新型曲柄式飞剪机的结构设计与受力分析
万方数据
万方数据
万方数据
万方数据
曲柄滑块机构运动分析
曲柄滑块机构运动分析 一、相关参数 在图1所示的曲柄滑块机构中,已知各构件的尺寸分别为mm l 1001=,mm l 3002=,s rad /101=ω,试确定连杆2和滑块3的位移、速度和加速度,并绘制出运动线图。 图1 曲柄滑块机构 二、数学模型的建立 1、位置分析 为了对机构进行运动分析,将各构件表示为矢量,可写出各杆矢所构成的封闭矢量方程。 将各矢量分别向X 轴和Y 轴进行投影,得 0sin sin cos cos 22112211=+=+θθθθl l S l l C (1) 由式(1)得 2、速度分析 将式(1)对时间t 求导,得速度关系 C v l l l l =--=+222111222111sin sin 0 cos cos θωθωθωθω (2) 将(2)式用矩阵形式来表示,如下所示 ??? ???-=??? ?????? ???-1111122222cos sin . 0 cos 1 sin θθωωθθl l v l l C (3) 3、加速度分析 将(2)对时间t 求导,得加速度关系 三、计算程序 1、主程序 %1.输入已知数据 clear; l1=; l2=; e=0; hd=pi/180; du=180/pi; omega1=10; alpha1=0;
%2.曲柄滑块机构运动计算 for n1=1:721 theta1(n1)=(n1-1)*hd; %调用函数slider_crank计算曲柄滑块机构位移、速度、加速度 [theta2(n1),s3(n1),omega2(n1),v3(n1),alpha2(n1),a3(n1)]=slider_crank(theta1(n1),omega1,alpha1,l1,l2,e); end figure(1); n1=0:720; subplot(2,3,1) plot(n1,theta2*du); title('连杆转角位移线图'); xlabel('曲柄转角\theta_1/\circ'); ylabel('连杆角位移/\circ'); grid on subplot(2,3,2) plot(n1,omega2); title('连杆角速度运动线图'); xlabel('曲柄转角\theta_1/\circ'); ylabel('连杆角速度/rad\cdots^{-1}'); grid on subplot(2,3,3) plot(n1,alpha2); title('连杆角加速度运动线图'); xlabel('曲柄转角\theta_1/\circ'); ylabel('连杆角加速度/rad\cdots^{-2}'); grid on subplot(2,3,4) plot(n1,s3); title('滑块位移线图'); xlabel('曲柄转角\theta_1/\circ'); ylabel('滑块位移/\m'); grid on
结构设计pkpm软件satwe计算结果分析 (2)
结构设计pkpm软件SATWE计算结果分析 SATWE软件计算结果分析 一、位移比、层间位移比控制 规范条文: 新高规的4.3.5条规定,楼层竖向构件的最大水平位移和层间位移角,A、B级高度高层建筑均不宜大于该楼层平均值的1.2倍;且A级高度高层建筑不应大于该楼层平均值的1.5倍,B级高度高层建筑、混合结构高层建筑及复杂高层建筑,不应大于该楼层平均值的1.4倍。高规4.6.3条规定,高度不大于150m的高层建筑,其楼层层间最大位移与层间之比(即最大层间位移角)Δu/h应满足以下要求: 结构休系Δu/h限值 框架 1/550 框架-剪力墙,框架-核心筒 1/800 筒中筒,剪力墙 1/1000 框支层 1/1000 名词释义: (1)位移比:即楼层竖向构件的最大水平位移与平均水平位移的比值。 (2)层间位移比:即楼层竖向构件的最大层间位移角与平均层间位移角的比值。 其中: 最大水平位移:墙顶、柱顶节点的最大水平位移。 平均水平位移:墙顶、柱顶节点的最大水平位移与最小水平位移之和除2。 层间位移角:墙、柱层间位移与层高的比值。 最大层间位移角:墙、柱层间位移角的最大值。 平均层间位移角:墙、柱层间位移角的最大值与最小值之和除2。 控制目的: 高层建筑层数多,高度大,为了保证高层建筑结构具有必要的刚度,应对其最大位移和层间位移加以控制,主要目的有以下几点: 1.保证主体结构基本处于弹性受力状态,避免混凝土墙柱出现裂缝,控制楼面梁板的裂缝数量,宽度。 2.保证填充墙,隔墙,幕墙等非结构构件的完好,避免产生明显的损坏。 3.控制结构平面规则性,以免形成扭转,对结构产生不利影响。 结构位移输出文件(WDISP.OUT) Max-(X)、Max-(Y)----最大X、Y向位移。(mm) Ave-(X)、Ave-(Y)----X、Y平均位移。(mm) Max-Dx ,Max-Dy : X,Y方向的最大层间位移
飞剪机的改进研究
目录 第二部分飞剪机改进研究 摘要 飞剪机是冶金板材行业最重要的装备之一,也是我国长期以来一直引进的重要的冶金设备的不断前进。 飞剪机通常由机械部分和控制部分组成。本文从机械组成部分和控制系统两个方面改进飞剪机,使其剪切速度与剪切质量提高,提升了它的生产效率。机械组成部分,主要改进了飞剪机构的齿轮,轴承,并对此进行了全面的计算校核;控制部分也把从新设计了plc程序。 本文的创新之处在于重新计算校核和飞剪机的齿轮轴承,使它更适合工作的需要;控制系统方面则从新设计了plc程序。本课题基于工程实际需要改进飞剪机,提高飞剪机的质量与效率。 关键词:飞剪机;机电控制
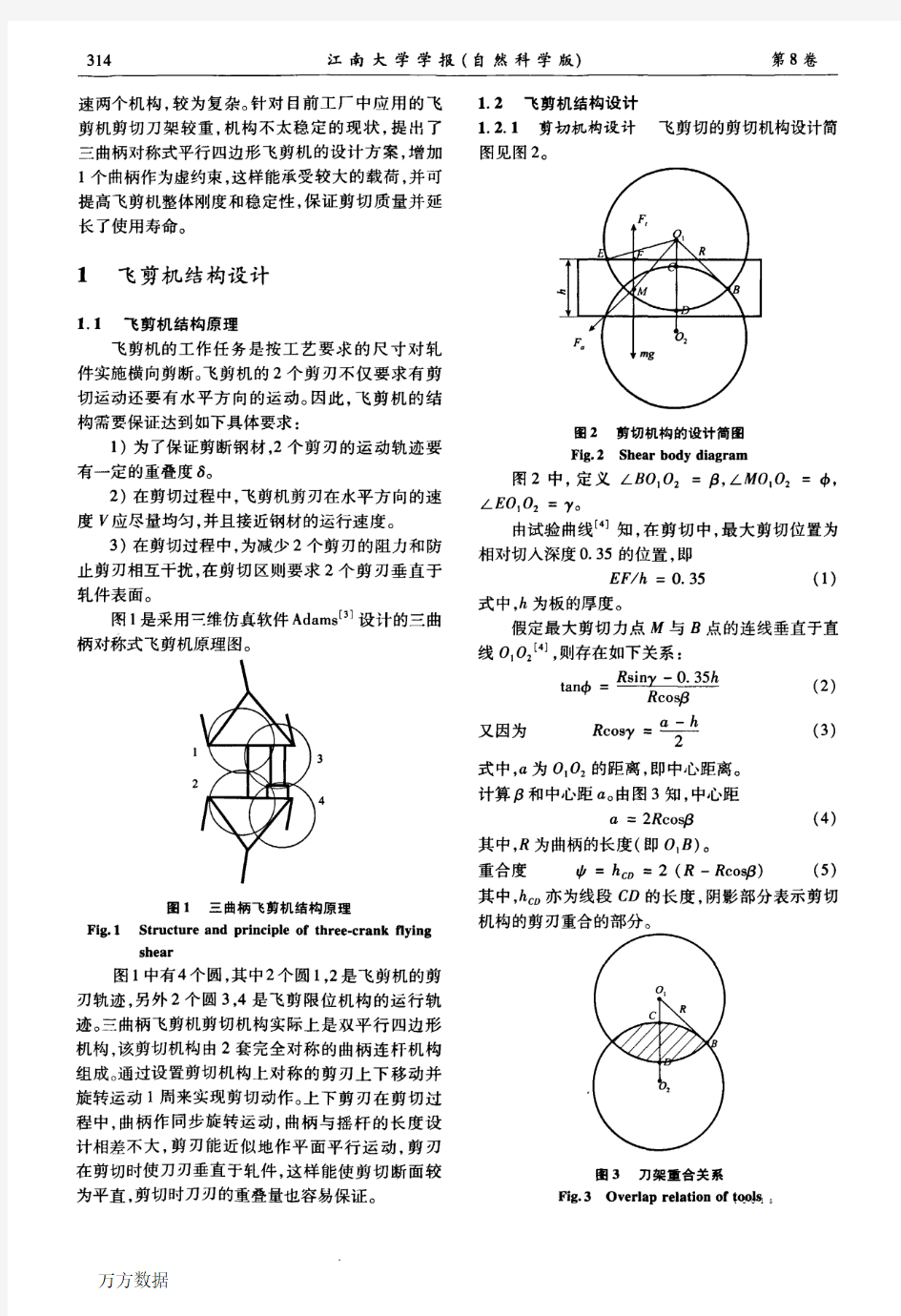
