图像合成原理及其实现
图像合成原理及其实现
1 引言
图像融合是指将多源信道所采集到的关于同一目标的图像经过一定的处理,提取各自信道的信息,最后综合成同一图像以供观察或进一步处理,图像的合成则是其基础。同样,在Photoshop软件中图像合成相关技术,如蒙板、不透明度、羽化与渐变等也起着十分重要的作用。
本文拟从图像处理的角度分析它们的原理,并介绍它们在Win32编程环境下的实现。
2 位图函数
图像的合成在图像处理中属于图像的代数/逻辑运算,即两幅图像对应像素间的运算[2][3]。因此,要求参与运算的图像必须类型与尺寸都一致。尺寸的一致可以通过裁剪或缩放来实现。类型的不同则需要作相应的转换。
在16位的Windows 3.x中图像通常存放在设备无关位图(DIB)中,它只能存放像素数据无法支持图形功能,其中的BitBlt函数只能拷贝图像而不能进行图像类型的转换,使用十分不便。
在32位的Win32中,图像一般存放在新型位图DIBSection中,它既具设备无关位图(DIB)可存放像素数据的特点,又具设备相关位图(DDB)具有图形功能的优点,其中的BitBlt函数既能拷贝图像又能进行图像类型的转换,像素数据在传递过程中还可以进行多种逻辑运算。这是图像合成中使用十分频繁的函数。图像尺寸的改变可采用StretchBlt函数,它可以进行缩放,同时也可进行图像类型的转换,但不支持逻辑运算功能。对于类型与尺寸不一致的图像需要用BitBlt与StretchBlt函数先行统一。
3 图像合成
3.1 图像的Alpha混合
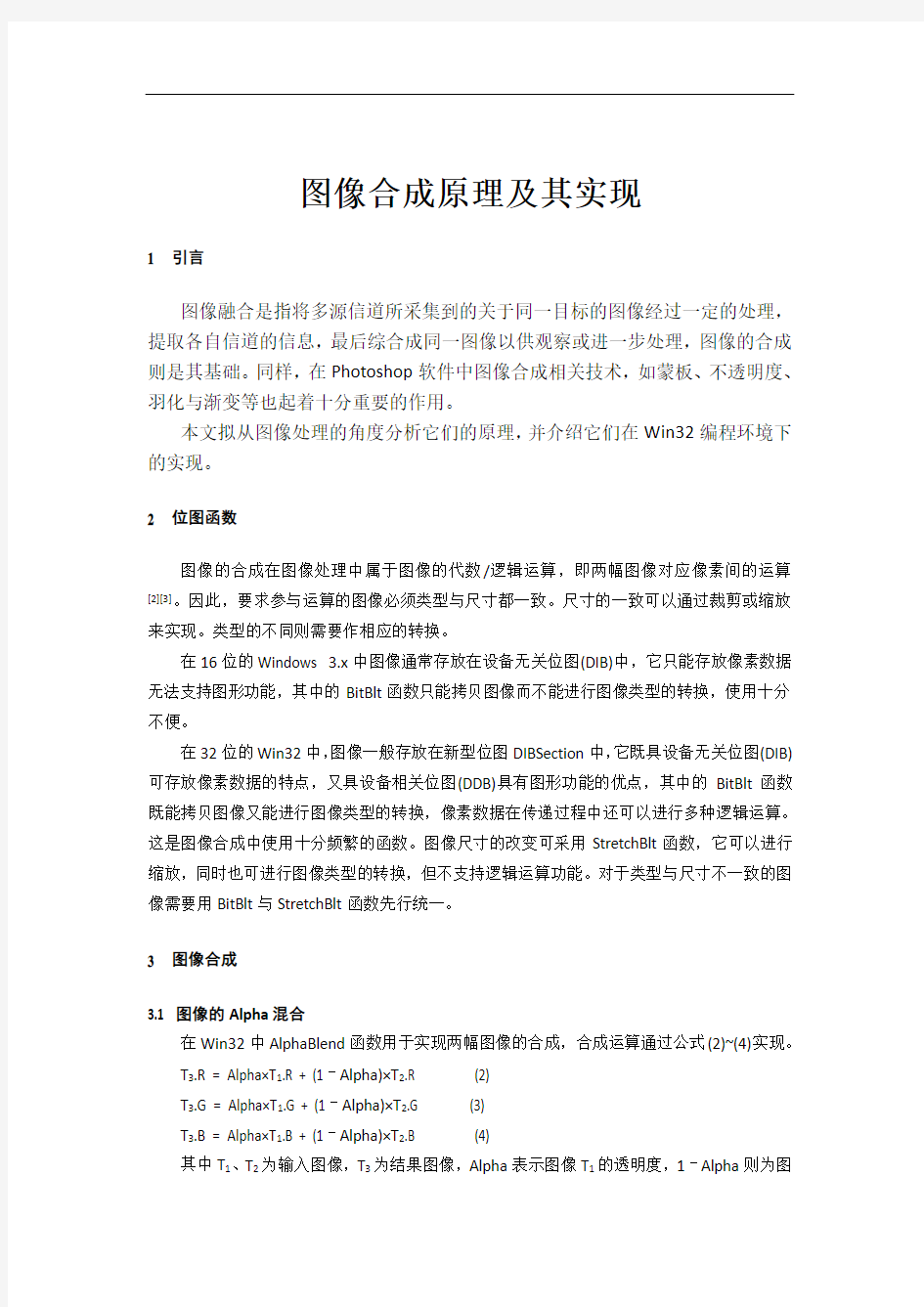
在Win32中AlphaBlend函数用于实现两幅图像的合成,合成运算通过公式(2)~(4)实现。
T3.R = Alpha×T1.R + (1–Alpha)×T2.R (2)
T3.G = Alpha×T1.G + (1–Alpha)×T2.G (3)
T3.B = Alpha×T1.B + (1–Alpha)×T2.B (4)
其中T1、T2为输入图像,T3为结果图像,Alpha表示图像T1的透明度,1–Alpha则为图
像T2的透明度。直观地说,图像合成可以看成各图像在具有一定透明度的滤光片覆盖下分别暴光所得结果的叠加。此时,T1使用透明度Alpha的滤光片,T2使用透明度1–Alpha的滤光片分两次暴光得到T3。
其次,由于红绿蓝3分量的计算公式相同,所以真彩色图像的合成等价于3倍宽度的灰阶图像的合成。合成公式实际上只需要一个,例如公式(2)。比较公式(1)与(2)可知,从图像处理的角度看,图像的合成可看作两幅输入图像互补的灰度线性变换的叠加。
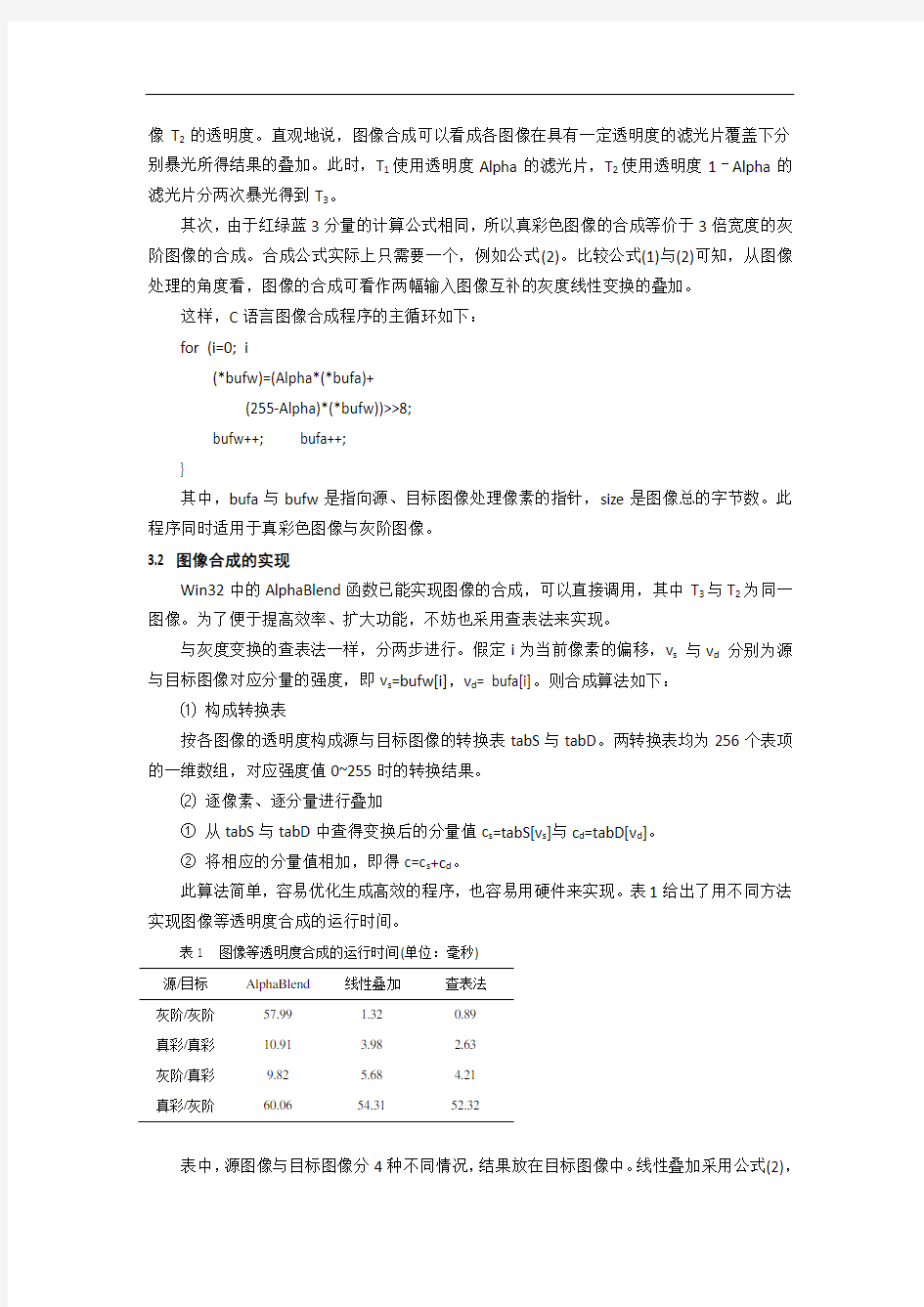
这样,C语言图像合成程序的主循环如下:
