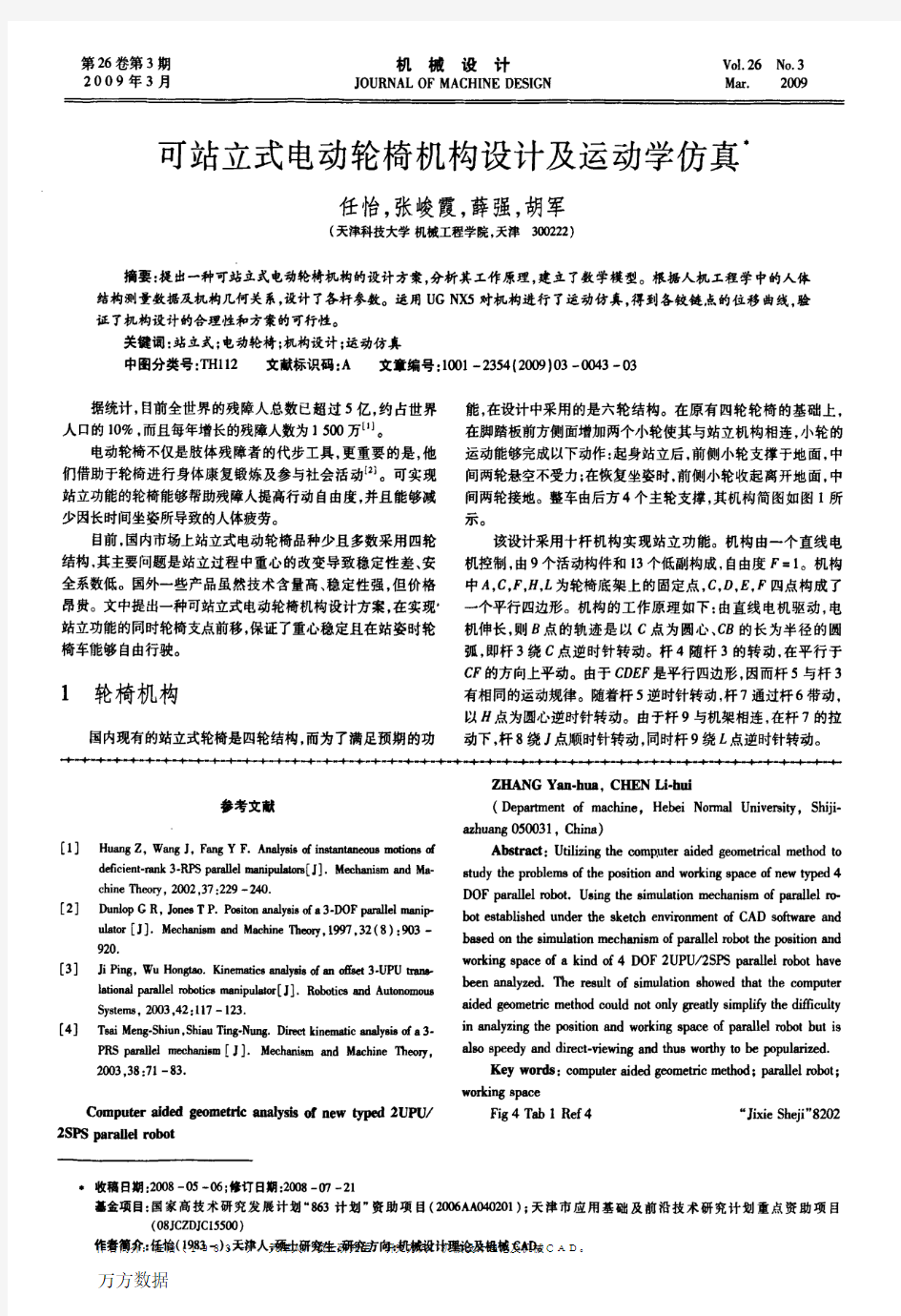
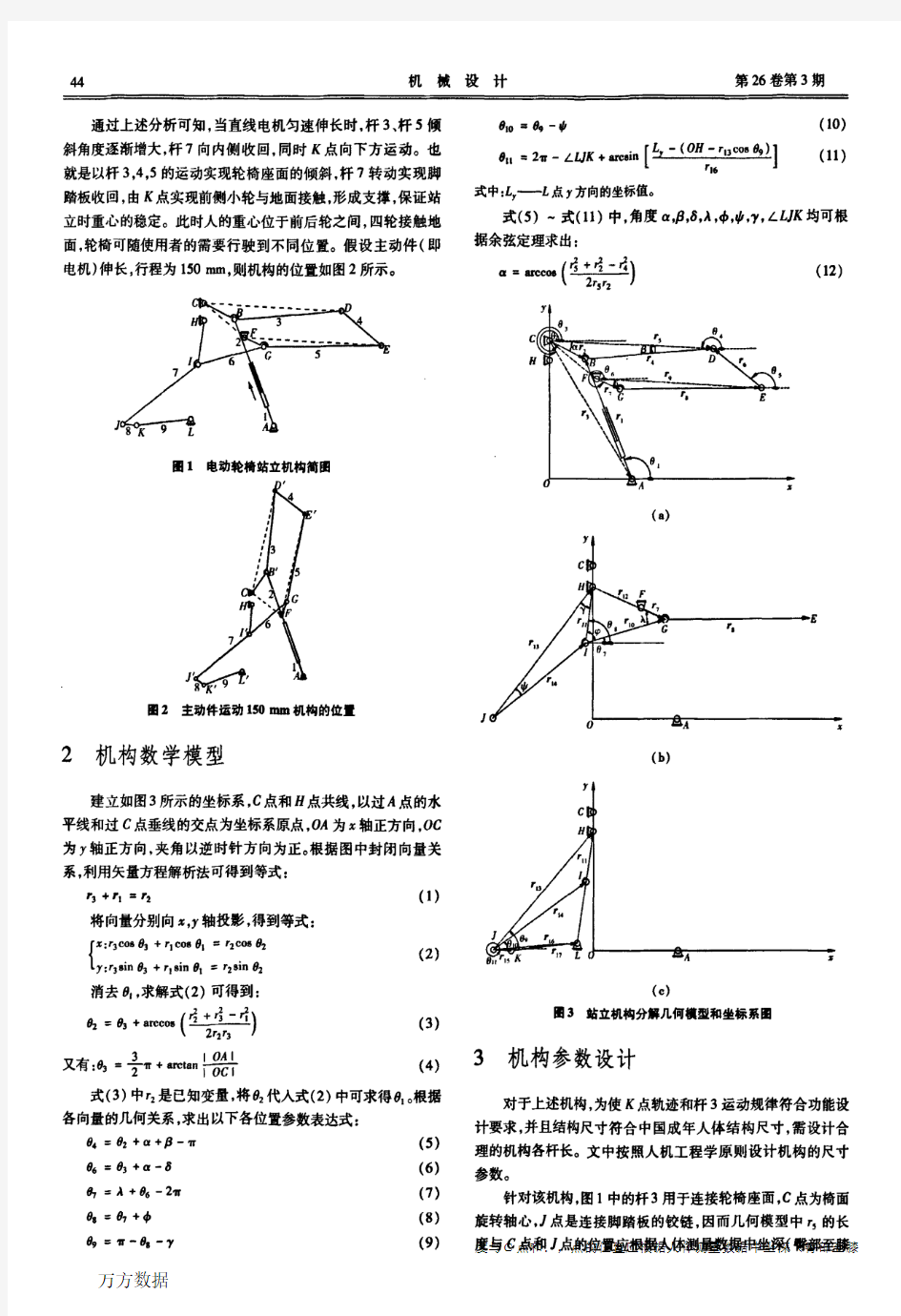
可站立式电动轮椅机构设计及运动学仿真
万方数据
万方数据
万方数据
可站立式电动轮椅机构设计及运动学仿真
作者:任怡, 张峻霞, 薛强, 胡军, REN Yi, ZHANG Jun-xia, XUE Qiang, HU Jun
作者单位:天津科技大学,机械工程学院,天津,300222
刊名:
机械设计
英文刊名:JOURNAL OF MACHINE DESIGN
年,卷(期):2009,26(3)
被引用次数:0次
参考文献(4条)
1.张锡玉轮椅舒适性研究及脑瘫患者专用轮椅的设计 2006
2.刘云.王艾伦一种新型可卧立电动轮椅的研制与设计[期刊论文]-机械与电子 2007(10)
3.国家质量技术监督局GB 10000-1988.中国成年人人体尺寸国家标准
4.丁玉兰人机工程学 2005
相似文献(1条)
1.期刊论文赵亮专利侵权屡忍耐维权无获心难平——访中国站立式电动代步车专利持有人谢寿椿-中国发明与专
利2010(6)
谢寿椿,1935年生于浙江杭州.20世纪50年代毕业于清华大学,高级工程师,一生从事机械制造和汽车、摩托车设计、运用及维修的教学科研中在我国工业设计行业尤为知名.曾18此获得省部级嘉奖,连续两届当选兰州市安宁区人大代表.退休后,仍被业界多家中外知名企业竞相争聘.向来爱好机械设计的谢寿椿,闲暇中研发的新型电动代步车、电动轮椅、电动跑车等.已取得国家知识产权局颁发的四个中国实用新型专利及美国专利与商标局(USPTO)颁发的美国发明专利证书(US7.192.040B2).
本文链接:https://www.360docs.net/doc/3e5564950.html,/Periodical_jxsj200903014.aspx
下载时间:2011年2月15日
平衡吊的动力学与运动学仿真
平衡吊的运动学与动力学仿真 作者:** 指导老师:** ********** *************** 1 绪论 1.1 平衡吊的概要平衡吊是的主要结构是平行四边形连杆机构的放大形态和螺母升降结构,通过外力的作用下达到重物的上升和下降的目的,平衡吊可以满足重物随时停留在需要的工作区域。比其他的吊装设备更具有优越性,它比一般吊装设备更加的灵活,从而更加的精准,与机械手相比等其他吊装设备比,其结构更加得合理,性能较好,广泛的使用于重工业的生产中,在机床厂中更是被用作吊装作业,在小型企业装卸货物,例如码头的施工,集装箱的搬运,非常适合于作业区域窄,时间间隔短的作业方式。其极大减少了人力使用,有效地节约了人力资源。平衡吊在市场上主要常见的有3 种,机械式,气动式,液压式,机械式,顾名思义,通过外力的使用,使其达到升降的目的,主要在生产,搬运的的领域中常见,后期,更是添加了电动装置,优化了他的配置,有效地提高了生产效率。气动式平衡吊主要是对于气压的控制原理实现升降功能的我们成为气动式平衡吊,液压式,主要是根据液压系统来设置的,在大多数重工业生产地使用广泛。现在主要使用的为气动式平衡吊,主要省力,都是自动化进行的,按照平衡吊臂的类型还可以将平衡吊分为通用和专用类型,他们各有各的特色,相对于大型的吊车来说,其缺点是工作的行程围较小,区域局限化。 