青科大机电2014工硕课表
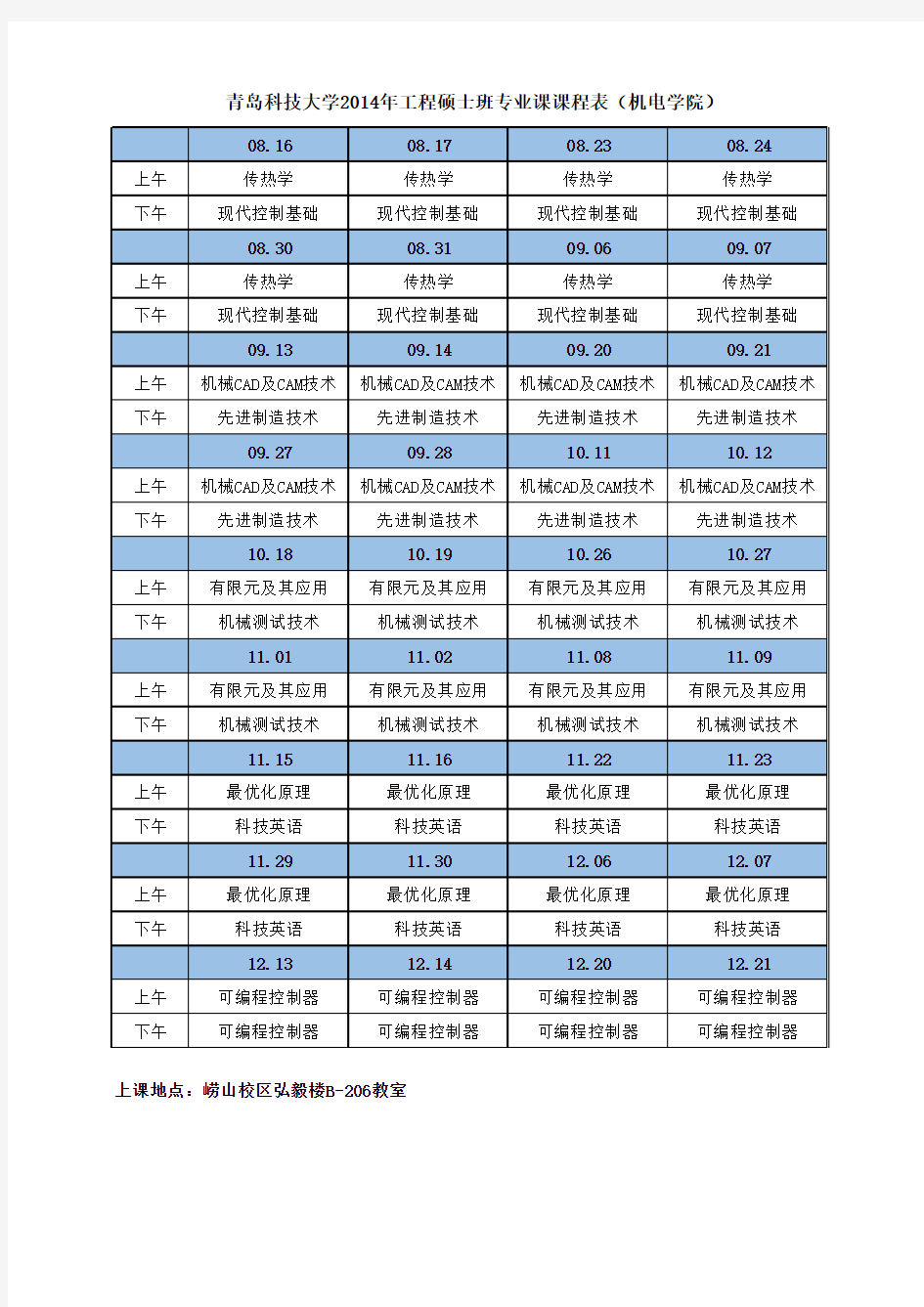
青岛科技大学2014年工程硕士班专业课课程表(机电学院)
08.1608.1708.2308.24
上午传热学传热学传热学传热学下午现代控制基础现代控制基础现代控制基础现代控制基础
08.3008.3109.0609.07
上午传热学传热学传热学传热学下午现代控制基础现代控制基础现代控制基础现代控制基础
09.1309.1409.2009.21
上午机械CAD及CAM技术机械CAD及CAM技术机械CAD及CAM技术机械CAD及CAM技术下午先进制造技术先进制造技术先进制造技术先进制造技术
09.2709.2810.1110.12
上午机械CAD及CAM技术机械CAD及CAM技术机械CAD及CAM技术机械CAD及CAM技术下午先进制造技术先进制造技术先进制造技术先进制造技术
10.1810.1910.2610.27
上午有限元及其应用有限元及其应用有限元及其应用有限元及其应用下午机械测试技术机械测试技术机械测试技术机械测试技术
11.0111.0211.0811.09
上午有限元及其应用有限元及其应用有限元及其应用有限元及其应用下午机械测试技术机械测试技术机械测试技术机械测试技术
11.1511.1611.2211.23
上午最优化原理最优化原理最优化原理最优化原理下午科技英语科技英语科技英语科技英语
11.2911.3012.0612.07
上午最优化原理最优化原理最优化原理最优化原理下午科技英语科技英语科技英语科技英语
12.1312.1412.2012.21
上午可编程控制器可编程控制器可编程控制器可编程控制器下午可编程控制器可编程控制器可编程控制器可编程控制器
上课地点:崂山校区弘毅楼B-206教室
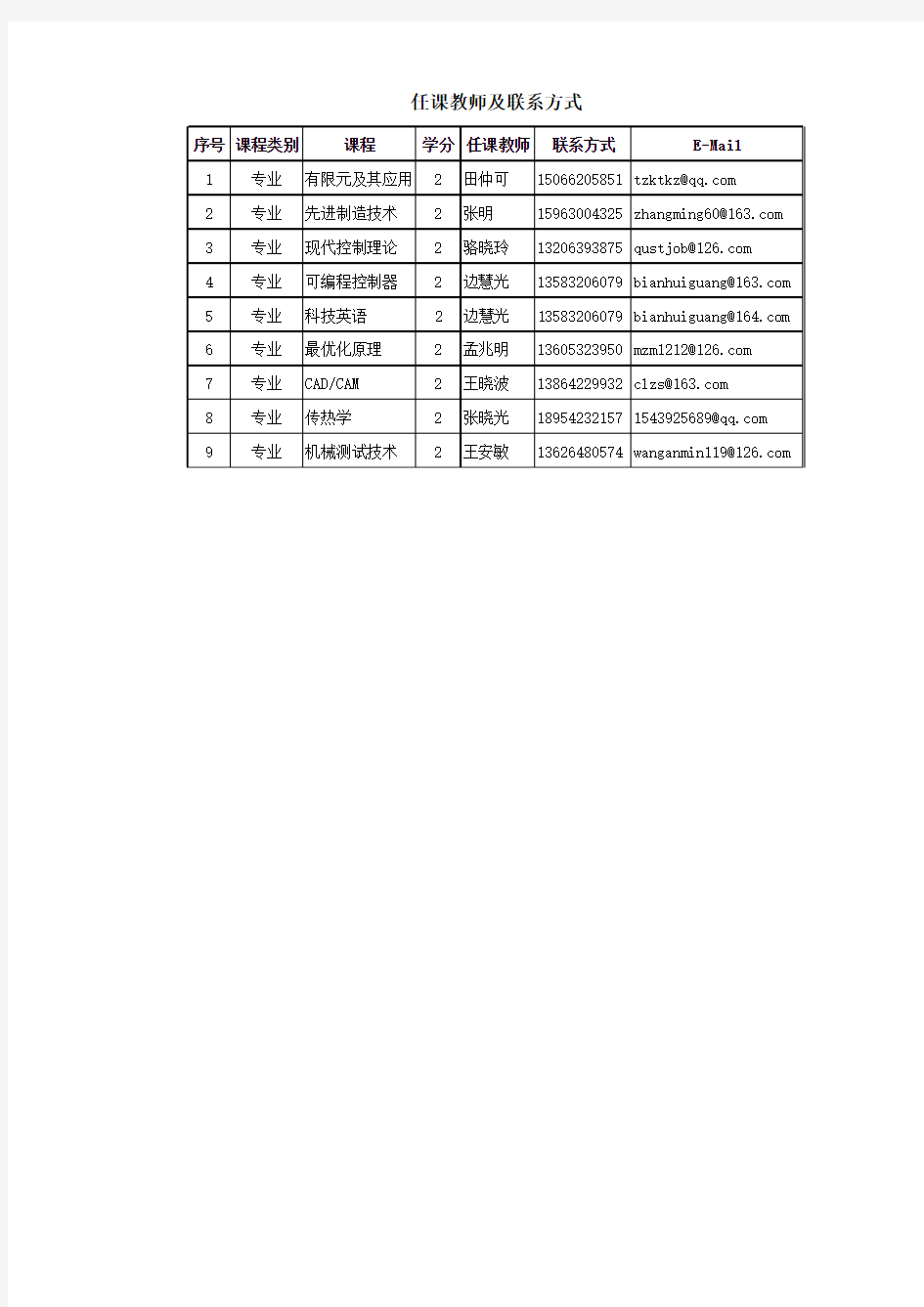
任课教师及联系方式
序号课程类别课程学分任课教师联系方式E-Mail
1专业有限元及其应用2田仲可150********tzktkz@https://www.360docs.net/doc/3512871633.html,
2专业先进制造技术2张明159********zhangming60@https://www.360docs.net/doc/3512871633.html, 3专业现代控制理论2骆晓玲132********qustjob@https://www.360docs.net/doc/3512871633.html,
4专业可编程控制器2边慧光135********bianhuiguang@https://www.360docs.net/doc/3512871633.html, 5专业科技英语2边慧光135********bianhuiguang@https://www.360docs.net/doc/3512871633.html, 6专业最优化原理2孟兆明136********mzm1212@https://www.360docs.net/doc/3512871633.html,
7专业CAD/CAM2王晓波138********clzs@https://www.360docs.net/doc/3512871633.html,
8专业传热学2张晓光189542321571543925689@https://www.360docs.net/doc/3512871633.html,
9专业机械测试技术2王安敏136********wanganmin119@https://www.360docs.net/doc/3512871633.html,
《机电传动控制与PLC技术》---实验教学大纲