for (i=0; i (*bufw)=(Alpha*(*bufa)+ (255-Alpha)*(*bufw))>>8; bufw++; bufa++; } 其中,bufa与bufw是指向源、目标图像处理像素的指针,size是图像总的字节数。此程序同时适用于真彩色图像与灰阶图像。 3.2 图像合成的实现 Win32中的AlphaBlend函数已能实现图像的合成,可以直接调用,其中T3与T2为同一图像。为了便于提高效率、扩大功能,不妨也采用查表法来实现。 与灰度变换的查表法一样,分两步进行。假定i为当前像素的偏移,v s与v d分别为源与目标图像对应分量的强度,即v s=bufw[i],v d= bufa[i]。则合成算法如下: ⑴构成转换表 按各图像的透明度构成源与目标图像的转换表tabS与tabD。两转换表均为256个表项的一维数组,对应强度值0~255时的转换结果。 ⑵逐像素、逐分量进行叠加 ①从tabS与tabD中查得变换后的分量值c s=tabS[v s]与c d=tabD[v d]。 ②将相应的分量值相加,即得c=c s+c d。 此算法简单,容易优化生成高效的程序,也容易用硬件来实现。表1给出了用不同方法实现图像等透明度合成的运行时间。 表1 图像等透明度合成的运行时间(单位:毫秒) 源/目标AlphaBlend 线性叠加查表法 灰阶/灰阶57.99 1.32 0.89 真彩/真彩10.91 3.98 2.63 灰阶/真彩9.82 5.68 4.21 真彩/灰阶60.06 54.31 52.32 表中,源图像与目标图像分4种不同情况,结果放在目标图像中。线性叠加采用公式(2), 查表法为本节所述方法。 比较表中第3第4行,第4行的运行时间都比第3行长,原因在于源与目标图像属不同类型,合成过程中需要作类型转换。由此可见,用BitBlt函数将真彩色图像转换为灰阶图像比反过程要慢许多。其次,左上角灰阶图像的合成反而比真彩色图像的合成更慢,说明AlphaBlend函数主要适用于真彩色图像的合成,用于灰阶图像时反而需要作附加的转换影响合成速度。最后,上面3种情况下查表法都比线性叠加快三分之一左右。图1中(c)为(a)与(b)的合成图像,全图的透明度相同。 源图像1 源图像2 合成图像3 合成孔径雷达概述 1合成孔径雷达简介 (2) 1.1 合成孔径雷达的概念 (2) 1.2 合成孔径雷达的分类 (3) 1.3 合成孔径雷达(SAR)的特点 (4) 2合成孔径雷达的发展历史 (5) 2.1 国外合成孔径雷达的发展历程及现状 (5) 2.1.1 合成孔径雷达发展历程表 (6) 2.1.2 世界各国的SAR系统 (9) 2.2 我国的发展概况 (11) 2.2.1 我国SAR研究历程表 (11) 2.2.2 国内各单位的研究现状 (12) 2.2.2.1 电子科技大学 (12) 2.2.2.2 中科院电子所 (12) 2.2.2.3 国防科技大学 (13) 2.2.2.4 西安电子科技大学 (13) 3 合成孔径雷达的应用 (13) 4 合成孔径雷达的发展趋势 (14) 4.1 多参数SAR系统 (15) 4.2 聚束SAR (15) 4.3极化干涉SAR(POLINSAR) (16) 4.4合成孔径激光雷达(Synthetic Aperture Ladar) (16) 4.5 小型化成为星载合成孔径雷达发展的主要趋势 (17) 4.6 性能技术指标不断提高 (17) 4.7 多功能、多模式是未来星载SAR的主要特征 (18) 4.8 雷达与可见光卫星的多星组网是主要的使用模式 (18) 4.9 分布SAR成为一种很有发展潜力的星载合成孔径雷达 (18) 4.10 星载合成孔径雷达的干扰与反干扰成为电子战的重要内容 (19) 4.11 军用和民用卫星的界线越来越不明显 (19) 5 与SAR相关技术的研究动态 (20) 5.1 国内外SAR图像相干斑抑制的研究现状 (20) 5.2 合成孔径雷达干扰技术的现状和发展 (20) 5.3 SAR图像目标检测与识别 (22) 5.4 恒虚警技术的研究现状与发展动向 (25) 5.5 SAR图像变化检测方法 (27) 5.6 干涉合成孔径雷达 (31) 5.7 机载合成孔径雷达技术发展动态 (33) 5.8 SAR图像地理编码技术的发展状况 (35) 5.9 星载SAR天线方向图在轨测试的发展状况 (37) 5.10 逆合成孔径雷达的发展动态 (38) 5.11 干涉合成孔径雷达的发展简史与应用 (38) 第四章 合成孔径雷达 合成孔径雷达(Synthetic Aperture Radar ,简称SAR )是成像雷达中应用最 多,也是本书讨论的重点。在前几章对雷达如何获取高的距离分辨率和横向分辨 的基础上,从本章开始用三章的篇幅对合成孔径雷达作较详细的讨论。 首先,结合工程实际介绍合成孔径雷达的原理。在前面的讨论中已经提到, 根据不同的要求,成像算法(特别是横向成像算法)有许多种,本章只介绍最简 单的距离-多普勒算法的原理,目的是由此联系到对合成孔径雷达系统的要求以 及工程实现方面的问题。 合成孔径雷达通常以场景作为观测对象,它与一般雷达有较大不同,我们将 在本章讨论合成孔径雷达有别于一般雷达的一些技术性能和参数。 4.1 条带式合成孔径雷达成像算法的基本原理 4.1所示,设X 轴为场景的中心 线,Q 为线上的某一点目标,载机以 高度H 平行于中心线飞行,离中心线 的最近距离B R 为 B R = (4.1) 当载机位于A 点时,它与Q 点的斜距 为 R = (4.2) 式中t X 为点目标Q 的横坐标。 当分析中心线上各个点目标的回波状况及成像算法时,可以在包括场景中心 线(即X 轴)和载机航线的平面里进行。至于场景里中心线外的情况将在后面 说明,这里暂不讨论。 一般合成孔径雷达发射线性调频(LFM )脉冲,由于载机运动使其到目标的 距离发生变化,任一点目标回波在慢时间域也近似为线性调频,而且包络时延也 几何示意图 随距离变化,即所谓距离徙动。