平衡吊的种类及其特点:液压平衡吊的特点:液压平衡吊有3 大类,有级,单级,无级变速的,他们通过不同的油路控制来达到不同的工作地点; 气动平衡吊的特点:体积不大,比一般的平衡吊具有灵活的特色;电动平衡吊:又称为机械式平衡吊,具有控制重物在任意指定地点的特点,一般为定速转动; Cad(2D)+solidworks(3D) 图纸整套免费获取,需要的 加QQ1162401387 1.2 平衡吊的结构 平衡吊主要有大小臂,起重臂,短臂,电机,立柱,丝杆螺母传动副构成的,其中的几个臂件通过平行四边形连杆机构构成的。在外力的作用下起到升降重物的作用。
机构运动仿真基本知识
机构仿真是PROE的功能模块之一。PROE能做的仿真内容还算比较好,不过用好的兄弟不多。当然真正专做仿真分析的兄弟,估计都用Ansys去了。但是,Ansys研究起来可比PROE麻烦多了。所以,学会PROE的仿真,在很多时候还是有用的。我再发一份学习笔记,并整理一下,当个基础教程吧。希望能对学习 仿真的兄弟有所帮助。 术语 创建机构前,应熟悉下列术语在PROE中的定义:主体(Body) - 一个元件或彼此无相对运动的一组元件,主体内DOF=0。 连接(Connections) - 定义并约束相对运动的主体之间的关系。 自由度(Degrees of Freedom) - 允许的机械系统运动。连接的作用是约束主体之间的相对运动,减少系统可能的总自由度。 拖动(Dragging) - 在屏幕上用鼠标拾取并移动机构。 动态(Dynamics) - 研究机构在受力后的运动。 执行电动机(Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。 齿轮副连接(Gear Pair Connection) - 应用到两连接轴的速度约束。 基础(Ground) - 不移动的主体。其它主体相对于基础运动。 机构(Joints) - 特定的连接类型(例如销钉机构、滑块机构和球机构)。 运动(Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。 环连接(Loop Connection) - 添加到运动环中的最后一个连接。 运动(Motion) - 主体受电动机或负荷作用时的移动方式。 放置约束(Placement Constraint) - 组件中放置元件并限制该元件在组件中运动 的图元。 回放(Playback) - 记录并重放分析运行的结果。 伺服电动机(Servo Motor) - 定义一个主体相对于另一个主体运动的方式。可在机构或几何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。LCS - 与主体相关的局部坐标系。LCS 是与主体中定义的第一个零件相关的缺 省坐标系。 UCS - 用户坐标系。 WCS - 全局坐标系。组件的全局坐标系,它包括用于组件及该组件内所有主体 的全局坐标系。 运动分析的定义 在满足伺服电动机轮廓和机构连接、凸轮从动机构、槽从动机构或齿轮副连接的要求的情况下,模拟机构的运动。运动分析不考虑受力,它模拟除质量和力之外的运动的所有方面。因此,运动分析不能使用执行电动机,也不必为机构指定质量属性。运动分析忽略模型中的所有动态图元,如弹簧、阻尼器、重力、力/力矩以及执行电动机等,所有动态图元都不影响运动分析结果。
电动轮椅车设计.
