镜头光学基础教程

鏡頭光學基礎
第一章:基礎光學名詞
在這個課程中,所要講的題目是“鏡頭檢測之光學基礎”。主要內容是有關鏡頭檢測所必須具備的光學基礎概念。我們將分兩個主題進行說明,第一個主題是“基礎光學名詞”的解釋,第二個主題則是“像差”觀念的介紹。
首先我們要進行的是“基礎光學名詞”的解釋,內容則包含:光軸/近光軸、六個基本點、焦距、F-Number 、光瞳與視場。
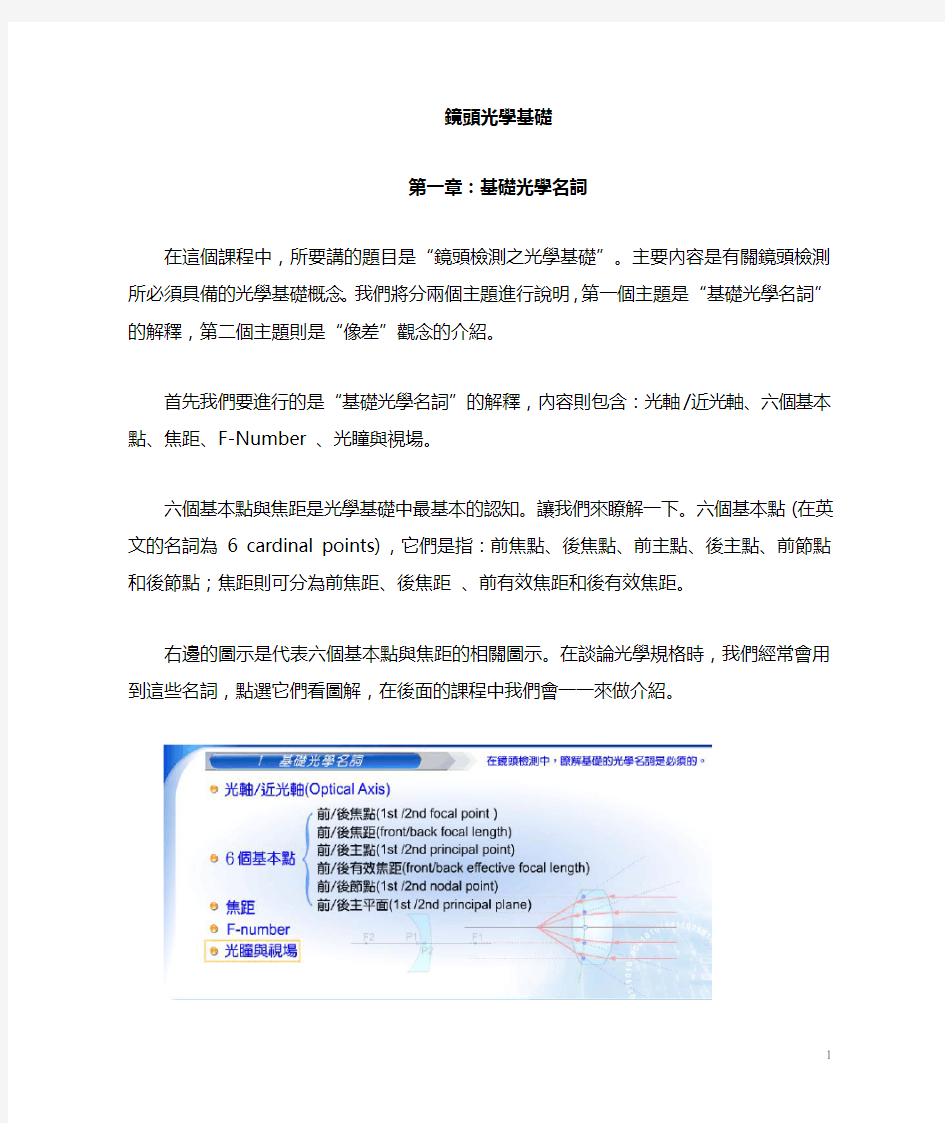
六個基本點與焦距是光學基礎中最基本的認知。讓我們來瞭解一下。六個基本點(在英文的名詞為6 cardinal points) ,它們是指:前焦點、後焦點、前主點、後主點、前節點和後節點;焦距則可分為前焦距、後焦距、前有效焦距和後有效焦距。
右邊的圖示是代表六個基本點與焦距的相關圖示。在談論光學規格時,我們經常會用到這些名詞,點選它們看圖解,在後面的課程中我們會一一來做介紹。
1-1光軸/ 近光軸
何謂光軸?光軸的英文名詞是Optical Axis,對於單一透鏡而言,由前後兩個面的曲率中心所定出的一條線,就稱為光軸。如果鏡片不止一片,也是以此類推,取所有面的曲率中心衍生出的直線,就是光軸。
近光軸的英文名詞為Paraxial Axis,也稱為順光軸,指的是極靠近光軸且沿著光軸之區域。如圖所示,紅線為光軸,綠色區域就是近光軸。
1-2 前/後焦點vs. 前/後焦距
我們先來看前焦點。如圖所示,紅色的平行光線沿著光軸從鏡片後方進來,通過透鏡,光線會聚焦到透鏡前方的點,這個光點我們就稱之為前焦點,我們以小f1表示。而前焦距Front Focal Lengrh指的就是:在光軸上,從前焦點到鏡片前頂點位置A的距離,英文縮寫為FFL 。
後焦距指的是平行光線沿著光軸從透鏡前方平行射入,匯聚到鏡頭後方的點,這個光點就稱為後焦點,以小f2表示。在光軸上,從後焦點到到透鏡後方的最頂點位置B,我們稱之為後焦距,英文名稱是Back Focal Lengrh,英文縮寫則以BFL 表示。
1-3 前/後主點vs. 前/後有效焦距vs. 主平面/主面
介紹了前焦點、後焦點與前焦距、後焦距之後,我們要介紹主點與有效焦距。什麼叫做主點呢?在圖中,平行光線沿著光軸由透鏡後方入射,經過透鏡折射並通過鏡片後,光線再由鏡片射出。我們將這平行入射光線做一延長線;而從鏡頭出射的光線,我們同樣的也對此出射光線做一延長線,兩個延長線的交會之處我們就稱為主點。由各個主點所構成的面就是我們說的主面,英文稱為“ principal surface”。主面實際上會有一點彎曲,而非平面。在極為靠近光軸上的主點,我們可看成是位於光軸上的主點,此光軸上的主點就是第一主點。由光軸上之主點,在垂直於光軸的方向上畫一平面,此平面稱為第一主平面。
同樣的,如果平行光是從透鏡前方入射,通過鏡片之後,聚焦到後焦點的位置,我們將這個平行入射光和鏡頭出射光各做一條延長線,兩延長線的交會點就是主點,在光軸上的主點我們稱為第二主點。由第一主點到前焦點之距離我們稱為前有效焦距。由第二主點到後焦點的距離就是後有效焦距。
何謂有效焦距?有效焦距指的就是主點到焦點之間的距離。一般而言,如果透鏡是放置在空氣中,那麼,前後的有效焦距是一樣的;如果透鏡一半置放在空氣,一半浸在水中,那麼前後的有
效焦距就會不一樣。在一般規格書上,所謂的焦距若沒有特別指明,那麼它指的就是有效焦距,不是前焦距,也不是後焦距,這是我們所必須特別注意的部分。
我們已經知道什麼是焦點什麼是主點,現在讓我們來瞭解一下焦點和主點的位置關係。不同形狀的透鏡,其焦點和主點的位置會有所不同。F1代表前焦點,F2代表後焦點,P1代表前主點,P2則代表後主點。以凸透鏡和凹透鏡來看,兩者的前焦點和後焦點的位置恰好相反,這是由於光線經過凸透鏡會聚焦在一點,而光線經過凹透鏡則會發散的關係。我們從這些圖可以歸納出一些定律:無論是凸透鏡或是凹透鏡,只要透鏡兩面對稱,它們的主點都會落在鏡片內;如果是平凸透鏡或平凹透鏡,那麼,鏡片的一個主點會落在鏡片內,另一個會落在鏡片的曲面上;至於雙月型的的透鏡,一個主點在鏡片內,另一個主點則會在鏡片之外。
1-4 節點
接下來,我們要介紹什麼是節點。當光線斜向入射於一個透鏡,經過透鏡之後會產生折射現象,再從透鏡射出。假設:該入射光線和光軸所形成的夾角,我們稱之為θ1;出射光線和光軸所形成的夾角,我們稱為θ2。如圖A所示,當θ1= θ2時,我們就可以定義出兩個節點。那麼,如何定義出節點的位置呢? 我們可以對入射光畫一條延長線,此延長線與光軸交會之處即為節點N1,而出射光之延長線與光軸交會之處則為另一個節點N2。
圖B則顯示光線未通過N1, N2的情形,此時,θ1不會等於θ2 。相反的,如果光線通過鏡片折射後,入射光線與光軸之夾角θ1不等於出射光與光軸之夾角θ2時,於就表示光線的延長線不會通過節點。
另外,我們要說明的一點是:當鏡片置於空氣中的時候,其節點位置與主點位置重合。也就是說:當鏡片置於空氣中的時候,節點就是主點。
1-5 主光線/邊緣光線/視場角
在這個單元,我們要認識一下主光線、邊緣光線、視場角和視場高度。點選這些名詞,瞭解它們的定義和圖解。
凡是通過光圈中心點的光線我們就稱為主光線。主光線可以有很多條。
邊緣光線指的是由光軸上的物點發出、且通過光圈邊緣的光線。
由射出之主光線所延伸的延長線和光軸所形成的夾角θ角,我們稱為視場角。而主光線的延長線與光軸相交會之處,即為出光瞳之位置。所以,視場角可看成是:由出光瞳發出之光線與光軸所夾之角度。事實上,不同的主光線決定出不同的視場角。到達成像面之最大邊緣處之主光線,就決定出最大視場角度。至於何謂出光瞳?將於後面的單元解釋。
視場高度指的是在成像面上主光線與光軸之間的距離,也就是眼睛可以看到的範圍。因此,從螢幕最邊緣的位置到鏡頭光軸位置之間的距離,我們就可以得知最大的視場高度是多少。
1-6 光瞳(光闌)
接下來,我們要介紹光瞳。
光瞳,亦稱為光闌,可分為四種:分別是孔徑光闌(Aperture Stop或Aperture Pupil )、視場
光闌(Field Stop)、入光瞳(Entrance Pupil)和出光瞳(Exit Pupil)。我們將在後面一一介紹。
孔徑光闌,英文是Aperture Stop,亦稱為Aperture Pupil,它是限制光學系統進光量之孔徑大小,也就是我們常說的光圈,在相機中可以看到這樣的機制,如左圖所示。鏡頭本身雖然很大,但卻有一個機制限制進光量的大小,這個機制就是孔徑光闌。
