基于调制函数的SVPWM算法
2008年 2 月电工技术学报Vol.23 No.2 第23卷第2期TRANSACTIONS OF CHINA ELECTROTECHNICAL SOCIETY Feb. 2008
基于调制函数的SVPWM算法
陆海峰1瞿文龙1张磊1张星1樊扬1程小猛1
靳勇刚2肖波2
(1. 清华大学电机工程与应用电子技术系电力系统国家重点实验室北京 100084
2. 中国南车集团株洲电力机车研究所株洲 412001)
摘要为了避免复杂的三角函数和求根运算,便于数字信号处理器的实时运算,提出一种新的SVPWM算法。采用SPWM中调制波与载波相比较的规则采样思路,通过在静止坐标系下直接计算每个参考电压矢量所对应的三相调制波的函数值,进而得到每相电压在一个PWM周期中的占空比。该算法的主要特点是计算简单,只需要普通的四则运算, 适用于数字化系统。在扇区划分和占空比饱和的处理上较传统SVPWM算法更简便,且过调制范围也略有拓展,具有很大的实用性。仿真和实验结果证实了该算法的有效性。
关键词:电压型逆变器空间矢量脉宽调制异步电动机调制函数过调制
中图分类号:TM 464
SVPWM Algorithm Based on Modulation Functions
Lu Haifeng1 Qu Wenlong1 Zhang Lei1 Zhang Xing1 Fan Yang1
Cheng Xiaomeng1 Jin Yonggang2 Xiao Bo2
(1. Tsinghua University Beijing 100084 China
2. Zhuzhou Electric Locomotive Research Institute Zhuzhou 412001 China)
Abstract In order to avoid complex calculation of triangle functions and square root, and realize feasibly real-time calculation by DSP, a new space vector pulse width modulation(SVPWM) algorithm is developed. Coming from the idea of SPWM regular sampling in which the modulated wave compares with carrier, by directly calculating the corresponding three-phase modulated wave function values of the reference voltage vector in the static frame, the PWM duty ratio of every phase voltage is then obtained. The principle of the algorithm is introduced and the formulas of PWM calculation are derived in the paper. It just contains the four fundamental arithmetic operations, and it is suitable in the digital systems. In addition, it is more convenient than