电动轮椅车设计 ee (ee) 指导教师:ee [摘要]:文中首先分析了国内外各种轮椅的状况,在对比总结各自优缺点的基础上,由于直流电机的额定输出转矩较低,不足以驱动后轮克服地面摩擦阻力传动,根据国内实际情况,提出了一种含有机械传动减速机构的电动轮椅,基于这种方案,设计了与之相匹配的减速器及其他传动机构,该方案采用直流电机经减速器与链条连接到后轴,以减低输出转速,增大输出转矩。应用现代设计理论及方法、对驱动方式进行分析和再设计,优化车身骨架结构,添加必要的辅助功能装置,利用计算机辅助设计软件构建轮椅及各零部件三维模型,为新型低成本电动轮椅的设计开发打下了一定基础,提供了一种供参考的驱动方案和骨架结构。 [关键字]:电动轮椅;设计;机械系统;
The design of electric wheelchair ee (ee) Tutor : ee Abstract:This paper first analyzes the domestic and foreign various wheelchair status, based on comparing the advantages and disadvantages, because the rated output torque DC motor is low, not enough to drive the rear wheel to overcome the ground friction transmission, according to the actual situation, proposed the electric wheelchair with a mechanical reduction gear mechanism, based on this driving scheme, design of the reducer and other transmission mechanism is matched, the DC motor through reducer and the chain is connected to the rear axle, so as to reduce the output rotation speed, increase the output torque. Use the modern mechanical design theory and method, analyze and re-design the drive mode. Optimize the body frame structure. And add some necessary accessibility devices. Use computer aided design software to build a three-dimensional model of the wheelchair an d it’s components. This design of the electric wheelchair’s mechanical systems has lay a certain foundation for the new type low-cost electric wheelchair and has given a reference scheme about drive mode and body frame structure. Keywords: wheelchair; design; mechanical system
机构运动创新设计..
课程设计报告 学生姓名:________________ 学号:_________________ 学院: ______________________________________________ 班级: ______________________________________________ 题目: _______________ 机构运动创新设计______________
2015年1月5日 目录 、概述................................. 1 .....................................................
一、概述: 机构运动方案创新设计是各类复杂机械设计中决定性的一步,机构的设计选型一般先通过作图和计算来进行,一般比较复杂的机构都有多个方案,需要制作模型来试验和验证,多次改进后才能得到最佳的方案和参数。本实验所用搭接试验台能够任意选择平面机构类型,组装调整机构尺寸等功能,能够比较直观、方便的搭接、验证、调试、改进、确定设计方案,较好地改善了在校学生对平面机构的学习和设计一般只停留在理论设计“纸上谈兵”的状况二、课程设计目的: 1、培养学生对连杆机构的理解掌握与创新设计能力,加强学生的工程实践背景的训练,拓宽学生的知识面,培养学生的创新意识、综合设计及工程实践动手能力。 2 、通过机构的拼接,在培养工程实践动手能力的同时,要求学生在拼装一个已有模型之外,自己通过对现实生产和生活中的连杆机构机械产品的观察和理解,通过试验台设备进行拼装和仿真。通过解决实际问题,促进学生理论联系实际,学以致用;锻炼学生独立思考能力和动手能力。 3 、加深学生对连杆机构组成原理的认识,进一步掌握连杆机构的创新设计方法。 4、学习机构运动简图的测绘与自由度的计算。 三、课程设计要求和内容: 实验设备和工具 CQJP-D 机构运动创新设计方案拼装及仿真实验台,包括组成机构的各种运动副、构件、动力源及一套实验工具(扳手、螺丝刀)。其中构件包括机架、连杆、圆柱齿轮、齿条、凸轮及从动件、槽轮及拨盘和皮带轮等;运动副包括转动副、移动副、齿轮副、槽轮副等。 实验原理 平面机构是由各个杆组依次联结到机架和原动件上形成的。机构具有确定运动的条件是机构的自由度大于零,且原动件数和机构的自由度相等。所拼接的机构必须满足以上两个条件。将主要由连杆构成的连杆机构(可加入一个其他类型构件如齿轮、凸轮、槽轮等)进行拼装,计算分析其自由度后,输入动力源进行 机构运行。实验内容与步骤
基于MatlabSimulink的槽轮机构间歇运动特性的分析与仿真
