(G题)智能搬运小车系统-2016年浙江理工大学电子设计竞赛试题

2016年浙江理工大学大学生
电子设计竞赛试题
参赛注意事项
(1)3月20日8:00竞赛正式开始。本科组参赛队大三只能在【本科组】题目D题和E题中中任选一题;
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)3月30日18:00竞赛结束,上交设计报告、制作实物(包括小车、木块和模拟的场地)及《登记表》,由专人封存。
智能搬运小车系统(G题)
【本科组】
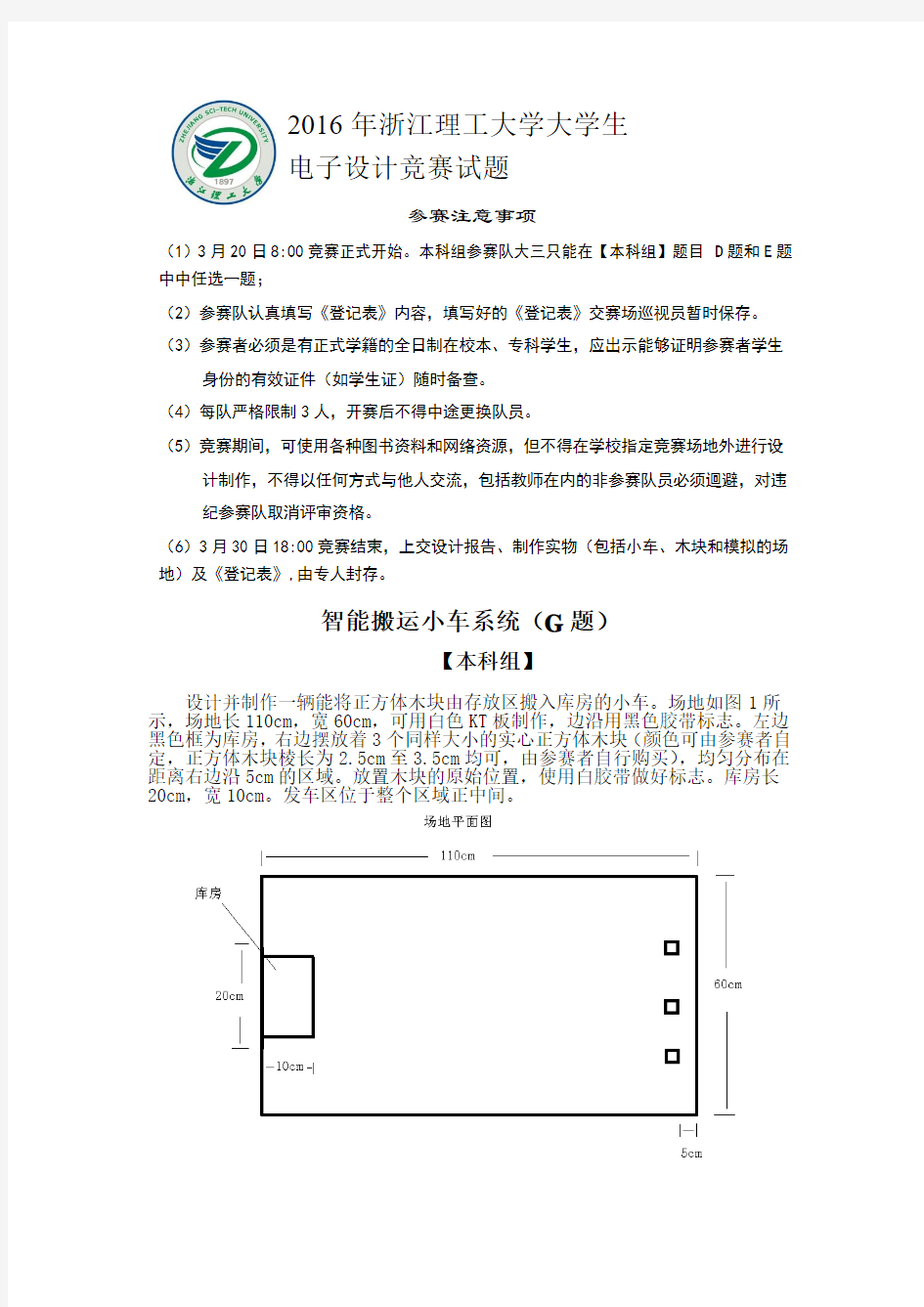
设计并制作一辆能将正方体木块由存放区搬入库房的小车。场地如图1所示,场地长110cm,宽60cm,可用白色KT板制作,边沿用黑色胶带标志。左边黑色框为库房,右边摆放着3个同样大小的实心正方体木块(颜色可由参赛者自定,正方体木块棱长为2.5cm至3.5cm均可,由参赛者自行购买),均匀分布在距离右边沿5cm的区域。放置木块的原始位置,使用白胶带做好标志。库房长20cm,宽10cm。发车区位于整个区域正中间。
基本要求:
1.在搬运木块过程中,必须使木块离开地面;
2.将3个正方体木块搬运到库房区域内;
3.使用液晶显示屏或8位数码管正确显示已完成搬运的木块数量;
4.搬运完成后,要求一个木块居中摆放在库房内,其余两个对称摆放在两
边,并且3个木块间隔距离不小于1cm。
发挥部分:
小车上装有一个开关,当把开关闭合后,重新启动小车,小车能实现自主将木块搬运到库房,并且三个木块层叠在一起,居中摆放在库房里。
说明:
1.在系统运行过程中不能采取无线遥控等人为干预措施;
2.电机驱动、主控板等可以使用实验室已有模块,但必须自己另画出电路
原理图和PCB图,鼓励自己设计各个模块电路;
3.控制程序必须自己设计,在答辩环节能说清楚主要程序的设计方法;
4.抓取木块的装置,可以购买,鼓励自己设计;
5.如图1所示,除了已有标志线,不得在场地内设置其他标志线或标志物;
6.小车在搬运过程中,车轮不能驶出区域边线外;
7.在搭建智能小车时,应考虑到设备购置成本问题,在完成同样的任务量
时,设备购置成本越低的得分越高;
8.设计报告里必须描述清楚操作说明。
智能超声波避障小车地设计与制作
江阴职业技术学院项目设计报告 项目:超声波避障小车的设计与制作 专业 学生姓名 班级 学号 指导教师 完成日期
摘要 智能小车是一种能够通过编程手段完成特定任务的小型化机器人,它具有制作成本低廉,电路结构简单,程序调试方便等优点。由于具有很强的趣味性,智能小车深受广大机器人爱好者以及高校学生的喜爱。 本论文介绍的是具有自动避障功能的智能小车的设计与制作(以下简称智能小车),论文对智能小车的方案选择,设计思路,以及软硬件的功能和工作原理进行了详细的分析和论述。经实践验收测试,该智能小车的电路结构简单,调试方便,系统反映快速、灵活,设计方案正确、可行,各项指标稳定、可靠。
Abstract Smart cars can be programmed to perform a specific task means the miniaturization of robot, it has to make cost is low, circuit simple structure, convenient program test. Because of it has strong interest, intelligent robot car favored by the majority of the university students' enthusiasts and love. This paper introduces the is a automatic obstacle avoidance function of intelligent car design and production (hereinafter referred to as the smart car), the thesis to the intelligence of the car scheme selection, design idea, and the implementation of hardware and software function and working principle of a detailed analysis and discusses. After practice acceptance test, this intelligent car circuit structure is simple, convenient debug, fast, flexible system reflect, correct and feasible design scheme, each index is steady and reliable.