traditional PWM calculation in the sector dividing and the duty ratio saturation dealing, and the range of over-modulation is some few extended. So the algorithm has good practicality. The results of simulation and experiment verify the validity of the method.
Keywords:Voltage source inverter (VSI), space vector pulse width modulation (SVPWM), induction motor, modulation function, over modulation
1引言
随着电力电子技术和微处理器的发展,脉宽调制(Pulse Width Modulation,PWM)技术在电力传动领域得到了广泛应用。在各种PWM技术中,空间矢量PWM(Space Vector PWM,SVPWM)技术以其调制比高和易于数字化的优点,在高性能全数字化交流调速系统中得到了较多应用[1-2]。
在一般的数字化系统中,其CPU(如单片机或
国家“863”高技术项目(2005AA501130)。收稿日期 2007-01-26 改稿日期 2007-4-20
38
电 工 技 术 学 报 2008年2月
者DSP )通常不支持单周期的除法、三角函数和求根等运算,要实现它们需要付出远远多于乘法或加减法的时间。另一方面,为了减小谐波,PWM 的开关频率往往从几kHz 到几十kHz 不等,对计算的实时性提出了较高要求。因此,对PWM 算法加以简化,在工程中有实际意义[3-4]。
SVPWM 的思想是在一个PWM 周期内用两个相邻有效矢量的加权组合来合成目标电压矢量,因此算法的关键是确定有效矢量的权重(即占空比)或作用时间t I 、t II 。现有文献中的算法主要有两类:一类用参考电压矢量的模和角度来计算t I 、t II [1, 5-7];另外一类则在静止直角坐标系下求取t I 、t II [8-9]。这些一般都需要若干四则运算和查表操作,有的在计算中还需用到三角函数或者求根计算[1, 7, 10],在实现中将占用大量CPU 时间。
本文提出一种适用于数字化系统的实用简化SVPWM 算法,该算法将正弦PWM (Sinusoidal PWM ,SPWM )的思想与SVPWM 算法相结合,直接计算ABC 三相的调制函数来配置相应的定时寄存器,从而避免三角函数和求根运算,使得计算过程大为简化。文中先给出改进的扇区划分和占空比计算方法,继而推导出每相的调制函数。并通过仿真和实验证明了该方法的有效性。
2 SVPWM 与SPWM 原理
为简便起见,本文不考虑开关器件的死区效应。 一般地,SPWM 是基于载波比较的原理产生PWM 波形的。在数字系统中,通常利用规则采样
的方法来实现,如图1所示。
图1 规则采样 Fig.1 Regular sampling
这里,载波)(t g 为幅值等于1的三角波,调制波)(t f 为关于时间t 的函数(称之为调制函数)
。按照规则采样,PWM 波形的占空比与PWM 周期中点 的调制函数值)(0t f 有关
01()
2
f t k +=
(1) 对SPWM 而言,其调制函数为关于t 的正弦函数
SPWM ()sin( )f t m t ω= (2)
式中 ω——基波角频率