《机电传动控制与PLC技术》课程实验教学大纲 课程名称 机电传动控制与PLC技术 课程学时 40 课程学分 2.5 课程属性 专业选修课 适用专业 自动化、电气工程及其自动化专业 课程性质 非独立设置的实验课程 先修课程 电机学、电机与拖动、工厂供电等 一、课程简介 本课程主要介绍常用控制电器的结构、原理、用途及型号 电气控制的基本线路 典型生产设 备电气控制系统 PLC的基本原理 三菱PLC的基本指令及顺序控制指令、功能指令 PLC的通信与 联网技术 PLC正确选用及PLC控制系统的简单设计。 二、课程实验目的 1、进行实验基本技能的训练 2、巩固、加深并扩大所学的基本理论知识 培养解决实际问题的能力 3、培养实事求是、严肃认真细致踏实的科学作风和良好的实验习惯 为将来从事生产和科学实验打 下必要的基础。 三、实验方式及基本要求 电气控制实验要求3-4人一组 按要求完成规定的实验项目 PLC实验要求单人单机实验 按要 求完成规定的实验项目。 要求能独立完成规定的实验项目 学会继电接触器控制线路的分析和设计方法 会观察实验现 象 会设计简单的控制险路 有解决简单控制线路故障的能力 掌握编程器、编程软件的使用 能 阅读和分析实际PLC程序与梯形图 能进行简单的程序设计 运行、调试、维护可编程序控制器系 统。 四、实验报告要求 实验报告是实验工作的全面总结 要用简明的形式将实验结果完整和真实的表达出来 报告要求简明扼要 字迹工整 分析合理。图表整齐清楚 线路图要用铅笔及绘图仪器绘制 不应徒手描 画。报告包括以下几项内容 1、实验名称、专业、班级、姓名、同组者名称、实验台号、实验日期、交报告日期。 2、实验目的 3、实验线路图 4、实验设备
机电传动控制
1. 引言 1.1 课程设计的目的: 电气控制系统是由各种低压电器和PLC 控制器按一定要求组成的控制系统。通过机电传动系统课程设计,进一步掌握各种低压电器和PLC 的结构原理、选用及使用;正确处理使用中出现的各种问题;了解器件和系统之间的关系;培养正确的设计思想、理论联系实际的工作作风、分析问题和解决问题的能力、运用标准与规范的能力、实事求是的科学态度和勇于探索的创新精神。 1.2 课程设计的内容及要实现的目标: 如图所示: 图1. 模型图 主要内容包括: 1. 设计出硬件系统的结构图、接线图、时序图等; 2. 系统有启动、停止功能; 3. 运用功能指令进行PLC 控制程序设计,并有主程序、子程序和中断程序; 4. 程序结构与控制功能自行设计; 5. 进行系统调试,实现机械手臂搬运加工流程的控制要求。 要实现的目标: 有两部机械对工作物进行加工,对象由输送带A 送到加工位置,然后由机械手将加工物送至工作台1的位置进行第一次加工,当第一步骤加工完成后,机械手臂将工作物夹
起送至工作台2进行第二步加工:当第二步骤加工完成后,机械手臂将工作物放到输送带B送走,然后由7段数码管显示加工完成的数量。 15 左移 ST4 14 上升 YA3 ST1 图2. 机械手工艺流程图 机械手工作前应位于原点,不同的位置分别装有行程开关。ST1为下限为开关,ST2为上限位开关,ST3为右极限位开关,ST3为左限位开关。 机械手的上、下、左、右移动以及工件的夹紧,均由电磁阀驱动气缸来实现。电磁阀YA1通电,机械手下降;电磁阀YA2通电,夹紧工件;电磁阀YA3通电,机械手上升;电磁阀YA4通电,电磁阀右移;电磁阀YA5通电,机械手左移。
华中科大机电传动控制(第五版)课后习题答案解析
华中科大机电传动控制(第五版)课后习题答案解析
2.7 如图所示,电动机轴上的转动惯量JM =2.5kg.m2,转速nM =900r/mim ;中间传动轴的转动惯量J1=2kg.m2,转速n1=300r/mim ;生产机械轴的惯量JL =16kg.m2,转速nL =60r/mim 。试求折算到电动机轴上的等效转动惯量。 答: j1=ωM/ω1= nM/n1=900/300=3 jL=ωM/ωL= nM/nL=900/60=15 )(8.21516 325.2222211m kg j J j J J J L L M Z ?=++=++= 2.8 如图所示,电动机转速nM =950r/mim ,齿轮减速箱的传动比J1= J2 =4,卷筒直径D =0.24m ,滑轮的减速比J3 =2,起重负荷力F =
100N ,电动机的飞轮转矩GDM2=1.05N.m ,齿轮、滑轮和卷筒总的传动效率为0.83。试求提升速度v 和折算到电动机轴上的静态转矩TL 以及折算到电动机轴上整个拖动系统的飞轮惯量GDZ2。 答: min) /(4.594 495021r j j n n M L =?== ) /(37.02 604 .5924.0603 s m j Dn v L =???= = ππ TL=9.55Fv/(η1nM)=9.55×100×0.37/(0.83×