智能搬运小车比赛规则
比赛目的 设计一个轮式小型机器人,在比赛场地里移动,将不同颜色、形状或者材质的物体分类搬运到不同的对应位置。比赛的记分根据机器人将物体放置的位置精度和完成时间来决定分值的高低。它模拟了工业自动化过程中自动化物流系统实际工作过程。 比赛内容及任务 在规定时间内,机器人完成物料的分类搬运,并回到出发点,具体如下: 机器人采用轮式机器人形式;机器人从出发区出发,到达物料储存区后,分拣其赛前抽签决定好的任务,即从5个预知颜色料块(黄、白、红、黑、蓝)抽3种颜色料块,然后抽3种颜料块在A、C、E的摆放位置,随后在已知6种组合(任务)中,选其中1个作为比赛任务(料块均要求摆放在场地图的A、C、E位置,B、D位置不放置物料,场地图参见比赛规则:比赛场地),再按照设计好的控制策略控制机器人动作,以便将三个料块快速准确地搬运到对应的三个颜色中心区域内,最后回到出发区。
规则一比赛场地
规则 1.1 尺寸 比赛场地为正方形。 规则 1.2 场地区域及标识 比赛场地用直线、圆及数字进行标识。详见图1、图2。
图 1 场地示意图 图 2 机器人出发区
规则二比赛用料块 使用5 个直径为40、高度为40 的料块,颜色分别为黄色、白色、红色、黑色、蓝色。可用白色PVC水管,侧面用喷绘不干胶贴装,并在中间增加十字形标记,以准确获得中心计分点。 规则三比赛队员装备 为了能公平比赛,本次比赛对于参赛队使用的机器人做如下限制,以便各个参赛队能在公平的平台上进行比赛。 1.控制器要求,组办方提供8051控制器,参赛队也可使用其他类型控制器。 2.轮子直径≤80mm。 3.机器人可以在规则允许的条件下,扩展多种传感器来对机器人的比赛进行精确的控制,以求更好的成绩。 4.机器人尺寸:机器人在地面的投影不超出:长250mm×宽160mm。 规则四裁判 1、规定项目比赛:每场比赛将委派两名裁判执行裁判工作,裁判员在比赛过程中所作的判决将为比赛权威判定结果,参赛队伍必须接受裁判结果。 2、裁判责任: 执行比赛的所有规则。 监督比赛的犯规现象。 记录比赛的成绩和时间。 核对参赛队伍的资质。 审定场地,机器人等是否符合比赛要求。 规则五比赛要求 1.比赛场地上有五个不同颜色(黄、白、红、黑、蓝)的得分区域,参赛队赛前进行现场抽签,每支队伍可以有最长5 分钟的调试时间。参赛队根据确定的任务进行准备调试。2.如现场条件许可,正式比赛前,所有机器人将统一编号,并摆放在指定区域。比赛时到摆放区域直接领取相应的机器人参加比赛。比赛完成再放回摆放地点。所有比赛结束方可领回机器人。如需维修等事宜需请示现场裁判是否许可。如现场条件限制,由竞赛委员会商讨决定如何编号等事宜。 3.各个队机器人参赛队按照赛前抽签的方式决定比赛出场次序并进行比赛。抽签时首先抽出三种色块,然后抽三种色块在A、C、E 的摆放位置;色块的颜色、位置和摆放顺序都是现场抽签决定的。 4.每支参赛队伍的正式比赛时间最长为3 分钟,机器人在得到裁判指令后启动,没有裁判指令不可以再次接触机器人,由机器人自主运行完成比赛,如果机器人连续停止运行超过20秒,则自动终止比赛。 6.设置“2 秒违例”规则,即计时开始后操作机器人的总时间不得超过2 秒,2 秒钟后人为触动任何一台机器人均视为违例,裁判将终止比赛并不计得分。 规则六比赛记分标准 规则 6.1 成绩及排名
基于51单片机设计智能避障小车
单片机设计智能避障小车 摘要 利用红外对管检测黑线与障碍物,并以STC89C51单片机为控制芯片控制电动小汽车的速度及转向,从而实现自动循迹避障的功能。其中小车驱动由L298N 驱动电路完成,速度由单片机输出的PWM波控制。本文首先介绍了智能车的发展前景,接着介绍了该课题设计构想,各模块电路的选择及其电路工作原理,最后对该课题的设计过程进行了总结与展望并附带各个模块的电路原理图,和本设计实物图,及完整的C语言程序。 关键词:智能小车;51单片机;L298N;红外避障;寻迹行驶 abstract Using infrared detection black and obstacles to the line and STC89C51 microcontroller as the control chip to control the speed of the electric car and steering, so as to realize the function of automatic tracking and obstacle avoidance. Which the car driven by the L298N driver circuit is completed, the speed of the microcontroller output PWM wave control. This article first introduces the development of the intelligent car prospect, then introduces the design idea, the subject selection of each module circuit and working principle of the circuit, the design process of the subject is summarized and prospect with each module circuit principle diagram, and the real figure design, and complete C language program. Key words: smart car; 51 MCU; L298N; infrared obstacle avoidance; track driving
智能避障小车