m ——调制波峰值与载波峰值之比[11] 当m >1时,比较器输出就会在一段时间内处于饱和状态,输出基波分量的幅值u 1和输入调制波幅值m 不再保持简单的线性关系,且输出波形产生畸变,谐波增加。因此,SPWM 的最大线性调制比为1,相应的输出相电压幅值为直流母线电压的一半,即V dc /2[5, 8]。
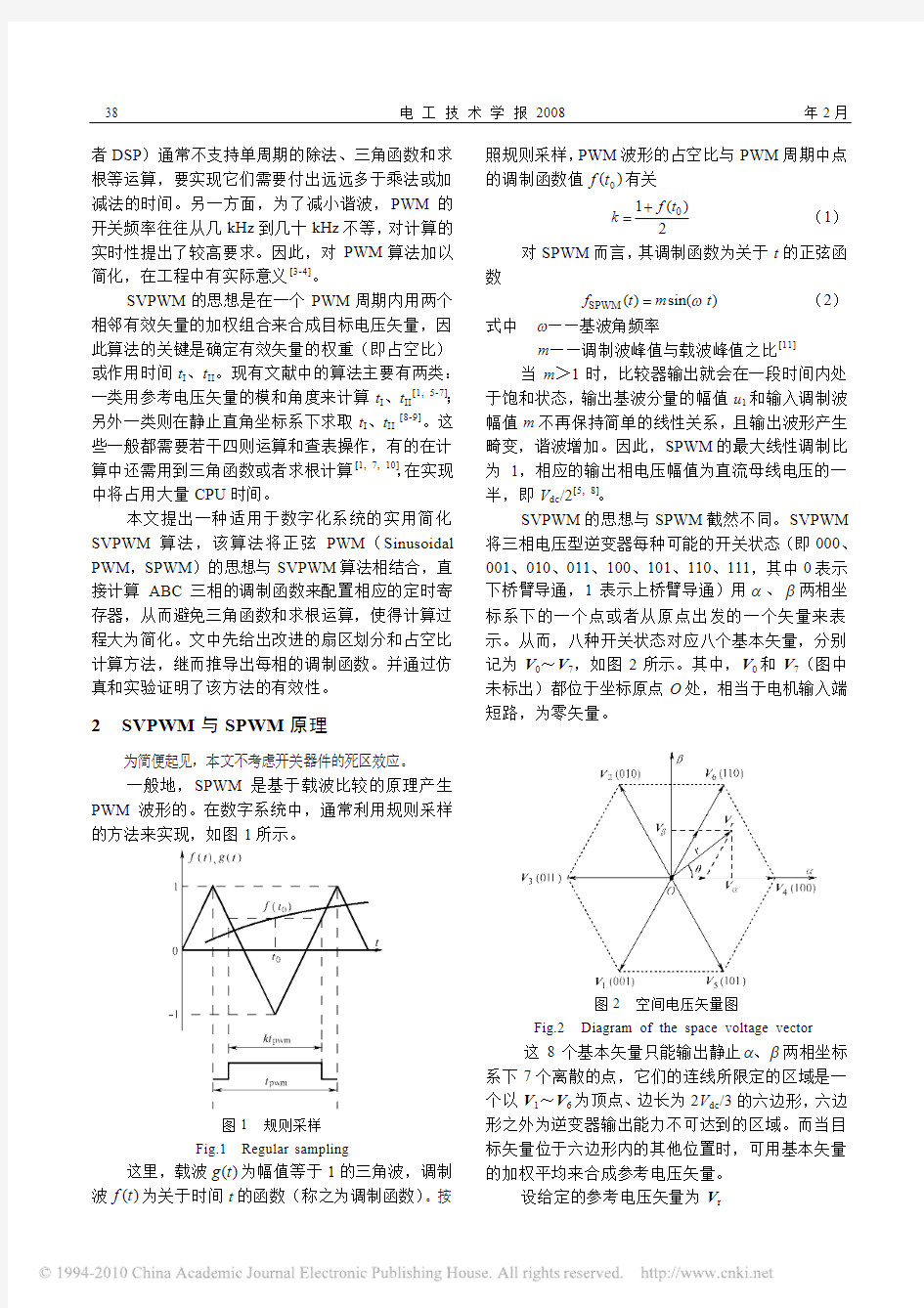
SVPWM 的思想与SPWM 截然不同。SVPWM 将三相电压型逆变器每种可能的开关状态(即000、001、010、011、100、101、110、111,其中0表示下桥臂导通,1表示上桥臂导通)用α、β两相坐标系下的一个点或者从原点出发的一个矢量来表示。从而,八种开关状态对应八个基本矢量,分别记为V 0~V 7,如图2所示。其中,V 0和V 7(图中未标出)都位于坐标原点O 处,相当于电机输入端
短路,为零矢量。
图2 空间电压矢量图
Fig.2 Diagram of the space voltage vector
这8个基本矢量只能输出静止α、β 两相坐标系下7个离散的点,它们的连线所限定的区域是一
个以V 1~V 6为顶点、边长为2V dc /3的六边形,六边形之外为逆变器输出能力不可达到的区域。而当目标矢量位于六边形内的其他位置时,可用基本矢量的加权平均来合成参考电压矢量。
设给定的参考电压矢量为V r
第23卷第2期
陆海峰等 基于调制函数的SVPWM 算法 39
r j V V r αβθ=+=∠V (3)
式中 V α, V β——V r 在α、β坐标系下的分量
r
——V r 幅值 θ ——相角
则有(以图2所示位置为例)
r 4466k k =+V V V (4)
式中,4V ,6V —— 合成目标矢量用的有效矢量
4k , 6k —— 相应的加权系数(即占空比) 为与上面的调制比定义相符合,定义SVPWM 的调制比为
dc /2
r m V =
(5)
注意到图2中六边形最大内切圆的半径为
dc V ,可知SVPWM 的最大线性调制比
为2≈1.1547,比SPWM 提高了15%左右[5-6]。
SVPWM 可以看作是一种带谐波注入的调制方
法,其隐含调制波(鞍形波)相当于正弦波与零序 分量的叠加[5]。下文将通过推导,给出由V α、V β通 过简单四则运算直接计算隐含调制函数的公式,无需采取零序分量注入的方法,因而更加简便实用,适合数字系统实现。
在数字系统中,PWM 算法的实现可以在得到有效矢量的作用时间t I 、t II 后,采用某些处理器内置的空间矢量机实现(如TI 公司的24x 、24xx 系列DSP ),有文献称之为硬件方式[1];另一种比较通用的做法是利用定时器实现,但需要在计算得到t I 、t II 后再查表,计算得到定时寄存器的计数值[1-8]。
3 扇区划分
以六个基本非零矢量为界,每60°一个扇区,可以将空间电压矢量六边形划分成六个扇区,在不同的扇区内用以合成目标电压矢量的有效矢量也不同。通常以0~60°作为第一扇区,然后按照逆时针为序顺序编号
[3, 9]
,也有文献中采取不连续编号的
方式[1]。但一般都需要查表[1]或者通过一系列逻辑判断[9]来确定扇区编号。
本文采取图3所示的扇区划分方式,图中的扇区号以二进制数001…110表示。
为了判断参考电压矢量V r 位于哪个扇区,首先将其分解到图3中的xyz 三相坐标系,得到x 、y 、z 三个分量
dc dc dc 22x V y V z V β
αβαβ??=??????
?=
?????