950)=0.45N.m 2 2 22365M M Z n Fv GD GD +=δ 2 22 232.1~16.195037.010036505.1)25.1~1.1(m N GD Z ?=??+?= 3.3 一台他励直流电动机所拖动的负载转矩TL =常数,当电枢电压或电枢附加电阻改变时,能否改变其稳定运行状态下电枢电流的大小?为什么?这时拖动系统中哪些量必然要发生变化?
机电传动控制第三版课后答案
习题与思考题 第二章机电传动系统的动力学基础 2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。 拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。静态转矩就是由生产机械产生的负载转矩。动态转矩是拖动转矩减去静态转矩。 2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。 TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。 2.3 试列出以下几种情况下(见题2.3图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向) TM-TL>0说明系统处于加速。 TM-TL<0 说明系统处于减速 系统的运动状态是减速系统的运动状态是加速 系统的运动状态是减速系统的运动状态是匀速 2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则? 因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。这样,电动机与生产机械之间就得装设减速,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω2 2.5为什么低速轴转矩大,高速轴转矩小? 因为P= Tω,P不变ω越小T越大,ω越大T 越小。 2.6为什么机电传动系统中低速轴的GD2逼高速轴的GD2大得多? 因为P=Tω,T=G?D2/375. P=ωG?D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。 2.7 如图2.3(a)所示,电动机轴上的转动惯量J M=2.5kgm2, 转速n M=900r/min; 中间传动 轴的转动惯量J L=16kgm2,转速n L=60 r/min。试求折算到电动机轴上的等效专惯量。 折算到电动机轴上的等效转动惯量:j=Nm/N1=900/300=3,j1=Nm/Nl=15 J=JM+J1/j2+ JL/j12=2.5+2/9+16/225=2.79kgm2 . 2.8如图2.3(b)所示,电动机转速n M=950 r/min,齿轮减速箱的传动比J1= J2=4,卷筒直径D=0.24m,滑轮的减速比J3=2,起重负荷力 F=100N,电动机的费轮转距GD2M=1.05N m2, 齿轮,滑轮和卷筒总的传动效率为0.83。试球体胜速度v和折算到电动机轴上的静态转矩T L以及折算到电动机轴上整个拖动系统的飞轮惯量GD2z.。 ωM=3.14*2n/60=99.43 rad/s. 提升重物的轴上的角速度ω=ωM/j1j2j3=99.43/4*4*2=3.11rad/s v=ωD/2=0.24/2*3.11=0.373m/s T L=9.55FV/ηC n M=9.55*100*0.373/0.83*950=0.45NM GD2Z=δGD M2+ GD L2/j L2 =1.25*1.05+100*0.242/322 =1.318NM2 2.9 一般生产机械按其运动受阻力的性质来分可有哪几种类型的负载? 可分为1恒转矩型机械特性2离心式通风机型机械特性3直线型机械特性4恒功率型机械特性,4种类型的负载. 2.10反抗静态转矩与位能静态转矩有何区别,各有什么特点? 反抗转矩的方向与运动方向相反,,方向发生改变时,负载转矩的方向也会随着改变,因而他总是阻碍运动的.位能转矩的作用方向恒定,与运动方向无关,它在某方向阻碍运动,而在相反方向便促使运动。 2.11 在题2.11图中,曲线1和2分别为电动机和负载的机械特性,试判断哪些是系统的稳定平衡点?哪些不是?