合成孔径雷达成像算法的任务是从载机运动录取得到的快、慢时间域的回波数据,重建场景图像,它是二维匹配滤波问题。 严格考虑距离徙动的成像算法比较复杂,在实际应用中,一般均根据情况采用一些较简单的算法,这些将在第五章里系统介绍。在这里我们主要讨论分辨率较低,距离徙动影响可以忽略的最简单的情况,这时可采用简易的距离-多普勒基本算法。 所谓距离徙动的影响可以忽略不计是指雷达波束扫过某点目标的相干处理时间里,目标斜距变化引起的距离徙动值小于距离分辨单元长度的1/4~1/8,即场景中心线上所有点目标的回波(距离压缩后的)在慢时间域里均位于同一个距离单元。当然,因斜距改变引起的二次型相位变化还是需要考虑的,即系统的脉冲响应函数应考虑二次型相位。这种情况下的成像算法是比较简单的,可将回波信号先在快时间域作脉压匹配滤波,然后再对快时间域的每一个距离单元分别沿慢时间作方位压缩的匹配处理,于是得到场景的二维图像。在上面的图4.1中,我们提出只对中心线上的目标进行讨论,场景的二维图像当然包括场景里中心线以外的目标,这将在下一节里说明。 脉压匹配滤波可以在时域用回波数据与系统函数作卷积处理,也可以在频域作乘积处理,由于乘积的运算量小,同时时频域之间的傅里叶变换有FFT快速算法,频域计算用得更多。此外,由于场景有一定宽度,比发射脉冲宽度宽不少,而沿慢时间录取的数据长度一般也比波束扫过一个点目标的相干积累时间长得多,即时域信号长度比系统匹配函数长得多,这里应将信号分段处理后再加以拼接。 4.2合成孔径雷达回波的多普勒特性 信号有时域表示和频域表示,一般情况直接获取的是时域信号,通过傅里叶变换得到它的频谱。合成孔径雷达信号也是如此,快时间表示的发射信号是在时域生成,而慢时间回波则为载机运动过程中回波的变化序列。通过傅里叶变换,可以得到快时间频谱(距离谱)和慢时间频谱(多普勒谱或方位谱)。 合成孔径雷达信号有它的特殊性,它的回波为众多点目标回波的线性组合,而对一个点目标来说,其快、慢时间回波均为(或近似为)线性调频信号。对于 1.【2018新课标1卷】采用N2O5为硝化剂是一种新型的绿色硝化技术,在含能材料、医药等工业中得到广泛应用。回答下列问题 (1)1840年Devil用干燥的氯气通过干燥的硝酸银,得到N2O5。该反应的氧化产物是一种气体,其分子式为___________。 (2)F.Daniels等曾利用测压法在刚性反应器中研究了25℃时N2O5(g)分解反应: 其中NO2二聚为N2O4的反应可以迅速达到平衡。体系的总压强p随时间t的变化如下表所示(t=∞时,N2O5(g)完全分解): t/min0408016026013001700∞ p/kPa35.840.342.5. 45.949.261.262.363.1 ①已知:2N2O5(g)=2N2O4(g)+O2(g) ΔH1=?4.4kJ·mol?1 2NO2(g)=N2O4(g) ΔH2=?55.3kJ·mol?1 则反应N2O5(g)=2NO2(g)+ 1 2 O2(g)的ΔH=_______ kJ·mol?1。 ②研究表明,N2O5(g)分解的反应速率() 25 31 210?min N O p kPa υ-- =??。t=62min时,测得体系中2 O p p O2=2.9kPa,则此时的 25 N O p=________kPa,v=_______kPa·min?1。 ③若提高反应温度至35℃,则N2O5(g)完全分解后体系压强p∞(35℃)____63.1kPa(填“大于”“等 于”或“小于”),原因是________。 ④25℃时N2O4(g)2NO2(g)反应的平衡常数K p=_______kPa(K p为以分压表示的平衡常数,计算 结果保留1位小数)。 (3)对于反应2N2O5(g)→4NO2(g)+O2(g),R.A.Ogg提出如下反应历程: 第一步N2O5NO2+NO3快速平衡 第二步NO2+NO3→NO+NO2+O2慢反应 2018年高考试题 Real and Synthetic Aperture Radar Spatial Resolution (1) 距离分辨率 与真实孔径雷达距离向分辨率相同。但由于真实孔径 机载雷达一般用短脉冲来实现距离向分辨率,而合成孔 径雷达通常用带宽(脉冲频率的变化范围)为B的线性调 频脉冲来实现作用距离向的良好分辨率。 Rr = 课程设计报告 设计题目:数字图像处理中的边缘检测技术学院: 专业: 班级:学号: 学生姓名: 电子邮件: 时间:年月 成绩: 指导教师: 数字图像处理中的边缘检测技术课程设计报告I 目录 1 前言:查阅相关文献资料,了解和掌握基本原理、方法和研究现状,以及实际应用的背景意义 (1) 1.1理论背景 (1) 1.2图像边缘检测技术研究的目的和意义 (1) 1.3国内外研究现状分析 (2) 1.4常用边缘检测方法的基本原理 (3) 2 小波变换和小波包的边缘检测、基于数学形态学的边缘检测法算法原理 (7) 2.1 小波边缘检测的原理 (7) 2.2 数学形态学的边缘检测方法的原理 (7) 3 算法实现部分:程序设计的流程图及其描述 (9) 3.1 小波变换的多尺度边缘检测程序设计算法流程图 (9) 3.2 数学形态学的边缘检测方法程序设计算法描述 (10) 4实验部分:对所给的原始图像进行对比实验,给出相应的实验数据和处理结果 (11) 5分析及结论:对实验结果进行分析比较,最后得出相应的结论 (15) 参考文献 (17) 附录:代码 (18) 1前言 查阅相关文献资料,了解和掌握基本原理、方法和研究现状,以及实际应用的背景意义 1.1 理论背景 图像处理就是对图像信息加工以满足人的视觉心理或应用需求的方法。图像处理方法有光学方法和电子学方法。从20世纪60年代起随着电子计算机和计算技术的不断提高和普及,数字图像处理进入了高速发展时期,而数字图像处理就是利用数字计算机或其它的硬件设备对图像信息转换而得到的电信号进行某些数学处理以提高图像的实用性。 