那麼,什麼是視場光闌呢?視場光闌的英文為Field Stop。我們以右邊圖形來做解說,假設鏡頭的右方是底片,光源從鏡頭的左下方進入,在這個圖中,能控制進光量的是鏡片本身,所以孔徑光闌就是鏡片本身。當斜向入射光線角度太大時,將使得光線無法進入底片,這也就意謂著底片限制了斜向入射光線的入射角度,也就是說底片控制了視場角度與視場高度的大小,因此,底片就是我們所說的視場光闌。
1-7 入光瞳/出光瞳
現在,我們要介紹什麼是入光瞳,什麼是出光瞳。
主光線沿著光入射方向之延長線,與光軸交會處,即為入光瞳之位置。而入光瞳的大小,則由入射之邊緣光線的延長線決定。入光瞳其實就是光圈對於位於光圈前方鏡片所成的影像。也就是說,光圈在物空間成像之大小即為入光瞳大小。
而主光線沿著光出射方向之延長線,與光軸交會處,即為出光瞳之位置。出光瞳之大小,由出射之邊緣光線之延長線決定。出光瞳其實就是光圈對於位於光圈後方鏡片組所成的影像。也就是說,光圈在像空間成像之大小即為出光瞳大小。
要如何辨別入光瞳或出光瞳的大小,最簡單的方法就是實際拿鏡頭來觀察,以中間的照片為例子,如果是站在鏡頭前方,所看到的光圈大小,其實就是入光瞳的大小,此為光圈對於位於光圈
前面的鏡片所成之影像;反之,如果是站在鏡頭的後方,所看到的光圈大小,其實就是出光瞳的大小,此為光圈對於位於光圈後面的鏡片所成之影像。
1-8 F-Number
學完了有效焦距和入光瞳,我們就可以來推算F-number,F-number在光學規格中會經常聽到。它的定義是什麼呢?F-number的定義即是有效焦距除以入光瞳大小。
對於擁有相同焦距的兩個鏡頭而言,F-number 值較大的鏡頭,代表它的入光瞳較小。反之,F-number 值較小的鏡頭,代表它的入光瞳較大。入光瞳愈大,可進入此鏡頭之進光量就愈多;入光瞳愈小,可進入此鏡頭之進光量就愈少。對於相機鏡頭而言,入光瞳愈大,進光量愈多,底片所需要的曝光時間就愈短。反之,F-number 值愈大,入光瞳愈小,相機鏡頭的進光量愈少,底片所需要的曝光時間也就愈長。
第二章:像差
介紹了幾個基礎光學名詞之後,接下來,我們要介紹像差。
通常我們講的像差包括:球面像差、彗差、像散、場曲、畸變和色差。英文名稱分別是:Spherical Aberration、Coma 、Astigmatism、Field Curvature、Distortion以及Chromatic Aberration。這些影響成像品質的像差其實決定了鏡頭的好壞,而鏡頭的品質大大影響量測的結果。所以在學鏡頭檢測前,我們必須對這些像差有概略性的瞭解。
至於為什麼會有像差?此乃光經過球面透鏡折射後,所自然產生的情況,這些像差會影響成像品質的好壞。為了提昇成像品質,降低這些像差,於是有所謂的鏡頭光學設計,設計出如何搭配不同材質與形狀的鏡片,甚至有非球面鏡片的設計,以降低不同的像差,達到光學品質的需求。
2-1 球面像差
首先我們來看何謂球差,或稱“球面像差”,英文名稱是Spherical Aberration。理想而言,當平行光經過透鏡,我們期望光線會聚焦到同一點上,以使成像為清晰的光點。但是由於球面透鏡本質的關係,在靠近光軸區域的平行光線會聚焦在光點P上,而經過透鏡較外緣部分的光線卻會聚焦在另一個光點B上。也就是光線在經過透鏡不同孔徑區域範圍的光線會聚焦在不同的位置上,
使得成像面上的光點不再是清晰的一個光點,而是一團模糊的光暈,這種現象我們稱之為球差。
2-2 彗星形像差
如果光斜向入射進入透鏡,它的成像點不是圓點,而是彗星形狀的一個點,這種像差稱為彗差。它的英文名稱是“Coma”。
2-3 像散
現在我們來介紹像散,像散的英文名稱是“Astigmatism”。在介紹像散之前,我們先來瞭解何謂Tangential Plane? 何謂Sagittal Plane? 假設物點P在光軸下方,則由物點P與光軸所構成之鉛垂面稱為Tangential Plane,或稱為Meridinal plane,中文翻譯成“子午面” ,而與此鉛垂面相互垂直之水平面即為Sagittal Plane,亦稱為Radial Plane 。像散指的就是水平方向和垂直方向成像位置不同所造成的像差。從圖上可明顯看出在Tangential Plane的光線,其聚焦的位置在T點上,而在Sagittal Plane的光線則是聚焦在S點上,這就是像散。我們從物空間來做進一步的解釋:以投影機為例,假設被投影的物件為十字標靶,拿一張白紙在鏡頭前,如果將白紙往前移,投射出來的成像在垂直線上較粗而水平線的成像較細;此時,若再將白紙往後移動,卻發現投射出來的成像是水平線較粗而垂直線較細,那麼就表示這個鏡頭會有像散的現象產生。同樣的,如果有一個點光源經過鏡頭成像,成像點是一團光暈,此時我們拿一張白紙放在成像面上,並且前後移動,如果成像點不再是一個圓點,而是一個扁橢圓形光點或是長橢圓形光點,那麼這
顆鏡頭就是具有有像散的鏡頭。
2-4 場曲
何謂場曲? 場曲的英文名稱是“Field Curvature”。
如圖中所示,假設光線沿著光軸入射至鏡頭,並且成像於A點的位置。而另兩組不同斜向角度入射之光線通過鏡片後,分別聚焦到B點與C點。由A、B、C...等這些焦點所構成之焦點面,事實上並非平面,而是彎曲面,這種現象稱為場曲。
2-5 畸變
另外一種像差是畸變,英文稱之為Distortion。畸變是像差中最常看到的。假設正常的圖像為方格子狀,如果透過鏡頭看到的是如枕頭狀的圖a,我們就說這是針形畸變;如果看到的是如圖b,我們就稱這是桶形畸變。
猜猜看,綠髮老頭透過針形畸變和桶形畸變會變成什麼模樣?將滑鼠移到兩個放大鏡瞧一瞧。2-6 色差
若白光進入透鏡,因為鏡片對於不同顏色光的折射率不同,使得紅光、藍光和綠光經過透鏡之後,其成像位置點都不一樣,我們稱此種現象為色差(英文稱之為Chromatic Aberration)。如果色差是沿著光軸方向產生,叫做縱向色差,英文稱之為Longitudinal Chromatic Aberration ;反之,如果是在橫向面上--也就是成像面上所看到的色差,就稱為橫向色差,英文稱之為Transverse Chromatic Aberration或是Lateral Chromatic Aberration。
第三章:影響像差之因素
最後我們要了解的是影響鏡頭或鏡片像差的因素。
影響鏡頭或鏡片像差的因素有哪些呢?
