振动力学试验
SINOCERA?
YE6251振动力学实验系统
实
验
指
导
书
(参考)
江苏联能电子技术有限公司
一、软件安装
运行光盘中YE6251控制软件目录中的setup.exe即可完成控制软件的安装。
用USB接口线连接计算机的USB口与调理器的USB口,打开调理器电源,这时计算机会提示找到新设备,并需要安装驱动程序,这时请指定驱动程序的安装路径为上面安装程序的目录下的 AQU采集器驱动\Win98(或Win2k或WinXP)
二、软件操作
1、登录输入
2、试验项目选择
选择当前的试验项目,包括系统名称、试验项目名称。下面以“简支梁系统”,用“冲击激励法测量模态参数”以例说明具体使用过程。
选择试验项目后,系统会自动显示本实验的实验向导,这样实验时可按照上面的实验向导的
步骤进行实验。
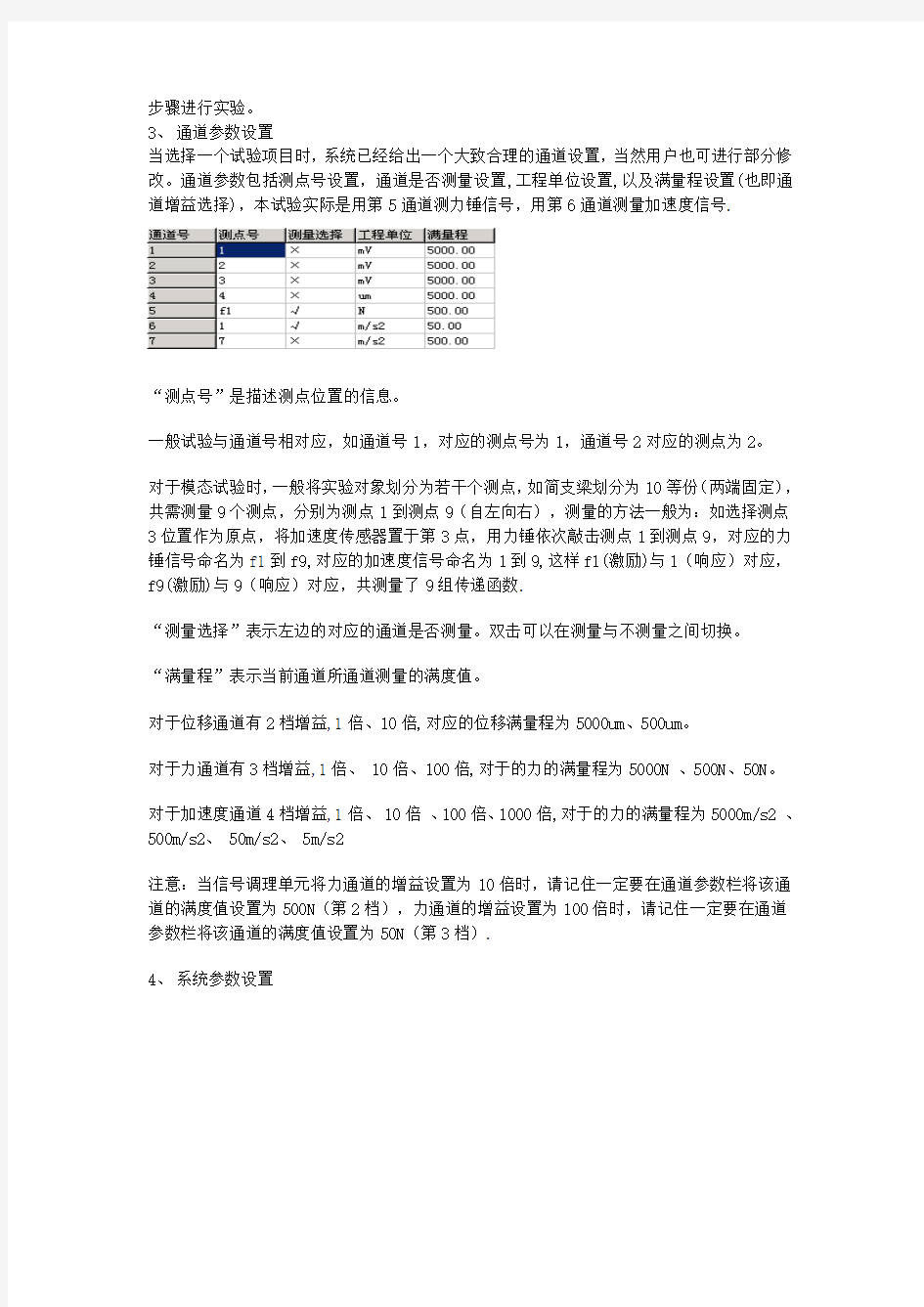
3、通道参数设置
当选择一个试验项目时,系统已经给出一个大致合理的通道设置,当然用户也可进行部分修改。通道参数包括测点号设置,通道是否测量设置,工程单位设置,以及满量程设置(也即通道增益选择),本试验实际是用第5通道测力锤信号,用第6通道测量加速度信号.
“测点号”是描述测点位置的信息。
一般试验与通道号相对应,如通道号1,对应的测点号为1,通道号2对应的测点为2。
对于模态试验时,一般将实验对象划分为若干个测点,如简支梁划分为10等份(两端固定),共需测量9个测点,分别为测点1到测点9(自左向右),测量的方法一般为:如选择测点3位置作为原点,将加速度传感器置于第3点,用力锤依次敲击测点1到测点9,对应的力锤信号命名为f1到f9,对应的加速度信号命名为1到9,这样f1(激励)与1(响应)对应,f9(激励)与9(响应)对应,共测量了9组传递函数.
“测量选择”表示左边的对应的通道是否测量。双击可以在测量与不测量之间切换。
“满量程”表示当前通道所通道测量的满度值。
对于位移通道有2档增益,1倍、10倍,对应的位移满量程为5000um、500um。
对于力通道有3档增益,1倍、 10倍、100倍,对于的力的满量程为5000N 、500N、50N。
对于加速度通道4档增益,1倍、 10倍、100倍、1000倍,对于的力的满量程为5000m/s2 、500m/s2、 50m/s2、 5m/s2
注意:当信号调理单元将力通道的增益设置为10倍时,请记住一定要在通道参数栏将该通道的满度值设置为500N(第2档),力通道的增益设置为100倍时,请记住一定要在通道参数栏将该通道的满度值设置为50N(第3档).
4、系统参数设置
采样方式:包括"示波"、"随机采样"、"信号触发"和"连续记录"和"模态试验"五种方式。采样块数:采集的数据长度,每块长度为1024点。
触发参数: 触发通道监测的通道
触发极性分为上升沿、下降沿和绝对值触发
触发电平触发的门槛值
触发延迟该参数设置为负数,表示是从触发点向前预保留的点数.
触发次数多次触发采集允许在一个测试项目中连续多次捕捉瞬态信号,在每次触发条件满足后,系统自动采集一段数据,随后即进入等待触发状态,等待捕捉下一个瞬态信号;如此反复,直到采集完指定的触发次数或用户强制终止采集。其取值范围是正整数。
采样批次: 采样批次仅用于模态分析时使用的一个参数,该参数用于测量通道个数少于模态分析的测点数,而需要进行分批多次测量的情况下,用来标志每批数据。亦可在事后分析时使用。其取值范围是正整数。
5、观察视图设置
选择工具栏的“时间波形”可以创建时间波形视图。
也可以设置其它类型的分析视图,如FFT分析、传递函数分析、统计分析等。
6、数据采集
采集前一般先选择“示波”,进行正式试验前测量系统的调试,如果显示异常,可以通过改变调理器参数进行调节.
使用指定的方式采集所需要的数据.
