2机炉负荷协调控制系统要点
第二章机炉负荷协调控制系统
2.1任务
机组负荷协调控制系统的任务是使机组尽可能快地响应电网对该机组的负荷要求,同时,应能保证主汽压力尽量稳定,以保证机组的安全稳定运行。
2.2单元机组对象的动态特性:
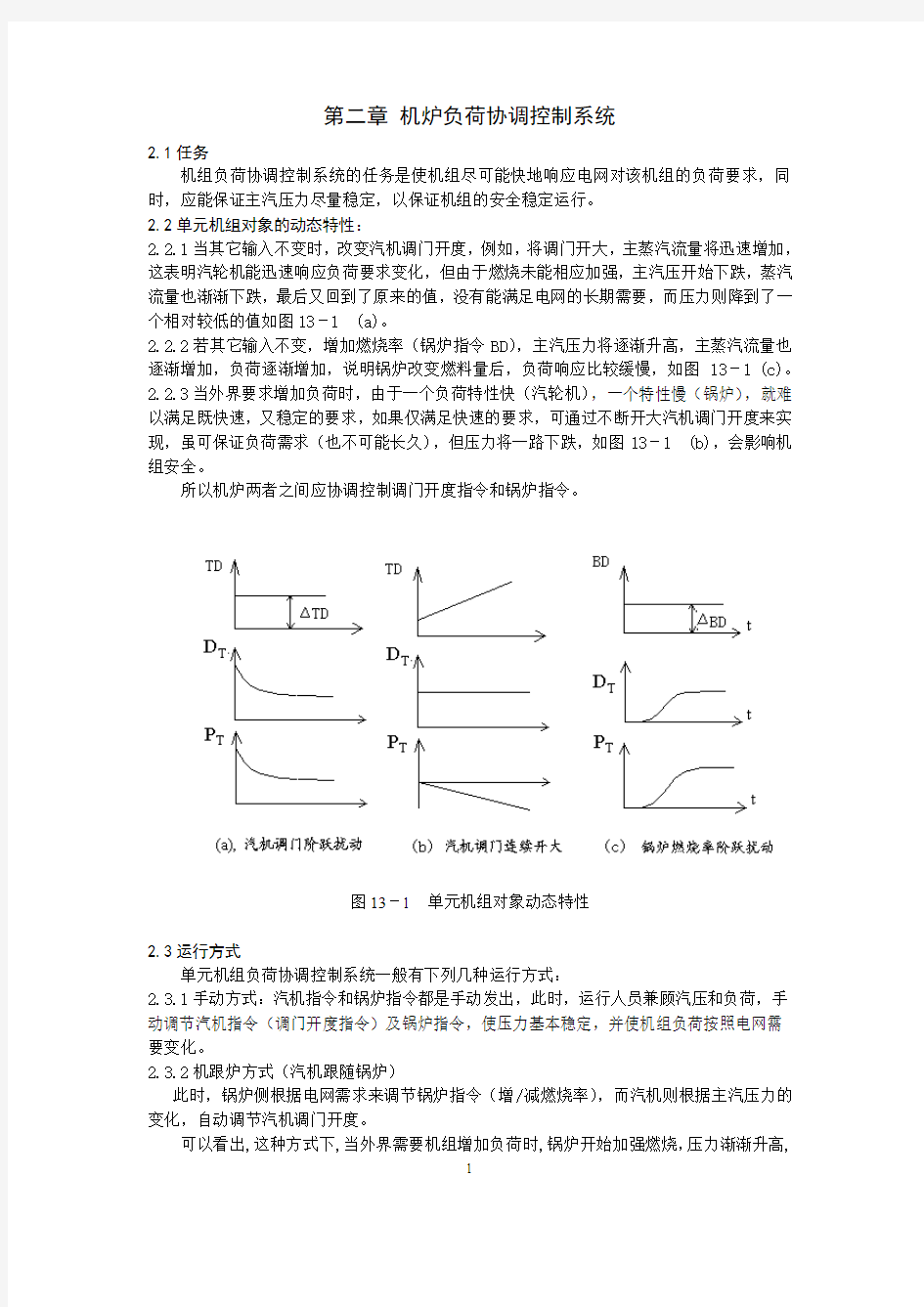
2.2.1当其它输入不变时,改变汽机调门开度,例如,将调门开大,主蒸汽流量将迅速增加,这表明汽轮机能迅速响应负荷要求变化,但由于燃烧未能相应加强,主汽压开始下跌,蒸汽流量也渐渐下跌,最后又回到了原来的值,没有能满足电网的长期需要,而压力则降到了一个相对较低的值如图13-1 (a)。
2.2.2若其它输入不变,增加燃烧率(锅炉指令BD),主汽压力将逐渐升高,主蒸汽流量也逐渐增加,负荷逐渐增加,说明锅炉改变燃料量后,负荷响应比较缓慢,如图 13-1 (c)。
2.2.3当外界要求增加负荷时,由于一个负荷特性快(汽轮机),一个特性慢(锅炉),就难以满足既快速,又稳定的要求,如果仅满足快速的要求,可通过不断开大汽机调门开度来实现,虽可保证负荷需求(也不可能长久),但压力将一路下跌,如图13-1 (b),会影响机组安全。
所以机炉两者之间应协调控制调门开度指令和锅炉指令。
图13-1 单元机组对象动态特性
2.3运行方式
单元机组负荷协调控制系统一般有下列几种运行方式:
2.3.1手动方式:汽机指令和锅炉指令都是手动发出,此时,运行人员兼顾汽压和负荷,手动调节汽机指令(调门开度指令)及锅炉指令,使压力基本稳定,并使机组负荷按照电网需要变化。
2.3.2机跟炉方式(汽机跟随锅炉)
此时,锅炉侧根据电网需求来调节锅炉指令(增/减燃烧率),而汽机则根据主汽压力的变化,自动调节汽机调门开度。
可以看出,这种方式下,当外界需要机组增加负荷时,锅炉开始加强燃烧,压力渐渐升高,
汽机则根据压力升高情况,自动地调整汽机指令,渐渐开大调门开度,负荷随之增加,由于锅炉响应较慢,所以使负荷增加得较慢,但是由于汽机调门变化对压力的影响较快,所以压力显得十分稳定。
该方式的特点是:压力稳定,但负荷响应慢。
2.3.3炉跟机方式(锅炉跟随汽机)
此时,汽机侧根据电网负荷需求来调节汽机调门开度,而锅炉则根据主汽压力的变化自动地调整燃烧。
当外界负荷需求增加时,汽机可以很快地升高机组的负荷,但压力将下降,由于锅炉惯性较大,它虽然根据压力变化进行调节,但压力难以很快补上来,可能导致压力下跌较多。
该方式的特点是:负荷响应快,但压力不稳定。
2.3.4协调控制方式
协调方式则是综合机跟炉和炉跟机方式的优点,尽可能地克服它们的缺点。协调方式下,机、炉主控都将处于自动方式,即机指令和炉指令都是自动调整的。
协调控制方案较多:例如
同时将外界负荷变化指令送达机侧和炉侧;
采用直接能量平衡信号(DEB);
进行压力限制;
采用各种前馈、微分环节,用以改善系统特性。
本节主要介绍的协调控制系统方案以及运行方式。
协调控制系统的运行方式也分为:
1.手动方式MANUAL,此时机主控、炉主控(燃料主控)都在手动。
2.机跟炉方式TF,特征是机主控自动、炉主控手动。