第一個是鏡片的形狀或擺放的位置,我們可以明顯地從圖中看到,如果平行光從凸面入射,它的聚焦點十分清晰;但是如果將平凸透鏡顛倒,讓平行光從平面這個方向入射,球差情形嚴重,會有光暈產生。由此可見,鏡片的擺放位置會影響像差。由此例,亦可了解不同形狀之鏡片會有不同之像差,此乃因為光經過不同曲率之鏡面,其折射光所經過之路徑不同,導致成像點不同,影響像差之差異。以此例而言,我們可分別看出光通過平凸透鏡與光通過凸平透鏡的像差差異。
其次是鏡片的材質,比方說玻璃透鏡和塑膠鏡片的聚焦位置就有不同。
第三個是鏡片的光圈位置也會影響像差。上圖的光圈在鏡頭之前,下圖的光圈在鏡頭之後,因此,光線通過鏡頭的區域就會不同。我們以斜向入射光來看,上圖的斜向入射光線通過鏡頭上方,而下圖的斜向入射光線則通過鏡頭的下方,即使同一鏡片,上方和下方也為因為材質或曲率的差異而造成像差。再者,光圈和鏡頭的遠近也是影響像差的因素之一。
光圈位置之改變, 將導致光入射至光學鏡片之位置改變,而有不同之像差。
最後一個是鏡片與鏡片的組合位置,像圖中的鏡頭雖然都是由一個平凹透鏡和一個球面透鏡所組合,但由於放置的位置不同或兩片鏡片之距離改變,就會導致像差的不同。
光学设计岗位规范
光学设计岗位规范 1 范围 本规范规定了光学设计岗位职责和岗位标准。。 本规范适用于光学设计岗位的初级、中级、高级职务人员。 2 引用标准 Q/AG L07 1.1-2003职工政治思想和职业道德通用标准 3 岗位职责(概括和列举该岗位的工作职责) 3.1 负责光学系统研究、设计的全部技术工作,试验、试制的配合工作。 3.2 严格贯彻执行国标、部标、企标及有关科研技术、质量管理和安全技术的法规。 3.3 负责项目预研、技术论证、可行性研究论证、技术经济分析和项目的申报工作。 3.4 根据研制合同,制定阶段和年度工作计划,并组织实施。 3.5 参加本专业及有关专业的技术会议,评审本专业范围内的科研成果。 3.6 贯彻全面质量管理,负责对试验中出现的各种技术问题进行分析、论证,改进设计。 3.7 根据使用部门的要求和市场需求,采用适合的光学系统的结构,满足性能指标。研究新技术,加速光电系统的更新换代。 3.8 根据项目进展情况,适时编写专题技术总结、专题研究报告、鉴定申请报告等。 3.9 负责技术转让、技术咨询、技术服务以及完成技术资料的归档工作。 4 岗位标准 4.1 政治思想与职业道德 执行Q/AG L07 1.1-2003职工政治思想与职业道德通用规范 4.2 文化程度
执行Q/AYGF 1.1 4.3 专业理论知识 4.3.1 初级职务 4.3.1.1 具有高等数学、普通物理等基础理论知识。 4.3.1.2 具有应用光学、光学仪器制图等专业理论知识。 4.3.1.3 了解光学系统性能和集成、试验、应用、储存中的有关安全规程。 4.3.1.4 了解光学系统设计和研制过程,及有关技术标准。 4.3.1.5 初步掌握一门外语,并能查阅本专业书刊、资料。 4.3.2 中级职务 4.3.2.1 具有光学、计算机CAD设计、光学仪器制图原理等基础理论知识。了解红外、激光、电视、可见光系统等有关知识。 4.3.2.2 熟悉光学系统性能和集成、试验、应用、储存中的有关安全规程。 4.3.2.3 熟悉光学系统国内外研制状况和发展趋势。 4.3.2.4 熟悉国内外光电系统光学设计研制技术及技术标准。 4.3.2.5 掌握一门外语,并能较熟练地查阅本专业书刊、资料。 4.3.3 高级职务 4.3.3.1 熟练掌握光学系统涉及的红外、激光、电视、微光、可见光学等专业理论知识。 4.3.3.2 精通光学系统研究的技术理论、熟悉典型的、同类型光学系统的性能指标及研究的技术难点。 4.3.3.3 精通光电系统集成与实验理论。 4.3.3.4 熟悉光电系统研制程序、典型技术和有关标准。 4.3.3.5 掌握国内外光电系统发展状况和发展趋势。 4.3.3.6 掌握光电系统应用的有关技术和知识。 4.3.3.7 掌握一门外语,并能熟练地查阅和笔译本专业的书刊、资料。 4.4 实际工作能力 4.4.1 初级职务 4.4.1.1 能完成光电系统的一般实验,参与试验方案的讨论与制定。
工程光学基础
工程光学基础学习报告 ——典型光学系统之显微镜系统
由于成像理论的逐步完善,构成了许多在科学技术和国民经济中得到广泛应用的光学系统。为了观察近距离的微小物体,要求光学系统有较高的视觉放大率,必须采用复杂的组合光学系统,如显微镜系统。 ●显微镜的介绍 显微镜是由一个透镜或几个透镜的组合构成的一种光学仪器,是人类进入原子时代的标志。主要用于放大微小物体成为人的肉眼所能看到的仪器。光学显微镜是在1590年由荷兰的詹森父子所首创。现在的光学显微镜可把物体放大1600倍,分辨的最小极限达0.1微米,国内显微镜机械筒长度一般是160mm。列文虎克,荷兰显微镜学家、微生物学的开拓者。 显微镜是人类这个时期最伟大的发明物之一。在它发明出来之前,人类关于周围世界的观念局限在用肉眼,或者靠手持透镜帮助肉眼所看到的东西。 显微镜把一个全新的世界展现在人类的视野里。人们第一次看到了数以百计的“新的”微小动物和植物,以及从人体到植物纤维等各种东西的内部构造。显微镜还有助于科学家发现新物种,有助于医生治疗疾病。 ●显微镜的分类 显微镜以显微原理进行分类可分为光学显微镜与电子显微镜,而我们课堂上讲的是光学显微镜。 ●显微镜的结构 普通光学显微镜的构造主要分为三部分:机械部分、照明部分和光学部分。 ◆机械部分 (1)镜座:是显微镜的底座,用以支持整个镜体。 (2)镜柱:是镜座上面直立的部分,用以连接镜座和镜臂。 (3)镜臂:一端连于镜柱,一端连于镜筒,是取放显微镜时手握部位。 (4)镜筒:连在镜臂的前上方,镜筒上端装有目镜,下端装有物镜转换器。 (5)物镜转换器(旋转器)简称“旋转器”:接于棱镜壳的下方,可自由转动,盘上有3-4 个圆孔,是安装物镜部位,转动转换器,可以调换不同倍数的物镜,当听到碰叩声时,方可进行观察,此时物镜光轴恰好对准通光孔中心,光路接通。转换物镜后,不允许使用粗调节器,只能用细调节器,使像清晰。 (6)镜台(载物台):在镜筒下方,形状有方、圆两种,用以放置玻片标本,中央有一通光孔,我们所用的显微镜其镜台上装有玻片标本推进器(推片器),推进器左侧有弹簧夹,用以夹持玻片标本,镜台下有推进器调节轮,可使玻片标本作左右、前后方向的移动。 (7)调节器:是装在镜柱上的大小两种螺旋,调节时使镜台作上下方向的移动。 ①粗调节器(粗准焦螺旋):大螺旋称粗调节器,移动时可使镜台作快速和较大幅度的升降,所以能迅速调节物镜和标本之间的距离使物象呈现于视野中,通常在使用低倍镜时,先用粗调节器迅速找到物象。 ②细调节器(细准焦螺旋):小螺旋称细调节器,移动时可使镜台缓慢地升降,多在运用高倍
镜头设计
变焦镜头设计案例 本案例的公开已征得客户的同意,但关键参数无法公开,且约为90%的设计进程。 一、设计应用 单透镜反射式照相机,全画幅(像面对角线为43mm)。 二、设计要求 适用波长:可见光 EFL:75~150mm 镜片数量:不超过12片 镜片面型:全部球面 镜片材料:光学玻璃 总长度:小于254mm 最大光圈:2 后截距:大于40mm 分辨率:大于80lp/mm@0.3 调焦方式:内调焦
可加入可变光圈 三、设计特点 采用机械补偿的变焦方式,这样做与光学补偿相比,可以使系统长度更短。而且,像面可以保持不变。然而,机械补偿方式的弊端就是给机械设计带来更多难度,因每个变焦组的移动量不成线性关系,必须加入空间凸轮。 四、设计结果
上海荧沃光电科技有限公司依托北京航天大学和杭州电子科技大学,设计团队由光学工程,电子专业硕、博士和教授组成,有近十年的多领域的光学设计经验,可根据客户订制要求设计各种镜头设计,激光光路设计,望远系统,扫描光路设计和LED透镜,手电筒反光碗,路灯透镜设计加工等。我们主要运用ZEMAX、Code V 、TracePro、Lighttool等国外优秀光学设计软计,为客户提供精准、高效、低成本的光学及机械设计方案和技术支持。 照明光学业务: 订制远、近红外透镜,玻璃透镜,安防透镜,车灯透镜,LED透镜光学设计,透镜LED,直下式LED背光透镜光学设计,LED透镜设计,LED透镜光学设计, COB透镜,LED透镜,凹面透镜,凸面透镜,菲尼尔透镜光学设计与加工;路灯透镜, PMMA透镜, PC透镜, 鼠标透镜,非球面透镜设计及加工生产;透光率极高,光效极度好,无黄斑。 成像光学设计:手机镜头,照相镜头,PDA镜头设计,望远镜头,扫描仪镜头,显微镜头,投影镜头,工业镜头等镜头的设计、加工。
天津大学2020硕士研究生初试考试自命题科目大纲807工程光学与光电子学基础
一、考试模块划分方式: 考试内容分为A、B 两个模块,考生可任选其中一个模块。A 模块为工程光学,B 模块为光电子学基础。 二、各模块初试大纲: A模块:工程光学 (一)考试的总体要求 本门课程的考试旨在考核学生有关应用光学和物理光学方面的基本概念、基本理论和实际解决光学问题的能力。 考生应独立完成考试内容,在回答试卷问题时,要求概念准确,逻辑清楚,必要的解题步骤不能省略,光路图应清晰正确。 (二)考试的内容及比例 考试内容包括应用光学和物理光学两部分。 “应用光学”应掌握的重点知识包括:几何光学的基本理论和成像概念、理想光学系统理论、光学系统中的光束限制、平面和平面系统对成像的影响、像差的基本概念和典型光学系统的性质、成像关系及光束限制等。具体知识点如下: 1、掌握几何光学基本定律与成像基本概念,包括:四大基本定律及全反射的内容与现象解释;完善成像条件的概念和相关表述;几何光学符号规则以及单个折射球面、反射球面的成像公式、放大率公式等。 2、掌握理想光学系统的基本理论和典型应用,包括:基点、基面的主要类型及其特点;图解法求像的方法;解析法求像方法(牛顿公式、高斯公式);理想光学系统三个放大率的定义、计算公式及物理意义;理想光学系统两焦距之间的关系;正切计算法以及几种典型组合光组的结构特点、成像关系等。 3、掌握平面系统的主要种类及应用,包括:平面镜的成像特点及光学杠杆原理和应用;反射棱镜的种类、基本用途及成像方向判别;光楔的偏向角公式及其应用等。 4、掌握典型光学系统的光束限制分析,包括:孔径光阑、入瞳、出瞳、孔径角的定义及它们的关系;视场光阑、入窗、出窗、视场角的定义及它们的关系;渐晕、渐晕光阑、渐晕系数的定义;物方远心光路的工作原理;光瞳衔接原则及其作用;场镜的定义、作用和成像关系等。 5、了解像差基本概念,包括:像差的定义、种类和消像差的基本原则;7 种几何像差的定义、影响因素、性质和消像差方法等。 6、掌握几种典型光学系统的基本原理和特点,包括:正常眼、近视眼和远视眼的定义和特征,校正非正常眼的方法;视觉放大率的概念、表达式及其意义;显微镜系统的结构特点、成像特点、光束限制特点及主要参数的计算公式;临界照明和坷拉照明系统的组成、优缺点;望远系统的结构特点、成像特点、光束限制特点及主要参数的计算公式;摄影系统的结构特点、成像特点、光束限制特点及主要参数的计算公式;投影系统的概念、计算公式以及其照明系统的衔接条件等。 “物理光学”应掌握的重点知识包括:光的电磁理论基础、光的干涉和干涉系统、光的衍射、光的偏振和晶体光学基础等。具体知识点如下:
工程光学课程设计.