???
????=???????
(6)
图3 扇区划分 Fig.3 Division of sectors
观察式(6)可以发现,如果先将参考电压矢量作预处理,
令
r r dc
V ?V
,然后再按照dc V =进
行计算,可使式(6)简化(只含常系数)
2
2x V V y V z βαβαβ=??
???=
??
??=??
(7)
以下推导均假设dc V =。记
4*sign()2*sign()1*sign()A x B y C z =??
=??=?
(8) 式中
10sign()00x x x ≥?=?
(9)
则参考电压矢量所在扇区编号为
||K A B C A B C =++= (10)
式中“|”为“位或”运算。
4 SVPWM 算法下的矢量分解
4.1 有效占空比的计算
确定参考电压矢量所在扇区后,就可以通过矢量分解计算得到有效矢量的占空比了。以101扇区
≥
40 电工技术学报 2008年2月
dc
=,可得
dc
4
dc
46
6
dc
2
33
V k
k
V k
α
β
=+=
(11)
从而
4
6
31
22
1
V
k z
V
k x
α
β
?
==(12)
可见,这样比文献[8]中的方法省略了一组运算
过程,因为x y z的数值在判断扇区的时候已经算出
来了,只需根据扇区号查表选择即可,如图4所示。
图中I k、II k分别是第一、第二个有效矢量(以逆时
针为序,如101扇区的第一个有效矢量是V4,第二
个有效矢量是V6)的占空比。
图 4 查表确定有效矢量占空比
Fig.4 Determining duty ratio of active vector
对于对称PWM,则有效矢量在半个PWM周
期内的作用时间为
pwm
I I
pwm
II II
2
2
t
t k
t
t k
?
=
??
?
?=
??
(13)
4.2调制函数的计算
下面以A相为例,根据已求得的有效矢量占空
比,推导每相PWM脉冲的占空比与Vα、Vβ的关系。
首先分析当参考电压矢量所在扇区和A轴(与
图5中的α轴重合)相邻时的情况。例如,当V r1
位于第001扇区时,如图5所示,第一个有效矢量
V5(101)的占空比(记为k5)为?x,第二个有效矢
量为V4(100)的占空比(记为k4)为?y。按照对
称七段式SVPWM的规则,取零矢量V0(000)和
V7(111)的占空比为07
1()()
2
x y
k k
????
==。则A
相占空比为
A547
1
22
x y
k k k k
+
=++=?(14)
由式(7)可知x y z
+=?,所以
A
1
22
z
k=+(15)
由占空比和调制函数的关系式(1)可得调制
函数的值为
A
f zβ
==(16)
其几何意义如图5所示。从V r1向z轴作垂线
(即边V4V5的平行线),交z轴于F点,交A轴于
H点。记z轴与V4V5的交点为G,z轴与V2V3的交
点为E。则A相调制函数
A
4
OF OH
f OF z
OG O
====
V
(17)
占空比
3
A
34
1
22
H
EF EF z
k
EG
+
====
V
V V
(18)
由分析可以得到,与A轴相邻的扇区(001、
101、010、110)均有类似的结论。
图5 A相调制函数的几何意义
Fig.5 Geometrical meaning of modulation function (phase A)
当参考电压矢量所在扇区与A轴不相邻,即在
011、100扇区时,情况将有所不同。以图5中的
V r2(位于100扇区)为例:第一个有效矢量V6(110)
的占空比k6为?y,第二个有效矢量为V2(010)的
占空比k2为?z;零矢量V0(000)和V7(111)的
占空比为
07
1()()
2
z y
k k
????
==。故A相占空比为
A67
1
22
y z
k k k
?+
=+=+(19)
调制函数的值为
A
f y zα
=?+=(20)
第23卷第2期
陆海峰等 基于调制函数的SVPWM 算法 41
这里f A 的几何意义可理解为图5中的
OJ
OK
,A k 的几何意义则为DK DJ ,其中J 、K 、D 分别是从V r2、
V 6、V 2向α 轴所作垂线的垂足。
采用同样方法,可以推导出B 、C 相的调制函数。以扇区101
为例,ABC 三相的调制函数为
A
B C
12
3 212
f V f V f α
β=?