基于Matlab/Simulink的槽轮机构间歇运动特性的分析与仿真 摘要:将槽轮机构转换为倒置曲柄滑块机构,建立了槽轮机构的运动数学模型,利用Matlab计算了槽轮机构的运动参数并绘制了相应的动态曲线,该方法直观精确,提高了设计效率。 关键词:槽轮机构间歇运动Matlab/Simulink 运动特性 Geneva mechanism based on Matlab/Simulink intermittent motion characteristics analysis and simulation Abstract :Converse geneva mechanism for inverted slider-crank mechanism,the geneva machanism motion mathematical model is established,using Matlab to calculate the dynamic movement parameters of the geneva mechanism and draw the corresponding curve,the method is accurate,intuitive improves the design efficiency Key words:the geneva mechanism intermittent motion Matlab / Simulink movement characteristics 0引言: 槽轮机构能将主动件连续旋转运动转换成从动件有规律的运动和停歇,是实现周期性运动和停歇的典型机构。槽轮机构的结构简单,外形尺寸小,效率高,并能较平稳地、间歇地进行传位,在现代机械设备中得到了广泛的应用,但因传动时尚存在柔性冲击,故常用于速度不高的场合。本文将针对槽轮机构的间歇运动,使用Matlab软件中的仿真工具箱Simulink进行运动学仿真,通过仿真得到从槽轮的运动变化曲线,并对槽轮机构的运动特性进行分析。 1槽轮机构的物理模型转换 图1 外槽轮机构简图图2 曲柄滑块机构 1-槽轮;2-拨盘1-滑块;2-曲柄;3-摇杆 在如图1所示为外槽轮机构简图,图2所示为倒置的曲柄滑块机构。当销子和轮槽结合时图2中倒置曲柄滑块构造形式与图1中槽轮机构类似。其中图1中带销子的拨盘2可视为连杆2,而槽轮可视为连杆3,滑块1代表销子。 2槽轮机构的数学建模 整个系统的运动过程可分为两个状态,即销子和轮槽结合与分离的两个状态
典型环节动态特性的仿真
院系电子信息工程学院班级姓名学号 实训名称典型环节动态特性的仿真实训日期 一、实训目的 1、掌握典型环节仿真结构图的建立方法; 2、通过观察典型环节在单位阶跃信号作用下的动态特性,熟悉各种典型环节的响应曲线。 2、定性了解各参数变化对典型环节动态特性的影响。 3、初步了解MATLAB中SIMULINK 的使用方法。 二、实训内容 掌握比例、积分、一阶惯性、实际微分、振荡环节的动态特性。 [例] 观察实际微分环节的动态特性 (1)连接系统, 如图所示: (2)参数设置: 用鼠标双击阶跃信号输入模块,设置信号的初值和终值,采样时间sample time 和阶跃 时间step time;用鼠标双击实际微分环节,设Kd=1,Td=1;用鼠标双击示波器,设置合适的示波器参数; (3)在simulation/paramater中将仿真时间(Stop Time )设置为10秒; (4)仿真:simulation/start,仿真结果如图1-1所示; (5)改变Td、Kd,观察仿真结果有什么变化。 图1-1 实际微分环节的动态特性图 第 1 页共 7 页指导教师签名
院系电子信息工程学院班级姓名学号 实训名称典型环节动态特性的仿真实训日期 ①惯性环节 建立如下图1所示的仿真结构图,K值为1,并保持不变;T值依次为1,2和3,运行得到阶跃响应曲线(图2): 图1 惯性环节仿真结构图 T值不同 图2 惯性环节T值不同的阶跃响应曲线 建立如下图2所示的仿真结构图,T值为1,并保持不变;K值依次为1,2和3,运行得到阶跃响应曲线(图3): 图3 惯性环节仿真结构图 K值不同 第 2 页共 7 页指导教师签名
电动轮椅车注册技术审查指导原则
国药监总局2017年第180号附件2 电动轮椅车注册技术审查指导原则 本指导原则旨在指导注册申请人对电动轮椅车注册申报资料的准备及撰写,同时也为技术审评部门审评注册申报资料提供参考。 本指导原则是对电动轮椅车的一般要求,申请人应依据产品的具体特性确定其中内容是否适用,若不适用,需具体阐述理由及相应的科学依据,并依据产品的具体特性对注册申报资料的内容进行充实和细化。 本指导原则是供申请人和审查人员使用的指导文件,不涉及注册审批等行政事项,亦不作为法规强制执行,若有能够满足法规要求的其他方法,也可以采用,但应提供详细的研究资料和验证资料。应在遵循相关法规的前提下使用本指导原则。 本指导原则是根据现行法规、标准体系及当前认知水平下制定,随着法规、标准体系的不断完善和科学技术的不断发展,本指导原则相关内容也将适时进行调整。 一、适用范围 本指导原则的适用范围为第二类医用电动轮椅车,是可由乘坐者或护理者操作的、由电机驱动、能电动控制速度、可使用手动或动力转向的供残障者使用的带有座椅支撑的轮式个人移动装置。 本指导原则适用于仅乘载1人且使用者质量不超过100 kg —1—
残疾或无完全行走能力者使用的、由电能驱动的各种电动轮椅车。 本指导原则不适用于承重超过100kg的电动轮椅车,但可参考ISO 7176系列标准及本指导原则进行技术审查。本指导原则不适用于由电力助动的手动轮椅车和电动代步车。 二、技术审查要点 (一)产品名称要求 产品的命名应符合《医疗器械通用名称命名规则》(国家食品药品监督管理总局令第19号)和国家标准、行业标准中的通用名称要求,例如:电动轮椅车、电动轮椅、室外型电动轮椅车。电动轮椅车设计图和样品图如图1和图2所示。 图1 电动轮椅车设计图 —2—
平衡吊的动力学与运动学仿真
平衡吊得运动学与动力学仿真 作者:** 指导老师:** ********** *************** 1绪论 1、1平衡吊得概要 平衡吊就是得主要结构就是平行四边形连杆机构得放大形态与螺母升降结构,通过外力得作用下达到重物得上升与下降得目得,平衡吊可以满足重物随时停留在需要得工作区域内。比其她得吊装设备更具有优越性,它比一般吊装设备更加得灵活,从而更加得精准,与机械手相比等其她吊装设备比,其结构更加得合理,性能较好,广泛得使用于重工业得生产中,在机床厂中更就是被用作吊装作业,在小型企业装卸货物,例如码头得施工,集装箱得搬运,非常适合于作业区域窄,时间间隔短得作业方式。其极大减少了人力使用,有效地节约了人力资源。 平衡吊在市场上主要常见得有3种,机械式,气动式,液压式,机械式,顾名思义,通过外力得使用,使其达到升降得目得,主要在生产,搬运得得领域中常见,后期,更就是添加了电动装置,优化了她得配置,有效地提高了生产效率。气动式平衡吊主要就是对于气压得控制原理实现升降功能得我们成为气动式平衡吊,液压式,主要就是根据液压系统来设置得,在大多数重工业生产地使用广泛。现在主要使用得为气动式平衡吊,主要省力,都就是自动化进行得,按照平衡吊臂得类型还可以将平衡吊分为通用与专用类型,她们各有各得特色,相对于大型得吊车来说,其缺点就是工作得行程范围较小,区域局限化。 平衡吊得种类及其特点: 液压平衡吊得特点:液压平衡吊有3大类,有级,单级,无级变速得,她们通过不同得油路控制来达到不同得工作地点; 气动平衡吊得特点:体积不大,比一般得平衡吊具有灵活得特色; 电动平衡吊:又称为机械式平衡吊,具有控制重物在任意指定地点得特点,一般为定速转动; Cad(2D)+solidworks(3D)图纸整套免费获取,需要得 加QQ1162401387 1、2平衡吊得结构 平衡吊主要有大小臂,起重臂,短臂,电机,立柱,丝杆螺母传动副构成得,其中得几个臂件通过平行四边形连杆机构构成得。在外力得作用下起到升降重物得作用。