实习报告 实习名称:工程光学课程设计院系名称:电气与信息工程专业班级:测控12-1 学生姓名:张佳文 学号:20120461 指导教师:李静
黑龙江工程学院教务处制2014 年 2 月
工程光学课程设计任务书
目录 1摘要 ...................................................................... 错误!未定义书签。2物镜设计方案 . (1) 3物镜设计与相关参数 (2) 3.1物镜的数值孔径 (2) 3.2物镜的分辨率 (3) 3.3物镜的放大倍数 (4) 3.4物镜的鉴别能力 (4) 3.5设计要求参数确定 (4) 4 显微镜物镜光学系统仿真过程 (5) 4.1选择初始结构并设置参数 (5) 4.2自动优化 (5) 4.3物镜的光线像差(R AY A BERRATION)分析 (6) 4.4物镜的波像均方差(OPD)分析 (7) 4.5物镜的光学传递函数(MTF)分析 (8) 4.6物镜的几何点列图(Stop Diagrams)分析 (10) 4.7仿真参数分析 (11) 5心得体会 (11) 6参考文献 (12)
1摘要 ZEMAX是Focus Software 公司推出的一个综合性光学设计软件。这一软件集成了包括光学系统建模、光线追迹计算、像差分析、优化、公差分析等诸多功能,并通过直观的用户界面,为光学系统设计者提供了一个方便快捷的设计工具。十几年来,研发人员对软件不断开发和完善,每年都对软件进行更新,赋予ZEMAX更为强大的功能,因而被广泛用在透镜设计、照明、激光束传播、光纤和其他光学技术领域中。 ZEMAX采用序列和非序列两种模式模拟折射、反射、衍射的光线追迹。序列光线追迹主要用于传统的成像系统设计,如照相系统、望远系统、显微系统等。这一模式下,ZEMAX 以面作为对象来构建一个光学系统模型,每一表面的位置由它相对于前一表面的坐标来确定。光线从物平面开始,按照表面的先后顺序进行追迹,追迹速度很快。许多复杂的棱镜系统、照明系统、微反射镜、导光管、非成像系统或复杂形状的物体则需采用非序列模式来进行系统建模。这种模式下,ZEMAX以物体作为对象,光线按照物理规则,沿着自然可实现的路径进行追迹,可按任意顺序入射到任意一组物体上,也可以重复入射到同一物体上,直到被物体拦截。与序列模式相比,非序列光线追迹能够对光线传播进行更为细节的分析。但此模式下,由于分析的光线多,计算速度较慢。 ZEMAX 是一套综合性的光学设计仿真软件,它将实际光学系统的设计概念、优化、分析、公差以及报表整合在一起。ZEMAX 不只是透镜设计软件而已,更是全功能的光学设计分析软件,具有直观、功能强大、灵活、快速、容易使用等优点,与其它软件不同的是ZEMAX 的CAD 转文件程序都是双向的,如IGES 、STEP 、SAT 等格式都可转入及转出。而且ZEMAX可仿真Sequential 和Non-Sequential 的成像系统和非成像系统。 ZEMAX光学设计程序是一个完整的光学设计软件,是将实际光学系统的设计概念,优化,分析,公差以及报表集成在一起的一套综合性的光学设计仿真软件。包括光学设计需要的所有功能,可以在实践中对所有光学系统进行设计,优化,分析,并具有容差能力,所有这些强大的功能都直观的呈现于用户光学设计程界面中。而且工作界面简单,快捷,很方便的就能找到我们想哟实现的功能,ZEMAX功能强大,速度快,灵活方便,是一个很好的综合性程序。ZEMAX能够模拟连续和非连续成像系统及非成像系统。 2物镜设计方案 消色差物镜(Achromatic)是较常见的一种物镜,由若干组曲面半径不同的一正一负胶合透镜组成,只能矫正光谱线中红光和蓝光的轴向色差。同时校正了轴上点球差和近轴点慧差,这种物镜不能消除二级光谱,只校正黄、绿波区的球差、色差,未消除剩余色差和其他波区的球差、色差,并且像场弯曲仍很大,也就是说,只能得到视场中间范围清晰的像。使用时宜以黄绿光作照明光源,或在光程中插入黄绿色滤光片。此类物镜结构简单,经济实用,常和福根目镜、校正目镜配合使用,被广泛地应用在中、低倍显微镜上。在黑白照相时,可采用绿色滤色片减少残余的轴向色差,获得对比度好的相片。消色差通常由两个分离的双胶组合透镜组成,这类物镜也称为里斯特物镜,它的倍率一般在6×至30×
800 万像素手机镜头的zemax设计
800 万像素手机镜头的zemax设计2012.03.13 评论关闭 4,757 views 目录 [隐藏] , 1引言 , 2, 感光器件的选取 , 3, 设计指标 , 4, 设计思路 , 4.1,(, 材料选取 , 4.2,(, 初始结构选取 , 4.3,(, 优化过程 , 5, 设计结果 , 5.1,(, 光学调制传递函数 , 5.2,(, 点列图 , 5.3,(, 场曲和畸变 , 5.4,(, 色差和球差 , 5.5,(, 相对照度 , 6, 公差分析 , 7, 结论 随着手机市场对高像素手机镜头的需求增大,利用,,,,,光学设计软件设计一款大相对孔径,,,万像素的广角镜头。该镜头由,片非球面玻璃镜片,,片非球面塑料镜片,,片滤光镜片和,片保护玻璃构成。镜头光圈值,为,(,,,视场角,ω为,,?,焦距为,(,,,,,后工作距离为,(,,,。采用,,,,,, 公司的,,,,,,,型号,,,
万像素传感器,最大分辨率为,,,,×,,,,,最小像素为,(,μ,。设计结果显示:各视场的均方根差(,,,)半径小于,(,μ,,在奈奎斯特频率,,,处大多数视场的,,,值均大于,(,,畸变小于, ,,,, 畸变小于,(, ,。关键词:手机镜头;光学设计;,,,万像素;,,,,, 引言 手机镜头的研发工作始于,,世纪,,年代,世界上第一款照相手机是由夏普,,,,,,(现在的日本沃达丰)在,,,,年推出的,,,,,手机,它只搭载了一个,,万像素的,,,,数码相机镜头。随后各大手机知名制造厂商纷纷开始研发手机摄像功能。,,,,年,月,,日夏普制造了,,,万素的,,,,,,目前照相手机的市场占有率几乎是,,,,,特别是带有高像素,,、,,、,,、,, 的镜头就成为镜头研发的热点,,,。目前,,,万像素的手机市场占有率还不是太多,但随着人们对高端手机的需求量越来越大,,,,万像素手机肯定是主流趋势。鉴于此,在选用合理初始结构的基础上,优化出了一款,,,万像素的手机镜头。 , 感光器件的选取 感光器件有,,,(电荷耦合器件)和,,,,(互补金属氧化物半导体)两种。,,,,器 件产生的图像质量相比于,,,来说要低一些,到目前为止,大多数消费级别以及高端数码相机都使用,,,作为感光元件;,,,,感应器则作为低端产品 应用于一些摄像镜头上,目前随着,,,,技术的日益成熟,也有一些高端数码产品使用,,,,器件。,,,,相对于,,,有很多优点,比如价格低、集成化程度高、体积小、质量轻、功耗低、无光晕、高读出速率等,,,。所以很多手机生产商都采用,,,,器件作为手机镜头的图像传感器。目前,,,,芯片的尺寸越做越小,相应的像素尺寸也越来越小,分辨率反而越来越高。 现在国际上,,,,生产厂家主要有,,,,,,、,,,,,,,,,,、,,,,;,,、,,,,,,,等,本文采用,,,,,,公司的 ,,,,,,, 型号 ,(,,,,(,,,(,,,;,),该款传感器采用超低
LED(Tracepro官方LED建模光学仿真设计教程)
Requirements Models: None Properties: None Editions: TracePro LC, Standard and Expert Introduction In this example you will build a source model for a Siemens LWT676 surface mount LED based on the manufacturer’s data sheet. The dimensions will be used to build a solid model and the source output will be defined to match the LED photometric curve. Copyright ? 2013 Lambda Research Corporation.
Create a Thin Sheet First analyze the package to determine the best method of constructing the geometry in TracePro. The symmetry of the package suggests starting from a Thin Sheet and extruding the top and bottom halves with a small draft angle. Construct Thin Sheet in the XY plane. 1. Start TracePro 2. Select View|Profiles|XY or click the View XY button on the toolbar, and switch to silhouette mode, View|Silhouette. 3. Select Insert|Primitive Solid and select the Thin Sheet tab. 4. Enter the four corners of the Thin Sheet in mm in the dialog box, as shown below, and click Insert. 5. Click the Zoom All button or select View|Zoom|All to see the new object.