平面磨床电气控制知识讲解
平面磨床电气控制
湖南工业大学 课程设计 资料袋 机械工程学院(系、部) 2012 ~ 2013 学年第二学期 课程名称机电控制技术课程设计指导教师吴吉平职称教授学生姓名陈谷专业班级机设1005 学号 10405700420 题目平面磨床的电气控制 成绩起止日期 2013 年 6 月 14 日~ 2013 年 6 月 23 日 目录清单
湖南工业大学 课程设计任务书 2012 —2013 学年第二学期 机械工程学院(系、部)机械设计制造及其自动化专业 5 班课程名称:机电控制技术课程设计 设计题目:平面磨床的电气控制 完成期限:自 2013 年 6 月 14 日至 2013 年 6 月 23 日共 1 周
指导教师(签字): 2013 年 6 月 14 日 系(教研室)主任(签字): 2013年 6 月 24 日
机床电气控制技术 设计说明书 平面磨床的电气控制 起止日期: 2013 年 6月 14 日至 2013年 6月 23 日 学生姓名陈谷 班级机设1005 学号10405700420 成绩 指导教师(签字) 机械工程学院 2013年 6月23日
目录 一、设计要求 0 二、电力拖动及控制要求 (1) 三、平面磨床电气控制电路 (3) 3.1主电路 (3) 3.2控制电路 (3) 3.3联锁、保护环节 (4) 3.4电磁吸盘控制电路 (5) 3.5照明电路与去磁器 (5) 四、平面磨床控制电路图及其解析 (6) 4.1选用控制线路的设计方法 (6) 4.2.继电器——接触器控制线路 (7) 五、电器元件的选用 (11) 5.1电气元件选择的原则 (11) 5.2按钮、组合开关的选用 (11) 5.3接触器的选用 (12) 5.4热继电器的选择 (12) 5.5熔断器的选择 (13) 5.6控制变压器的选择 (13) 六、可编程控制器PLC控制系统的设计 (16) 6.1控制线路的改造及PLC的选用 (16) 6.2PLC的外部接线 (17) 七、设计总结 (19) 参考文献 (20)
平面磨床电气控制
湖南工业大学 课程设计 资料袋 机械工程学院(系、部)2012 ~ 2013 学年第二学期课程名称机电控制技术课程设计指导教师吴吉平职称教授 学生姓名陈谷专业班级机设1005 学号10405700420 题目平面磨床的电气控制 成绩起止日期2013 年6 月14 日~2013 年 6 月23 日 目录清单
湖南工业大学 课程设计任务书 2012 —2013 学年第二学期 机械工程学院(系、部)机械设计制造及其自动化专业 5 班课程名称:机电控制技术课程设计 设计题目:平面磨床的电气控制 完成期限:自2013 年 6 月14 日至2013 年 6 月23 日共 1 周 指导教师(签字):2013 年 6 月14 日系(教研室)主任(签字):2013年 6 月24 日
机床电气控制技术 设计说明书 平面磨床的电气控制 起止日期:2013 年6月14 日至2013年6月23 日 学生姓名陈谷 班级机设1005 学号10405700420 成绩 指导教师(签字) 机械工程学院 2013年 6月23日
目录 一、设计要求 (1) 二、电力拖动及控制要求 (2) 三、平面磨床电气控制电路 (4) 3.1主电路 (4) 3.2控制电路 (4) 3.3联锁、保护环节 (5) 3.4电磁吸盘控制电路 (6) 3.5照明电路与去磁器 (6) 四、平面磨床控制电路图及其解析 (7) 4.1选用控制线路的设计方法 (7) 4.2.继电器——接触器控制线路 (8) 五、电器元件的选用 (11) 5.1电气元件选择的原则 (11) 5.2按钮、组合开关的选用 (11) 5.3接触器的选用 (12) 5.4热继电器的选择 (12) 5.5熔断器的选择 (13) 5.6控制变压器的选择 (13) 六、可编程控制器PLC控制系统的设计 (15) 6.1控制线路的改造及PLC的选用 (15) 6.2PLC的外部接线 (16) 七、设计总结 (18) 参考文献 (19)
华中科大机电传动控制(第五版)课后习题答案解析(DOC)
机电传动控制 冯清秀 邓星钟 等编著 第五版 课后习题答案详解 2.1 说明机电传动系统运动方程式中的拖动转矩、静态转矩和动态转矩的概念。 答:拖动转矩:电动机产生的转矩Tm 或负载转矩TL 与转速n 相同时,就是拖动转矩。 静态转矩:电动机轴上的负载转矩TL ,它不随系统加速或减速而变化。 动态转矩:系统加速或减速时,存在一个动态转矩Td ,它使系统的运动状态发生变化。 2.2 从运动方程式怎样看出系统是加速的、减速的、稳定的和静止的各种工作状态? dt d J T T L M ω =- 答:运动方程式: d L M T T T =- Td>0时:系统加速; Td=0 时:系统稳速;Td<0时,系统减速或反向加速 2.3 试列出以下几种情况下系统的运动方程式,并说明系统的运行状态是加速、减速还是匀速?(图中箭头方向表示转矩的实际作用方向)
答:a 匀速,b 减速,c 减速,d 加速,e 减速,f 匀速 2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则? 答:在多轴拖动系统情况下,为了列出这个系统运动方程,必须先把各传动部分的转矩和转动惯量或直线运动部分的质量都折算到电动机轴上。 由于负载转矩是静态转矩,所以可根据静态时功率守恒原则进行折算。 由于转动惯量和飞轮转矩与运动系统动能有关,所以可根据动能守恒原则进行折算。 2.5 为什么低速轴转矩大?调速轴转矩小? 答:忽略磨擦损失的情况下,传动系统的低速轴和调速轴传递的功率是一样的,即P1=P2 而P1=T1ω1,P2=T2ω2 所以T1ω1=T2ω2,当ω1>ω2时, T1<T2 2.6 为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多? 答:因为低速轴的转矩大,所设计的低速轴的直径及轴上的齿轮等零件尺寸大,质量也大,所以GD2大,而高速轴正好相反。 2.7 如图所示,电动机轴上的转动惯量JM =2.5kg.m2,转速nM =900r/mim ;中间传动轴的转动惯量J1=2kg.m2,转速n1=300r/mim ;生产机械轴的惯量JL =16kg.m2,转速nL =60r/mim 。试求折算到电动机轴上的等效转动惯量。 答: j1=ωM/ω1= nM/n1=900/300=3 jL=ωM/ωL= nM/nL=900/60=15 )(8.21516 325.2222211m kg j J j J J J L L M Z ?=++=++= 2.8 如图所示,电动机转速nM =950r/mim ,齿轮减速箱的传动比J1= J2 =4,卷筒直径D =0.24m ,滑轮的减速比J3 =2,起重负荷力F =100N ,电动机的飞轮转矩GDM2=1.05N.m ,齿轮、滑轮和卷筒总的传动效率为0.83。试求提升速度v 和折算到电动机轴上的静态转矩TL 以及折算到电动机轴上整个拖动系统的飞轮惯量GDZ2。