7、模态分析和振型动画显示(模态试验时使用)
(1)打开试验项目,选择试验数据所在的目录。
(2)调入某测点的时域波形,并对力锤信号加力窗,对响应信号加指数窗。
(3)计算某点的传递函数,并将上面的窗函数的参数应用于所有的测点。
(4)对于模态定阶,可以选择某点的传函来定阶,也可以将所有的传函集总平均后定阶。
(5)收取模态的方式可以选择“自动”和“手动”,选择“自动”时,对于某一固定的结构,模态参数基本固定,这时系统自动选择频率区域,选择“手动”时,可以手动选择频率区域。
(6)计算模态参数选择好频率区域后,选择“保存模态结果”,系统会自动计算模态频率,阻尼,和振型。
(7)振型和动画显示
(8)生成WORD报告可以自动当前试验的试验报告.
三、实验指导书
1-1自由振动法测量单自由度系统的参数
框图:
目的:测量系统自由振动的衰减曲线,并对曲线进行时域分析,确定其振动频率、周期、固
有频率、衰减系数、相对阻尼系数等参数.
步骤:
1、在单自由度系统的侧臂安装一个“测量平面”,用电涡流传感器对准该平面拾取振动信
号。
2、在不加阻尼的情况下在不加阻尼的情况下,用手轻推质量块,或用力锤轻敲质量块,采
集一段信号进行分析。
3、在加阻尼的情况下,用手轻推质量块,或用力锤轻敲质量块,采集一段信号进行分析。
4、根据图形计算振动频率、周期、固有频率、衰减系数、相对阻尼系数等参数,计算周期时,
为准确起见,可以多算几个周期进行平均
1-2用冲击激励法测量系统的频率响应函数
框图
目的:用冲击激励法测量系统的频率响应函数,并识别出其固有频率和阻尼系数。
步骤:
1、在单自由度系统的侧臂安装一个“测量平面”,用电涡流传感器对准该平面拾取振动信号。
2、将力锤信号接入力测量仪,用力锤轻敲质量块,采集一段信号进行分析。
1-3用稳态激扰法测量单自由度系统的频率响应函数
框图
目的:用稳态激扰法测量系统强迫振动的幅频、并确定其固有频率和阻尼系数(半功率点法)。步骤:
1、用激振器对准单自由度系统的质量块,对质量块进行激振。激振头装上阻抗头,阻抗头中有一力传感器和一加速度传感器,分别接入力测量仪和加速度测量仪。
2、信号源调节为正弦激励,当调节信号源频率f时,如维持力的大小保持不变F=1N-1.5N
(通道调节信号源的幅度),记录频率f与加速度a的数值,填表入下面的表格.
注意在谐振点附近时(约37Hz),频率的变化率应尽可能小,这样可以找准谐振点和比较准确计算阻尼.
3、调节阻尼大小,重做上面试验,观察阻尼的变化.
1-4用正弦扫频法测量单自由度系统的频率响应函数
框图
目的:用正弦扫频法测量系统的频率响应函数,并识别出其固有频率和阻尼系数。
步骤:
1、用激振器对准单自由度系统的质量块,对质量块进行激振。激振头装上阻抗头,阻
抗头中有一力传感器和一加速度传感器,分别接入力测量仪和加速度测量仪。
2、将信号源设置为扫频信号,频率范围可设置为10Hz-60Hz.扫频速度应与
采样的长度配合,如扫频速度较慢,应增加采样长度,扫频速度较快时,可以减小采样长度.
1-5动力吸振试验
框图
目的:动力吸振器减振实验。
步骤:
1 将附加质量安装于质量块2(质量块2固定),用手拨动附加质量,用电涡流传感器对着附加质量,测量附加质量组成系统的固的频率,并调节附加质量块杆的长度使其与质量块1的固有频率一致。
2 用激振器对质量块1进行激振,调节信号源的频率,当调到质量块1的固有频率时,质量1的振动的振动幅度很大,可用电涡流传感器测量幅度的大小。
3 将附加质量块固定于质量块1,用激振器对质量块1进行激振,调节信号源的频率,当调到质量块1的固有频率时,质量1的振动全部为附加质量吸收。用手可以感觉到这种变化,也可用电涡流传感器测量质量块1在加附加质量后振动幅度的大小,比较添加附加质量前后质量1振幅的变化。
2-1测量两自由度系统自由衰减曲线
框图
目的:分别测量两质量M1 、M2 自由振动的衰减曲线,并对信号进行频域分析,确定出其1~2阶固有频率和阻尼系数。
步骤:
1 用电涡流传感器测量质量块1,加速度传感器测量质量2的自由衰减曲线,可以用信号触发的方式,用手轻推质量块1,采集指定长的数据。
2 根据采集的数据,分析系统的1 - 2阶固有频率和阻尼系数。
. 2-2用冲击激励法测量两自由度系统的频率响应
框图:
目的:用冲击激励法测量系统的频率响应函数.
步骤: 以力通道为触发通道,用力锤(选用橡胶头)轻击第2个质量块,采集2K的数据进行分析。
2-3 用稳态激扰法测量两自由度的频率响应
框图:
目的:用稳态激扰法测量系统强迫振动的幅频、并确定其1~2阶固有频率、阻尼系数(半功率点法)
步骤:1、用激振器对准双自由度系统的质量块,对质量块进行激振。激振头装上阻抗头,阻抗头中有一力传感器和一加速度传感器,分别接入力测量仪和加速度测量仪。
2、信号源调节为正弦激励,当调节信号源频率f时,如维持力的大小保持不变F=1N-1.5N (通道调节信号源的幅度),记录频率f与加速度a的数值,填表入下面的表格.
注意在谐振点附近时(一阶26Hz左右,二阶35Hz左右),频率的变化率应尽可能小,这样可以找准谐振点和比较准确计算阻尼.
3、调节阻尼大小,重做上面试验,观察阻尼的变化.
2-4用正弦扫频法测量两自由度的频率响应
框图:
目的:用正弦扫频法测量系统的频率响应函数。
步骤:
1、用激振器对准单自由度系统的质量块,对质量块进行激振。激振头装上阻抗头,阻
抗头中有一力传感器和一加速度传感器,分别接入力测量仪和加速度测量仪。
2、将信号源设置为扫频信号,频率范围可设置为10Hz-60Hz.扫频速度应与
采样的长度配合,如扫频速度较慢,应增加采样长度,扫频速度较快时,可以减小采样长度
3-1 用稳态激扰法测量简支梁结构的幅频响应曲线
框图:
目的:用稳态激扰法测量结构的幅频响应曲线、并用确定其1~4阶固有频率、相对阻尼系数(半功率点法)
步骤:
1、用激振器对准简支梁进行激振。激振头装上阻抗头,阻抗头中有一力传感器和一加速度传感器,分别接入力测量仪和加速度测量仪。
2、信号源调节为正弦激励,当调节信号源频率f时,如维持力的大小保持不变F=1N-1.5N (通道调节信号源的幅度),记录频率f与加速度a的数值,填表入下面的表格.
注意在谐振点附近时(在谐振点附近时,频率的变化应尽量小(1Hz左右).谐振点频率约为1阶46Hz,2阶173Hz,3阶400Hz,4阶691Hz),频率的变化率应尽可能小,这样可以找准谐振点和比较准确计算阻尼.
3、调节阻尼大小,重做上面试验,观察阻尼的变化.