所谓飞剪机,是指横向剪切运动轧件,并满足用户定尺要求的设备。因而,飞剪机必需具备三个必要条件:1、剪切运动轧件时刀刃的水平分速度与轧件同步;2、飞剪机应能满足不同用户的定尺要求;3、剪切速度必须与生产线上其它设备匹配,以提高生产率。其基本工作原理是通过调速电机调节电机的转速来控制两剪刀轴的转速,根基送料机构的送给速度和所需的剪材的长短来计算两个剪刀旋转相遇的时间,从而可以计算出剪刀转轴的转速,通过对调速电机的速度的调节,从而得到剪材所需的材料的长度。 在棒线材生产线上,飞剪主要有滚筒式、曲柄式、组合式三种。滚筒式飞剪结构简单,回转半径大,剪切速度高,但剪切时其剪刃与轧件不垂直,剪刃对轧件有一个附加挤压力。若轧件断面越大,附加挤压力也越大,不仅剪切质量不好,剪刃也容易损坏。因此,滚筒式飞剪适合剪切断面小而速度高的轧件。曲柄式飞剪在剪切时其剪刃与轧件基本垂直,无附加挤压力,剪切质量高,但受结构限制,其曲柄回转半径小,剪切速度不高。因此,曲柄式飞剪适合剪切断面大速度低的轧件。 1.1 工作原理 飞剪是用来横向剪切运动中的轧件,所以,对飞剪的基本要求是剪刃在剪切轧件时要同时成剪切与移动两个动作,且其剪刃在轧件运行方向的瞬时分速度V应与轧件运行V基本相等。 速度 1.2 飞剪工作过程 旋转飞剪上下剪刃的运动轨迹都是圆。飞剪起动前,上剪刃处于待机位置,PLC将测量辊测得的板材通过长度及带材线速度等信号进行运算、处理,确定是否给出飞剪起动信号,当通过板长与设定定尺长度相接近时,PLC发出飞剪起动信号至直流调速系统控制剪刃以最短时间由位置经加速区至一点接触板材,进入同步区,并与板材线速度同步经EF区至F点剪断带材,再与板材同步经FG区至G点离开板材。最后经减速区回到机位置原始,等待下一次剪切。 1.3 研究思路 为了是飞剪机达到速度更快、精度更高、质量更好的要求,从飞剪机的齿轮,键,
曲柄滑块机构的运动分析及应用
机械原理课程机构设计 实验报告 题目:曲柄滑块机构的运动分析及应用 小组成员与学号:泽陆(11071182) 柯宇 (11071177) 熊宇飞(11071174) 保开 (11071183) 班级: 110717 2013年6月10日
摘要 (3) 曲柄滑块机构简介 (4) 曲柄滑块机构定义 (4) 曲柄滑块机构的特性及应用 (4) 曲柄滑块机构的分类 (8) 偏心轮机构简介 (9) 曲柄滑块的动力学特性 (10) 曲柄滑块的运动学特性 (11) 曲柄滑块机构运行中的振动与平衡 (14) 参考文献 (15) 组员分工 (15)
摘要 本文着重介绍了曲柄滑块机构的结构,分类,用途,并进行了曲柄滑块机构的动力学和运动学分析,曲柄滑块机构的运动学特性分析,得出了机构压力表达式,曲柄滑块机构的运动特性分析,得出了滑块的位移、速度和加速度的运动表达式。最后,对曲柄滑块机构运动中振动、平衡稳定性等进行了总结。 关键字:曲柄滑块动力与运动分析振动与平稳性 ABSTRACT The paper describes the composition of planar linkage, focusing on the structure, classification, use of a slider-crank mechanism and making the dynamic and kinematic analysis, kinematics characteristics of the crank slider mechanism analysis for a slider-crank mechanism, on one hand , we obtain the drive pressure of the slider-crank mechanism ,on the other hand,we obtain the expression of displacement, velocity and acceleration of movement. Finally, the movement of the vibration and balance stability of the crank slider mechanism are summarized.
飞剪机传动装置设计说明书 -
机械设计课程设计计算说明书 设计题目:飞剪机传动装置设计 院系:机械工程及自动化学院 班级:130715班 指导老师:张建斌 2016年6月6日
目录 目录 ...................................................................................... 错误!未定义书签。 一、飞剪机总体方案设计: ............................................................................. - 4 - 1.1 滚筒式飞剪机 ................................................................................... - 4 - 1.2 曲柄连杆式飞剪机............................................................................. - 5 - 1.3曲柄摇杆式飞剪机............................................................................. - 5 - 二、电动机选型:........................................................................................... - 8 - 2.1类型和结构形式的选择: ................................................................... - 9 - 2.2确定电机的额定功率:....................................................................... - 9 - 2.3确定电机的转速:............................................................................. - 9 -三.