? (21) 得益于前述对参考电压矢量的预处理,使得式(21)中关于V α、V β的系数均为常数,因此可将其事先存储在表格中。实时运算时,完全可以跳过4.1节中的内容,在扇区判断之后直接通过式(21)计算调制函数,从而得到每相的占空比和DSP 中定时器的寄存器配置值。这样,本文算法相对以文献[8]为代表的先得到t I 、t II ,
然后再查表计算寄存器配置的传统做法又有了显著的简化。
顺便提及,式(21)中的系数,第010、101扇区相同,001、110扇区相同,011、100扇区相同,所以表格中存储3组数据运算较为简便,兼顾了计算时间和存储空间上的要求。 4.3 饱和处理
当给定调制比较大,以至于参考电压矢量超出六边形内切圆出现饱和现象时,必须作相应处理。文献[8-9]中当I II t t +>1时,则令
pwm I Isat I II pwm II IIsat I II 22t t t t t t t t t t ?=
?+?
?
?=?+?
(22) 而采用本文算法,对饱和现象无需特意处理,只需要对调制函数或ABC 三相的占空比作简单限幅即可。即令
?1≤f A ≤1或0≤k A ≤1(二者等价) (23) 从而以简单的限幅操作取代了传统算法中耗时的除法运算,大大减少了计算时间。
5 仿真分析
为了验证上述算法的有效性,对本文算法和传统SVPWM 算法进行仿真对比,部分仿真波形如图6、图7所示。其中,图6是不同调制比下两种算法
的等效调制波波形的比较,图7则是对应的相电压波形的比较。
(a )传统SVPWM 算法下的调制波形
(b )本文算法下的调制波形
图6 两种算法下不同调制比时的调制波形比较 Fig. 6 Comparison of modulation waveforms at different
modulation indexes
(a )传统SVPWM 算法下的相电压波形
(b )本文算法下的相电压波形
图7 两种算法下不同调制比时的相电压波形比较
Fig.7 Comparison of phase voltage waveforms at
different modulation indexes
42
电 工 技 术 学 报 2008年2月
从图中可以看出,当m ≤1.1547时,两种算法产生的调制波形完全相同,均为鞍形波,相应的相电压波形也为无失真的正弦波形。
当1.1547<m ≤1.3333时,两种算法的等效调制波超出±1.0的部分将被削平并逐渐过渡到梯形波,相电压波形也出现轻微畸变,但两种算法仍无实质差别。
当m >1.3333时,普通算法波形不随m 的增大而变化;而从图6b 可以看出,本文算法的调制波虽然仍为梯形波,但却随着m 的增加而展宽,相应地,图7b 中的相电压波形出现阶梯。当m →∞时,调制波将趋近方波,相电压波形也趋近六阶梯波。
为对比两种算法下输出基波电压的能力,定义
1
dc
0.5u V η=
(24) 这里1u 为相电压输出波形中基波分量的幅值。显然,在线性调制区,有m =η。不同调制比下η的变化见表1(数值仿真中存在误差)。
表1 两种算法基波电压输出能力对比 Tab.1 Fundamental component of two methods
m
文 献 方 法
本 文 方 法
1.0 0.9999 0.9999 1.1547 1.1546 1.1546 1.3333 1.2112 1.2178 3.0 1.2112
1.2625
可见,本文方法在简化计算的同时,在非线性调制区还提高了电压的利用率。
6 实验结果
为进一步验证算法的可行性,在样机系统中进行了变压变频(VVVF )的空载实验。试验电机为笼型异步电动机,额定参数为P N =4kW ,U N =220V ,I N =15.1A ;PWM 周期200μs ,死区时间5μs ;实验中直流母线电压88V 。
图8~图10为不同调制比下A 相的调制波形和电流波形,其调制比分别为1.1547、1.3333和2.0。可见,当m =1.1547时为线性调制,随着m 的增大逐渐过渡到过调制区,当调制比为2.0时已进入过调制的第二阶段[12]。
图8 调制比为1.1547, 基波频率28.87Hz 时的实验波形
Fig.8 Experimental
results when m =1.1547
图9 调制比为1.3333, 基波频率33.33Hz 时的实验波形
Fig.9 Experimental results when m =1.3333
图10 调制比为2, 基波频率50Hz 时的实验波形,
Fig. 10 Experimental results when m =2.0
7 结论
为了满足SVPWM 算法的实时性要求,基于载波比较的思想,提出了一种直接计算调制函数的实
第23卷第2期陆海峰等基于调制函数的SVPWM算法 43
用SVPWM算法。理论分析和仿真、实验结果表明,相对现有的各种算法,该算法具有如下特点:(1)计算简便。算法过程中无需计算三角函数和开方运算;饱和处理无需除法运算;省略部分查表和计算步骤。
(2)在线性调制区与普通SVPWM算法性能一致,在过调制区具有更高的基波电压输出能力,即更高的直流电压利用率。
参考文献
[1] 王晶晶,徐国卿,王麾.基于DSP的两种SVPWM
技术实现方案研究[J].电工技术杂志,2003, 22 (1):
39-42.