3-2 用速度共振法测量简支梁固有频率
框图:
目的:用速度共振的相位判别法测量结构的1~4阶固有频率。
步骤:
1、通过加速度积分得到速度,采用阻抗头测力,共振时速度和力谐振时为同相,用李沙育图观察是一条直线。
2、慢慢调节信号源频率f(从10Hz开始,在谐振点附近时,频率的变化应尽量小),发生谐振时记录下该频率点,这即是1阶固有频率,以次类推找出1-4阶固有频率。系统的四阶固有频率1阶46Hz,2阶173Hz,3阶400Hz,4阶691Hz。
3-3 用共振法测量简支梁结构阻尼系数
框图:
目的:用共振法测量简支梁结构的1~4阶阻尼系数。
步骤:
1、通过加速度积分得到速度,采用阻抗头测力,共振时速度和力为同相,用李沙育图观察是一条直线。
2、调节信号源频率f(从10Hz开始,在谐振点附近时,频率的变化应尽量小),发生速度共振时记录速度幅值PB 和激振力幅值Fo。,即可计算出粘性阻尼系数r,并根据n=r/2m 算出衰减系数n;算出相对阻尼系数ξ。
3、以次类推,测量1-4阶阻尼系数。谐振点频率约为1阶46Hz,2阶173Hz,3阶400Hz,
4阶691Hz。
3-4 用正弦扫频法测量简支梁结构的频率响应
框图:
目的:用正弦扫频法测量简支梁的频率响应函数。
步骤:
1、信号源的频率范围可以设置在10Hz-900Hz。以随机采集的方式采集一段数据。
2、分析系统的频率响应函数。
3-5 用冲击激励法测量简支梁模态参数
框图:
目的:用冲击激励法测量简支梁的频率响应函数和振型
步骤:
1、"在教学装置选择"中,选择结构类型为"简支梁",如果选择等份数为10,将需要测量9个测点。
2、本试验可采用单点激励,多点响应的方式,也可采用多点激励,单点响应的方式,测量原点可以选择在第3点或第4点。
3、采用多点激励,单点响应的方式时,激励第1点,对应的激励为f1,响应为1,以此类推,测量完全部测点。
4、选择"教学装置模态分析和振型动画显示",调入测量数据进行分析。
4-1 用稳态激扰法测量固支梁结构的幅频响应曲线
框图:同3-3
目的:用稳态激扰法测量结构的幅频响应曲线、并用确定其1~4阶固有频率、相对阻尼系数(半功率点法)
步骤:同3-3
4-2 用速度共振法测量固支梁固有频率
框图:同3-4
目的:用速度共振的相位判别法测量固支梁结构的1~4阶固有频率。
步骤:同3-4
4-3 用共振法测量固支梁结构阻尼系数
框图:同3-5
目的:用共振法测量固支梁结构的1~4阶阻尼系数。
步骤:同3-5
4-4 用正弦扫频法测量固支梁结构的频率响应
框图:同3-6
目的:用正弦扫频法测量固支梁结构的频率响应
步骤:同3-6
4-5 用冲击激励法测量固支梁模态参数
框图:同3-7
目的:用冲击激励法测量固支梁的频率响应函数和振型
步骤:同3-7
5-1 用稳态激扰法测量悬臂梁结构的幅频响应曲线
框图:同3-3
目的:用稳态激扰法测量结构的幅频响应曲线、并用确定其1~4阶固有频率、相对阻尼系数(半功率点法)
步骤:同3-3
5-2 用速度共振法测量悬臂梁固有频率
框图:同3-4
目的:用速度共振的相位判别法测量悬臂梁结构的1~4阶固有频率。
步骤:同3-4
5-3 用共振法测量悬臂梁结构阻尼系数
框图:同3-5
目的:用共振法测量悬臂梁结构的1~4阶阻尼系数。
步骤:同3-5
5-4 用正弦扫频法测量悬臂梁结构的频率响应
框图:同3-6
目的:用正弦扫频法测量悬臂梁结构的频率响应
步骤:同3-6
5-5 用冲击激励法测量悬臂梁模态参数
框图:同3-7
目的:用冲击激励法测量悬臂梁的频率响应函数和振型
步骤:同3-7
6-1 用稳态激扰法测量一端简支一端固支梁结构的幅频响应曲线
框图:同3-3
目的:用稳态激扰法测量结构的幅频响应曲线、并用确定其1~4阶固有频率、相对阻尼系数(半功率点法)
步骤: 同3-3
6-2 用速度共振法测量一端简支一端固支梁固有频率
框图:同3-4
目的:用速度共振的相位判别法测量一端简支一端固支梁结构的1~4阶固有频率。
步骤:同3-4
6-3 用共振法测量一端简支一端固支梁结构阻尼系数
框图:同3-5
目的:用共振法测量一端简支一端固支梁结构的1~4阶阻尼系数。
步骤:同3-5
6-4 用正弦扫频法测量一端简支一端固支梁结构的频率响应
框图:同3-6
目的:用正弦扫频法测量一端简支一端固支梁结构的频率响应
步骤:同3-6
6-5 用冲击激励法测量一端简支一端固支梁模态参数
框图:同3-7
目的:用冲击激励法测量一端简支一端固支梁的频率响应函数和振型
步骤:同3-7
7-1用冲击激励法测量复合梁模态参数
框图:
目的:用冲击激励法测量复合梁的频率响应函数和振型
步骤:同3-7
8-1 用冲击激励法测量中心固定薄板模态参数
框图:
目的:用冲击激励法测量中心固定薄板的频率响应函数和振型
步骤:同3-7
9-1 测量悬索系统各阶固有频率并观察各阶主振型
框图:
目的:学会用共振法测量二自由度和三自由度系统的各阶固有频率,观察二自由度和三自由度系统的各阶主振型
步骤:
1、用非接触式激振器对准某一质量块,并保持初始间隙4-5mm,用标准砝码组弦丝张力1Kg.
2、激振器接入正弦信号后,对系统产生正弦激振力,系统将发生振动,激振信号频率由低到高
缓慢调节,观察质量块的振动幅值及系统的振动形态,即可打找到系统在张力为1Kg时各阶固有频率和主振型.
3、然后增加砝码分别为2、3、
4、5Kg,用同样的方法可找到张力为2、3、4、5Kg时的保阶
固有频率和主振型。
10-1 测量等强度梁的应变应力分布
框图:
目的:测量等强度梁上各点应变应力以及调整加载砝码后应变应力的变化规律。步骤:用静态应变仪测量等强度梁各测点的应变。在不加载的情况下测量各点应变,调整加载砝码的重量,再分别测量各点应变,观察应变分布规律。
汽车振动分析试题1
2008年振动力学期末考试试题 第一题(20分) 1、在图示振动系统中,已知:重物C 的质量m 1,匀质杆AB 的质量m 2,长为L ,匀质轮O 的质量m 3,弹簧的刚度系数k 。当AB 杆处于水平时为系统的静平衡位置。试采用能量法求系统微振时的固有频率。 解: 系统可以简化成单自由度振动系统,以重物C 的位移y 作为系统的广义坐标,在静平衡位置时 y =0,此时系统的势能为零。 AB 转角:L y /=? 系统动能: m 1动能:2 1121y m T = m 2动能:2222222 22 222)3 1(21))(31(21)31(2121y m L y L m L m J T ====? ω m 3动能:2322 323 33)2 1(21))(21(212 1y m R y R m J T === ω 系统势能: 2 21)21(21)21( y k y g m gy m V + +-= 在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,因而有: E y k gy m gy m y m m m V T =+ +-++= +2 212 321) 2 1(2 12 1)2 13 1(2 1 上式求导,得系统的微分方程为: E y m m m k y '=+ + +) 2 131(4321 固有频率和周期为: ) 2 131(43210m m m k + + = ω 2、质量为m 1的匀质圆盘置于粗糙水平面上,轮缘上绕有不可伸长的细绳并通过定滑轮A 连在质量为m 2的物块B 上;轮心C 与刚度系数为k 的水平弹簧相连;不计滑轮A ,绳及弹簧的质量,系统自弹簧原长位置静止释放。试采用能量法求系统的固有频率。 解:系统可以简化成单自由度振动系统,以重物B 的位移x 作为系统的广义坐标,在静平衡位置时 x =0,此时系统的势能为零。 物体B 动能:2 212 1x m T = 轮子与地面接触点为速度瞬心,则轮心速度为x v c 2 1= ,角速度为x R 21=ω,转过的角度为x R 21= θ。轮子动能: )83(21)41)(21(21)4 1( 2 12 1212 122 21212 2 12x m x R R m x m J v m T c =+= + = ω 系统势能: x
河流动力学实验