传动系统的运动和动力参数....................................................................... - 9 - 3.1计算传动比.................................................................................. - 10 - 3.2传动比分配..................................................................................... - 10 - 3.3确定各轴运动和动力参数 ................................................................. - 10 - 四、齿轮的设计与校核.................................................................................. - 12 - 4.1高速级齿轮的设计与校核 .................................................................. - 12 - 4.2低速级齿轮的设计与校核 .................................................................. - 18 - 4.3开式齿轮的设计与校核...................................................................... - 24 -五.轴的设计与校核 ..................................................................................... - 28 - 5.1高速轴的设计与校核......................................................................... - 28 - 5.2中间轴的设计与校核......................................................................... - 31 - 5.3低速轴的设计与校核......................................................................... - 34 -
曲柄滑块机构的运动分析及应用修订版
曲柄滑块机构的运动分析及应用修订版 IBMT standardization office【IBMT5AB-IBMT08-IBMT2C-ZZT18】
机械原理课程机构设计 实验报告 题目:曲柄滑块机构的运动分析及应用 小组成员与学号:刘泽陆(11071182) 陈柯宇 (11071177) 熊宇飞(11071174) 张保开 (11071183) 班级: 110717 2013年6月10日 摘要 (3) 曲柄滑块机构简介 (4) 曲柄滑块机构定义 (4) 曲柄滑块机构的特性及应用 (4) 曲柄滑块机构的分类 (8) 偏心轮机构简介 (9)
曲柄滑块的动力学特性 (10) 曲柄滑块的运动学特性 (11) 曲柄滑块机构运行中的振动与平衡 (14) 参考文献 (15) 组员分工 (15) 摘要 本文着重介绍了曲柄滑块机构的结构,分类,用途,并进行了曲柄滑块机构的动力学和运动学分析,曲柄滑块机构的运动学特性分析,得出了机构压力表达式,曲柄滑块机构的运动特性分析,得出了滑块的位移、速度和加速度的运动表达式。最后,对曲柄滑块机构运动中振动、平衡稳定性等进行了总结。 关键字:曲柄滑块动力与运动分析振动与平稳性 ABSTRACT The paper describes the composition of planar linkage, focusing on the structure, classification, use of a slider-crank mechanism and making the dynamic and kinematic analysis, kinematics characteristics of the crank slider mechanism analysis for a slider-crank mechanism, on one hand , we obtain the drive pressure of the slider-crank mechanism ,on the other hand,we obtain the expression of displacement, velocity and acceleration of movement. Finally, the movement of the vibration and balance stability of the crank slider mechanism are summarized.