槽轮机构运动学仿真
湖南农业大学工学院 课程设计说明书 课程名称:机械CAD/CAM课程设计 题目名称:槽轮机构运动学仿真 班级:20 11 级机制专业四班 姓名: 学号: 指导教师: 评定成绩: 教师评语: 指导老师签名: 20 年月日
目录 摘要 (1) 关键词 (1) 1 槽轮机构的结构组成和工作原理 (1) 2 零件三维实体模型建立的方法 (1) 2.1 主动转盘三维实体模型建立的方法 (1) 2.2 从动槽轮三维实体模型建立的方法 (3) 2.3 其他零件三维实体模型建立的方法 (4) 3 装配模型建立的方法和步骤 (6) 4 建立装配模型的运动仿真 (9) 5 装配模型的运动仿真分析 (13) 6 装配模型的运动仿真分析结论 (15) 7 装配模型图集 (16) 7.1 总成图 (16) 7.2 爆炸图 (16) 7.3 零件图 (17) 7.4 主动转盘工程图 (18) 8 总结 (19) 参考文献.......................................... (19)
槽轮机构运动学仿真 学生: (工学院,11-机制4班,学号) 摘要:槽轮机构是将主动拨盘的连续转动转化为从动槽轮的间歇转动,以达到间歇进给、转位和分度等工作要求。运用Pro/E软件对槽轮机构进行三维实体建模及装配,并运用模块进行运动仿真分析,得出机构的角速度、角加速度随时间变化的曲线。 关键词:槽轮机构;间歇运动;运动仿真 1、槽轮机构的结构组成和工作原理 槽轮机构由槽轮和圆柱销组成的单向间歇运动机构,又称马尔他机构。它常被用来将主动件的连续转动转换成从动件的带有停歇的单向周期性转动。槽轮机构有外啮合和内啮合以及球面槽轮等。外啮合槽轮机构的槽轮和转臂转向相反,而内啮合则相同,球面槽轮可在两相交轴之间进行间歇传动。槽轮机构典型结构由主动转盘、从动槽轮和机架组成。 2、零件三维实体模型建立的方法 2.1、主动转盘三维实体模型建立的方法 ②选择模板
常用机构的运动仿真(20个例程)
常用机构的运动仿真 一名资深机构设计师的话: 机构设计是机械设计中的灵魂,一种独特、新颖的机构设计体现了设计者的智慧与创新的精神。谁掌握、了解的机构越多,在研发设计新产品时就越主动,越有办法。 但是,熟练的掌握各种机构的设计并非易事,并非一日之功。它又是一种“隐性知识”,不是刚刚毕业就可以掌握的知识。需要日积月累,不断从实践、生活中学习,结合理论不断的总结,才能逐步地掌握。 但对于那些刚刚从事机械设计的人,才走上机械设计岗位的人,是否有一条稍微快捷的办法呢?我想尝试下面所述的方法:利用三维软件的运动仿真技术,把在实践中用到的、见到的以及在书本上学到的,常用的机构,绘制成三维模型仿真运动,让那些枯燥的平面图形变成实物一样的机构模型,并让他“动”起来,像看动画片一样。轻松地、在较短的时间里了解各种机构的运动原理,并大大地加深印象和记忆,用这样的办法来“缩短”掌握机构的时间。在老师的帮助下,首先完成了下面几个常用机构的仿真运动并作了简单的说明,方法是否可行?等候读者的消息。
20个常用机构的运动仿真案例 1、风扇摇头机构 图1是风扇摇头机构的原理模型。该机构把电机的转动转变成扇叶的摆动。红色的曲柄与蜗轮固接,蓝色杆为机架,绿色的连架杆与蜗杆(电机轴)固接。电机带扇叶转动,蜗杆驱动蜗轮旋转,蜗轮带动曲柄作平面运动,而完成风扇的摇头(摆动)运动。机构中使用了蜗轮蜗杆传动,目的是降低扇叶的摆动速度、模拟自然风。 图 1 风扇摇头机构 2、用摆动扇形齿轮实现间接送料机构 图2 是一个曲柄摇杆机构。绿色的可调曲柄可作整周旋转。并驱动扇形齿轮(摇杆)摆动,扇形齿轮又使蓝色小齿轮正反转动,若小齿轮与电磁离合器或超越离合器结合可完成间歇转动,可完成间断送料。 图 2 摆动扇形齿轮机构
电动轮椅营销策划
电 动 轮 椅 产 品 策 划 书 组员:刘建25 贺凡艳32 张爱33 蒋艳云38
目录 一、摘要 (3) 二、产品介绍 (3) 三、市场分析 (4) 1、市场环境分析 (4) (1)市场现有产品状况 (4) (2)价格分布状况 (4) (3)销售渠道 (4) 2、消费者分析 (4) (1)顾客需求状况 (4) (2)市场产品类型 (5) 四、市场定位 (5) 1.目标顾客的需求 (5) 2.产品形象定位 (5)
一、摘要 据统计,1987年我国轮椅车年产量仅3300辆,到1986年底,仅民政系统全年生产的各种轮椅车已达到12000辆。到2005年我国各种轮椅车的年产量160万辆以上,轮椅产量增长十分快速,目前我国轮椅行业企业已经达到200万多辆的生产能力。 我国轮椅车生产企业主要生产的轮椅车大致上分为两大类:手动轮椅车和电动轮椅车及电动代步车。其中以手动轮椅车产量占大部分份额。电动轮椅车及电动代步车在国内的市场还处于成长阶段,目前市场的消费量还不是很高,主要的消费群体是大中型城市的高档消费家庭和一些医疗机构、企事业单位。大部分生产出来的电动轮椅车以及电动代步车均出口到国外,主要出口到欧洲、美洲、澳洲、日本等地区,少量的出口到中东、东南亚、非洲等地区。美国是我国电动轮椅车及电动代步车的最大出口国家,无论是我国大陆还是我国台湾地区,对美国的出口比重相比其他国家要高的多。 长沙恒润机械有限责任公司位于湖南省长沙市高新技术开发区麓谷工业园,是一家具有自主知识产权生产电动轮椅车及老年用品的专业生产厂家。公司的电动轮椅品牌名称为“开福乐”,寓意:开心、幸福、快乐。 现在市场上排名前十的电动轮椅品牌有:互邦、鱼跃、三贵、凯洋、佛山、上奥、生力、海波、松永、方太。所以说电动轮椅市场已经初步成熟,要想在这个市场上再分一杯羹就得做出自己的特色。下面是针对电动轮椅市场做的一个产品定位分析。 二、产品介绍 公司目前提供普通型、经济型、可躺型、可立可躺型、多功能型等各种电动轮椅,电动医疗护理床等医疗辅助产品。性能安全可靠,具有自主知识产权,其中电动轮椅配备了微电脑智能控制器,具有无级调速、刹车断电、欠压和限流保护、电池电量显示、手动、电动两用,助力等功能。其中主要的核心产品是一款KFL58的可立可躺电动轮椅,它是国内第一个获得健身型电动轮椅专利的,这是我们公司的最大特色产品。不同产品针对的消费者目标不同,价格不同,实行差异化定位。
机构运动创新设计..