泥沙颗粒分析及沉降速度实验 一、试验目的 1、了解在实验室进行泥沙颗粒分析及沉速实验的一般方法; 2、掌握筛分法和移液管法的适用性及操作过程; 3、掌握泥沙颗粒级配曲线的绘制方法及沙样特征值的确定方法; 4、泥沙沉降现象可结合移液管法的操作过程进行观察。 二、试验方法及适用范围 1、筛分法:适用于泥沙粒径大于0.075mm的颗粒。 2、移液管法:适用于粒径小于0.075mm的颗粒。 3、若沙样中粗细颗粒兼有,则要联合使用筛分法及移液管法。 三、实验方法原理 1、对d>0.1mm的泥沙,应用筛分法测量泥沙颗粒级配。筛分法原理是利用孔径不同、逐级叠置的筛子,通过振动分选,再分别称出各级筛上的沙重,计算绘出沙样的级配曲线; 2、对d<0.1mm的泥沙,应用移液管法测量泥沙颗粒级配。移液管法原理为根据泥沙在沉降筒中沉降快慢的不同,来测定不同粒级的泥沙的数量,通过计算分析绘出沙样的级配曲线。 四、筛分法实验 1、仪器设备:振筛机、烘箱、天平、盛沙杯、沉降筒、温度计、干燥器等。试验筛:粗筛:圆孔孔径为60mm,40mm,20mm,10mm,5mm,2mm;细筛:孔径为2.0,1.0,0.5,0.25,0.1,0.075mm。 天平:称量1000g与称量200g;台秤:称量5kg。 振筛机:符合GB9909-88的技术条件。 其它:盛沙杯、沉降筒、温度计、干燥器等。 五、筛分法实验方法 1、将252.37g沙样放在精密天秤上称重,放入容量瓶的水中称其体积107ml,测出湿密度2.359g/ml。 2、将252.37g沙样放入干燥器中烘干,将烘干后的沙样作为试样放在天平/台
秤上称重为238.4g。(称量准确至0.1g,当沙样质量多于500g时,准确至1g). 2、将试样倒入依次叠好的最上层筛中,进行筛析。细筛宜放在振筛机上震摇,震摇时间一般为10-15min。 3、由最大孔径筛开始,顺序将各筛取下,在白纸上用手轻叩摇晃,如仍有土粒漏下,应继续轻叩摇晃,至无土粒漏下为止。漏下的土粒应全部放入下级筛内。并将留在各筛上的试样分别称量,准确至0.1g。称量并计算出小于各级筛的泥沙总重量。 4、各细筛上及底盘内土质量总和与筛前所取试样的质量之差0.92%不大于1%。
《振动力学》习题集(含答案)【精选】精心总结
《振动力学》习题集(含答案) 1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。求系统的固有频率。 图E1.1 解: 系统的动能为: ()2 22 121x I l x m T += 其中I 为杆关于铰点的转动惯量: 2102120131l m dx x l m x dx l m I l l ??==?? ? ??= 则有: ()2212212236 16121x l m m x l m x ml T +=+= 系统的势能为: ()()()2 1212124 1 4121 cos 12cos 1glx m m glx m mglx x l g m x mgl U +=+=-? +-= 利用x x n ω= 和U T =可得: ()()l m m g m m n 113223++= ω
1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。求系统的固有频率。 图E1.2 解: 如图,令θ为柱体的转角,则系统的动能和势能分别为: 22222243212121θθθ mR mR mR I T B =??? ??+== ()[]()22 22 12θθa R k a R k U +=+?= 利用θωθn = 和U T =可得: ()m k R a R mR a R k n 34342 2 +=+=ω
1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。 求系统的固有频率。 图E1.3 解: 系统的动能为: 2 2 1θ J T = 2k 和3k 相当于串联,则有: 332232 , θθθθθk k =+= 以上两式联立可得: θθθθ3 22 33232 , k k k k k k +=+= 系统的势能为: ()2 32323212332222121212121θθθθ?? ????+++=++= k k k k k k k k k k U 利用θωθn = 和U T =可得: ()() 3232132k k J k k k k k n +++= ω
河海大学力学08级振动力学结构动力学试卷
一、 1.在单自由度振动系统中,结构振动响应的频率与外加荷载的频率无关(×) 2.在含有阻尼的单自由度振动系统中,结构振动的固有频率与阻尼无关(×) 3.对于图示简支梁,不计梁的质量,分别将物体M 从在距梁中点正上方高H1和H2处 自由释放,H1=2H2,则振动的频率是一样的(√) 二、 1.如图所示,除支撑不同外,其余均相同。(B ) A.图a 振动周期大 B.图b 振动周期大 C.振动周期一样 D.不能判断 2.一物体从高度为h 的地方落下,系统振动频率是(C ) A.h 越大,频率越大 B.h 越大,频率越小 C.与h 无关 D.不能断定 3.对于一个有阻尼的单自由度强迫振动系统来讲,振动响应频率(C ) A.仅由外荷载频率确定 B.仅由系统固有频率确定 C.在系统振动响应一段时间后,仅与外荷载频率有关 D.在系统振动响应一段时间后,仅与系统固有频率有关 4.对于多自由度系统来讲,假设无重频现象,则两个不同的振型φi 和φj 的关系为(C ) A.j T i φφ?一定为零 B.j T i φφ?一定不为零 C.j T i M φφ一定为零 D.j T i K φφ可能不是零 5.对于一个三自由度系统,设某阶段振型为[]T 1,2,1=φ,骑广义质量为4,则其正则振型为(A )
A.[]T 5,0,1,5.0=φ B.[]T 25.0,5.0,25.0=φ C. []T 1,2,1=φ D.[]T 2,4,2=φ 三、一个单自由度振动系统,自由振动试验测得经过6周后振幅降为原来的1/10,试求阻尼比和在简谐荷载作用下发生共振时的放大系数(15) 解:ξπδm y y m i i y 2ln '==+ m=6 ∴10ln ln 6 =+i i y y ∴0611.06210ln =?=πξ 197.821==ξ μ 四、试写出图示结构的运动方程和位移动力系数(EI 为常数, t F t F θsin )(=) 解:a 12=F a 2 11=F 2____ M 1____M EI a 38311=δ EI a 65312=δ )(16 5)(1112t F t F Fe ==δδ )(16 5t F ky y m =+?? 3 383)2(3a EI a EI k == 383ma EI m k ==ω 211βμ-= EI ma 322θω?β== 32833a m EI EI θμ-= 五、如图所示结构,层间高度均为L ,m1=m2=m ,求系统的固有圆
机械行业振动力学期末考试试题(doc-11页)(正式版)
… 2008年振动力学期末考试试题 第一题(20分) 1、在图示振动系统中,已知:重物C 的质量m 1,匀质杆AB 的质量m 2,长为L ,匀质轮O 的质量m 3,弹簧的刚度系数k 。当AB 杆处于水平时为系统的静平衡位置。试采用能量法求系统微振时的固有频率。 解: 系统可以简化成单自由度振动系统,以重物C 的位移y 作为系统的广义坐标,在静平衡位置时 y =0,此时系统的势能为零。 AB 转角: 系统动能: % m 1动能: m 2动能: m 3动能: 系统势能: 在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,因而有: 上式求导,得系统的微分方程为: E y m m m k y '=+++) 2 1 31(4321 固有频率和周期为: ~ ) 2 131(43210m m m k ++= ω 2、质量为m 1的匀质圆盘置于粗糙水平面上,轮缘上绕有不可伸长的细绳并通过定滑轮A 连在质量为m 2的物块B 上;轮心C 与刚度系数为k 的水平弹簧相连;不计滑轮A ,绳及弹簧的质量,系统自弹簧原长位置静止释放。试采用能量法求系统的固有频率。 解:系统可以简化成单自由度振动系统,以重物B 的位移x 作为系统的广义坐标,在静平衡位置时 x =0,此时系统的势能为零。 物体B 动能:2212 1 x m T = 轮子与地面接触点为速度瞬心,则轮心速度为x v c 21=,角速度为x R 21=ω,转过的角度为x R 21 = θ。轮子动能: )83 (21)41)(21(21)41(212121212221212212x m x R R m x m J v m T c =+=+=ω \ x
振动力学》习题集(含答案)