目录 1. 绪论 (5) 2. 方案设计与论证 (6) 2.1 主控系统 (6) 2.2寻迹模块 (7) 2.3 避障模块 (8) 2.4 机械系统 (10) 2.5 电源模块 (10) 3. 硬件设计 (12) 3.1总体设计 (12) 3.2驱动电路 (12) 3.3 PWM控制技术分析 (13) 3.4检测模块 (13) 4. 软件设计 (15) 4.1系统软件设计说明 (15) 4.2程序框图 (15) 结束语 (16) 参考文献 (17) 致谢 (18) 附录程序清单 (19)
摘要 随着机器人技术的发展, 自主移动机器人以其活性和智能性等特点, 在人们的生产、生活中的应用来越广泛。自主移动机器人通过各种传感器系统感知外界环境和自身状态, 在复杂的已知或者未知环境中自主移动并完成相应的任务。而在多种探测手段中, 超声波传感器与光电寻迹系统由于具有成本低, 安装方便, 不容易受电磁、光线、被测对象颜色、烟雾等影响, 时间信息直观等特点, 对于被测物处于黑暗、有灰尘、烟雾、电磁干扰、有毒等恶劣的环境下有一定的适应能力, 因此在移动机器人领域有着广泛的应用。 关键词:智能小车;STC89C52单片机;超声波检测模块;光电寻迹
Abstract With the development of robotics, autonomous mobile robots play an important role in our manufacture and society for its characteristics: flexible and intelligent. Autonomous mobile robots sense the outside environment and their states with a variety of sensor systems’help. They walk in the complex and known or unknown environment to complete tasks. Moreover, among the methods of detection, ultrasonic wave sensors and photoelectric components are low cost, easy to installation, not susceptible to electromagnetic, light, objects’ color s and smoke, and easy to see time information. Therefore, they can be used in the darkness, dust, smoke, electromagnetic interference, toxic and other harsh environment. In other words, the components have a wide range of applications in the area of mobile robots. Keyword: Intelligent Car, STC89C52 Microcontroller, Ultrasonic Wave Component, Photoelectric Component
智能搬运,小车讲解
智能搬运小车 摘要: 关键词:单片机,PWM,光电传感器,运货小车 1.引言 1.1智能搬运小车研究的背景和目的: 运货是各个行业不可或缺的过程,人工运货随着经济的快速发展,不能完全满足市场的需求。世界上许多国家都在积极进行智能车辆的研究和开发设计。移动机器人是机器人学中的一个重要分支,出现于20世纪60年代。当时斯坦福研究院的Nils Nilssen和charles Rosen等人,在1966年至1972年中研制出了取名shakey的自主式移动机器人,目的是将人工智能技术应用在复杂环境下,完成机器人系统的自主推理、规划和控制。从此,移动机器人从无到有,数量不断增多,智能车辆作为移动机器人的一个重要分支也得到越来越多的关注。 智能搬运小车可以安装不同的末端以完成各种不同形状和状态的工件搬运工作,可以广泛应用于机床上下料,冲压机自动化生产线,自动装配流水线,码垛搬运,集装箱等的自动搬运,大大减轻了人类繁重的体力劳动,具有广阔的市场前景。 1.2智能搬运小车的功能介绍: 智能搬运小车希望能够希望得到可以自动抓取货物,循迹行进,自动卸货物的功能。 2.总体方案及论证 2.1系统结构框图: 图1.系统结构框图 2.2具体设计: 整个系统包括单片机控制模块、电机驱动模块、光电传感器模块、机械手
模块、模拟电源模块、小车车体。将单片机控制模块,驱动模块固定在小车上端;光电电传感器安装在小车底部;将机械手安装在小车上部的前端;车架结构选择铝板。 2.2.1系统机械部分 采用铝板安装设计图纸自行加工。即根据图纸首先用剪床剪得合适大小的铝板,再用钳工和折床将铝板做成合适的形状,再用钻床钻孔,用车床加工轴,用铣床加工轴套,最后安装即可得到所需的机械部分。 图2.小车底盘 图3.轴承座
智能搬运小车
智能搬运小车 摘要: 设计一个轮式小型机器人,在比赛场地里移动,将不同颜色、形状或者材质的物体分类搬运到不同的对应位置。比赛的记分根据机器人将物体放置的位置精度和完成时间来决定分值的高低。它模拟了工业自动化过程中自动化物流系统实际工作过程。 关键词:单片机,PWM,光电传感器,运货小车 1.引言 1.1智能搬运小车研究的背景和目的: 运货是各个行业不可或缺的过程,人工运货随着经济的快速发展,不能完全满足市场的需求。世界上许多国家都在积极进行智能车辆的研究和开发设计。移动机器人是机器人学中的一个重要分支,出现于20世纪60年代。当时斯坦福研究院的Nils Nilssen和charles Rosen等人,在1966年至1972年中研制出了取名shakey的自主式移动机器人,目的是将人工智能技术应用在复杂环境下,完成机器人系统的自主推理、规划和控制。从此,移动机器人从无到有,数量不断增多,智能车辆作为移动机器人的一个重要分支也得到越来越多的关注。 智能搬运小车可以安装不同的末端以完成各种不同形状和状态的工件搬运工作,可以广泛应用于机床上下料,冲压机自动化生产线,自动装配流水线,码垛搬运,集装箱等的自动搬运,大大减轻了人类繁重的体力劳动,具有广阔的市场前景。 1.2智能搬运小车的功能介绍: 智能搬运小车希望能够希望得到可以自动抓取货物,循迹行进,自动卸货物的功能。 2.总体方案及论证 2.1系统结构框图:
图1.系统结构框图 2.2具体设计: 整个系统包括单片机控制模块、电机驱动模块、光电传感器模块、机械手模块、模拟电源模块、小车车体。将单片机控制模块,驱动模块固定在小车上端;光电电传感器安装在小车底部;将机械手安装在小车上部的前端. 2.2.1系统布局部分
智能寻迹避障小车寻迹系统设计说明
第二章智能寻迹避障小车寻迹系统设计 1.任务 任务一:产生智能寻迹避障小车沿黑线转圈的控制程序; 任务二:产生智能寻迹避障小车带状态显示沿黑线转圈的控制程序; 2.要求 (1)能控制智能寻迹避障小车沿黑线实现转圈功能; (2)行走过程中小车一直压着黑线走,不得冲出黑线圆圈之外或之; (3)智能寻迹避障小车可以从小于90度的任意方向寻找到黑线圆圈; 2.1 项目描述 该项目的主要容是:在智能寻迹避障小车电机控制系统之上扩展寻迹电路,然后运用C 语言对系统进行编程,使智能寻迹避障小车实现沿黑线转圆圈的功能,并且在行走过程中小车一直压着黑线走,不得冲出黑线圆圈之外或之;当人为将小车拿开,再从小于90度的任意方向放置小车,小车应能重新找回轨道,并沿黑线继续转圈。通过该项目的学习与实践,可以让读者获得如下知识和技能: 继续掌握单片机I/O端口的应用; 掌握红外线收、发对管的工作原理与控制方法; 掌握数码管的工作原理与控制方法; 掌握单片机C语言的编程方法与技巧; 能够编写出智能寻迹避障小车沿黑线实现转圈功能的控制函数; 2.1 必备知识 2.1.1 关于红外线传感器 红外线定义:在光谱中波长自0.76至400微米的一段称为红外线,红外线是不可见光线。所有高于绝对零度(-273.15℃)的物质都可以产生红外线。现代物理学称之为热射线。医用红外线可分为两类:近红外线与远红外线。 红外线发射器:红外线发射管在LED封装行业中主要有三个常用的波段,如下850NM、875NM、940NM。根据波长的特性运用的产品也有很大的差异,850NM波长的主要用于红外线监控设备,875NM主要用于医疗设备,940NM波段的主要用于红外线控制设备。如:红外线遥控器、光电开关、光电计数设备等。 红外线对管应用:本项目中,小车的寻迹功能采用红外线收、发对管实现。具体工作过程如下:两对红外线收、发对管安装在智能寻迹避障小车底盘正前方,红外发射管一直发射信号,接收管时刻准备接收信号。两对对着地的红外管发射红外信号,信号在白色的地面上反射回接收管,通过接收管把信号送回单片机进行处理,完成相应的动作。假如在黑色的地面上,信号被地面吸收,就无信号返回,单片机检测到无信号,根据程序也会做出相应的动作。如图2.1所示为红外线收、发对管外型示意图。
【CN209921366U】物料搬运小车【专利】
(19)中华人民共和国国家知识产权局 (12)实用新型专利 (10)授权公告号 (45)授权公告日 (21)申请号 201920592770.8 (22)申请日 2019.04.27 (73)专利权人 苏州吴江金茂保温材料有限公司 地址 215000 江苏省苏州市吴江区黎里镇 金家坝金贤路 (72)发明人 沈大钧 (74)专利代理机构 苏州创策知识产权代理有限 公司 32322 代理人 董学文 (51)Int.Cl. B62B 3/02(2006.01) B62B 3/04(2006.01) B62B 5/04(2006.01) (54)实用新型名称 物料搬运小车 (57)摘要 本实用新型提供了一种物料搬运小车,包括 小车底座以及与小车底座滑动连接的移动座,小 车底座以及移动座的底部均匀的设置有四组脚 轮,移动座能在驱动机构的作用下靠近或远离小 车底座;移动座的上表面开设有滑槽,小车底座 上设有与滑槽相适配的滑块,移动座通过滑槽和 滑块与小车底座滑动连接;小车底座以及移动座 的边缘安装有用于固定物料的围栏;驱动机构包 括螺纹杆、与螺纹杆相对应的螺纹槽以及用于驱 动螺纹杆旋转的电机;将小车本体设置为滑动连 接的小车底座以及移动座两部分,通过螺纹杆以 及螺纹槽调节两者之间的距离,同时利用可伸缩 的U形围栏对泡沫大板进行固定,结构简单、使用 灵活。权利要求书1页 说明书2页 附图3页CN 209921366 U 2020.01.10 C N 209921366 U
权 利 要 求 书1/1页CN 209921366 U 1.一种物料搬运小车,其特征在于:包括小车底座以及与小车底座滑动连接的移动座,所述小车底座以及移动座的底部均匀的设置有四组脚轮,所述移动座能在驱动机构的作用下靠近或远离所述小车底座; 所述移动座的上表面开设有滑槽,所述小车底座上设有与所述滑槽相适配的滑块,所述移动座通过所述滑槽和滑块与所述小车底座滑动连接;所述小车底座以及所述移动座的边缘安装有用于固定物料的围栏; 所述驱动机构包括螺纹杆以及用于驱动螺纹杆旋转的电机,所述螺纹杆通过轴承安装在所述小车底座靠近所述移动座一侧的侧壁上,所述移动座相对的侧壁上则开设有对应的螺纹槽;所述螺纹杆的一端与所述电机的输出轴固定连接,另一端则与所述螺纹槽螺纹连接。 2.根据权利要求1所述的物料搬运小车,其特征在于:所述围栏整体呈U形设置,包括对称设置的第一围栏和第二围栏,所述第一围栏以及第二围栏分别固定在所述小车底座以及所述移动座的上表面,且两者通过滑杆以及滑杆槽滑动连接。 3.根据权利要求2所述的物料搬运小车,其特征在于:所述围栏上固定有便于推动小车的推杆,所述电机的启动按钮设置在所述推杆上。 4.根据权利要求1所述的物料搬运小车,其特征在于:所述小车底座底部的脚轮上设有刹车。 2