Wang J J, Xu G Q, Wang H. Study and realization of
two different SVPWM technique with DSP[J]. Electr-
otechnical Journal, 2003, 22(1): 39-42.
[2] Lai Y S, Bowes S R. Optimal bus-clamped PWM
techniques for three-phase motor drives[C]. IECON
2004, Busan, 2004, 2: 1475-1480.
[3] 周卫平,吴正国,唐劲松, 等.SVPWM的等效算法
及SVPWM与SPWM的本质联系[J].中国电机工程
学报,2006,26(2):133-137.
Zhou W P, Wu Z G, Tang J S, et al. A novel algorithm
of SVPWM and the study on the essential relationship
between SVPWM and SPWM[J]. Proceedings of the
CSEE, 2006, 26(2): 133-137.
[4] 浦志勇,黄立培,吴学智.三相PWM整流器空间
矢量控制简化算法的研究[J].电工电能新技术,
2002,21(2):56-60.
Pu Z Y, Huang L P, Wu X Z. Research on simplified
algorithm of the three-phase PWM rectifier with space
vector control[J]. Advanced Technology of Electrical
Engineering and Energy, 2002, 21(2): 56-60.
[5] 熊健,康勇,张凯,等.电压空间矢量调制与常规
SPWM的比较研究[J].电力电子技术,1999(1):
25-28.
Xiong J, Kang Y, Zhang K, et al. Comparison study of
voltage space vector PWM and conventional
SPWM[J]. Power Electronics, 1999(1): 25-28.
[6] Van der Broeck H W, Skudelny H C, Stanke G V.
Analysis and realization of a pulsewidth modulator
based on voltage space vectors[J]. IEEE Transactions
on Industry Applications, 1988, 24(1): 142-150.
[7] Hava A M, Kerkman R J, Lipo T A. Simple analytical
and graphical methods for carrier-based PWM-VSI
drives[J]. IEEE Transactions on Power Electronics,
1999, 14(1): 49-61.
[8] Implementation of a Speed Field Orientated Control of
Three Phase AC Induction Motor using TMS320F240
(BPRA076)[M]. Texas Instruments: TI Inc, 1998. [9] 马皓,郎芸萍.空间矢量简化算法在三相PWM电
压型整流器中的应用[J].浙江大学学报(工学版),
2006,40(1):176-180.
Ma H, Lang Y P. Application of simplified space-vector modulation algorithm to three-phase voltage source PWM rectifier[J]. Journal of Zhejiang
University (Engineering Science), 2006, 40(1): 176-
180.
[10] 杨贵杰,孙力,崔乃政,等.空间矢量脉宽调制方
法的研究[J].中国电机工程学报,2001,21(5):79-83.
Yang G J, Sun L, Cui N Z, et al. Study on method of
the space vector PWM[J]. Proceedings of the CSEE,
2001, 21(5): 79-83.
[11] Bose B K.Modern Power Electronics and AC Drives
[M].Beijing: China Machine Press,2003.
[12] Holtz J,Lotzkat W,Khambadkone A M. On
continuous control of PWM inverters in the overmodulation range including the six-step mode[J].
IEEE Transactions on Power Electronics, 1993, 8(4):
546-553.
作者简介
陆海峰男,1976年生,博士,助理研究员,主要研究方向为现代
电力电子变换技术与电机控制。
瞿文龙男,1946年生,教授,博士生导师,主要从事电力电子与
电机控制等领域的研究。
`