《振动力学》习题集(含答案) 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图所示。求系统的固有频率。 图 解: 系统的动能为: ()22 2 121x I l x m T &&+= 其中I 为杆关于铰点的转动惯量: 2102120131l m dx x l m x dx l m I l l ??==?? ? ??= 则有: ()2 212212236 16121x l m m x l m x ml T &&&+=+= 系统的势能为: ()()()2 1212124 1 4121 cos 12 cos 1glx m m glx m mglx x l g m x mgl U +=+=-? +-= 利用x x n ω=&和U T =可得: ()()l m m g m m n 113223++= ω
质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图所示。求系统的固有频率。 图 解: 如图,令θ为柱体的转角,则系统的动能和势能分别为: 2222224321212 1θθθ&&&mR mR mR I T B =?? ? ??+== ()[]()22 22 12θθa R k a R k U +=+?= 利用θωθ n =&和U T =可得: ()m k R a R mR a R k n 34342 2 +=+=ω
转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图所示。求系统 的固有频率。 图 解: 系统的动能为: 22 1θ& J T = 2k 和3k 相当于串联,则有: 332232 , θθθθθk k =+= 以上两式联立可得: θθθθ3 22 33232 , k k k k k k +=+= 系统的势能为: ()232323212 332222*********θθθθ?? ????+++=++=k k k k k k k k k k U 利用θωθ n =&和U T =可得: ()() 3232132k k J k k k k k n +++= ω
振动实验报告
振动力学实验报告 学院:___________________ 班级:___________________ 学号:___________________ 姓名:___________________ 山东科技大学
单自由度系统振动实验报告 实验者姓名:________ 院系:_______系_______专业_______班_______组实验日期:________年________月________日 自由振动法测量单自由度系统的参数 一、实验目的 二、实验对象和装置 三、实验步骤 四、实验数据记录和整理 1、无阻尼单自由度自由振动系统实验测量:
计算单自由度振动的振动频率、周期、固有频率、衰减系数、相对阻尼系数周期、频率和阻尼系数: 2、有阻尼单自由度自由振动系统实验测量: 计算单自由度振动的振动频率、周期、固有频率、阻尼系数、相对阻尼系数: 五、简答 1、上述无阻尼自由振动实验中,为什么振动曲线呈现衰减状态? 2、简述阻尼对于自由振动周期、频率的影响。
用冲击激励法测量系统的频率响应函数 实验者姓名:________ 院系:_______系_______专业_______班_______组实验日期:________年________月________日 一、实验目的 二、实验对象和装置 三.实验步骤
四、实验数据记录和整理 1、无阻尼单自由度自由振动系统实验测量: 2、有阻尼单自由度自由振动系统实验测量: 五、简答 1、力锤施加力的大小是否影响单自由度系统的振动频率和阻尼,为什么? 2、实验过程中,力锤敲击质量块时应注意什么?
振动力学试验
SINOCERA? YE6251振动力学实验系统 实 验 指 导 书 (参考) 江苏联能电子技术有限公司 一、软件安装 运行光盘中YE6251控制软件目录中的setup.exe即可完成控制软件的安装。 用USB接口线连接计算机的USB口与调理器的USB口,打开调理器电源,这时计算机会提示找到新设备,并需要安装驱动程序,这时请指定驱动程序的安装路径为上面安装程序的目录下的 AQU采集器驱动\Win98(或Win2k或WinXP) 二、软件操作 1、登录输入 2、试验项目选择 选择当前的试验项目,包括系统名称、试验项目名称。下面以“简支梁系统”,用“冲击激励法测量模态参数”以例说明具体使用过程。 选择试验项目后,系统会自动显示本实验的实验向导,这样实验时可按照上面的实验向导的
步骤进行实验。 3、通道参数设置 当选择一个试验项目时,系统已经给出一个大致合理的通道设置,当然用户也可进行部分修改。通道参数包括测点号设置,通道是否测量设置,工程单位设置,以及满量程设置(也即通道增益选择),本试验实际是用第5通道测力锤信号,用第6通道测量加速度信号. “测点号”是描述测点位置的信息。 一般试验与通道号相对应,如通道号1,对应的测点号为1,通道号2对应的测点为2。 对于模态试验时,一般将实验对象划分为若干个测点,如简支梁划分为10等份(两端固定),共需测量9个测点,分别为测点1到测点9(自左向右),测量的方法一般为:如选择测点3位置作为原点,将加速度传感器置于第3点,用力锤依次敲击测点1到测点9,对应的力锤信号命名为f1到f9,对应的加速度信号命名为1到9,这样f1(激励)与1(响应)对应,f9(激励)与9(响应)对应,共测量了9组传递函数. “测量选择”表示左边的对应的通道是否测量。双击可以在测量与不测量之间切换。 “满量程”表示当前通道所通道测量的满度值。 对于位移通道有2档增益,1倍、10倍,对应的位移满量程为5000um、500um。 对于力通道有3档增益,1倍、 10倍、100倍,对于的力的满量程为5000N 、500N、50N。 对于加速度通道4档增益,1倍、 10倍、100倍、1000倍,对于的力的满量程为5000m/s2 、500m/s2、 50m/s2、 5m/s2 注意:当信号调理单元将力通道的增益设置为10倍时,请记住一定要在通道参数栏将该通道的满度值设置为500N(第2档),力通道的增益设置为100倍时,请记住一定要在通道参数栏将该通道的满度值设置为50N(第3档). 4、系统参数设置
振动习题答案分解
《振动力学》——习题 第二章 单自由度系统的自由振动 2-1 如图2-1 所示,重物1W 悬挂在刚度为k 的弹簧上并处于静止平衡位置,另一重物2W 从高度为h 处自由下落到1W 上且无弹跳。试求2W 下降的最大距离和两物体碰撞后的运动规律。 解: 2 22221v g W h W = ,gh v 22= 动量守恒: 122 122v g W W v g W +=,gh W W W v 221212+= 平衡位置: 11kx W =,k W x 1 1= 1221kx W W =+,k W W x 2 112+= 故: k W x x x 2 1120= -= ()2 121W W kg g W W k n +=+= ω 故: t v t x t x t x x n n n n n n ωωωωωωsin cos sin cos 12 000+ -=+-= x x 0 x 1 x 12 平衡位置
2-2 一均质等直杆,长为l ,重量为w ,用两根长h 的相同的铅垂线悬挂成水平位置,如图2-2所示。试写出此杆绕通过重心的铅垂轴做微摆动的振动微分方程,并求出振动固有周期。 解:给杆一个微转角θ 2a θ=h α 2F =mg 由动量矩定理: a h a mg a mg Fa M ml I M I 822cos sin 12 1 2 2-=-≈?-=== =αθ αθ 其中 1 2c o s s i n ≈≈θ αα h l ga p h a mg ml n 2 22 22304121==?+θθ g h a l ga h l p T n 3π23π2π22 2= == 2-3 一半圆薄壁筒,平均半径为R , 置于粗糙平面上做微幅摆动,如图2-3所示。试求 其摆动的固有频率。
振动力学期末考试试题和答案
振动力学期末考试试题和答案 振动力学(试题) 2008 一、填空(每空2分) 1、设周期振动信号的周期为,则其傅里叶级数的展开的基频为,T ,,, 2、单自由度粘性阻尼系统的阻尼因子与阻尼系数的关系为,,, , 作用下系统响应的稳态振3、单自由度粘性阻尼系统在简谐力ptsin,0 动的幅值为,,, 4、粘性阻尼一周期内所消耗的能量与频率成,,,比。 5、无阻尼多自由度系统的主振型正交关系为,,,,,, 6、写出多自由度系统再频率域的输入与输出之间的关系,,,,, 7、写出瑞利商的表达式,,,,,, r8、多自由度系统中共存在个主固有频率,其相应的主振型,,, 正交。 9、无阻尼多自由度系统,利用里兹法计算出的主振型关于M、K是 否正交,,,,(答是或否) 10、写出如图T-1所示梁的左端边界条件,,,,,,,,,, y L x K 图T-1 二、(20分)系统如图T-2所示,杆AB为刚性、均质,长度为,总L 质量为,弹簧刚度为,阻尼系数为。求系统的固有频率及阻mck