图像处理在遥感技术,医学领域,安全领域,工业生产中有着广泛的应用,其中在医学应用中的超声、核磁共振和CT等技术,安全领域的模式识别技术,工业中的无损检测技术尤其引人注目。 计算机进行图像处理一般有两个目的:(1)产生更适合人观察和识别的图像。 (2)希望能由计算机自动识别和理解图像。数字图像的边缘检测是图像分割、目标区域的识别、区域形状提取等图像分析领域的重要基础,图像处理和分析的第一步往往就是边缘检测。 物体的边缘是以图像的局部特征不连续的形式出现的,也就是指图像局部亮度变化最显著的部分,例如灰度值的突变、颜色的突变、纹理结构的突变等,同时物体的边缘也是不同区域的分界处。图像边缘有方向和幅度两个特性,通常沿边缘的走向灰度变化平缓,垂直于边缘走向的像素灰度变化剧烈。根据灰度变化的特点,图像边缘可分为阶跃型、房顶型和凸缘型。 1.2 图像边缘检测技术研究的目的和意义 数字图像处理是伴随着计算机发展起来的一门新兴学科,随着计算机硬件、软件的高度发展,数字图像处理也在生活中的各个领域得到了广泛的应用。边缘检测技术是图像处理和计算机视觉等领域最基本的技术,如何快速、精确的提取图像边缘信息一直是国内外研究的热点,然而边缘检测也是图像处理中的一个难题。 首先要研究图像边缘检测,就要先研究图像去噪和图像锐化。前者是为了得到飞更真实的图像,排除外界的干扰,后者则是为我们的边缘检测提供图像特征更加明显的图片,即加大图像特征。两者虽然在图像处理中都有重要地位,但本次研究主要是针对图像边缘检测的研究,我们最终所要达到的目的是为了处理速 图像处理技术原理及其在生活中的应用探讨 摘要在社会生活实践中,图像处理技术获得了广泛的应用。这种技术之所以可以得到广泛应用,与其极强的功能所分不开的。在计算机算法不断改善的过程中,图像处理技术的发展前景是非常广阔的。笔者对图像处理技术的原理进行了分析,并其对在生活中的应用进行了探究[1]。 关键词图像处理技术原理;生活;应用 1 图像处理技术的原理分析 所谓的图像处理技术,就是通过计算机技术以及相关的技术来对图像进行处理,从而使图像更好地为我们所利用的一种技术。在这个过程中,需要运用到几个技术要点。第一个就是使图像进行转换,从而得到计算机容易识别的矩阵,这种矩阵被称为是“数字矩阵”。这样得到的矩阵更容易被计算机所存储。第二就是通过多种算法来实现对计算机所存储的图像进行有关处理,其中用到的常用算法就有基于人眼视觉特性的阈值算法、具有去噪功能的图像增强算法等。第三就是在进行了一些技术性的处理,然后获取图像信息。通过中国知网、万方数据库等平台所查阅到的图像类型相关资料可知,图像的类型主要可以分为两大类,一类是数字化图像,另一类是模拟图像。前者不仅处理便捷,而且精度较高,能够适应现代社会的发展要求,后者在现实生活中的应用更为常见,比如在相机图片中的应用。模拟图像输出较为简单,灵活性和精度不太高,因此其使用的限制性较大[2]。 