2019河北工业大学考研大纲-822 工程光学基础
河北工业大学2019年硕士研究生招生考试 自命题科目考试大纲 科目代码:822 科目名称:工程光学基础 适用专业:仪器科学与技术、仪器仪表工程(专业学位) 一、考试要求 工程光学基础适用于河北工业大学机械工程学院仪器科学与技术专业、仪器仪表工程(专业学位)专业硕士研究生招生专业课考试。主要考察对于工程光学基础的基本概念、方法及运用所学知识分析问题和解决问题的能力。 二、考试形式 试卷采用客观题型和主观题型相结合的形式,主要包括选择题、填空题、判断题、简答题、计算题、分析论述题、设计题等。考试时间为3小时,总分为150分。 三、考试内容 (一)几何光学基本定律与成像概念 1、几何光学的基本定律:折射定律、反射定律、全反射定律、马吕斯定律、费马原理等。 2、几何光学的基本概念:光波、折射率等。 (二)光线光路计算及近轴区成像 1、单个折射球面光线计算 能够利用公式进行实际光路中的光线轨迹运算。 2、近轴区单个折射球面及球面系统的成像物象位置关系计算 能够利用光线追迹计算结果初步判断光学系统的像差;能够利用近轴区的各种公式计算像的位置,像的大小并判断像的虚实。 (三)理想光学系统
1、理想光学系统的基本理论 能够利用共线成像理论求解基点和基面,并完成图解法求像。 2、理想光学系统的解析法求像 能够利用工作理想光学系统的各种计算公式计算理想光学系统的物象位置关系、计算像的大小、位置并判断像的虚实;能够利用节点的性质进行实际问题的分析。 3、光学系统的组合 利用两个理想光学组合等效系统的基点和基面的几何求解方法求解任何所需要的透镜。利用正切法将三个及以上系统的组合等效系统求解。 4、透镜 能够利用透镜的相关公式求解透镜的焦距和基点位置。 (四)平面与平面元件 1、平面元件简介 能够利用平面镜的成像特性解释各种有关平面镜的光学现象及成像特点。能够利用平面镜的旋转性、平移性、双面镜的成像特性进行系统设计。 2、平行平板 能够平行平板成像公式及成像特性解释有关光学现象并应用到实际之中。 3、反射棱镜及像方坐标系求解 能够利用反射棱镜像方坐标系及透镜在不同情况下的像方坐标系的求解方法求解系统的像方坐标系;能够利用棱镜的光学系统的成像方法进行光学系统分析。 4、折射棱镜及光楔 利用折射棱镜最小偏向角的原理解决实际光学问题;学生能够利用光楔的作用分析其在光学系统中的作用。
光学课程设计 ——望远镜系统
望远镜系统结构设计 指导教师: 张 翔 专 业:光信息科学与技术 班 级:光信息08级1班 姓 名: 学 号: 20080320 光学课程设计
目录 第一部分设计背景 (1) 第二部分设计目的及意义 (1) 第三部分望远镜介绍 (1) 3.1望远镜定义 (1) 3.2望远镜分类及相应工作原理 (2) 第四部分望远镜系统设计 (3) 4.1开普勒望远镜 (3) 4.2望远镜系统常用参数 (4) 4.3外形尺寸计算 (6) 4.4伽利略望远镜 (8) 4.5物镜组的选取 (9) 4.6望远镜像差类型及主要结构 (10) 4.7双胶物镜与双分离物镜分析 (12) 4.8内调焦望远物镜分析 (14) 4.9目镜组的选取 (14) 4.10目镜主要像差及分析 (17) 4.11棱镜转像系统 (17) 4.12转折形式望远镜系统 (18) 4.13光学系统初始结构参数计算方法 (18) 4.14应用光学系统中的光栅 (20) 第五部分设计总结 (21) 第六部分参考文献 (21)
一.设计背景 在现在科学技术中,以典型精密仪器透镜、反射镜、棱镜等及其组合为关键部分的大口径光电系统的应用越来越广泛。如:天文、空间望远镜;地基空间目标探测与识别;激光大气传输、惯性约束聚变装置等等。 其中我国以高功率激光科研和激光核聚变研究为目的的光电系统——“神光二号”,颇具代表。“神光二号”对于未来的能源危机和我国的军事领域有着重要意义。 二.设计目的及意义 运用应用光学知识,了解望远镜工作原理的基础上,完成望远镜外形尺寸、 物镜组、目镜组及转像系统的简易或远离设计。了解光学设计中的PW法基本原理。 三.望远镜介绍 3.1 望远镜定义 望远镜是一种用于观察远距离物体的目视光学仪器,能把远物很小的张角按一定倍率放大,使之在像空间具有较大的张角,使本来无法用肉眼看清或分辨的物体变清晰可辨。所以,望远镜是天文和地面观测中不可缺少的工具。它是一种通过物镜和目镜使入射的平行光束仍保持平行射出的光学系统。根据望远镜原理一般分为三种。一种通过收集电磁波来观察遥远物体的仪器。在日常生活中,望远镜主要指光学望远镜。但是在现代天文学中,天文望远镜包括了射电望远镜,红外望远镜,X射线和伽吗射线望远镜。近年来天文望远镜的概念又进一步地延伸到了引力波,宇宙射线和暗物质的领域。或者再经过一个放大目镜进行观察。日常生活中的光学望远镜又称“千里镜”。它主要包括业余天文望远镜,观剧望远镜和军用双筒望远镜。 【望远镜基本工作示意图】
800 万像素手机镜头的zemax设计
800 万像素手机镜头的zemax设计 2012.03.13 评论关闭4,757 views 目录 [隐藏] ?1引言 ?21感光器件的选取 ?32设计指标 ?43设计思路 ? 4.13.1材料选取 ? 4.23.2初始结构选取 ? 4.33.3优化过程 ?54设计结果 ? 5.14.1光学调制传递函数 ? 5.24.2点列图 ? 5.34.3场曲和畸变 ? 5.44.4色差和球差 ? 5.54.5相对照度 ?65公差分析 ?76结论 随着手机市场对高像素手机镜头的需求增大,利用Zemax光学设计软件设计一款大相对孔径800万像素的广角镜头。该镜头由1片非球面玻璃镜片,3片非球面塑料镜片,1片滤光镜片和1片保护玻璃构成。镜头光圈值F为2.45,视场角2ω为68°,焦距为4.25mm,后工作距离为0.5mm。采用APTINA公司的MT9E013型号800万像素传感器,最大分辨率为3264×2448,最小像素为1.4μm。设计结果显示:各视场的均方根差(RMS)半径小于1.4μm,在奈奎斯特频率1/2处大多数视场的MTF值均大于0.5,畸变小于2%,TV畸变小于0.3%。 关键词:手机镜头;光学设计;800万像素;Zemax 引言 手机镜头的研发工作始于20世纪90年代,世界上第一款照相手机是由夏普JPHONE(现在的日本沃达丰)在2001年推出的JSH04手机,它只搭载了一个11万像素的COMS数码相机镜头。随后各大手机知名制造厂商纷纷开始研发手机摄像功能。2003年5月22日夏普制造了100万素的JSH53,目前照相手机的市场占有率几乎是100%,特别是带有高像素2M、3M、5M、8M的镜头就成为镜头研发的热点[1]。目前800万像素的手机市场占有率还不是太多,但随着人们对高端手机的需求量越来越大,800万像素手机肯定是主流趋势。鉴于此,在选用合理初始结构的基础上,优化出了一款800万像素的手机镜头。 1感光器件的选取 感光器件有CCD(电荷耦合器件)和CMOS(互补金属氧化物半导体)两种。CMOS器件产生的图像质量相比于CCD来说要低一些,到目前为止,大多数消费级别以及高端数码相机都使用CCD作为感光元件;CMOS感应器则作为低端产品
光学设计教程小知识点