尼因子。 图T-2 三、系统如图T-3所示。求系统的固有频率与主振型。 k k k k k m m m X X X 123 图T-3 四、 五、(20分)简支梁如图T-5所示,弹性模量为E,质量密度为,, 横截面积为A,截面惯性矩为J。求梁在中央受集中弯矩M下的响应。(假设梁的初始状态为零)
图T-5 答案 一、填空(每空2分) 1、周期振动信号的周期为,则其傅里叶级数的展开的基频为 T2/,T 2、单自由度粘性阻尼系统的阻尼因子与阻尼系数的关系为, c ,, 2mk 作用下系统响应的稳态振3、单自由度粘性阻尼系统在简谐力ptsin,0 p10动的幅值为 ,,B222k,,,,,(1)(2) 4、粘性阻尼一周期内所消耗的能量与频率成,正,比。 5、无阻尼多自由度系统的主振型正交关系为加权(M,K)正交: 0()ij,0()ij,,,TTTT ,,,,M,K,,,ijijMij(),Kij(),pipi,, 6、写出多自由度系统在频率域的输入与输出之间的关系 21,其中 xHP()()(),,,,HKMiC()(),,,,,, TXKX7、写出瑞利商的表达式 ()RX,TXMX r8、多自由度系统中共存在个重固有频率,其相应的主振型,,加 权(M,K)正交。 MK9、无阻尼多自由度系统,利用里兹法计算出的主振型关于、是
《土动力学实验》
《土动力学实验》课程教学大纲 课程编号:031157 学分:0 周数:0.75周 大纲执笔人:黄茂松大纲审核人:李镜培 说明:《土动力学实验》是033027《土动力学》及031349《土动力学与基础抗震》课程的实验部分,该课程有课号、有学时、无学分。 一、实验性质与目的 《土动力学实验》是土木工程专业的实践环节课程。 其主要教学目的为:使学生了解土的动力特性,掌握地震区场地评价方法,了解砂土液化的基本概念及评价方法和处理措施,掌握基础振动分析方法并能够进行动力基础的设计,掌握地基基础的抗震强度验算方法以及抗震措施,掌握一些基本的实验方法如:地基土动力参数的测试、基础动力测试、桩基础动力检测等。 二、课程面向专业 土木工程专业 三、实验基本要求 1.通过实验掌握振动理论以及波动理论中的有关知识; 2.通过实验掌握波速测试的方法; 3.通过实验掌握激振法测试地基土动力特性参数的操作与数据处理。 四、实验教学基本内容 1.振动模型实验:对一质量-弹簧-阻尼体系激振,采集振动信号,采用质量-弹簧-阻尼体系振动理论分析振动数据。 2.波动模型实验:对一杆件的杆端进行激振,采集振动信号,采用应力波在一维杆件中的传播方程对数据进行处理。 3.波速测试现场实验:采用跨孔法测试地基土的剪切波波速。 4.激振法现场实验:采用竖向强迫激振法测试地基土的抗压刚度系数。 五、实验内容和主要仪器设备与器材配置
六、实验预习和实验报告的要求、考核方式 学生应当在实验以前掌握与实验有关的各方面的知识,如理论方面、操作方面、数据处理方面、工程应用方面。实验结束后编写实验报告,实验报告中要包括上面提到的四方面的内容。考核方式包括以下几个方面:1、实验操作;2、数据处理;3、报告编写。 七、学时分配 八、教材、实验指导书与主要参考书 教材: 《土动力学》,自编教材。 主要参考书: 《土与基础振动》,F.E Richart,Jr.U .S .A。 《土动力学》,Dao U.S.A浙江大学翻译。 实验指导书名称: 《土动力学基础》
上海交通大学2008年振动力学期末考试试题
上海交通大学2008年振动力学期末考试试题 第一题(20分) 1、在图示振动系统中,已知:重物C的质量m1,匀质杆AB的质量m2,长为L,匀质轮O的质量m3,弹簧的刚度系数k。当AB杆处于水平时为系统的静平衡位置。试采用能量法求系统微振时的固有频率。 解: 系统可以简化成单自由度振动系统,以重物C的位移y作为系统的广义坐标,在静平衡位置时y=0,此时系统的势能为零。 AB转角: 系统动能: m1动能: m2动能: m3动能: 系统势能: 在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,因而 有: 上式求导,得系统的微分方程为:
固有频率和周期为: 2、质量为m1的匀质圆盘置于粗糙水平面上,轮缘上绕有不可伸长的细绳并通过 定滑轮A连在质量为m2的物块B上;轮心C与刚度系数为k的水平弹簧相连;不计滑轮A,绳及弹簧的质量,系统自弹簧原长位置静止释放。试采用能量法求 系统的固有频率。 解:系统可以简化成单自由度振动系统,以重物B的位移x作为系统的广义坐标,在静平衡位置时x=0,此时系统的势能为零。 物体B动能: 轮子与地面接触点为速度瞬心,则轮心速度为,角速度为,转过的角度为。轮子动能: 系统势能: 在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,有:上式求导得系统的运动微分方程:
固有频率为: 第二题(20分) 1、在图示振动系统中,重物质量为m,外壳质量为2m,每个弹簧的刚度系数均为k。设外壳只能沿铅垂方向运动。采用影响系数方法:(1)以x1和x2为广义坐标,建立系统的微分方程;(2)求系统的固有频率。 解: 系统为二自由度系统。 当x1=1,x2=0时,有:k11=2k,k21=-2k 当x2=1,x2=1时,有:k22=4k,k12=-2k 因此系统刚度矩阵为: 系统质量矩阵为: 系统动力学方程为: 频率方程为: 解出系统2个固有频率: ,
振动力学参考答案
请打双面 习题与综合训练第一章 2-1一单层房屋结构可简化为题2-1图所示的模型,房顶质量为m,视为一刚性杆;柱子 高h,视为无质量的弹性杆, 其抗弯刚度为EJ。求该房屋 作水平方向振动时的固有 频率。 解:由于两根杆都是弹性的,可以看作是两根相同的弹簧的并联。 等效弹簧系数为k 则 其中为两根杆的静形变量,由材料力学易知 = 则= 设静平衡位置水平向右为正方向,则有 所以固有频率 2-2一均质等直杆,长为 l,重量为W,用两根长h的相同的铅垂线悬挂成水平位置,如题2-2图所示。试写出此杆绕通过重心的铅垂轴作微摆动的振动微分方程,并求出振动固有周期。 解:给杆一个微转角θ θ=hα 2F=mg 由动量矩定理: 其中 2-3求题2-3图中系统的固有频率,悬臂梁端点的刚度分别是和,悬臂梁的质量忽略不计。 解:悬臂梁可看成刚度分 别为k1和k3的弹簧,因此,k1 与k2串联,设总刚度为k1ˊ。 k 1 ˊ与k3并联,设总刚度为k2 ˊ。k2ˊ与k4串联,设总刚度 为k。即为 ,, mg kδ =δ δ 3 24 mgh EJ = k3 24EJ h " m x kx =- 3 n 24 mh EJ p= 2 a a h a mg a mg Fa M ml I M I 8 2 2 cos sin 12 1 2 2 - = - ≈ ? - = == = α θ α θ&& 1 2 cos sin≈ ≈ θ α α h l ga p h a mg ml n2 2 2 2 2 3 4 12 1 = = ? +θ θ&& g h a l ga h l p T n 3 π2 3 π2 π2 2 2 = = = 1 k3k 2 1 2 1 1k k k k k + = ' 2 1 2 1 3 2k k k k k k + + = ' 4 2 4 1 2 1 3 2 3 1 4 2 1 4 3 2 4 2 1 k k k k k k k k k k k k k k k k k k k k + + + + + + = θ F sinα 2 θ α F h mg θ F
2008年期末振动力学考试试题
2008年振动力学期末考试试题 大学期末考试https://www.360docs.net/doc/3b1297377.html, 第一题(20分) 1、在图示振动系统中,已知:重物C的质量m1, 匀质杆AB的质量m2,长为L,匀质轮O的质量 m3,弹簧的刚度系数k。当AB杆处于水平时为 系统的静平衡位置。试采用能量法求系统微振 时的固有频率。 解: 系统可以简化成单自由度振动系统,以重物C的位移y作为系统的广义坐标,在静平衡位置时y=0,此时系统的势能为零。 AB转角: 系统动能: m1动能: m2动能: m3动能: 系统势能: 在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,因而有:
上式求导,得系统的微分方程为: 固有频率和周期为: 2、质量为m1的匀质圆盘置于粗糙水平面上,轮缘 上绕有不可伸长的细绳并通过定滑轮A连在质量 为m2的物块B上;轮心C与刚度系数为k的水平 弹簧相连;不计滑轮A,绳及弹簧的质量,系统自 弹簧原长位置静止释放。试采用能量法求系统的固 有频率。 解:系统可以简化成单自由度振动系统,以重物B的位移x作为系统的广义坐标,在静平衡位置时x=0,此时系统的势能为零。 物体B动能: 轮子与地面接触点为速度瞬心,则轮心速度为,角速度为,转过的角度为。轮子动能: 系统势能:
在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,有: 上式求导得系统的运动微分方程: 固有频率为: 第二题(20分) 1、在图示振动系统中,重物质量为m,外壳质量为2m, 每个弹簧的刚度系数均为k。设外壳只能沿铅垂方向运 动。采用影响系数方法:(1)以x1和x2为广义坐标, 建立系统的微分方程;(2)求系统的固有频率。 解: 系统为二自由度系统。 当x1=1,x2=0时,有:k11=2k,k21=-2k 当x2=1,x2=1时,有:k22=4k,k12=-2k 因此系统刚度矩阵为: 系统质量矩阵为:
磁悬浮动力学实验
DHSY- 1型磁悬浮动力学实验仪 实验一动力学基础实验 随着科技的发展,磁悬浮技术的应用成为技术进步的热点,例如磁悬浮列车。永磁悬浮技术作为一种低耗能的磁悬浮技术,也受到了广泛关注。本实验使用的永磁悬浮技术,是在磁悬导轨与滑块两组带状磁场的相互作斥力之下,使磁悬滑块浮起来,从而减少了运动的阻力,来进行多种力学实验。通过实验,学生可以接触到磁悬浮的物理思想和技术,拓宽知识面,加深牛顿定律等动力学方面的感性知识。 本实验仪可构成不同倾斜角的斜面,通过滑块的运动可研究匀变速运动直线规律,加速度测量的误差消除,物体所受外力与加速度的关系等。 【一】实验目的 1.学习导轨的水平调整,熟悉磁悬导轨和智能速度加速度测试仪的调整和使用; 2.学习矢量分解; 3.学习作图法处理实验数据,掌握匀变速直线运动规律; 4.测量重力加速度g,并学习消减系统误差的方法; 5.探索牛顿第二定律,加深物体运动时所受外力与加速度的关系; 6.探索动摩擦力与速度的关系。 【二】实验原理 1.瞬时速度的测量 一个作直线运动的物体,在△ t时间内,物体经过的位移为△ s,则该物体在△ t时间内的平均速度为 △s v 二 为了精确地描述物体在某点的实际速度,应该把时间△t取得越小越好, △t越小,所求得的平均速度越接近实际速度。当△t T0时,平均速度趋近于一个极 限,即即 =li m^f =li m o v⑴ v 这就是物体在该点的瞬时速度。 但在实验时,直接用上式来测量某点的瞬时速度是极其困难的,因此,一般在一定误 差范围内,且适当修正时间间隔(见图5、6),可以用历时极短的△ t内的平均速度近似 地代替瞬时速度。
振动力学试验
Q SINOCERA? 振动力学实验系统 YE6251 实 验 指 导 书 (参考) 江苏联能电子技术有限公司
一、 软件安装 运行光盘中YE6251控制软件目录中的setup.exe即可完成控制软件的安装。 用USB接口线连接计算机的USB口与调理器的USB口,打开调理器电源,这时计算机会提示找到新设备,并需要安装驱动程序,这时请指定驱动程序的安装路径为上面安装程序的目录下 的AQU采集器驱动\Win98(或Win2k或WinXP) 二、软件操作 1、登录输入 2、试验项目选择 选择当前的试验项目,包括系统名称、试验项目名称。下面以“简支梁系统”,用“冲击激励法测量模态参数”以例说明具体使用过程。 殆普黑杓曲樹晰率是5抽左右"廉憫率辭2KX- G1阶超舷刮fi为 ^6. 3Hz, 1^7. F“4拋.孚襲査违擇” T .诜释谿也羹12力“简变棄"?如黑嗟 算孝心魏力沙? :■;单戸激唏,君也响脚方式」也可耒用君戌iSW0 .单点 嚥]J?的方 弍.刖壘5点可U垒舞在第疣郵肌氣 应翳唏亶塹氨艮胃朋分式耐*希朗I 棚的帧加1.响应为1 > 选择试验项目后,系统会自动显示本实验的实验向导,这样实验时可按照上面的实验向导的 步骤进行实验。 3、通道参数设置 当选择一个试验项目时,系统已经给出一个大致合理的通道设置,当然用户也可进行部分修 改。通道参数包括测点号设置,通道是否测量设置,工程单位设置,以及满量程设置(也即通 道增益选择),本试验实际是用第5通道测力锤信号,用第6通道测量加速度信号? 通道号砌点号|测星选择工程单询星程 mV5000. 00 2 2 | X mV EOOD.OD 3 3 X mV§000. 00 4 4 J X Ulh□000 00 S fl 丁/N5Q0. 00 6 1. 1450 0D 77[X-即/ M250D 00 “测点号”是描述测点位置的信息。 -般试验与通道号相对应,如通道号1,对应的测点号为1,通道号2对应的测点为2。 I为至弊苛困在iliS蜀语幷动前相 竝歪 2训星連曳扣速度旅芒 1冃盘度其-捕云世星匡商鉢 M^M 字生登瞌输 陕验數菇越径M钿 云
振动力学研究生期末考试题
西南交通大学2009-2010学年第( 1 )学期考试试卷 课程代码 6332200 课程名称 振动力学 考试时间 120 分钟 阅卷教师签字: 一、如图所示系统,设杆AB 为刚性杆,其对A 点的转动惯量为I =1 kgm 2,杆长L =1 m 。在B 端有一集中质量块,杆的中间和B 端分别有弹簧支承。已知质量块质量m =10 kg ,弹簧系数k 1=40 N/m ,k 2=100 N/m 。试以集中质量块的位移x 为参照,(1)求系统的等效质量和等效刚度;(2)系统的周期是多少?(3)建立系统的运动微分方程。 (15分) 班 级 学 号 姓 名 密封装订线 密封装订线 密封装订线 x
二、横截面面积为A、质量为m的圆柱形浮子,静止在密度为ρ的液体中。设从静平衡位置压低距离x0,然后无初速地释放,假定阻尼可以忽略不计。 (1)试建立浮子的运动方程; (2)给出浮子的固有频率及初始条件; (3)求浮子自由运动的响应。(15分)
三、如图所示滑轮系统,在运动过程中,假设不可伸长绳与滑轮之间无相对滑动。已知m1=9 kg,m2=8 kg,滑轮A的半径R A=0.1 m,对其转轴的惯性矩I A=0.01 kgm2,滑轮B的半径R B=0.2 m,对其转轴的惯性矩I B=0.08 kgm2,弹簧系数k1=k2= k3=1000 N/m。试求: (1)系统的运动方程; (2)系统的频率及振型; (3)验证振型关于质量阵加权正交。(20分) 1 m
四、图所示的弹簧质量系统,x 1为质量m 1的绝对位移,x 2为质量m 2的绝对位移, 取k k k k m m m =====32121,2,m 。已知系统的运动方程为: ?? ? ???=????????????+--++????????????0000213222212121x x k k k k k k x x m m (1) 采用瑞利商估算系统的基频; (2) 采用矩阵迭代法求系统的基频及振型。 (20分)
09-10-02振动力学试卷08级56学时A卷
中北大学 振动力学课程考试试题(课程名称须与教学任务书相同) 2009/2010 学年第 2 学期 试题类别 A 拟题日期2010-5-29 拟题教师关学锋 课程编号02073105 教师编号1120009 教学院长系主任 课程结束时间2010-5-22 印刷份数100 使用班级08070641 08070642 备注:(1)试题要求按指定规格计算机打印,并将其电子稿于课程结束前20天交评估与考试中心命题科。 (2)试题类别指A卷或B卷。 (3)试题印制手续由院教务科统一到评估与考试中心命题科办理。
2009-2010学年第二学期期末考试试题(A 卷) 振动力学(56学时) 使用班级: 08070641 08070642 如图所示是一个倒置的摆。摆球质量为m ,刚杆质量可忽略,每个弹簧的刚度为 2 k 。(1)求倒摆作微幅振动时的固有频率。(2)摆球质量m 为0.9kg 时,测得频率n f 为1.5Hz ,质量m 为1.8kg 时,测得频率n f 为0.75Hz ,问摆球质量为多少千克时恰使系统处于不稳定平衡状态?