3.炉跟机方式BF,特征是炉主控自动、机主控手动。
4.协调控制方式CCS,特征是机、炉主控都自动。
2.4协调控制系统的构成
系统由三部分构成:
1.负荷指令的形成
2.压力定值的形成
3.机、炉主控制指令的形成
此外,还有一个功能全面的逻辑控制系统,用来实现方式切换和跟踪等功能。
2.4.1负荷指令的形成
1.正常情况下负荷指令的形成(CCS方式下)
指令的来源:
(1)运行人员手动给定。
(2)来自ADS(自动调度系统)。当投入AGC(自动发电控制)后,机组将由电网调度发出的负荷指令直接控制。
就本机组而言,机组主控站投自动意味着ADS投入。但是当下列任一信号出现时,机组主控站不能投自动:
汽机主控站在手动;
锅炉主控站在手动;
ADS故障或ADS不可用(例如来自调度系统的遥调信号质量坏、遥调信号不在正常范围等);
出现RD、RU、RB(在本节后面介绍);
机组负荷指令LDC OUT超过高限。
(3)一次调频信号。这是根据汽轮机的静态特性曲线生成的指令。
(a)(b)
图13-2 汽轮机静态特性
一般来说,当电网频率发生变化时,汽轮机的调速系统会自动根据电网频率的变化来改变阀门开度,从而使机组的负荷发生变化。该过程称为一次调频。例如,如图13-2(a),原来机组在N A,3000rpm,即A点运行,当转速升高(电网频率升高)时,如果DEH的速度反馈信号是插入的,则机组将按照静态特性参与一次调频,也就是说它将自动关小调门,降低供给电网的电量,从而缓解频率的升高,此时,工作点移到B点,负荷降为N B。也就是说,当汽轮机转速升高时,它将自动地按一定比例减小发出的功率。
尽管汽轮机按照其静态特性减小了功率,但此时转速仍高于3000rpm,电网频率仍偏高。若要进一步降低转速(使电网频率继续降低),电网调度可以要求网上的各机组(包括本机组)再适当降一点负荷。这属于二次调频。二次调频结束后,工作点处于C点,此时,负荷为N C,转速又回到3000rpm。
二次调频相当于平移了汽轮机的静态特性曲线,如图13-2(b)所示。。
为什么要在协调控制系统的负荷指令中,加入频差信号呢?
这是因为当投入CCS方式后,汽机功率PI控制器(见图13-8)将对负荷指令和实际MW进行PI运算,最终会使MW=负荷指令。
这说明,若负荷指令中不含频率信号,机组的实发MW将不受频率影响,即使DEH将速度反馈插入,也不起作用,也就是说,机组丧失了一次调频能力,这对于并于网上的机组来说,是不合适的。
如何插入频率信号?如图13-3所示,在机组主控站的输出上叠加了频差信号。这样,机组的负荷指令,不仅仅是运行人员给定的值或仅仅是ADS指令(ADS指令可以由运行人员偏置),它还包括频差信号成分。这个成分可能是零(相当于没有插入)也可能是按静态特性曲线折算出的负荷(即已插入)。若机组的速度不等率定为4%,则可折算:
52HZ对应―300MW
48HZ对应+300MW
所以,指令负荷的构成可用图13-3表示。
图13-3 机组负荷指令形成原理(一)
上述三种成分构成的负荷指令还不能直接用于CCS的负荷指令,它还要受到下列限制,参见图13-4。