1.2光学系统有哪些特性参数和结构参数? 特性参数:(1)物距L(2)物高y或视场角ω(3)物方孔径角正弦sinU或光速孔径角h(4)孔径光阑或入瞳位置(5)渐晕系数或系统中每一个的通光半径 结构参数:每个曲面的面行参数(r,K,a4,a6,a8,a10)、各面顶点间距(d)、每种介质对指定波长的折射率(n)、入射光线的位置和方向 1.3轴上像点有哪几种几何像差? 轴向色差和球差 1.4列举几种主要的轴外子午单色像差。 子午场曲、子午慧差、轴外子午球差 1.5什么是波像差?什么是点列图?它们分别适用于评价何种光学系统的成像质量? 波像差:实际波面和理想波面之间的光程差作为衡量该像点质量的指标。适用单色像点的成像。 点列图:对于实际的光学系统,由于存在像差,一个物点发出的所有光线通过这个光学系统以后,其像面交点是一弥散的散斑。适用大像差系统 2.1叙述光学自动设计的数学模型。 把函数表示成自变量的幂级数,根据需要和可能,选到一定的幂次,然后通过实验或数值计算的方法,求出若干抽样点的函数值,列出足够数量的方程式,求解出幂级数的系数,这样,函数的幂级数形式即可确定。像差自动校正过程,给出一个原始系统,线性近似,逐次渐进。 2.2适应法和阻尼最小二乘法光学自动设计方法各有什么特点,它们之间有什么区别? 适应法:参加校正的像差个数m必须小于或等于自变量个数n,参加校正的像差不能相关,可以控制单个独立的几何像差,对设计者要求较高,需要掌握像差理论阻尼最小二乘法:不直接求解像差线性方程组,把各种像差残量的平方和构成一个评价函数Φ。通过求评价函数的极小值解,使像差残量逐步减小,达到校正像差的目的。它对参加校正的像差数m没有限制。 区别:适应法求出的解严格满足像差线性方程组的每个方程式;如果m>n或者两者像差相关,像差线性方程组就无法求解,校正就要中断。 3.1序列和非序列光线追迹各有什么特点? 序列光线追迹主要用于传统的成像系统设计。以面作为对象,光线从物平面开始,按照表面的先后顺序进行追迹,对每个面只计算一次。光线追迹速度很快。 非序列光线追迹主要用于需考虑散射和杂散光情况下,非成像系统或复杂形状的物体。以物体作为对象,光线按照物理规则,沿着自然可实现的路径进行追迹。计算时每一物体的位置由全局坐标确定。非序列光线追迹对光线传播进行更为细节的分析,计算速度较慢。3.2叙述采用光学自动设计软件进行光学系统设计的基本流程。 (1)建立光学系统模型: 系统特性参输入:孔径、视场的设定、波长的设定 初始结构输入:表面数量及序号、面行、表面结构参数输入 (2)像质评价 (3)优化:设置评价函数和优化操作数、设置优化变量、进行优化 (4)公差分析:公差数据设置、执行公差分析 3.3Zemax软件采用了什么优化算法? 构造评价函数:最小二乘法、正交下降法(非序列光学系统)
《工程光学基础》考试大纲
《工程光学基础》考试大纲 主要参考书目 1.工程光学基础教程,郁道银,谈恒英,机械工业出版社,2008 2.工程光学(第4版),郁道银,谈恒英,机械工业出版社,2016 考试内容和考试要求 一、几何光学基本定律与成像概念 考试内容: 1、几何光学基本定律 2、成像基本概念与完善成像 3、近轴光学系统 考试要求: 1、掌握光学基本定律及几何光学基本概念 2、掌握成像概念与完善成像条件 3、掌握近轴光线及成像特点、掌握光轴光线成像计算 二、理想光学系统 考试内容 1、理想光学系统的基点与基面 2、理想光学系统的物像关系 3、理想光绪系统的放大率 4、理想光学系统的组合 考试要求: 1、掌握理想光学系统的基点与基面概念 2、掌握理想光学系统的求物像关系(作图法与计算法) 3、掌握理想光绪系统的放大率概念与相关计算 4、理解理想光学系统的组合方法及计算 三、平面系统 考试内容 1、平面镜成像
2、平行平板 3、反射棱镜 4、折射棱镜与光楔 考试要求: 1、掌握平面镜成像规律 2、掌握平行平板成像规律 3、掌握反射棱镜成像与成像方向判断 4、了解折射棱镜与光楔传光特性 四、光学系统中的光阑和光束限制 考试内容 1、光阑 2、照相系统中的光阑 3、望远镜系统中成像光束的选择 4、显微镜系统中的光束限制与分析 考试要求: 1、掌握光阑的分类及作用 2、掌握照相系统中光束限制分析 3、掌握望远镜系统中成像光束分析方法 4、掌握显微镜系统中的光束限制与分析 五、光度学 考试内容 1、辐射量与光学量及其单位 2、光传播过程中光学量的变化规律 3、成像系统像面的光照度 考试要求: 1、掌握光学量及其单位 2、理解光传播过程中光学量的变化规律 3、理解成像系统像面的光照度的计算 六、典型光学系统 考试内容 1、眼睛及其光学系统
光学课程设计望远镜系统结构参数设计
光学课程设计 ——望远镜系统结构参数设计
一设计背景:在现在科学技术中,以典型精密仪器透镜、反射镜、棱镜等及其组合为关键部分的大口径光电系统的应用越来越广泛。如:天文、空间望远镜;地基空间目标探测及识别;激光大气传输、惯性约束聚变装置等等…… 二设计目的及意义 (1)、熟悉光学系统的设计原理及方法; (2)、综合应用所学的光学知识,对基本外形尺寸计算,主要考虑像质或相差;
(3)、了解和熟悉开普勒望远镜和伽利略望远镜的基本结构及原理,根据所学的光学知识(高斯公式、牛顿公式等)对望远镜的外型尺寸进行基本计算; (4)、通过本次光学课程设计,认识和学习各种光学仪器(显微镜、潜望镜等)的基本测试步骤; 三设计任务 在运用光学知识,了解望远镜工作原理的基础上,完成望远镜的外形尺寸、物镜组、目镜组及转像系统的简易或原理设计。并介绍光学设计中的PW法基本原理。同时对光学系统中存在的像差进行分析。四望远镜的介绍 1.望远镜系统:望远镜是一种利用凹透镜和凸透镜观测遥远物体的光学仪器。利用通过透镜的光线折射或光线被凹镜反射使之进入小孔并会聚成像,再经过一个放大目镜而被看到。又称“千里镜”。望远镜的第一个作用是放大远处物体的张角,使人眼能看清角距更小的细节。望远镜第二个作用是把物镜收集到的比瞳孔直径(最大8毫米)粗得多的光束,送入人眼,使观测者能看到原来看不到的暗弱物体。2.望远镜的一般特性 望远镜的光学系统简称望远系统,是由物镜和目镜组成。当用在观测无限远物体时, 物镜的像方焦点和目镜的物方焦点重合,光学间隔d=o。当月在观测有限距离的物体时, 两系统的光学问隔是一个不为零的小数量。作为一般的研究,可以认
双胶合望远镜头设计要点
XX大学 课程设计说明书 201X/201X 学年第 1 学期 学院:信息与通信工程学院 专业:XXXXXXXX 学生姓名:XXXXX 学号:XXXXX 课程设计题目:双胶合望远镜头设计 起迄日期:20XX年12月22日~20XX年01月02日课程设计地点:XX大学5院楼513、606 指导教师:XXXX 职称: 教授
摘要 (1) 关键词 (1) 第一章课题要求 1.1课题背景 (2) 1.2设计目的 (2) 1.3设计内容和要求 (2) 第二章方案分析 2.1课题名称 (3) 2.2主要数据 (3) 2.3设计思路 (3) 2.4实现原理 (3) 2.5主要过程 (4) 第三章光学系统设计 3.1光圈参数设定 (5) 3.2视场参数设定 (5) 3.3波长设定 (6) 3.4玻璃厚度的设定 (6) 3.5像空间的设定 (7) 第四章光学系统分析 4.1 2D光路分布草图 (7) 4.2 标准点列图Spot Diagram (8) 4.3 光路图OPD FAN (9) 4.4 光线相差图RAY FAN (10) 4.5波前分布图 (11) 第五章光学系统优化 5.1光学系统调焦 (12) 5.2设置可变参数 (13) 5.3优化函数设定 (13) 5.4最终优化 (14) 第六章系统优化前后比较 6.1优化后的2D草图 (15) 6.2优化后的标准点列 (15) 6.3优化后光路图 (16) 第七章心得体会 心得体会 (17)
ZEMAX是一款多功能的光学设计软件,可建立反射、折射、绕射等光学模型,可以用来模拟、分析和辅助设计光学系统,并对光学系统进行优化。双胶合透镜不仅有较好的横向分辨率,而且有较高的轴向分辨率,能够作为共焦3-D成像的一种理想光学元件,在光学领域得到了广泛的应用。本次课程设计,我们将利用ZEMAX软件设计一个双胶合望远镜头,展示利用ZEMAX设计、分析和优化一个简单光学系统的过程,进一步掌握该软件。 关键词:ZEMAX双胶合望远镜头光学系统设计分析