华中科大机电传动控制(第五版)课后习题答案解析
2.7 如图所示,电动机轴上的转动惯量JM =2.5kg.m2,转速nM =900r/mim ;中间传动轴的转动惯量J1=2kg.m2,转速n1=300r/mim ;生产机械轴的惯量JL =16kg.m2,转速nL =60r/mim 。试求折算到电动机轴上的等效转动惯量。 答: j1=ωM/ω1= nM/n1=900/300=3 jL=ωM/ωL= nM/nL=900/60=15 )(8.21516 325.2222211m kg j J j J J J L L M Z ?=++=++= 2.8 如图所示,电动机转速nM =950r/mim ,齿轮减速箱的传动比J1= J2 =4,卷筒直径D =0.24m ,滑轮的减速比J3 =2,起重负荷力F =100N ,电动机的飞轮转矩GDM2=1.05N.m ,齿轮、滑轮和卷筒总的传动效率为0.83。试求提升速度v 和折算到电动机轴上的静态转矩TL 以及折算到电动机轴上整个拖动系统的飞轮惯量GDZ2。
答: min) /(4.594 495021r j j n n M L =?== ) /(37.02 604 .5924.0603 s m j Dn v L =???= = ππ TL=9.55Fv/(η1nM)=9.55×100×0.37/(0.83×950)=0.45N.m 2 2 22365M M Z n Fv GD GD +=δ 2 22 232.1~16.195037.010036505.1)25.1~1.1(m N GD Z ?=??+?= 3.3 一台他励直流电动机所拖动的负载转矩TL =常数,当电枢电压或电枢附加电阻改变时,
华中科大机电传动控制第五版课后习题答案解析
2.7 如图所示,电动机轴上的转动惯量JM=,转速nM=900r/mim;中间传动轴的转动惯量J1=2kg.m2,转速n1=300r/mim;生产机械轴的惯量JL=16kg.m2,转速nL=60r/mim。试求折算到电动机轴上的等效转动惯量。 答:j1=ωM/ω1= nM/n1=900/300=3 jL=ωM/ωL= nM/nL=900/60=15 2.8 如图所示,电动机转速nM=950r/mim,齿轮减速箱的传动比J1= J2 =4,卷筒直径D =0.24m,滑轮的减速比J3 =2,起重负荷力F=100N,电动机的飞轮转矩GDM2=1.05N.m,齿轮、滑轮和卷筒总的传动效率为0.83。试求提升速度v和折算到电动机轴上的静态转矩TL以及折算到电动机轴上整个拖动系统的飞轮惯量GDZ2。 答: TL=9.55Fv/(η1nM)=9.55×100×0.37/(0.83×950)=0.45N.m 3.3 一台他励直流电动机所拖动的负载转矩TL=常数,当电枢电压或电枢附加电阻改变时,能否改变其稳定运行状态下电枢电流的大小?为什么?这时拖动系统中哪些量必然要发生变化? 答:因为 所以,当改变电枢电压或电枢串电阻时,Ia均不变。 由知 n会变化。 3.4一台他励直流电动机在稳定运行时,电枢反电势E=E1,如负载转矩TL=常数,外加电压和电枢电路中的电阻均不变,问减弱励磁使转速上升到新的稳定值后,电枢反电势将如何变化?是大于、小于还是等于E1? 答:因为 当Φ↓时,→Ia↑ 由U=E+IaRa,E=U-IaRa,当Ia ↑时,→E ↓,所以: E 机电传动控制第三版课后答案 【篇一:《机电传动控制》冯清秀版课后习题答案】 第二章 2.1答:运动方程式:tm?tl?j d?dt tm?tl?tdtd0时:系统加速; td=0 时:系统稳速;td0时,系统减速或反向加速 2.2 答:拖动转矩:电动机产生的转矩tm或负载转矩tl与转速n相同时,就是拖动转矩。 静态转矩:电动机轴上的负载转矩tl,它不随系统加速或减速而变化。 动态转矩:系统加速或减速时,存在一个动态转矩td,它使系统的运动状态发生变化。 2.3 答:a匀速,b减速,c减速,d加速,e减速,f匀速 2.4答:在多轴拖动系统情况下,为了列出这个系统运动方程,必须先把各传动部分的转矩和转动惯量或直线运动部分的质量都折算到电动机轴上。 由于负载转矩是静态转矩,所以可根据静态时功率守恒原则进行折算。 jz?jm? j1jl216??2.5??2?2.8(kg?m) 222j1jl315 nm950?dnl??0.24?59.4 ??59.4(r/min)v???0.37(m/s)j1j24?460j360?2 2 z 2m 2.8答:nl? fv2 gd??gd?2 nm 100?0.372 gd?(1.1~1.25)?1.05?365??1.16~1.32n?m2 2950 2 z 2.9答:恒转矩型、泵类、直线型、恒功率型。 2.10答:反抗性恒 转矩负载恒与运动方向相反。 位能性恒转矩负载作用方向恒定,与运动方向无关。2.11答:(d)不是稳定运动点,其余都是稳定运行点。 3.1答:转子在主磁通中旋转,要产生涡流和磁滞损耗,采用硅钢软 磁材料,可减少磁滞损耗,而采用“片”叠压成,可减少涡流损耗。 3.3答:因为 t?kt?ia?tl?常数所以,当改变电枢电压或电枢串电阻时,ia均不变。 n? 由 rau?t ke?kekt?2知 n会变化。 3.4答:因为 ↑时,→e ↓,所以: ee1 3.6 答: p1?inun? pn ?n in? pnun?n ? 7.5?1000 ?38.52(a) 220?0.885 p7.5 tn?n?9550??47.75(n?m) nn1550 3.8 答 : ?pn ra??0.50~0.75??1??ui nn??un ??i?n n0? ununnn ? Part1中文 [1] 巩云鹏、田万禄等主编. 机械设计课程设计 . 沈阳:东北大学出版社 2000 [2] 孙志礼,冷兴聚,魏严刚等主编. 机械设计. 沈阳:东北大学出版社 2000 [3] 刘鸿文主编. 材料力学. 北京:高等教育出版社1991 [4] 哈尔滨工业大学理论力学教研组编. 