图13-4 机组负荷指令形成原理(二)
(1)负荷变化速率限制x~y KW/min。速率可以由运行人员设定。
(2)负荷指令受到最大负荷、最小负荷的限制。
(3)当不在CCS方式时,机组负荷指令跟踪实发功率信号。
当出现异常情况时,例如当出现RD/RU/RB时,负荷指令按照事先规定好的RD/RU/RB 速率改变。例如,一台引风机跳闸引超RB时,负荷指令将以150MW/min 的速率降低。
2.异常情况下的负荷指令:
图13-5 RB/RD/RU指令
(1)RUN DOWN与RUN UP(迫降与迫升)
首先,谈一下闭锁增(BLOCK INCREAE)和闭锁减(BLOCK、DECREASE)的问题:
闭锁增,即不可再增大;闭锁减,则不可再减小;
当送风机的开度指令已达上限;或
给水泵控制指令已达上限;或
引风机指令已达上限;或
汽机阀指令已达上限时,则闭锁增。
当出现送风机指令已达下限;或
引风机指令已达下限;或
给水泵指令已达下限;或
给粉机指令已达下限;或
汽机阀位指令达下限时,则闭锁减。
再谈RD(RUN DOWN)与RU(RUN UP):
首先,在CCS方式下,在LDC画面上,按下RD/RU允许按钮,则表明可以实现RD/RU 功能。
①关于RD
在RD/RU允许的情况下,若已经出现BLOCK INC,当
a. 燃料量比其需求量要小(得多)
b. 送风量比其需求量要小(得多)
c. 给水量比其需求量要小(得多)
*d. 炉膛压力比其定值高(得多)
此时,将进入RD状态。进入RD后,将按照一定的速率开始减少LDC输出。
当上述偏差被缩小后,RD过程结束。
如图13-5,当出现RD时,LDC OUT将从原先的锅炉指令起,逐步向零变化(切换开关T算法可以设定变化速率),此时的锅炉指令将跟随LDC OUT变化(见图13-7 )。
当锅炉指令减小后,RD条件将在某个时刻消失,此后LDC OUT又回到正常情形。所以当RD导致LDC OUT从原先的锅炉指令逐步变小时,并不是一定要变到零。
②RU关于与RD意义相反
这里,有一个概念问题需要说明一下,在有些厂家的设计中,BLOCK INCREASE和BLOCK DECREASE并不是在某些指令达到上限或下限时才出现,而是在运行过程中当发现需求量(例如送风量需求)与实际过程变量(送风量)出现大的偏差时,为防止偏差进一步扩大,需求量将停止增加或减小,这是在行进的过程中停来下“等待”,而并非一定要等到执行机构的指令(例如送风机动叶指令)不能再升或降时才停下。而RD、RU则是在执行机构已达上限或下限时,若需求与设计过程变量仍然存在很大偏差时,才出现,而且,此时将通过降低“需求”,来缩写偏差。可见,这里的BI或BD是一种积极消除大偏差的行为,而RD、RU则是一种被动的行为,因为此时执行机构已无法再开大或关小,已不能通过增加或减小执行机构开度来消除大偏差,所以只能通过降低“需求”来减小偏差。我们认为,这样一种概念或提法是比较恰当的。
③关于RUN BACK快速降负荷(RB)