建筑结构选型实例分析报告
建筑结构选型实例分析 第一章 悬挑结构:现代MOMA 1.工程概况: 当代MOMA位于东直门迎宾国道北侧,拥有首都北京的地标优势,项目规划建筑面积22万平方米,其中住宅为13.5万平方米,配套商业面积达8.5万平方米,包括多厅艺术影院,画廊,图书馆等文化展览设施,还包括了精品酒店,国际幼儿园,顶级餐饮,顶级俱乐部及健身房、游泳池、网球馆等生活设施与体育休闲设施。 当代MOMA由纽约的哥伦比亚大学教授StevenHoll设计,项目规划概念是BEIJINGLINKEDHYBRID,在建筑艺术方面实现了世界的唯一,更加充分的发掘城市空间的价值,将城市空间从平面、竖向的联系进一步发展为立体的城市空间。当代MOMA也是当代置业科技主题地产的延续与发展,在万国城Moma实现高舒适度、微能耗的基础上,将大规模使用可再生的绿色能源。从可持续的观点出发,当代MOMA适当的高密度(强度)开发利用土地与大规模使
用可再生的绿色能源是大城市发展的方向,是真正“节能省地型”的项目。 在当代MOMA的规划设计中,更多考虑了未来城市的生活模式,引入了复合功能的概念,实现开放功能的城市社区,在这里不单是居住功能,而且能够和谐的工作,娱乐、休闲消费、交通,作为一个汇集精品商业与国际文化的开放社区,充满生气与活力,将创造更和谐的国际化生活氛围,不仅为社区创造更舒适的环境,更多的交往机会,也将完善城市区域功能,为北京的城市形象,为北京奥运会增添光彩。项目计划2005年初开始建设,在2008年奥运会之前建成使用。 2.结构形式: 为减轻自重,梁柱采用H型钢,并且设置了受拉的钢斜撑,提高悬挑结构的刚度和承载力.为承受悬挑部分重力荷载产生的倾覆力矩,在悬挑部分增设钢斜撑,将倾覆力矩传递到塔楼上;在塔楼相应的部位增设钢管斜撑。使塔楼整体承受倾覆力矩。在塔楼内除设置核心筒外。还设置了十字型剪力墙,提高塔楼整体的刚度和抗倾覆能力。长悬挑是本工程主要设计难点之一,目前主体结构竖向构件采用了中震不屈服的性能目标,对于悬挑结构这样更加重要的部分,设计中采用了中震弹性设计的更高的性能目标,即悬挑部分的构件验算时,按中震弹性地震力(水平地震和竖向地震)与竖向荷载进行组合,考虑荷载分项系数,材料强度取设计值。经中震弹性设计验算,悬挑部位构件的应力比基本上都控制在0.9以下。 3.施工情况: 物业公司:第一物业服务有限公司 建筑面积:220000平方米 绿化率:34% 使用率:80% 容积率:2.64 建设规模:地上21层、地下两层
建筑结构选型案例分析(1)
1 混合结构体系 混合结构体系概述 混合结构是指承重的主要构件是用钢筋混凝土和砖木建造的。如一幢房屋的梁是用钢筋混凝土制成,以砖墙为承重墙,或者梁是用木材建造,柱是用钢筋混凝土建造。由两种或两种以上不同材料的承重结构所共同组成的结构体系均为混合结构。混合结构,又可以说是砖混结构.虽然也用钢筋浇柱\梁,但墙体具是承重功能,不能乱拆. 特点:质量较框架略差,质量较好,寿命较长.造价略低,适合6层以下,横向刚度大,整体性好,但平面灵活性差。 分类:型钢柱+混凝土梁+混凝土筒归入混凝土结构 型钢柱/钢管混凝土+钢梁+混凝土筒归入型钢框架混凝土核心筒结构 实例工程项目概况 金茂大厦(JinMaoTower),又称金茂大楼,位于上海浦东新区黄浦江畔的陆家嘴金融贸易区,楼高米,是上海目前第2高的摩天大楼(截至2008年)、中国大陆第3高楼、世界第8高楼。大厦于1994年开工,1999年建成,有地上88层,若再加上尖塔的楼层共有93层,地下3层,楼面面积27万8,707平方米,有多达130部电梯与555间客房,现已成为上海的一座地标,是集现代化办公楼、五星级酒店、会展中心、娱乐、商场等设施于一体,融汇中国塔型风格与西方建筑技术的多功能型摩天大楼,由著名的美国芝加哥SOM设计事务所的设计师Adrian Smith设计。因为中国人喜欢塔所以中国才把金茂大厦设计成这样。 实例工程项目结构选型与结构布置分析 其结构体系为巨型型钢混凝土翼柱+ 内筒混合结构体系。这种混合结构体系的巨型型钢混凝土柱和钢筋混凝土内筒通过刚性大梁构成一个整体的抗侧力体系, 而且其抗侧力体系的力矩很大, 效率很高。这种体系还可提供较大的使用空间, 其外围洞口可以做得很大。 2框架结构体系 框架结构体系概述 框架结构是利用梁柱组成的纵、横向框架,同时承受竖向荷载及水平荷载的
常用结构分析设计软件之比较