理论力学. 北京:高等教育出版社 1997 [5] 大连理工大学工程画教研室编. 机械制图. 北京:高等教育出版社 1993 [6] 孙桓,陈作模主编. 机械原理. 北京:高等教育出版社 2000 [7] 高泽远,王金主编. 机械设计基础课程设计.沈阳:东北工学院出版社 1987 [8] 喻子建,张磊、邵伟平、喻子建主编. 机械设计习题与解题分析.沈阳:东北大学出版 社 2000 [9] 张玉,刘平主编. 几何量公差与测量技术 .沈阳:东北大学出版社 1999 [10] 成大先主编.机械设计手册(减(变)速器.电机与电器)化学工业出版社 Part2中文 [1]《煤矿总工程师工作指南》编委会编著. 《矿总工程师工作指南》(上). 北京:煤炭工业出版社,1990.7 [2] 严万生等编著.《矿山固定机械手册》..北京:煤炭工业出版社,1986.5,第1版 [3]孙玉蓉等编著.《矿井提升设备》. 北京:煤炭工业出版社,1995.1,第1版 [4] 中国矿业学院主编. 《矿井提升设备》. 北京:煤炭工业出版社,1980.9,第1版 [5] 煤炭工业部制定.《煤矿安全规程》.煤炭工业出版社,1986,第1版 [6] 谢锡纯,李晓豁主编.《矿山机械与设备》.徐州:中国矿业大学出版社,2000 [7] 能源部制定.《煤矿安全规程》.北京:煤炭工业出版社,1992 [8] 王志勇等编.《煤矿专用设备设计计算》.北京:煤炭工业出版社,1984 [9] 彭兆行编.《矿山提升机械设计》.北京:机械工业出版社,1989 [10] 机械设计、机械设计基础课程设计,王昆等主编,北京:高等教育出版社,1996 [11] 机械设计手册/上册,《机械设计手册》联合编写组编,化学工业出版社,1979 [12] 画法几何及工程制图,中国纺织大学工程图学教研室等编,上海科学技术出版社,1984 [13] 机械零件设计手册(第二版)/中册,东北工学院《机械零件设计手册》编写组编,冶金工业出版社,1982 [14] 机械零件课程设计,郭奇亮等主编,贵州人民出版社,1982.1 [15] 机械设计标准应用手册/第二卷,汪恺主编,北京:机械工业出版社, 1997.8 [16] 矿山提升机械设计,潘英编,徐州:中国矿业大学出版社,2000.12 [17] 机械设计(第七版),濮良贵、纪名刚主编,北京:高等教育出版社, 2001 [18] 极限配合与测量技术基础,孔庆华、刘传绍主编,上海:同济大学出版社,2002.2 PART3英文 1、‘‘HOW CAN A BILL OF MATERIALS BE DE?NED SO THAT ALL POSSIBLE PRODUCTS CAN BE BUILT EF?CIENTLY?’’ ONE WAY T O ANSWER IT IS TO DE?NE A SET OF COMPONENTS (CALLED 精编华中科大机电传动控制(第五版)课后习 题答案解析资料1 机电传动控制 冯清秀邓星钟等编著 第五版课后习题答案详解 2.1 说明机电传动系统运动方程式中的拖动转矩、静态转矩和动态转矩的概念。 答:拖动转矩:电动机产生的转矩Tm 或负载转矩TL 与转速n 相同时,就是拖动转矩。静态转矩:电动机轴上的负载转矩TL ,它不随系统加速或减速而变化。 动态转矩:系统加速或减速时,存在一个动态转矩Td ,它使系统的运动状态发生变化。 2.2 从运动方程式怎样看出系统是加速的、减速的、稳定的和静止的各种工作状态? dt d J T T L M ω =- 答:运动方程式: d L M T T T =- Td>0时:系统加速;Td=0 时:系统稳速;Td2.3 试列出以下几种情况下系统的运动方程式,并说明系统的运行状态是加速、减速还是匀速?(图中箭头方向表示转矩的实际作用方向) 答:a 匀速,b 减速,c 减速,d 加速,e 减速,f 匀速 2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则? 答:在多轴拖动系统情况下,为了列出这个系统运动方程,必须先把各传动部分的转矩和转动惯量或直线运动部分的质量都折算到电动机轴上。 由于负载转矩是静态转矩,所以可根据静态时功率守恒原则进行折算。 由于转动惯量和飞轮转矩与运动系统动能有关,所以可根据动能守恒原则进行折算。 2.5 为什么低速轴转矩大?调速轴转矩小? 答:忽略磨擦损失的情况下,传动系统的低速轴和调速轴传递的功率是一样的,即P1=P2 而P1=T1ω1,P2=T2ω2 所以T1ω1=T2ω2,当ω1>ω2时,T1<T2 2.6 为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多? 2014秋季--素质教育课程1--学习操作指南 选课及课程学习总体流程如下: 选课及学习总体流程 1.进入学生工作室 进入西南科技大学网络教育学院网站https://www.360docs.net/doc/3512871633.html,,在页面左上角教学教务平台框中输入你的用户名(学号)和密码(默认身份证号码)以及验证码。 图1 2.在我的工作室中选择相应课程 在本学期课程列表中选择【素质教育课】并点击素质教育课后的“进入课程”,进入在线开放网络课程平台。 图2 3.进入在线开放网络课程平台学员工作室 学习步骤为“选课”—“互认”—“学习”。 单击进入“在线网络开放课程平台”选择第一课“羌族文化”,单击课程名进入课程。单击“选课”并“确认”。 确认选课后,课程变为“已选课”。单击右上角“我的选课”回到选课界面。此时课程“暂未互认”。 右上角单击“马上互认”,勾选“旅游出行指南”并“确认互认”,刷新页面即可进入课程学习。 4.课程学习 在选好课程后就可以开始课程学习了。在学生工作室中重新进入素质教育课程,在课程列表页中即可看到所选的课程。单击点击【进入学习】开始课程的学习,由于素质教育课基本上是视频课程,每讲视频大约为10-20分钟,需要你打开音箱或接入耳机学习。 5.完成在线测试 课程学习完成以后,你必须完成该课程测试。单击“在线练习”开始答题,所有的题目都是客观题,系统将自动判分,你还可以单击“查看练习结果”查看你的测试结果,如果成绩不理想,你还可单击“重做练习”再次测试。 图11 在线练习 图12 练习成绩及结果 请注意:素质教育课程的成绩是观看aa视频与在线联系各占50%,请同学们一定观看视频与做课后练习!! 羌族文化参考答案 1. 古羌人是古时中国主要居于______,从事______的族群。 A.北部,渔猎 B.