课程设计报告 学生姓名:学号: 学院: 班级: 题目: 机构运动创新设计 指导教师:苏天一 2015 年 1 月5日
目录 一、概述 1 二、课程设计目的 1 三、课程设计要求和内容 1 四、原始数据及技术参数 2 五、设计原理及设备 2 六、机构自由度计算 5 七、机构动力分析与计算 7 八、机构运动分析与计算 9 十、参考文献 12
一、概述: 机构运动方案创新设计是各类复杂机械设计中决定性的一步,机构的设计选型一般先通过作图和计算来进行,一般比较复杂的机构都有多个方案,需要制作模型来试验和验证,多次改进后才能得到最佳的方案和参数。本实验所用搭接试验台能够任意选择平面机构类型,组装调整机构尺寸等功能,能够比较直观、方便的搭接、验证、调试、改进、确定设计方案,较好地改善了在校学生对平面机构的学习和设计一般只停留在理论设计“纸上谈兵”的状况 二、课程设计目的: 1、培养学生对连杆机构的理解掌握与创新设计能力,加强学生的工程实践背景的训练,拓宽学生的知识面,培养学生的创新意识、综合设计及工程实践动手能力。 2、通过机构的拼接,在培养工程实践动手能力的同时,要求学生在拼装一个已有模型之外,自己通过对现实生产和生活中的连杆机构机械产品的观察和理解,通过试验台设备进行拼装和仿真。通过解决实际问题,促进学生理论联系实际,学以致用;锻炼学生独立思考能力和动手能力。 3、加深学生对连杆机构组成原理的认识,进一步掌握连杆机构的创新设计方法。 4、学习机构运动简图的测绘与自由度的计算。 三、课程设计要求和内容: 实验设备和工具 CQJP-D机构运动创新设计方案拼装及仿真实验台,包括组成机构的各种运动副、构件、动力源及一套实验工具(扳手、螺丝刀)。其中构件包括机架、连杆、圆柱齿轮、齿条、凸轮及从动件、槽轮及拨盘和皮带轮等;运动副包括转动副、移动副、齿轮副、槽轮副等。 实验原理 平面机构是由各个杆组依次联结到机架和原动件上形成的。机构具有确定运动的条件是机构的自由度大于零,且原动件数和机构的自由度相等。所拼接的机构必须满足以上两个条件。将主要由连杆构成的连杆机构(可加入一个其他类型构件如齿轮、凸轮、槽轮等)进行拼装,计算分析其自由度后,输入动力源进行
可站立式电动轮椅机构设计及运动学仿真
万方数据
万方数据
万方数据
可站立式电动轮椅机构设计及运动学仿真 作者:任怡, 张峻霞, 薛强, 胡军, REN Yi, ZHANG Jun-xia, XUE Qiang, HU Jun 作者单位:天津科技大学,机械工程学院,天津,300222 刊名: 机械设计 英文刊名:JOURNAL OF MACHINE DESIGN 年,卷(期):2009,26(3) 被引用次数:0次 参考文献(4条) 1.张锡玉轮椅舒适性研究及脑瘫患者专用轮椅的设计 2006 2.刘云.王艾伦一种新型可卧立电动轮椅的研制与设计[期刊论文]-机械与电子 2007(10) 3.国家质量技术监督局GB 10000-1988.中国成年人人体尺寸国家标准 4.丁玉兰人机工程学 2005 相似文献(1条) 1.期刊论文赵亮专利侵权屡忍耐维权无获心难平——访中国站立式电动代步车专利持有人谢寿椿-中国发明与专 利2010(6) 谢寿椿,1935年生于浙江杭州.20世纪50年代毕业于清华大学,高级工程师,一生从事机械制造和汽车、摩托车设计、运用及维修的教学科研中在我国工业设计行业尤为知名.曾18此获得省部级嘉奖,连续两届当选兰州市安宁区人大代表.退休后,仍被业界多家中外知名企业竞相争聘.向来爱好机械设计的谢寿椿,闲暇中研发的新型电动代步车、电动轮椅、电动跑车等.已取得国家知识产权局颁发的四个中国实用新型专利及美国专利与商标局(USPTO)颁发的美国发明专利证书(US7.192.040B2). 本文链接:https://www.360docs.net/doc/3e5564950.html,/Periodical_jxsj200903014.aspx 下载时间:2011年2月15日
QJ1E47FMD发动机运动学及动力学仿真计算
QJ147FMD发动机运动学及动力学仿真计算 一、QJ147FMD发动机的参数: 标定转速:6000r/min 曲轴半径:19.6mm 连杆长度:80mm 缸径:47mm 曲柄连杆比:0.245 二、曲柄连杆机构再ADAMS软件中的仿真计算: 上图是燃气的爆发压力和往复惯性力以及合力的曲线图。 上图是用ADAMS软件仿真计算出的往复惯性力和理论计算的比较图。粉色——理论计算,蓝色——仿真计算。理论计算:max=745N,min=-1230N; 仿真计算:max=546.6316N,min=-901.3991N. 出现上诉的原因个人理解是: (1)仿真计算的往复加速度=理论计算的往复加速度,那么产生仿真计算所得到的往复惯性力和理论计算所得到的往复惯性力之所以不同的原因就在于往复质量的计算;(2)在理论计算中,往复质量的计算是由活塞组的质量+连杆小头的质量,而在小头质量的换算过程中教科书上介绍的方法一般有两种,即两质量和三质量系统来等效代替
连杆。并且可以确定的是用三质量系统来代替两质量系统计算的更为精确只是计算起来比较困难。那么我们可以推想如果可以的话用四质量系统来代替连杆所得到的结果应该比三质量系统来代替连杆是不是更为精确?如果答案是肯定的,那么我们就有理由相信:用无数个质量点来代替连杆系统所计算得到的结果将会比2质量系统来代替连杆计算的精度要高很多,这一点用ADAMS软件可以轻松的做到。(3)现在我们来做一个对比,即同一个连杆用两质量系统和三质量系统分别来代替的时候,同一个连杆在换算到连杆小头质量是如何变化的?很容易想到用三质量系统来代替连杆的时候换算到连杆小头的质量应该比两质量换算到连杆小头的质量要小,那么我们有理由相信:当用无数个质量点来代替连杆的时候,换算到连杆小头的质量要比教科书上按两质量系统来代替连杆换算到连杆小头出的往复质量要小。(4)由于摩托车的发动机的转速很高,所以他的往复加速度很大。我们这次所研究的发动机的加速度的数量级:几千。可见,当往复质量减少1%时,则往复惯性力将减少几十牛。(这也是我们在设计高速发动机的时候要注意减少往复惯性质量的原因,而我们按照理论公式来计算的时候,实际上已经人为的增大了往复质量。)由以上的分析,我们有理由认为用ADAMS仿真软件来进行计算,所得到的结果比按纯理论方法所计算的更为精确。 三、主轴径的受力分析: (1)我们用ADAMS软件,将所研究的发动机的轴径作为刚体并且还考虑到了轴承的安装位置以及曲柄系统的质心位置的影响之后所得到的曲轴主轴径的受力分析图。 上图是曲轴的两个轴径受力的极坐标图。