常用结构软件比较 目前的结构计算程序主要有:PKPM系列(TAT、SATWE)、TBSA系列(TBSA、TBWE、TBSAP)、BSCW、GSCAD、 SAP系列。其他一些结构计算程序如ETABS等,虽然功能强大,且在国外也相当流行,但国内实际上使用的不多,故不做详细讨论。 一、结构计算程序的分析与比较 1、结构主体计算程序的模型与优缺点 从主体计算程序所采用的模型单元来说 TAT和TBSA属于结构空间分析的第一代程序,其构件均采用空间杆系单元,其中梁、柱均采用简化的空间杆单元,剪力墙则采用空间薄壁杆单元。在形成单刚后再加入刚性楼板的位移协调矩阵,引入了楼板无限刚性假设,大大减少了结构自由度。 SATWE、TBWE和TBSAP 在此基础上加入了墙元,SATWE和TBSAP还加入了楼板分块刚性假设与弹性楼板假设,更能适应复杂的结构。SATWE提供了梁元、等截面圆弧形曲梁单元、柱元、杆元、墙元、弹性楼板单元(包括三角形和矩形薄壳单元、四节点等参薄壳单元)和厚板单元(包括三角形厚板单元和四节点等参厚板单元)。另外,通过与JCCAD的联合,还能实现基础-上部结构的整体协同计算。TBSAP提供的单元除了常用的杆单元、梁柱单元外,还提供了用以计算板的四边形或三角形壳元、墙元、用以计算厚板转换层的八节点四十八自由度三维元、广义单元(包括罚单元与集中单元),以及进行基础计算用的弹性地基梁单元、弹性地基柱单元(桩元)、三角形或四边形弹性地基板单元和地基土元。TBSAP可以对结构进行基础-上部结构-楼板的整体联算。 从计算准确性的角度来说 SAP84是最为精确的,其单元类型非常丰富,而且能够对结构进行静力、动力等多种计算。最为关键的是,使用SAP84时能根据结构的实际情况进行单元划分,其计算模型是最为接近实际结构。 BSCW和GSCAD的情况比较特殊,严格说来这两个程序均是前后处理工具,其开发者并没有进行结构计算程序的开发。但BSCW与其计算程序一起出售,因此有必要提一下。BSCW一直是使用广东省建筑设计研究院的一个框剪结构计算软件,这个程序应属于空间协同分析程序,即结构计算的第二代程序(第一代为平面分析,第二代为空间协同,第三代为空间分析)。GSCAD则可以选择生成SS、TBSA、TAT或是SSW的计算数据。SS和SSW均是广东省建筑设计研究院开发的,其中SS采用空间杆系模型,与TBSA、TAT属于同一类软件;而SSW根据其软件说明来看也具有墙元,但不清楚其墙元的类型,而且此程序目前尚未通过鉴定。 薄壁杆件模型的缺点是: 1、没有考虑剪力墙的剪切变形。 2、变形不协调。
建筑结构选型案例分析
1 混合结构体系 1.1混合结构体系概述 混合结构是指承重的主要构件是用钢筋混凝土和砖木建造的。如一幢房屋的梁是用钢筋混凝土制成,以砖墙为承重墙,或者梁是用木材建造,柱是用钢筋混凝土建造。由两种或两种以上不同材料的承重结构所共同组成的结构体系均为混合结构。混合结构,又可以说是砖混结构.虽然也用钢筋浇柱\梁,但墙体具是承重功能,不能乱拆. 特点:质量较框架略差,质量较好,寿命较长.造价略低,适合6层以下,横向刚度大,整体性好,但平面灵活性差。 分类:型钢柱+混凝土梁+混凝土筒归入混凝土结构 型钢柱/钢管混凝土+钢梁+混凝土筒归入型钢框架混凝土核心筒结构 1.2 实例工程项目概况 金茂大厦(JinMaoTower),又称金茂大楼,位于上海浦东新区黄浦江畔的陆家嘴金融贸易区,楼高420.5米,是上海目前第2高的摩天大楼(截至2008年)、中国大陆第3高楼、世界第8高楼。大厦于1994年开工,1999年建成,有地上88层,若再加上尖塔的楼层共有93层,地下3层,楼面面积27万8,707平方米,有多达130部电梯与555间客房,现已成为上海的一座地标,是集现代化办公楼、五星级酒店、会展中心、娱乐、商场等设施于一体,融汇中国塔型风格与西方建筑技术的多功能型摩天大楼,由著名的美国芝加哥SOM设计事务所的设计师Adrian Smith设计。因为中国人喜欢塔所以中国才把金茂大厦设计成这样。 1.3 实例工程项目结构选型与结构布置分析 其结构体系为巨型型钢混凝土翼柱+ 内筒混合结构体系。这种混合结构体系的巨型型钢混凝土柱和钢筋混凝土内筒通过刚性大梁构成一个整体的抗侧力体系, 而且其抗侧力体系的力矩很大, 效率很高。这种体系还可提供较大的使用空间, 其外围洞口可以做得很大。 2框架结构体系 2.1框架结构体系概述 框架结构是利用梁柱组成的纵、横向框架,同时承受竖向荷载及水平荷载的
Autodesk Robot 结构设计分析软件标准入门手册
Autodesk Robot 结构设计分析软件 标准入门手册
目录 Autodesk Robot 结构设计分析软件 快速浏览 (1) 软件概述 (3) Robot模块 (3) Robot的页面布局 (5) 软件的基本配置 (6) 首选项 (6) 工程首选项 (7) 导航功能 (8) Robot工作界面的使用方法 (10) 系统菜单 (10) 文件菜单 (11) 编辑菜单 (11) 浏览菜单 (12) 图形菜单 (12) 荷载菜单 (12) 分析菜单 (13)
结果菜单 (13) 设计菜单 (13) 工具菜单 (14) 窗口菜单 (14) 帮助菜单 (14) 布置系统 (15) 输入结构分析数据 (18) 分析结构 (22) 结果预览 (24) 梁的示意图 (24) 面的示意图 (26) 彩图结果 (28) 结构元素的设计 (29) 钢构件和木构件的设计 (29) 钢连接设计 (32) RC设计 (34) 所需钢筋面积(理论值)的计算 (34) 假设钢筋面积的计算 (35) 报告及输出计算书 (37) 快捷键列表 (39) 三维框架结构 (41) 软件配置 (43)