当机组在某个较高的负荷水平上运行时,若出现了重要辅机跳闸,机组就可能不能继续维持原来的负荷水平。此时,为了能使机组继续稳定运行,应该主动、快速降低负荷指令。
例如:原来在50%负荷以上运行,这时跳一台引风机,剩下的一台引风机最多只能维持50%负荷,所以负荷指令应迅速降低到50%。
下列情况导致RB:
跳一台空预器;
跳一台一次风机;
跳一台引风机;
跳一台送风机;
跳给水泵(三台泵中要有两台泵都停,而且要经适时延时);
汽轮发电机部分甩负荷
给粉机跳闸(一层或多层,图中未画出)。
要使系统具有RB功能,运行人员必须事先在CRT的LDC画面上按下“RB允许”按钮。何时结束RB?当锅炉指令已降到辅机允许的最大出力时,则自动结束RB。
2.4.2主汽压力设定值的形成
图13-6 主汽压力定值的形成
如图13-6,机组主汽压力可以由运行人员从燃料主控站(即锅炉主控站)上设定。
当要求机组以滑压运行方式运行时,压力定值将根据负荷指令“LDC OUT”自动设定。
如何选择滑压方式?
当在CCS方式,或在BF方式时,只要主汽压力与其设定值没有大的偏差,运行人员可从LDC画面上按下“选择滑压方式”按钮,则可进入滑压方式。不在CCS或BF方式,或在出现RD、RU、RB时,将退出滑压运行方式。
当按下“选择定压方式”按钮,则退出滑压运行方式,进入定压运行方式
无论是手动给定,还是根据“LDC OUT”给定,都要经过一个速率限制以及最大、最小限制。当在手动方式时或旁路打开时,压力定值将跟踪实际压力。
2.4.3机、炉控制指令的形成
1.锅炉指令
图13-7 锅炉主控指令的形成
当锅炉主控站在手动时,给粉机指令由运行人员手动调节(参见第十一节中燃料控制部分),给粉机指令的上级指令燃料指令FD 将跟踪热量信号HR (燃料量),而燃料指令的上级指令锅炉指令BD 则跟踪燃料指令FD 。
当锅炉主控投自动后,有两种情形:
A 、若汽机主控站在手动,则为BF 方式(炉跟机方式)
B 、若汽机在自动,则为CCS 方式(协调方式)
不管是上述哪种情形,此时,都由锅炉侧自动调节主汽压力,锅炉指令的形成原理如图13-7 所示。这里有两种做法。
a. 采用锅炉主汽压力控制器。将主汽压力测量值(三测量)与主汽压力设定值求偏差,在锅炉主汽压力控制器中进行PI 运算,其输出为锅炉指令BD ,主汽压力控制器最终使得主汽压力Pt 等于设定值P S 。
为了提高锅炉的负荷响应速度,改进压力调节品质,将机组的负荷指令用作锅炉指令的前馈信号,而且采用了一个超前环节。
b. 采用DEB 信号。要使汽压稳定,最好能做到锅炉的能量输入始终与锅炉的能量输出相平衡。锅炉的能量输出一般就是指汽机的能量输入,而汽机能量输入可以用汽机一级压力P 1来表示,所以可以考虑用P 1信号直接控制锅炉指令,但仅用P 1是不够的,它可能产生正反馈影响。例如,由于锅炉自身扰动,燃烧短暂加强,这会使Pt 上升,又会使P 1上升,按照上述设计,锅炉侧则理解为汽机所需要的能量增加了,这就会使锅炉指令再增加,结果使Pt 继续上升。所以这样的设计是不稳定的,应进行改进。
汽机的能量需求,应体现在对汽机阀门的开度变化上。在某一主汽压力Pt 下,调门开度越大,调节级压力P 1越大,或者说,调门开度与t