智能小车控制系统设计
智能小车控制系统设计 ——ARM控制模块设计 EasyARM615是一款基于32位ARM处理器,集学习和研发于一体的入门级开发套件,该套件采用Luminary Micro(流明诺瑞)公司生产的Stellaris系列微控制器LM3S615。本系统设计是以EasyARM615开发板为核心,通过灰度传感器检测路面上的黑线,运用PWM直流电机调速技术,完成对小车运动轨迹等一系列的控制。同时利用外扩的液晶显示器显示出各个参数。以达到一个简易的智能小车。 本文叙述了系统的设计原理及方法,讨论了ISR集成开发环境的使用,系统调试过程中出现的问题及解决方法。 据观察,普通的玩具小车一般需要在外加条件下才能按照自己的的设想轨迹去行驶,而目前可借助嵌入式技术让小车无需外加条件便可完成智能化。在小车行驶之前所需作的准备工作是在地面上布好黑线轨迹,设计好的小车便可按此黑线行驶,即为智能小车。其设计流程如下: 1、电机模块 采用由达林顿管组成的H型PWM电路。PWM电路由四个大功率晶体管组成,H桥电路构成,四个晶体管分为两组,交替导通和截止,用单片机控制达林顿管使之工作在开关状态,根据调整输入控制脉冲的占空比,精确调整电机转速。这种电路由于管子工作只在饱和和截止状态下,效率非常没。H型电路使实现转速和方向的控制简单化,且电子开关的速度很快,稳定性也极强,是一种广泛采用的PWM调整技术。 具体电路如下图所示。本电路采用的是基于PWM原理的H型驱动电路。该电路采用TIP132大功率达林顿管,以保证电动机启动瞬间的8安培电流要求。
2、传感器模块 灰度测量模块,是一种能够区分出不同颜色的的电子部件。灰度测量模块是专为机器人设计的灰度传感器。例如:沿着黑色轨迹线行走,不偏离黑色轨迹线;沿着桌面边沿行走,不掉到地上,等等。足球比赛时,识别场地中灰度不同的地面,以便于进行定位。不同的物体对红外线的反射率不同,黑色最低,白色最高;它通过发射红外线并测量红外线被反射的强度来输出反映物体颜色的电压信号,有效距离3-30毫米。 其技术规格如下: 已知灰度传感器的输出电压为0-3.3V,所以可通过ARM615开发板上的ADC 模块转换成数字信号,最后通过不断测试得出黑线与白线的大概参数值,完成对小车传感器部分的设计。 在本次设计中选择二个灰度传感器,其实现效果与布局如下所示。
智能化搬运agv小车在日常生活中的好处
智能化搬运agv小车在日常生活中的好处【派瑞得锂电】无论在在仓库,还是在在工厂车间里面,都需要将原材料、半成品、成品频繁地进行点对点的运送。以前我们一般都依靠叉车和工人来实现搬运,现在AGV 小车逐渐代替叉车+工人的搬运。那么agv小车又是有哪些好处让我们青睐它呢? 1 可靠度 对国外十几家AGV公司27个系列产品所采用的主要导向技术的统计结果显示,比如动进科技AGV公司,电磁感应、惯性导航、光学检测、位置设定、激光检测、图像识别所占比例分别为32.3%、27.8%、16.9%、13.8%、7.69%和1.54%。其中,电磁感应导向技术的应用比例最高,这表明该项技术已经十分成熟。而机器视觉导向技术应用较少,说明该项技术还需要深入研究和不断完善。另外,自主导航技术仍然处在研究阶段,还有许多技术问题需要解决。 2 适应能力
适应能力是指AGV小车运行时所经过地面的整洁程度、空间无障碍程度以及光电干扰程度对导向技术的限制。由于不同的导向技术对应用环境的要求不同,因此,某种导向方法的实际应用有可能受到限制。 对于有线式导向技术,如埋线感应、光学导向和机器视觉等,环境要求主要是地面的平整和清洁程度。除了埋线电磁感应式对地面的清洁程度要求较低外,其他几种方式都要求较高。但电磁和磁带导向方式对地面的平整程度要求较高。 3 路径柔性 由AGV小车组成的物料搬运系统有良好的柔性,但不同的导向技术其路径柔性有很大差别。无线式导向方法可以在很短的时间内改变运行路径,其中有些方法只需改变控制软件实现运行路径的变更。而有线式导向方法的路径柔性相对较差,其中电磁感应埋线导向技术导向路径的变更最困难,成本较高。 4 运行速度 AGV小车的运行速度受导向技术的影响很大,主要取决于对导向路径识别的实时性。所采用的导向技术对路径的识别能力(如检测精确性、实时性和抗干扰性等)直接影响运行速度。有线式导向方法识别路径的速度快、实时性好,而无线式导向方法相对较差。 5 导向稳定程度 导向稳定程度是指为使AGV沿着规定的路线行驶单位时间内进行纠偏转向控制的次数和幅度。由于AGV在运行过程中,受某种因素的影响不可避免地产生偏离运动路径的状态,因此为了保证运行方向必须对车辆进行转向控制,引起车辆沿曲线运动,导致车辆摆动,甚至转向振荡。一般来讲,有线式导向方法对路径的跟踪能力强,行驶稳定性好,AGV沿着规定路线行驶的稳定程度高。
4智能避障小车系统的设计与实现
智能避障小车系统的设计与实现 电子信息工程 200709837 王小龙 罗维薇 摘要 本设计以单片机STC89C52为控制核心,设计实现具有避障和里程显示功能的智能小车。其主要由三部分组成:液晶显示模块、避障模块和电机驱动模块。 智能避障小车分别运用直接反射式红外传感器TCRT5000和霍尔传感器3144来进行路径检测和里程计算,并将实时数据传送到液晶显示模块和单片机分别进行显示和数据处理。并用L298N电机驱动芯片控制小车的运行状态。 