模块定义 (44) 杆的定义(二维框架)……………………………………… 44 约束的定义 (45) 2D椼架的定义 (46) 荷载定义 (47) 特殊荷载工况下荷载的定义 (48) 复制已有框架 (52) 横向梁的定义 (53) 交叉约束的定义 (54) 复制已定义的杆(梁横截面或支撑) (56) 结构分析 (57) 结果预览 (58) 以图形的形式预览梁的结构 (58) 以表格的形式预览杆的结构 (60) 压力分析 (61) 打印前的准备 (64) “捕捉”视图和计算记录的数据 (64) 准备输出的计算书 (65) 打印输出计算报告 (67) RC和钢混合结构 (71) 程序的配置 (73)
伺服系统在钢板飞剪机中的应用
伺服系统在钢板飞剪机中的应用
2008-5-24 19:31:00 来源: 网友评论 0 条 点击查看
1 飞剪应用介绍 飞剪应用于钢铁加工行业, 是指在钢板送料过程中驱动剪切刀运动实现钢材的定长 剪切。因为飞剪运动在剪切过程中不需停止送料,并能在加工过程中自由修改剪断长 度和送料速度,所以大大提高钢板剪切的加工效率。
宇奇提供全系列大功率范围的同步/异步伺服电机以及高性能 B maXX 系列伺服驱 动器。B maXX 系列伺服驱动器由驱动级 PLC 控制,该驱动级 PLC 通过背板总线与 伺服驱动器快速同步存取/访问数据,并支持 IEC 61131-3 多任务实时操作系统。 Baumueller 公司专为飞剪、旋切和追剪等应用开发了系列功能块,方便实现这三类应 用。 2 系统结构 下图为包米勒飞剪应用的系统构成。其送料单元由送料驱动系统控制,负责平稳无 打滑的送料;剪切单元由剪切伺服系统控制,它根据设定的切断长度和送料的速度, 驱动剪切刀对钢板进行定长剪切。伺服系统控制参数如切断长度、送料速度等由人机 界面输入;材料的速度和位置由编码器反馈到剪切驱动系统。 3 运动方式 剪切单元采用偏心轴方式传动,并采用机械同步定位轴,保证上下两个刀座定向、 同速、定位,使剪切刀固定刀座作回转运动。其中剪切刀速度和送料速度同步的区域 称为同步区,同步区内上下刀刃咬合的区域为剪切区域,同步区之外的运动区域称之 为补偿区。
包米勒飞剪应用中剪切刀运动轨迹分为同步区和补偿区, 其运动方式也分为同步运 动和补偿运动。同步运动为剪切电机在同步区与材料速度和位置实现同步,其间上刀 刃和下刀刃咬合,完成对钢板的剪切过程;而离开同步区后,根据切断长度的不同, 剪切刀需要加速或者减速来补偿,以适用不同的切断长度,即为补偿运动。根据切断 长度的不同,有三种不同的补偿运动方式: 1. 长料切断 剪断长大于两倍刀刃周长情况下, 在剪切周期中刀刃在剪断动作完成后减速并停止 在设定点,然后加速进入同步区。 2. 中料切断 剪断长大于刀刃周长但小于两倍刀刃周长情况下, 剪断动作完成后减速但不停止在 设定点,过设定点加速进入下一次剪切,见左图。 3. 短料切断 剪断长小于刀刃周长情况下,剪断动作一旦完成马上加速到设定点,然后减速进入 下一次剪断。 目前已经成功将包米勒伺服控制用于钢板飞剪机械, 希望能与您共同分享钢板飞剪 成功的经验,协助您开发钢板飞剪机床。
结构设计pkpm软件SATWE计算结果分析报告
学习笔记 PMCAD中--进入建筑模型与荷载输入: 板荷:点《楼面恒载》会有对话框出来,选上自动计算现浇楼板自重,然后在恒载和活载项输入数值即可,一般恒载要看楼面的做法,比如有抹灰,找平,瓷砖,吊顶什么的,在民用建筑中可以输2.0,活载就是查荷载规范。梁间荷载:PKPM中梁的自重是自己导入的,所以梁间荷载是指梁上有隔墙或者幕墙或者女儿墙之内在建模时不建的构建,把他们折算成均布荷载就行。比如,一根梁上有隔墙,墙厚200mm,层高3000mm,梁高500mm,如果隔墙自重为11KN/m3,那么恒载为11*(3000-500)*200+墙上抹灰的自重什么的即可。 结构设计pkpm软件SATWE计算结果分析 SATWE软件计算结果分析 一、位移比、层间位移比控制 规范条文: 新高规的4.3.5条规定,楼层竖向构件的最大水平位移和层间位移角,A、B级高度高层建筑均不宜大于该楼层平均值的1.2倍;且A级高度高层建筑不应大于该楼层平均值的1.5倍,B级高度高层建筑、混合结构高层建筑及复杂高层建筑,不应大于该楼层平均值的1.4倍。高规4.6.3条规定,高度不大于150m的高层建筑,其楼层层间最大位移与层间之比(即最大层间位移角)Δu/h应满足以下要求: 结构休系Δu/h限值 框架 1/550 框架-剪力墙,框架-核心筒 1/800 筒中筒,剪力墙 1/1000 框支层 1/1000 名词释义: (1)位移比:即楼层竖向构件的最大水平位移与平均水平位移的比值。 (2)层间位移比:即楼层竖向构件的最大层间位移角与平均层间位移角的比值。 其中: 最大水平位移:墙顶、柱顶节点的最大水平位移。 平均水平位移:墙顶、柱顶节点的最大水平位移与最小水平位移之和除2。 层间位移角:墙、柱层间位移与层高的比值。 最大层间位移角:墙、柱层间位移角的最大值。 平均层间位移角:墙、柱层间位移角的最大值与最小值之和除2。 控制目的: 高层建筑层数多,高度大,为了保证高层建筑结构具有必要的刚度,应对其最大位移和层间位移加以控制,主要目的有以下几点:
曲柄滑块机构运动分析
曲柄滑块机构运动分析 Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998
曲柄滑块机构运动分析 一、相关参数 在图1所示的曲柄滑块机构中,已知各构件的尺寸分别为 mm l 1001=,mm l 3002=,s rad /101=ω,试确定连杆2和滑块3的位移、速度和加速度,并绘制出运动线图。 图1 曲柄滑块机构 二、数学模型的建立 1、位置分析 为了对机构进行运动分析,将各构件表示为矢量,可写出各杆矢所构成的封闭矢量方程。 将各矢量分别向X 轴和Y 轴进行投影,得 0sin sin cos cos 22112211=+=+θθθθl l S l l C (1) 由式(1)得 2、速度分析 将式(1)对时间t 求导,得速度关系 C v l l l l =--=+222111222111sin sin 0 cos cos θωθωθωθω (2) 将(2)式用矩阵形式来表示,如下所示 ??????-=????????????-11 11122222cos sin . 0 cos 1 sin θθωωθθl l v l l C (3) 3、加速度分析 将(2)对时间t 求导,得加速度关系 三、计算程序 1、主程序 %1.输入已知数据 clear;
l1=; l2=; e=0; hd=pi/180; du=180/pi; omega1=10; alpha1=0; %2.曲柄滑块机构运动计算 for n1=1:721 theta1(n1)=(n1-1)*hd; %调用函数slider_crank计算曲柄滑块机构位移、速度、加速度 [theta2(n1),s3(n1),omega2(n1),v3(n1),alpha2(n1),a3(n1)]=slider_crank(theta1(n1),omega1,alpha1 ,l1,l2,e); end figure(1); n1=0:720; subplot(2,3,1) plot(n1,theta2*du); title('连杆转角位移线图'); xlabel('曲柄转角\theta_1/\circ'); ylabel('连杆角位移/\circ'); grid on subplot(2,3,2) plot(n1,omega2); title('连杆角速度运动线图'); xlabel('曲柄转角\theta_1/\circ'); ylabel('连杆角速度/rad\cdots^{-1}'); grid on
设计院常用结构计算软件比较
常用结构软件比较 摘要:本人在设计院工作,有机会接触多个结构计算软件,加上自己也喜欢研究软件,故对各种软件的优缺点有一定的了解。现在根据自己的使用体会,从设计人员的角度对各个软件作一个评价,请各位同行指正。本文仅限于混凝土结构计算程序。 关键词:结构软件结构设计 目前的结构计算程序主要有:PKPM系列(TAT、SATWE)、TBSA系列(TBSA、TBWE、TBSAP)、BSCW、GSCAD、SAP系列。其他一些结构计算程序如ETABS等,虽然功能强大,且在国外也相当流行,但国内实际上使用的不多,故不做详细讨论。 一、结构计算程序的分析与比较 1、结构主体计算程序的模型与优缺点 从主体计算程序所采用的模型单元来说 TAT和TBSA属于结构空间分析的第一代程序,其构件均采用空间杆系单元,其中梁、柱均采用简化的空间杆单元,剪力墙则采用空间薄壁杆单元。在形成单刚后再加入刚性楼板的位移协调矩阵,引入了楼板无限刚性假设,大大减少了结构自由度。SATWE、TBWE 和TBSAP在此基础上加入了墙元,SATWE和TBSAP还加入了楼板分块刚性假设与弹性楼板假设,更能适应复杂的结构。SATWE提供了梁元、等截面圆弧形曲梁单元、柱元、杆元、墙元、弹性楼板单元(包括三角形和矩形薄壳单元、四节点等参薄壳单元)和厚板单元(包括三角形厚板单元和四节点等参厚板单元)。另外,通过与JCCAD的联合,还能实现基础-上部结构的整体协同计算。TBSAP提供的单元除了常用的杆单元、梁柱单元外,还提供了用以计算板的四边形或三角形壳元、墙元、用以计算厚板转换层的八节点四十八自由度三维元、广义单元(包括罚单元与集中单元),以及进行基础计算用的弹性地基梁单元、弹性地基柱单元(桩元)、三角形或四边形弹性地基板单元和地基土元。TBSAP可以对结构进行基础-上部结构-楼板的整体联算。 从计算准确性的角度来说 SAP84是最为精确的,其单元类型非常丰富,而且能够对结构进行静力、动力等多种计算。最为关键的是,使用SAP84时能根据结构的实际情况进行单元划分,其计算模型是最为接近实际结构。BSCW和GSCAD的情况比较特殊,严格说来这两个程序均是前后处