槽轮机构的组成及其特点
槽轮机构的组成及其特点 newmaker (1) 槽轮的组成(Composition of Geneva Mechanism) 如右图所示,主动拨盘上的圆柱销进进槽轮上的径向槽以前,凸锁止弧将凹锁止弧锁住,则槽轮静止不动。圆柱销进进径向槽时,凸、凹锁止弧恰好分离,圆柱销可以驱动槽轮转动。当圆柱销脱离径向槽时,凸锁止弧又将凹锁止弧锁住,从而使槽轮静止不动。因此,当主动拨盘作连续转动时,槽轮被驱动作单向的间歇转动。 (2)槽轮的特点 构造简单,外形尺寸小; 机械效率高,并能较平稳地,间歇地进行转位; 但因传动时存在柔性冲击,故常用于速度不太高的场合。 槽轮机构的类型及应用 (1)槽轮机构的类型(Type of Geneva Mechanism) 外槽轮机构:运动时,拨盘与槽轮为异向回转。 内槽轮机构:运动时,拨盘与槽轮为同向回转。 两种机构均用于平行轴之间的间歇传动。 (2)槽轮机构的应用举例(Application Sample of Geneva Mechanism) 外槽轮机构被广泛应用于电影放映机中。
(3)球面槽轮机构(Sphere Geneva Mechanism) 当需要在两相交轴之间进行间歇传动时,可采用球面槽轮机构。右图为球面槽轮机构。 槽轮机构的运动系数及运动特性 (1)槽轮机构的运动系数k (Motion Factor of Geneva Mechanism) k=td/t 又因拨盘1一般为等速回转,因此时间的比值可以用拨盘转角的比值来表示。可得外槽轮机构运动系数的另一表达式: 由于运动系数k应大于零,所以由上式可知外槽轮径向槽的数目z应大于3。又由上式可知,
电动轮椅车注册技术审查指导原则
电动轮椅车注册技术审 查指导原则 Document number:NOCG-YUNOO-BUYTT-UU986-1986UT
国药监总局2017年第180号附件2 电动轮椅车注册技术审查指导原则本指导原则旨在指导注册申请人对电动轮椅车注册申报资料的准备及撰写,同时也为技术审评部门审评注册申报资料提供参考。 本指导原则是对电动轮椅车的一般要求,申请人应依据产品的具体特性确定其中内容是否适用,若不适用,需具体阐述理由及相应的科学依据,并依据产品的具体特性对注册申报资料的内容进行充实和细化。 本指导原则是供申请人和审查人员使用的指导文件,不涉及注册审批等行政事项,亦不作为法规强制执行,若有能够满足法规要求的其他方法,也可以采用,但应提供详细的研究资料和验证资料。应在遵循相关法规的前提下使用本指导原则。 本指导原则是根据现行法规、标准体系及当前认知水平下制定,随着法规、标准体系的不断完善和科学技术的不断发展,本指导原则相关内容也将适时进行调整。 一、适用范围 本指导原则的适用范围为第二类医用电动轮椅车,是可由乘坐者或护理者操作的、由电机驱动、能电动控制速度、可使用手动或动力转向的供残障者使用的带有座椅支撑的轮式个人移动装置。
本指导原则适用于仅乘载1人且使用者质量不超过100kg 残疾或无完全行走能力者使用的、由电能驱动的各种电动轮椅车。 本指导原则不适用于承重超过100kg的电动轮椅车,但可参考ISO7176系列标准及本指导原则进行技术审查。本指导原则不适用于由电力助动的手动轮椅车和电动代步车。 二、技术审查要点 (一)产品名称要求 产品的命名应符合《医疗器械通用名称命名规则》(国家食品药品监督管理总局令第19号)和国家标准、行业标准中的通用名称要求,例如:电动轮椅车、电动轮椅、室外型电动轮椅车。电动轮椅车设计图和样品图如图1和图2所示。 图1电动轮椅车设计图 图2电动轮椅车样品图 (二)产品的结构和组成 电动轮椅车一般由座椅、扶手、弯腿脚踏板、轮组、控制系统、电机、蓄电池、适配器等组成。 (三)产品工作原理/作用机理 工作原理:电动轮椅车是一种以蓄电池为能源、电子装置控制驱动的动力轮椅车。使用者可通过控制装置自行驱动轮椅车行进。 因为该产品为非治疗类医疗器械,故本指导原则不包含产品作用机理的内容。 (四)注册单元划分的原则和实例
proe机构运动仿真教程
proe机构运动仿真教程 典型效果图 1.1机构模块简介 在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。对于提高设计效率降低成本有很大的作用。Pro/ engineer中“机构”模块是专门用来进行运动仿真和动态分析的模块。 PROE的运动仿真与动态分析功能集成在“机构”模块中,包括Mechanism design(机械设计)和Mechanism dynamics (机械动态)两个方面的分析功能。 使用“机械设计”分析功能相当于进行机械运动仿真,使用“机械设计”分析功能来创建某种机构,定义特定运动副,创建能使其运动起来的伺服电动机,来实现机构的运动模拟。并可以观察并记录分析,可以测量诸如位置、速度、加速度等运动特征,可以通过图形直观的显示这些测量量。也可创建轨迹曲线和运动包络,用物理方法描述运动。 使用“机械动态”分析功能可在机构上定义重力,力和力矩,弹簧,阻尼等等特征。可以设置机构的材料,密度等特征,使其更加接近现实中的结构,到达真实的模拟现实的目的。
如果单纯的研究机构的运动,而不涉及质量,重力等参数,只需要使用“机械设计”分析功能即可,即进行运动分析,如果还需要更进一步分析机构受重力,外界输入的力和力矩,阻尼等等的影响,则必须使用“机械设计”来进行静态分析,动态分析等等。 1.2总体界面及使用环境 在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图1-3所示的“机构”下拉菜单,模型树增加了如图1-4所示“机构”一项内容,窗口右边出现如图1-5所示的工具栏图标。下拉菜单的每一个选项与工具栏每一个图标相对应。用户既可以通过菜单选择进行相关操作。也可以直接点击快捷工具栏图标进行操作。 图1-1 由装配环境进入机构环境图 图1-2 机构模块下的主界面图 图1-3 机构菜单图1-4 模型树菜单图1-5 工具栏图标图1-5所示的“机构”工具栏图标和图1-3中下拉菜单各选项功能解释如下:
基于MATLAB仿真的残障电动轮椅车速控制系统设计.