工程光学基础教程-习题答案(完整)
第一章 几何光学基本定律 1. 已知真空中的光速c =38 10?m/s ,求光在水(n=1.333)、冕牌玻璃(n=1.51)、火石玻璃(n=1.65)、加拿大树胶(n=1.526)、金刚石(n=2.417)等介质中的光速。 解: 则当光在水中,n=1.333时,v=2.25 m/s, 当光在冕牌玻璃中,n=1.51时,v=1.99 m/s, 当光在火石玻璃中,n =1.65时,v=1.82 m/s , 当光在加拿大树胶中,n=1.526时,v=1.97 m/s , 当光在金刚石中,n=2.417时,v=1.24 m/s 。 2. 一物体经针孔相机在 屏上成一60mm 大小的像,若将屏拉远50mm ,则像的大小变为70mm,求屏到针孔的初始距离。 解:在同种均匀介质空间中光线直线传播,如果选定经过节点的光线则方向不变,令屏到针孔的初始距离为x ,则可以根据三角形相似得出: ,所以x=300mm 即屏到针孔的初始距离为300mm 。 3. 一厚度为200mm 的平行平板玻璃(设n =1.5),下面放一直径为1mm 的金属片。若在玻璃板上盖一圆形的纸片,要求在玻璃板上方任何方向上都看不到该金属片,问纸片的最小直径应为多少? 2211sin sin I n I n = 66666.01 sin 2 2== n I 745356.066666.01cos 22=-=I 1mm I 1=90? n 1 n 2 200mm L I 2 x
88.178745356 .066666 .0* 200*2002===tgI x mm x L 77.35812=+= 4.光纤芯的折射率为1n ,包层的折射率为2n ,光纤所在介质的折射率为0n ,求光纤的数值孔径(即10sin I n ,其中1I 为光在光纤内能以全反射方式传播时在入射端面的最大入射角)。 解:位于光纤入射端面,满足由空气入射到光纤芯中,应用折射定律则有: n 0sinI 1=n 2sinI 2 (1) 而当光束由光纤芯入射到包层的时候满足全反射,使得光束可以在光纤内传播,则有: (2) 由(1)式和(2)式联立得到n 0 . 5. 一束平行细光束入射到一半径r=30mm 、折射率n=1.5的玻璃球上,求其会聚点的位置。如果在凸面镀反射膜,其会聚点应在何处?如果在凹面镀反射膜,则反射光束在玻璃中的会聚点又在何处?反射光束经前表面折射后,会聚点又在何处?说明各会聚点的虚实。 解:该题可以应用单个折射面的高斯公式来解决, 设凸面为第一面,凹面为第二面。 (1)首先考虑光束射入玻璃球第一面时的状态,使用高斯公式: 会聚点位于第二面后15mm 处。 (2) 将第一面镀膜,就相当于凸面镜
光学课程设计报告
光学课程设计报告 姓名: 班级: 学号:
一.设计目的 (1)重点掌握设计光学系统的思路。初步掌握简单的、典型的系统设计的基本技能,熟练掌握光线光路计算技能,了解并熟悉光学设计中所有例行工作,如数据结果处理、像差曲线绘制、光学零件技术要求等。 (2)在熟练掌握基本理论知识的基础上,通过上机实训,锻炼自己的动手能力。在摸索的过程中,进一步培养优化数据的能力和理论联系实际的能力。 (3)巩固和消化应用光学和本课程中所学的知识,牢固掌握典型光学系统的特点,并初步接触以后可能用到的光学系统,为学习专业课打下好的基础。 二.设计题目 双筒棱镜望远镜设计(望远镜的物镜和目镜的选型和设计) 三.技术要求 双筒棱镜望远镜设计,采用普罗I 型棱镜转像,系统要求为: (1)望远镜的放大率Γ=6 倍; (2)物镜的相对孔径D/f′=1:4(D 为入瞳直径,D=30mm); (3)望远镜的视场角2ω=8°; (4)仪器总长度在110mm 左右,视场边缘允许50%的渐晕; (5)棱镜最后一面到分划板的距离>=14mm,棱镜采用K9 玻璃,两棱 镜间隔为2~5mm; (6)lz′=8~10mm。
七.上机结果 1.物镜 (1)优化前数据 程序注释: 设计时间:2013年4月10日星期三 08:59:50 下午 -------输入数据-------- 1.初始参数 物距半视场角(°) 入瞳半径 0 4 15 系统面数色光数实际入瞳上光渐晕下光渐晕 7 3 0 1 -1 理想面焦距理想面距离 0 0 面序号半径厚度玻璃 STO 84.5460 5.741 1 2 -44.9920 2.652 K9 3 -134.9690 56.800 F5 4 0.0000 33.500 1 5 0.0000 4.000 K9 6 0.0000 33.500 1 7 0.0000 12.630 K9 ☆定义了下列玻璃:
天津大学2018年《807工程光学》考研大纲
天津大学2018年《807工程光学》考研大纲 一、考试的总体要求 本门课程的考试旨在考核学生有关应用光学和物理光学方面的基本概念、基本理论和实际解决光学问题的能力。 考生应独立完成考试内容,在回答试卷问题时,要求概念准确,逻辑清楚,必要的解题步骤不能省略,光路图应清晰正确。 二、考试的内容及比例: 考试内容包括应用光学和物理光学两部分。 “应用光学”应掌握的重点知识包括:几何光学的基本理论和成像概念、理想光学系统理论、光学系统中的光束限制、平面和平面系统对成像的影响、像差的基本概念和典型光学系统的性质、成像关系及光束限制等。具体知识点如下: 1、掌握几何光学基本定律与成像基本概念,包括:四大基本定律及全反射的内容与现象解释;完善成像条件的概念和相关表述;几何光学符号规则以及单个折射球面、反射球面的成像公式、放大率公式等。 2、掌握理想光学系统的基本理论和典型应用,包括:基点、基面的主要类型及其特点;图解法求像的方法;解析法求像方法(牛顿公式、高斯公式);理想光学系统三个放大率的定义、计算公式及物理意义;理想光学系统两焦距之间的关系;正切计算法以及几种典型组合光组的结构特点、成像关系等。 3、掌握平面系统的主要种类及应用,包括:平面镜的成像特点及光学杠杆原理和应用;反射棱镜的种类、基本用途及成像方向判别;光楔的偏向角公式及其应用等。 4、掌握典型光学系统的光束限制分析,包括:孔径光阑、入瞳、出瞳、孔径角的定义及它们的关系;视场光阑、入窗、出窗、视场角的定义及它们的关系;渐晕、渐晕光阑、渐晕系数的定义;物方远心光路的工作原理;光瞳衔接原则及其作用;场镜的定义、作用和成像关系等。 5、了解像差基本概念,包括:像差的定义、种类和消像差的基本原则;7种几何像差的定义、影响因素、性质和消像差方法等。 6、掌握几种典型光学系统的基本原理和特点,包括:正常眼、近视眼和远视眼的定义和特征,校正非正常眼的方法;视觉放大率的概念、表达式及其意义;显微镜系统的结构特点、成像特点、光束限制特点及主要参数的计算公式;临界照明和坷拉照明系统的组成、优缺点;望远系统的结构特点、成像特点、光束限制特点及主要参数的计算公式;摄影系统的结构特点、成像特点、光束限制特点及主要参数的计算公式;投影系统的概念、计算公式以及其照明系统的衔接条件等。 “物理光学”应掌握的重点知识包括:光的电磁理论基础、光的干涉和干涉系统、光的衍射、光的偏振和晶体光学基础等。其中傅立叶光学一章可作为部分专业(如:光科等)的选作内容。具体知识点如下: 1、掌握电磁波的平面波解,包括:平面波、简谐波解的形式和意义,物理量的关系,电磁波的性质等;掌握波的叠加原理、计算方法和4种情况下两列波的叠加结果、性质分析。 2、掌握干涉现象的定义和形成干涉的条件;掌握杨氏双缝干涉性质、装置、公式、条纹特 点及其现象的应用;了解条纹可见度的定义、影响因素及其相关概念(包括临界宽度和允许宽度、空