南部,农耕 C.西部,游牧 D.东部,贸易 答案:C 标准答案:C 2. ______一部羌族英雄史诗,讲述了羌人祖先历经万险而最终从西北迁居至岷江上游地区的历 史。 A.《羌戈大战》 B.《木姐珠与斗安珠》 2014年1月洪恩教育班级教室排课表 时间教室 周六周日 8:00-10:00 10:00-12:00 2:00-4:00 4:00-6:00 6:00-7:30 8:00-10:00 10:00-12:00 2:00-4:00 4:00-6:00 6:00-7:30 教室1 H新1 Maggie (G6-10) H新二 Angela (G8-18) H新二 Angela (G7-15) H初二拔高 Linda (G8-9) H小升初2 Linda (G6-5) H新1 Angela (G7-12) 教室2 HG国少4 Lucy (3L-9) H3L Angela (G5-13) H初二拔高 Yoyo (G8-6) H中考冲刺 Maggie (G9-9) H初一拔高 Yoyo (G7-5) H小升初1 Angela (G6-8) H3L Maggie (G5-8) HG 国少1 Yoyo (3) 教室3 HG 国少2 Tanya (G3-10) HG国少2 Tanya (G4-11) HG国少1 (2013.9) Tanya (G1/2/3-13) HVIP Yoyo (权初二) H国少1 Tanya (G3-6) 2014年洪恩教育班级教室排课表 时间教室 周六周日 8:00-10:00 10:00-12:00 2:00-4:00 4:00-6:00 6:00-8:00 8:00-10:00 10:00-12:00 2:00-4:00 4:00-6:00 6:00-8:00 C1 初一yoyo H新1 Maggie (G6-10) H新二 Angela (G8-18) H新二 Angela (G7-15) 外教口语外教口语 H小升初2 Linda (G6-5) H新1 Angela (G7-12) 外教口语 C2 HG国少4 Lucy (3L-15) H3L Angela (G5-13) H初二拔 高 Yoyo (G8-6) H中考冲刺 Maggie (G9-9) H初一拔高 Yoyo (G7-5) H小升初1 Angela (G6-8) H3L Maggie (G5-8) HG 国少1 Yoyo (3) C3 HG国少2 Tanya (G3-10) HG国少2 Tanya (G4-11) HG国少1 (2013.9) Tanya (G1/2-7) H初二拔高 Linda (G8-9) H国少1 Tanya (G3-6) 《机电传动控制》考试总复习A卷 一、教材信息: 《机电传动控制》,邓星钟主编,华中科技大学出版社 二、考试题型 客观题(单项选择、判断题) 主观题(填空、分析与简答、计算) 三、总的复习题 一、选择题 1、电动机所产生的转矩在任何情况下,总是由轴上的负载转矩和_________之和所平衡。 ( D )A.静态转矩B.加速转矩C.减速转矩D.动态转矩 2、机电传动系统稳定工作时中如果T M>T L,电动机旋转方向与T M相同,转速将产生的变 化是。( B )A.减速B.加速 C.匀速D.停止 3、机电传动系统中如果T M 机电传动控制 冯清秀 邓星钟 等编着 第五版 课后习题答案详解 说明机电传动系统运动方程式中的拖动转矩、静态转矩和动态转矩的概念。 答:拖动转矩:电动机产生的转矩Tm 或负载转矩TL 与转速n 相同时,就是拖动转矩。 静态转矩:电动机轴上的负载转矩TL ,它不随系统加速或减速而变化。 动态转矩:系统加速或减速时,存在一个动态转矩Td ,它使系统的运动状态发生变化。 从运动方程式怎样看出系统是加速的、减速的、稳定的和静止的各种工作状态 dt d J T T L M ω=- 答:运动方程式: d L M T T T =- Td>0时:系统加速; Td=0 时:系统稳速;Td<0时,系统减速或反向加速 试列出以下几种情况下系统的运动方程式,并说明系统的运行状态是加速、减速还是匀速 (图中箭头方向表示转矩的实际作用方向) 答:a匀速,b减速,c减速,d加速,e减速,f匀速 多轴拖动系统为什么要折算成单轴拖动系统转矩折算为什么依据折算前后功率不变的原则转动惯量折算为什么依据折算前后动能不变的原则 答:在多轴拖动系统情况下,为了列出这个系统运动方程,必须先把各传动部分的转矩和转动惯量或直线运动部分的质量都折算到电动机轴上。 由于负载转矩是静态转矩,所以可根据静态时功率守恒原则进行折算。 由于转动惯量和飞轮转矩与运动系统动能有关,所以可根据动能守恒原则进行折算。为什么低速轴转矩大调速轴转矩小 答:忽略磨擦损失的情况下,传动系统的低速轴和调速轴传递的功率是一样的,即P1=P2而P1=T1ω1,P2=T2ω2 所以T1ω1=T2ω2,当ω1>ω2时, T1<T2 为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多 答:因为低速轴的转矩大,所设计的低速轴的直径及轴上的齿轮等零件尺寸大,质量也大,所以GD2大,而高速轴正好相反。 如图所示,电动机轴上的转动惯量JM=,转速nM=900r/mim;中间传动轴的转动惯量J1=,转速n1=300r/mim;生产机械轴的惯量JL=,转速nL=60r/mim。试求折算到电动机轴上的等效转动惯量。 实验一:机电控制系统与传动系统认知实验 实验目的:认识直流电机,交流电机,步进电机,伺服电机及对应的驱动器与变频器,认识可编程控制器,理解机电系统基本组成及控制原理 实验工具:电梯模型,柔性制造中心,机电装调实训台,三轴运动实训台,变频水泵系统。 实验内容:认识柔性制造单元:24V直流电机经过涡轮减速器减速后带动皮带传送装置,传送被加工件;电磁吸和装置、步进电机、直流电机与丝杠 及其他结构件构成了机械臂完成空间移动箱体的功能;直流电机、皮 带及槽轮机构完成放置箱体的功能;电机与气动装置配合完成给箱体 加盖与插销的功能;喷漆装置与加热装置完成喷漆与烘干功能;转盘 与摇臂装置完成传送物件的转弯功能;液压装置完成给箱体盖盖章功 能;光电传感器、霍尔传感器、颜色传感器完成质检功能;最后通过 伺服电机及丝杠传动完成合格品的入库功能;通过气动吸盘与三相异 步电动机将不合格产品抛弃。柔性制造系统共有13个单元及模块构 成,各个单元通过可编程控制器进行控制,各个控制器之间通过以太 网进行通信。 