P P 1成比例。 在当前要求的主汽压力下,汽机的能量需求应为调门开度×主汽压力设定值,即
S t
P P P 1 。 锅炉应根据这个需求增加锅炉指令BD ,才能使锅炉的能量输入与输出能量相平衡,显然用这个信号具有直接和快速的优点。所以被称为直接能量平衡信号DEB 。
为了改善动态品质,所以采用了DEB 微分信号与DEB 叠加,最终成为锅炉指令BD 。这里没有了锅炉主汽压力控制器,压力还能维持在定值上吗?
从图13-7 可见,此时,锅炉指令BD 为dt
dDEB DEB DEB ?+,这个指令经交叉限制后,成为即燃料指令,与HR 求偏差后进行PI 运算,并输出给粉机指令(参见第十一节燃料控制系统)。
因此最终应有
HR dt
dDEB DEB DEB =+? 即,dt dP Cd P dt P P P d P P P d S t s t +?????
? ??+111)(1= 稳定时,微分输出为0,所以11P P P P s t
= 即,s t P P =。所以,即使没有PI 调节器的校正,也能使主汽压力最终与其设点值相等。 c. 在出现RD 、RU 、RB 时,锅炉指令BD 将按LDC OUT 变化。
2.汽机主控指令
汽机主控指令的形成原理如图13-8所式。
图13-8 汽机主控指令的形成原理
(1)当DEH不在遥控方式时,汽机主控不能投自动,此时汽机主控指令TD将跟踪DEH 的负荷基准LOAD REF。
运行人员可利用DEH操作画面或手动盘控制汽轮机调门开度,继而控制负荷和压力。
在DEH投遥控后,若机主控站处于手动方式,运行人员可以用机主控站上的增/减键改变汽机指令。
(2)当汽机主控站投自动时,又有两种情形:
A、锅炉主控在手动。此时为TF方式,汽机将自动维持主汽压力,主汽压力Pt与其设定值Ps求偏差,然后交给汽机主汽压力控制器运算,输出指令去汽机DEH,最终使Pt =Ps 。
B、若锅炉主控也投自动,此时为CCS方式,主汽压力将由锅炉主控去调,汽机侧将根据机组负荷及负荷指令调节。测量到的实际MW(双测量)与设定值(LDC OUT)求偏差,并由汽机功率(MW)控制器进行PI运算,其输出去控制汽机负荷基准,继而改变机组负荷,最终MW=LDC OUT。
为了提高负荷响应速度,将LDC OUT用作汽机主控指令的前馈信号。
可以看出,,这里的CCS方式特点是机调功,炉调压,即CCS是建立在BF基础之上的。
尽管采用DEB可以改善压力调节品质,但若负荷需变化过大,或其它原因,仍有可能使主汽压波动较大,例如,在增负荷时,主汽压力会降低,若降得过多,则不利于机组安全运行,此时应该注意防止由于汽机指令进一步增加而导致压力进一步下降。
因此,用压力与其定值的偏差程度,去限制汽机指令的进一步变化,如图中f(x) ,它是一个带死区的函数发生器,它表示允许压力波动,但不能过大。
对于RU、RD、RB情形(此时仍在CCS方式,且只能在CCS方式),此时锅炉按LDC OUT调,LDC OUT将按照RD/RU/RB的要求变化,而汽机侧将维持主汽压力的稳定,此