飞剪机
内蒙古科技大学 本科生毕业设计说明书(毕业论文)
题 目:高线 1145 飞剪机设计 学生姓名:赵 文 军 学 号:0608123223 专 业:机械设计制造及其自动化 班 级:机 2006-2 班 指导教师:刘云峰 教授
内蒙古科技大学毕业设计说明书(毕业论文) 高线 1145 飞剪机设计 摘要
飞剪机是用来剪切横向运动的轧件。他可以装设在连续式轧机的轧制作用线上。随着连续式轧 机的发展,飞剪机的到越来越广泛的应用。飞剪机的类型很多,我设计的飞剪机采用曲柄连杆形式。 传动方式利用单电机传动,机身自带一级减速器。通过曲柄轴、刀架和摆杆可使刀片在剪切区作近 似平移的运动,以获得平整的剪切断面。
设计的主要任务是:确定适合的设计方案;选择符合给定设计参数的电动机和主要的零部件,包 括轴、齿轮、刀架等。最后对机器的安装、润滑与维护做了简单的介绍。目的是设计出符合设计要 求的飞剪机。 关键词:飞剪机;电动机;减速器;润滑。
I
内蒙古科技大学毕业设计说明书(毕业论文)
1145 high-wire flying shear design
Abstract Flying Shear is used to cut horizontal movement rolling 。 He can be installed in continuous rolling mill line of action。With the development of continuous rolling mill, shearing machine to fly more and more widely used。Many types of flying shear, I design the form by connecting rod。Transmission use of a single motor drive, Body comes with a reducer. Through the crank shaft, blade knife, and the pendulum could shift in the shear zone as similar to the movement to get the flat cut section. Design of the main tasks are to determine a suitable design Chosen for a given design parameters of the motor and the main components, including shafts, gears, knife, etc. Finally, the machine's installation, lubrication and maintenance made a brief introduction. Purpose is to design a line with the design requirements of flying shear.
Key words: Flying sheer; Electric motor; Reducer; Lubricating.
II
平面连杆机构及其方案与分析
第二章平面连杆机构及其设计与分析 §2-1 概述 平面连杆机构<全低副机构):若干刚性构件由平面低副联结而成的机构。 优点: (1)低副,面接触,压强小,磨损少。 (2)结构简单,易加工制造。 (3)运动多样性,应用广泛。 曲柄滑块机构:转动-移动 曲柄摇杆机构:转动-摆动 双曲柄机构:转动-转动 双摇杆机构:摆动-摆动 (4)杆状构件可延伸到较远的地方工作<机械手) (5)能起增力作用<压力机) 缺点: <1)主动件匀速,从动件速度变化大,加速度大,惯性力大,运动副动反力增加,机械振动,宜于低速。 <2)在某些条件下,设计困难。 §2-2平面连杆机构的基本结构与分类 一、平面连杆机构的基本运动学结构 铰链四杆机构的基本结构 1.铰链四杆机构 所有运动副全为回转副的四杆机构。 BC-连杆 AB、CD-连架杆 连架杆:整周回转-曲柄 往复摆动-摇杆 2.三种基本型式
(1)曲柄摇杆机构 定义:两连架杆一为曲柄,另一为摇杆的铰链四杆机构。 特点:、 0~360°, 、<360° 应用:鳄式破碎机缝纫机踏板机构揉面机 (2)双曲柄机构 定义:两连架杆均作整周转动的铰链四杆机构。 由来:将曲柄摇杆机构中曲柄固定为机架而得。 应用特例:双平行四边形机构