Abstract This design based on the single chip computer STC89C52 as control core, design a car with obstacle avoidance and mileage display function. It mainly consists of three parts: the liquid crystal display module, obstacle avoidance module and motor driver module. Intelligence obstacle avoidance car detecting external environment by direct reflex respectively infrared sensor TCRT5000 and hall sensor 3144, transfer the real-time data to LCD module and single chip microcomputer to display respectively and data processing. And use L298N motor drive chip to control the operation status of the car. 一、绪论 1.课题背景介绍 随着单片机技术的迅速发展,其控制能力越来越强大。人们利用单片机强大的控制功能设计出各种各样的系统,全国电子设计大赛几乎每次都有智能小车这方面的题目,全国各高校也都很重视该题目的研究。本设计就是在这样的背景下提出的,设计的智能小车能够通过光电开关完成避障功能,并且可以计算和显示出小车的行驶距离。 2.设计的主要内容 (1)采用STC89C52单片机作为控制小车的核心器件,用收发一体的红外传感器光电TCRT5000来检测和感应外界环境。 (2)用L298N驱动芯片控制电动小车的运行。 (3)用霍尔传感器计算小车行驶的距离并用1602液晶显示器显示。 这种方案能实现对智能小车的运动状态进行实时控制,控制灵活、可靠,可满足对系统的各项要求。 二、系统的总体设计 1.硬件总体设计 以AT89C51单片机为核心的控制电路,采用模块化的设计方案,运用红外光电传感器、霍尔传感器,实现小车在行驶中自动躲避障碍物、测量里程等问题。并将测量数据传送至单片机进行处理,然后由单片机根据所检测的各种数据实现对电动小车的智能化控制。 在本系统中,反射式红外光电传感器检测障碍物,然后将信号传送到单片机系统进行处理,使小车沿轨道自主行走;通过霍尔元件测量小车行驶里程;采用L298N芯片控制电机的转向,实现电动小车的正反向行驶、快慢速行驶及转弯;采用1602液晶显示器显示小车行驶的路程。此系统采用软件方法来解决复杂的硬件电路部分,使系统硬件简洁化,各类功能易于实现,能满足系统的要求,其原理图如图1所示。
作业一+自动导引式物料搬运小车系统设计
哈爾濱工業大學 制造系统自动化大作业 ——自动导引式物料搬运小车系统设计 姓名:刘玉帅 学号:1080810524 班级:0808105 专业:机械设计制造及其自动化 日期:2011.06.15
目录 第一部分设计任务书 (3) 一、自动导引搬运小车功能示意图 (3) 二、基本要求与参数 (3) 三、工作量 (3) 四、设计内容及说明 (3) 第二部分设计说明书 (4) 一、小车轮系结构的设计与分析 (4) 二、自动导引方案的设计及传感器的选择与分析 (6) 三、小车驱动及运动控制方案的设计与分析 (8) 四、控制流程的设计以及控制程序的编写 (8) 参考文献 (11)
作业一 自动导引式物料搬运小车系统设计 第一部分 设计任务书 一、自动导引搬运小车功能示意图 自动导引搬运小车结构示意图 小车运行线路示意图 二、基本要求与参数 本作业要求完成一种自动导引式物料搬运小车系统设计。小车主要实现的功能是自动寻迹并且完成物料的搬运。如上图所示,小车首先在A 区装载物料,然后开始沿着指定轨迹(黑色导引线)自动运行,导引线宽为20mm ,小车上要求装有相应的传感器用来完成寻迹和小车运行轨迹调节,保证小车始终沿着指定轨迹运行不偏离。运行到C 区以后停止,卸货后沿原路径返回A 区再次装载物料,如此往复。A 、C 区各有一条与导引线垂直的黑色边界线,线宽为20mm ,要求小车在A 、C 区停止时,不能超出边界线限定范围。(小车由蓄电池供电) 相关设计参数: (1)小车运动方式:全自动导引式。 (2)小车载重能力:15Kg ,自重不超过15Kg 。 (3)小车运动距离:5000mm 。 (4)小车运行速度:不小于0.5m/s 。 三、工作量 (1)小车轮系结构的设计与分析; (2)自动导引方案的设计及传感器的选择与分析; (3)小车驱动及运动控制方案的设计与分析; (4)控制流程的设计以及控制程序的编写; ( 5)设计说明书一份。
智能小车控制系统开题
毕业设计(论文)开题报告 题目智能小车控制系统研究 系部车辆工程系 专业 学生姓名学号 指导教师职称讲师 毕设地点 2016年1 月16 日
1.结合毕业设计(论文)课题任务情况,根据所查阅的文献资料,撰写1500~2000字左右的文献 综述: 一丶选题背景 智能汽车的概念在上世纪80 年代初由美国提出,随着智能控制算法的不断发展,以及硬件设备的快速更新,对智能车的发展起到了巨大的促进作用。同时交通问题也逐渐成为世界各个国家都要面临的重要问题,这也加快了新技术、新方法的应用。在这样的背景下智能车的研究逐渐成为新的热点。 当前世界公路的总里程每年都在高速增长,同时汽车的总量也在成倍增加,其中我国的增量更是非常明显,随着汽车的越来越多,出现交通事故的概率也在不断提高。世界各国为了解决这方面的问题提出了很多的想法,而智能车是众多想法中最可行的一种解决当前问题的方法。许多国家在无人驾驶汽车和智能交通系统的研究上都取得了不错的成果,有些研究结构已经研制成功了智能车的原型,并进行相关试验。最近10 年在传统汽车中半导体和电子技术应用的越来越多。汽车产业已经进入到了电子时代,智能汽车将是未来的发展趋势。根据相关部门的统计数据,2012 年之后生产的汽车,汽车上电子装置系统占整个汽车总成本超过30%,甚至在一些配置较高的汽车上,比重超过50%。 