如图所示的系统中,刚杆质量不计,写出运动微分方程,并求临界阻尼系数及阻尼固有频率。
建立如图所示弹簧质量系统运动的作用力方程。 k 5k 6 P 1 2 3
用瑞利法计算图所示系统的基频。
试求一端固定一端自由杆纵向自由振动的固有频率和主振型。 (注:微分方程22 222u u a t x ??=??可的通解为12(,)()()(sin cos )sin()u x y U x T t B x B x b t a a ω ω ω?==++)
振动力学吸震器发展 应用
吸 振 器 发 展 、 原 理 及 应 用 机电学院 机械设计制造及其自动化 机电121 朱强 20120334121
绪论 自从人类诞生以来,就不断地在改造着世界。尤其是进入20世纪以来,世界发生了 翻天覆地的变化:科学技术突飞猛进,社会生产力极大提高,经济规模空前扩大,物质 极大丰富。然而,与此同时,人类与自然的关系也在急剧的变化,资源面临枯竭,污染 日益严重,震惊世界的公害事件频频发生……环境问题已经成为了政府、社会关注的焦点,它将通过法律法规、国际公约、公众环保意识以及经济规律影响企业行为,影响社 会经济的变革与发展。因此正确处理环境、经济和技术之间的关系,已经成为决定未来 企业竞争能力的关键因素。 机电产品绿色设计包括振动工程,而振动控制是振动工程的一个重要科学分支。广义 来说,振动控制包含诱发振动和控制振动两个范畴。 振动控制的措施大致分为五种:1.消振或减弱振源 2.隔震 3.动力吸振 4.阻尼减振 5.结构修改。在结构振动控制中,动力吸振器的研究和应用已得到了不断的发展。动力 吸振器是建立在反共振原理基础上的,提摩盛科早在1928年就解决了正弦激励下动力 吸振器的设计问题。80年代,国内曾利用动力吸振器成功排除了某改型飞机尾舵的扰 流振故障。研究动力吸振器模拟问题,归根到底是一个数学优化问题和机械仿真问题。一、发展背景 动力吸振器自1911年问世以来,在实践中得到了广泛的应用。它通过在需要减振的结构(称为主系统)上附加子结构,改变系统的振动能量的分布和传递特性,使振动能量转移到附加的子结构上,从而达到控制主系统振动的目的。传统的动力吸振器多属被动控制,它对于主系统的窄带响应有着良好的吸振效果,但由于其吸振带宽不可调节,对于宽频激励引起的主系统的振动,吸振效果不是很理想。 近年来,对于主动吸振器的大量研究表明,主动吸振器可以根据主系统的振动状态,自动调节自身的结构参数或振动状态,实现宽频吸振,提高了吸振器减振效果,大大拓宽了吸振器的应用范围。根据吸振器自动调节机理的不同,主动吸振器可分为全主动式吸振器和半主动式吸振器。全主动式吸振器是根据主系统的振动状态反馈调节吸振器的振动状态,使其对主
【免费下载】振动力学 习题
《振动力学》——习题第二章 单自由度系统的自由振动2-1 如图2-1 所示,重物悬挂在刚度为k 的弹簧上并处于静止平衡位置,另一重物 1W 2 W 从高度为h 处自由下落到上且无弹跳。试求下降的最大距离和两物体碰撞1W 2W 后 的运动规律。 图2-1 图2-22-2 一均质等直杆,长为l ,重量为w ,用两根长h 的相同的铅垂线悬挂成水平位置,如图2-2所示。试写出此杆绕通过重心的铅垂轴做微摆动的振动微分方程,并求出振动固有周期。2-3 一半圆薄壁筒,平均半径为R , 置于粗糙平面上做微幅摆动,如图2-3所示。试求 其摆动的固有频率。 图2-3 图2-42-4 如图2-4 所示,一质量m 连接在一刚性杆上,杆的质量忽略不计,试求下列情况系统作垂直振动的固有频率: (1)振动过程中杆被约束保持水平位置; (2)杆可以在铅垂平面内微幅转动; (3)比较上述两种情况中哪种的固有频率较高,并说明理由。2-5 试求图2-5所示系统中均质刚性杆AB 在A 点的等效质量。已知杆的质量为 m ,A 、管路敷设技术通过管线敷设技术,不仅可以解决吊顶层配置不规范问题,而且可保障各类管路习题到位。在管路敷设过程中,要加强看护关于管路高中资料试卷连接管口处理高中资料试卷弯扁度固定盒位置保护层防腐跨接地线弯曲半径标高等,要求技术交底。管线敷设技术中包含线槽、管架等多项方式,为解决高中语文电气课件中管壁薄、接口不严等问题,合理利用管线敷设技术。线缆敷设原则:在分线盒处,当不同电压回路交叉时,应采用金属隔板进行隔开处理;同一线槽内,强电回路须同时切断习题电源,线缆敷设完毕,要进行检查和检测处理。、电气课件中调试对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料试卷相互作用与相互关系,根据生产工艺高中资料试卷要求,对电气设备进行空载与带负荷下高中资料试卷调控试验;对设备进行调整使其在正常工况下与过度工作下都可以正常工作;对于继电保护进行整核对定值,审核与校对图纸,编写复杂设备与装置高中资料试卷调试方案,编写重要设备高中资料试卷试验方案以及系统启动方案;对整套启动过程中高中资料试卷电气设备进行调试工作并且进行过关运行高中资料试卷技术指导。对于调试过程中高中资料试卷技术问题,作为调试人员,需要在事前掌握图纸资料、设备制造厂家出具高中资料试卷试验报告与相关技术资料,并且了解现场设备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。、电气设备调试高中资料试卷技术电力保护装置调试技术,电力保护高中资料试卷配置技术是指机组在进行继电保护高中资料试卷总体配置时,需要在最大限度内来确保机组高中资料试卷安全,并且尽可能地缩小故障高中资料试卷破坏范围,或者对某些异常高中资料试卷工况进行自动处理,尤其要避免错误高中资料试卷保护装置动作,并且拒绝动作,来避免不必要高中资料试卷突然停机。因此,电力高中资料试卷保护装置调试技术,要求电力保护装置做到准确灵活。对于差动保护装置高中资料试卷调试技术是指发电机一变压器组在发生内部故障时,需要进行外部电源高中资料试卷切除从而采用高中资料试卷主要保护装置。