电子课程设计报告 题目:基于MATLAB仿真的残障电动 轮椅车速控制系统设计 课程:自动控制原理 学生姓名: 学生学号: 年级: 专业: 班级: 指导教师: 机械与电气工程学院制 2015 年3月
基于MATLAB 仿真的残障动轮椅 车速控制系统设计 1.课程设计的任务与要求 1.1设计课题 基于MATLAB 仿真的残障电动轮椅车速控制系统设计 系统结构图为: 图1 系统方框图 其中,控制器为K G c =,传感器模型为2 5.2)(1+= s s G 、被控对象模型为)125.0)(1(1)(2++=s s s G 。 1.2 课程设计的任务 (1)简述具有头盔传感器的残障电动轮椅车速控制的基本原理及应用; (2)编程求解系统的传递函数) ()(s R s C ; (3)编程绘制系统的根轨迹,并求分离点坐标的增益K 值、与虚轴交点时的K 值和ω值; (4)编程当系统的速度误差系数8=K 时,绘制系统单位阶跃响应和单位斜坡的曲线,利用MATLAB 进行系统动态特性分析(求出其性能指标s t %,σ的值)和稳态误差。
(5)编程绘制当8=K 时系统的Bode 图、Nyquist 图,求出相角裕量和幅值裕量,判断系统稳定性。 (6)当控制器为P 控制律)12(4+=s G c 时,编程此时系统的Bode 图、Nyquist 图,求出相角裕量和幅值裕量,判断系统稳定性。 1.3课程设计的目的 (1) 正确理解传递函数及根轨迹的概念; (2) 掌握根轨迹的绘制法则,能熟练绘制跟轨迹; (3) 根据根轨迹定性分析系统指标随参数变化的趋势; (4) 熟练使用MATLAB 工具绘制系统的根轨迹和传递函数; (5) 使用MATLAB 工具对系统进行稳定性分析、稳态误差分析以及动态特性析; (6)使用MATLAB 工具画出Bode 图、求出相角裕量和幅量并判断系统的稳定性。 2. 具有头盔传感器的残障电动轮椅车速控制的基本原理及应用 一种新型的电动轮椅装有一种非常实用的速度控制系统,使颈部以下有残障的人士也能自动驾驶这种电动轮椅。该系统在头盔上以间隔?90安装了四个速度传感器,用来指示前、后、左、右四个方向。头盔传感系统的综合输出与头部运动的幅度成正比。 国内对电动轮椅的研究较晚,尤其是智能电动轮椅,研究还不完善,但近几年发展很快。国内厂商生产的电动轮椅大部分为四轮式和六轮式,一般都具有调速、翻越简单路障和防倾倒等功能。虽然国内电动轮椅研究还不太完善,但在一定的基础上还是有所提高的。例如有些生产商在原有轮椅的研究上,发明出利用驱动左、右动力后轮的左、右电机串联连接设计,从而具有差动速度功能,使电动轮椅行驶时稳定舒适、转向可靠。近几年,还出现了手扶电动、可爬梯以及站立式电动轮椅。 随着机器人技术、人工智能技术和传感器技术的进步,电动轮椅的研究朝着高性能、多功能、智能化和人性化的方向发展。智能轮椅不但可以为老年人和残疾人提供一种良好的代步工具,而且可以具有自主导航、自主避障、人机对话等服务机器人所具有的各种功能,因而可以帮助残疾人和老年人提高自己的生活自
典型机构运动学
技术测量及运动学、力学分析能力训练 典 型 机 构 的 运 动 学 分 析 年级: 班级: 学号: 姓名:
对心曲柄滑块机构的运动学分析 一、已知参数: 在图1所示的曲柄滑块机构中,已知各构件的尺寸分别L1=80mm,L2=120mm,ω=66rad/s, 试确定连杆2和滑块3的位移、速度和加速度,并绘制出运动线图。 图1 曲柄滑块机构 二、机构的工作机理 1、机构自由度计算 F=3n-2p l -p h =3x3-2x4-0=1 2、机构的拆分及级别 该机构由一个Ι机构和一个ΙΙ 机构组成 三、数学模型的建立: 1、位置分析 由图1可以得到偏置曲柄滑块机构的向量模型,如图2所示,从而可得该机构的闭环位移矢量方程: 图2 对心曲柄滑块机构向量模型 C S l l =+21 将该闭环位移矢量方程向X 轴和Y 轴进行分解,可得该矢量方程的解析式: s i n s i n c o s c o s 22112211=+=+θθθθl l S l l C (1)
由式(1)得: 2211cos cos θθl l S C += ; ??? ? ??-=2112sin arcsin l l θθ ........... (2) 2、速度分析: 对(1)式两边求时间的一阶导数,可得机构的速度运动学方程: C v l l l l =--=+222111222111sin sin 0cos cos θωθωθωθω (3) 为了便于编写程序,将(3)式改写成矩阵形式: ??? ???-=????????????-11 11122222cos sin . 0 cos 1 sin θθωωθθl l v l l C (4) 3、加速度分析: 对(3)式两边求时间的一阶导数,可得机构的加速度运动学方程(矩阵形式): ? ?????--=????????????+????????????-11 11111222222222222sin cos 0 sin 0 cos 0 cos 1 sin θωθωωωθωθωαθθl l v l l a l l C C (5) 四、程序设计 1、主程序 %输入已经知道的数据 clear; l1=88; l2=102; e=0; hd=pi/180; du=180/pi; omega1=77; alpha1=0; %调用子函数 for n1=1:361 theta1(n1)=(n1-1)*hd; [theta2(n1),s3(n1),omega2(n1),v3(n1),alpha2(n1),a3(n1)]=slider_crank(theta1(n1),omega1,alpha1,l1,l2,e); end %绘制位移图 figure(1); n1=1:361; subplot(2,2,1); [AX,H1,H2]=plotyy(theta1*du,theta2*du,theta1*du,s3); set(get(AX(1),'ylabel'),'String','连杆角位移/\circ')