随着改革开放的不断深入,我国经济在过去的一段时间迅速崛起,人民的生活水平和幸福指数每年都在提高,拥有一辆汽车也不在是一个的梦想,而是变成了一个很多家庭都能消费的起的代步工具,当前我国的汽车数量,每年以两位数增长,然而我国的公共配套却相对落后,这就造成了我国严重的交通问题,道路拥挤十分严重,出现了开车不如骑车快的现象。 因此发展智能车和智能交通系统,是解决现有问题的一种有效的方法,通过不断的研究会在交通拥堵、减少事故方面起到十分显著的作用。未来通过无人驾驶技术,实现汽车的自动行驶,对于我国汽车、控制、电子等领域在新时期提高国际竞争力和自主创新能力有着重要的作用。 智能汽车控制系统的研究是一项复杂的系统工程,其中包含了机械、电子、自动循迹、自适应控制、机器人技术、传感器技术等多学科相互交融的一项研究。智能车通过多个传感器模块的协同工作,经过控制单元进行决策实现汽车的自动行驶、最优化路径等功能。 同时无人驾驶智能车在货运、农业生产、军事等领域具有很好的应用前景。 综上所述,发展智能汽车控制技术能够提高我国在微电子技术、人工智能、电机控制等新技术领域的技术水平。同时随着智能汽车的不断发展也能够有效的改善现有的交
智能避障小车设计--毕业设计完整版-附程序编程
毕业设计设计题目:智能避障小车设计 系别:机电工程系 班级:测控技术与仪器 姓名:XXX 指导教师: XXX
智能小车设计 摘要 随着近年来机器人的智能水平不断提高,其中机器人的感觉传感器种类越来越多,而视觉传感器成为自动行走和驾驶的重要部件。智能小车可应用于无人工厂,仓库,服务机器人等领域解决一些高危环境下的难题。同时单片机技术的迅速发展使得机器人的智能控制更加智能化,人性化。 该设计是利用光电传感器以一定的频率发射红外线来检测障碍物,然后将检测信号发送到STC89C52单片机,并以STC89C52单片机为控制芯片进而电动小汽车的速度及转向,以此实现自动避障的功能。其中小车驱动由L298N驱动电路完成,速度由单片机输出的PWM波调速控制。本设计结构简单,较容易实现,与实际相结合,现实意义很强,但具有高度的智能化、人性化,一定程度体现了智能。 关键词:智能小车; STC89C52单片机; L298N; PWM波
Design Of Smart Car Abstract Along with the robot's intelligent level rises ceaselessly, the types of robot sensory sensor are more and more, and the vision sensor have become the important part in the automatic walking and driving .Smart car can be applied to unmanned factory, warehouse, service robot and etc. to solve some high risk environment problems,At the same time,The rapid development of MCS technology makes the intelligent control of robot more intelligent ang humane. This design uses a photoelectric sensor sending a certain frequency transmitting infrared to detect obstacles, and then sends a detection signal to a STC89C52 MCS. While the car is drived by the L298N circuit, its speed is controlled by the output PWM signal from the STC89C52 MCS.This design is practical ,easy realization and simple in the structure, but highly intelligent, humane, Intelligent in some degree. Key words:Smart Car; STC89C52 MCS; L298N; PWM Signa
智能循迹避障小车方案设计书
封面
作者:PanHongliang 仅供个人学习 目录 摘要………………………………………………………………………………………2 ABSTRACT………………………………………………………………………………
…2 第一章绪论 (3) 1.1智能小车的意义和作用 (3) 1.2智能小车的现状 (3) 第二章方案设计与论证 (4) 2.1 主控系统 (4) 2.2 电机驱动模块 (4) 2.3 循迹模块 (6) 2.4 避障模块 (7) 2.5 机械系统 (7) 2.6电源模块 (8) 第三章硬件设计 (8) 3.1总体设计 (8) 3.2驱动电路 (9) 3.3信号检测模块 (10) 3.4主控电路 (11) 第四章软件设计 (12) 4.1主程序模块 (12) 4.2电机驱动程序 (12) 4.3循迹模