认识三轴运动实训系统:三轴运动实训系统通过步进电机与丝杠结构进 行运动控制,步进电机是可编程控制器通过控制步进电机驱动器进行 控制,利用此基本原理可实现3D打印,激光雕刻等功能。 认识电梯实训系统:电梯基本原理是通过可编程控制器控制三相异步交 流电动机带动钢丝绳实现电梯的上下运动,通过位置传感器、接触开 关来判断电梯位置,通过拉力传感器判断电梯是否过载,可编程控制 器通过采集电梯按键数据以控制电梯上下运动。 认识机电装调实验台:机电装调试验台是通过可编程控制器对材料进行 分拣,通过霍尔传感器判断材料是否金属,将金属材料分拣出来。 认识变频水泵系统:变频水泵系统通过压力传感器判断水位高低,通过 可编程控制器控制变频器控制三相交流异步电动机转动带动水泵以调 节水箱水位,使水箱保持恒定水位。 2.7 如图所示,电动机轴上的转动惯量JM =2.5kg.m2,转速nM=900r/mim ;中间传动轴的转动惯量J1=2kg.m2,转速n 1=300r/mim ;生产机械轴的惯量JL=16kg.m 2,转速nL=60r/mim 。试求折算到电动机轴上的等效转动惯量。 答: j1=ωM/ω1= nM/n1=900/300=3 jL=ωM/ωL= nM/nL=900/60=15 )(8.215 16 325.2222211m kg j J j J J J L L M Z ?=++=++= 2.8 如图所示,电动机转速nM=950r /m im,齿轮减速箱的传动比J1= J2 =4,卷筒直径 D=0.24m ,滑轮的减速比J3 =2,起重负荷力F=100N,电动机的飞轮转矩G DM 2=1.05N.m,齿轮、滑轮和卷筒总的传动效率为0.83。试求提升速度v和折算到电动机轴上的静态转矩TL 以及折算到电动机轴上整个拖动系统的飞轮惯量GDZ2。 答: min) /(4.594 495021 r j j n n M L =?== ) /(37.02 604 .5924.0603 s m j Dn v L =???= = ππ TL=9.55Fv/(η1nM )=9.55×100×0.37/(0.83×950)=0.45N .m 2 2 22365M M Z n Fv GD GD +=δ 2 22 232.1~16.195037.010036505.1)25.1~1.1(m N GD Z ?=??+?= 3.3 一台他励直流电动机所拖动的负载转矩T L=常数,当电枢电压或电枢附加电阻改变 如对您有帮助,请购买打赏,谢谢您! 习题与思考题 第二章机电传动系统的动力学基础 2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。 拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。静态转矩就是由 生产机械产生的负载转矩。动态转矩是拖动转矩减去静态转矩。 2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。 TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即 静态)的工作状态。 2.3 试列出以下几种情况下(见题2.3图)系统的运动方程式,并说明系统的运动状态是加 速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向) TM TL TM TL N TM=TL TM< TL TM-TL>0说明系统处于加速。 TM-TL<0 说明系统处于减速 TM TL TM TL TM> TL TM> TL 系统的运动状态是减速系统的运动状态是加速 TM TL TM TL TM= TL TM= TL 系统的运动状态是减速系统的运动状态是匀速 2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变 的原则?转动惯量折算为什么依据折算前后动能不变的原则? 因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。这样,电动机与生 产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。所以为了列出 系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴 上。转矩折算前后功率不变的原则是P=Tω, p不变。转动惯量折算前后动能不变原则是能 量守恒MV=0.5Jω2 2.5为什么低速轴转矩大,高速轴转矩小? 因为P= Tω,P不变ω越小T越大,ω越大T 越小。 2.6为什么机电传动系统中低速轴的GD2逼高速轴的GD2大得多? 因为P=Tω,T=G?D2/375. P=ωG?D2/375. ,P不变转速越小GD2越大,转速越大GD2 越小。 2.7 如图2.3(a)所示,电动机轴上的转动惯量J M=2.5kgm2, 转速n M=900r/min; 中间传动 轴的转动惯量J L=16kgm2,转速n L=60 r/min。试求折算到电动机轴上的等效专惯量。 折算到电动机轴上的等效转动惯量:j=Nm/N1=900/300=3,j1=Nm/Nl=15 J=JM+J1/j2+ JL/j12=2.5+2/9+16/225=2.79kgm2 .2.8如图2.3(b)所示,电动机转速n M=950 r/min,齿轮减速箱的传动比J1= J2=4,卷筒直径D=0.24m,滑轮的减速比J3=2,起重负荷力F=100N,电动机的费轮转距GD2M=1.05N m2, 齿轮,滑轮和卷筒总的传动效率为0.83。试球体胜速度v和折算到电动机轴上的静 态转矩T L以及折算到电动机轴上整个拖动系统的飞轮惯量GD2z.。 ωM=3.14*2n/60=99.43 rad/s. 提升重物的轴上的角速度ω=ωM/j1j2j3=99.43/4*4*2=3.11rad/s v=ωD/2=0.24/2*3.11=0.373m/s T L=9.55FV/ηC n M=9.55*100*0.373/0.83*950=0.45NM机电传动控制第三版课后答案
机械毕业设计参考文献(大全)
精编华中科大机电传动控制(第五版)课后习题答案解析资料1.doc
2014秋季--素质教育课程
2014教室时间课表1(修改)
华中科技大学-机电传动控制
华中科大机电传动控制(第五版)课后习题答案解析(DOC)
机电传动控制实验报告
华中科大机电传动控制(第五版)课后习题标准答案解析
机电传动控制第三版课后答案