块 (13) 4.4避障模块 (15) 第五章制作安装与调试 (18) 结束语 (18) 致谢……………………………………………………………………………………… 19 参考文献 (19) 智能循迹避障小车 摘要:利用红外对管检测黑线与障碍物,并以STC89C52单片机为控制芯片控制电动小汽车的速度及转向,从而实现自动循迹避障的功能。其中小车驱动由 L298N驱动电路完成,速度由单片机输出的PWM波控制。 关键词:智能小车;STC89C52单片机; L298N;红外对管 Intelligent tracking and obstacle-avoid car Abstract:Based infrared detection of black lines and theroad obstacles, and use a STC89C52 MCU as the controlling core for the speed and direction, A electronic drived, which can automatic track and avoid the obstacle, was designed and fabricated. In which, the car is drived by the L298N circuit, its speed is controlled by the output PWM signal from the STC89C52. Keywords: Smart Car。STC89C52 MCU。L298N。Infrared Emitting Diode 第一章绪论 1.1智能小车的意义和作用 自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防等领域。近年来机器人的智能水平不断提高,并且迅速地改变着人们的生活方式。人们在不断探讨、改造、认识自然的过程中,制造能替代人劳动的机器一直是人类的梦想。 随着科学技术的发展,机器人的感觉传感器种类越来越多,其中视觉传感器成为自动行走和驾驶的重要部件。视觉的典型应用领域为自主式智能导航系统,对于视觉的各种技术而言图像处理技术已相当发达,而基于图像的理解技术还很落后,机器视觉需要通过大量的运算也只能识别一些结构化环境简单的目标。视
智能物料搬运小车的设计
开发研究 智能物料搬运小车的设计 戴本尧 (浙江工贸职业技术学院,浙江温州325003) 摘要:针对现有物流存在的问题,设计了一款气动剪叉机构与悬挂式摆臂结合的智能物流搬运小车,具有成本低、环保性能好、适用性强、控制性能高的特点,可广泛用于物流、仓储、搬运。 关键词:智能;搬运;小车 随着互联网时代的到来,快递作为物流行业的一个浓缩版,是将物流中零散的快递,进行精准派送的一个过程。目前,国内快递流水线中自动分拣系统比较成熟,但是快递物品从自动分拣系统到物品仓储环节中,如何将物品搬运至货架,还存在一个自动化程度不高,技术相对薄弱的关节点。国外部分物流企业采用了仓储物流机器人或者搬运机器人,但是设备或系统的总体价格非常昂贵,对于大多数物流企业是不适用的。因此,研究和设计1台适用性强、设备成本低、自动化程度高的自动化搬运小车,用于快递流水线系统中物品的分拣、仓储和搬运等工作,能够有效减少快递行业的人力物力财力的消耗,具有非常重要的现实意义。1智能物料搬运小车的设计 设计了一款自动化物品搬运小车。主要结构由剪叉机构、工作台、工作台转向机构、机械手气压夹紧机构、机械手托举机构、小车车轮等组成。可以夹紧和提升物品到工作台,然后再实现小车搬运至指定位置,最后放下物料,通过剪叉机构实现离地2m高度工作区间;小车可以实现遥控或者自动化搬运,可广泛用于物流、仓储等。 1.1小车后轮驱动装置设计 快递物品从自动化分拣输送台搬运至货架,需要小车驱动到达货架指定位置,就需要设计1套驱动装置。最简便的后轮驱动,沿导轨直行。后轮驱动动力选择电动,传动方式可以有链式、齿轮传动和带轮传动等;考虑小车移动过程需要精确定位和制动,本设计后轮驱动装置采用伺服电机驱动、同步带轮传动、驱动后轮转动。 1.2小车前轮转向装置设计 快递物品从自动化分拣输送台搬运至货架,无需涉及转向;因此,前轮转向就直接安装了定轮;如果是无线遥控,就需要安装转向轮系统;按转向力能源的不同,可将转向系分为机械转向系和动力转向系。 1.3小车升降机构设计 自动化物品蘇小车要举升物体到2m高度,必须借助剪升机构。该机构MW帥紧凑、稳定側、轉能力高和操控性好等特点。因此在起重运输、物料搬运、仓储、自动炮设备的制造与W1中均可以得到 1.4小车工作台转向机构和夹紧机构设计 自动化分拣设备将快递物品分流输送过来后,需要将快递物品从输送台搬运到货架指定位置,这时候就需要用到自动化物品运输小车。在工作中,要用到机械手去抓物品,然后放置到工作台,再由小车行驶到指定货架前,由举升机指定到货架高度位置,拖岀物品到货架上的过程。需要设计气动夹紧机构和工作台的转向机构。 转向机构一般由电机带动,考虑经济性和实用性原则,本设计采用汽缸推动直齿轮,直齿轮带动圆柱齿轮转动,接着由圆柱齿轮带动整个工作台转动的过程。该结构具有结构简单、转动精准、控制方便和经济实用等特点。 为了实现夹紧行程的可调整性,首先在固定汽缸的板上做了滑道,可以依据用户需求,方便调整夹紧机构行程;其次,夹紧面做了相应防滑处理;最后,控制方面来说,可以在夹紧面上安装压力传感器和气动溢流阀,调整汽缸输出速度和输出力。 由于该丝杠托举机构悬挂在工作台导轨两侧,能够前后摆动。在承受重物后,具有较大后倾力矩,为此,在工作台增加了2个汽缸做为支撑。为了实现小车工作台丝杠托举机构执行动作时,不发生前后大的倾斜,将机构设置成了具有一定摆动幅度,安装了限位开关,实现柔性调节丝杆和地面的垂直度。 2产品实物及创新点 2.1产品实物 根据上述设计,加工 装配后,产品如图1所示: 2.2创新点 本产品创新点体现 在:实现了气动剪叉机构 零的突破,采用悬挂式摆图1智能物料搬运小车实物图 臂工作,通过汽缸和限位开关共同稳定的托举构造,以压缩空气为动力源,各执行机构采用气动方式控制和执行,节能环保。 3结束语 本产品针对物流快递行业存在的问题,设计了一种节能环保可靠的智能物料搬运小车,具有成本低、环保性能好、适用性强、控制性能高的特点,可广泛用于物流、仓储、搬运。参考文献: [1]虞和谦.中国物料搬运技术的现状与发展[J].中国机械工程.1995(01):14-17. ⑵孙欣.物料搬运的发展[Jh煤炭技术.1997(02):26. 基金项目:浙江省教育厅一般项目:快递行业仓储环节的智能搬运小车的研发,编号:Y201840750。 (收稿日期:2019-03-20) 《湖北农机化》2049年第40 期