2 图像处理技术原理在生活中的应用探讨 2.1 图像处理技术原理在安全防范中的应用 在安全防范监控系统不断发展的过程中,系统从模拟向数字的方向发展,这跟人们要求图像的精准度越来越高有关。在安防领域,图像处理技术如果能够得到很好的利用,那么就可以实现对图像的去噪声处理,对失真的图像进行矫正处理。在公安部门破案的过程中,有时会根据犯罪现场的指纹特征来对视频采集参数进行调节,比如色彩补偿就是一种很好的调節方法,这样方便公安部门更快地破案。尽管现在的监控系统越来越完善,但是如果遇到暴风暴雨和雾霾或者光线较弱的天气,那么监控得到的视频图像往往还是比较模糊的,对于这些模糊的图像,可以通过图像增强技术进行一些处理,从而为后续的公安部门调查和取证提供便利,模糊图像处理技术这时就排上了用场[3]。 2.2 图像处理技术原理在娱乐休闲领域的应用 在娱乐休闲领域,图像处理技术原理主要的应用场合就是平时我们利用手机或数码相机摄影以及电影特效制作等场合。在数码相机出现以前,图像只能使用传统相机通过胶片的形式保存。在数码相机出现之后,人们就可以短时间内对相 第一章绪论 1.1 图像拼接技术的研究背景及研究意义 图像拼接(image mosaic)是一个日益流行的研究领域,他已经成为照相绘图学、计算机视觉、图像处理和计算机图形学研究中的热点。图像拼接解决的问题一般式,通过对齐一系列空间重叠的图像,构成一个无缝的、高清晰的图像,它具有比单个图像更高的分辨率和更大的视野。 早期的图像拼接研究一直用于照相绘图学,主要是对大量航拍或卫星的图像的整合。近年来随着图像拼接技术的研究和发展,它使基于图像的绘制(IBR)成为结合两个互补领域——计算机视觉和计算机图形学的坚决焦点,在计算机视觉领域中,图像拼接成为对可视化场景描述(Visual Scene Representaions)的主要研究方法:在计算机形学中,现实世界的图像过去一直用于环境贴图,即合成静态的背景和增加合成物体真实感的贴图,图像拼接可以使IBR从一系列真是图像中快速绘制具有真实感的新视图。 在军事领域网的夜视成像技术中,无论夜视微光还是红外成像设备都会由于摄像器材的限制而无法拍摄视野宽阔的图片,更不用说360 度的环形图片了。但是在实际应用中,很多时候需要将360 度所拍摄的很多张图片合成一张图片,从而可以使观察者可以观察到周围的全部情况。使用图像拼接技术,在根据拍摄设备和周围景物的情况进行分析后,就可以将通过转动的拍摄器材拍摄的涵盖周围360 度景物的多幅图像进行拼接,从而实时地得到超大视角甚至是360 度角的全景图像。这在红外预警中起到了很大的作用。 微小型履带式移动机器人项目中,单目视觉不能满足机器人的视觉导航需要,并且单目视觉机器人的视野范围明显小于双目视觉机器人的视野。利用图像拼接技术,拼接机器人双目采集的图像,可以增大机器人的视野,给机器人的视觉导航提供方便。在虚拟现实领域中,人们可以利用图像拼接技术来得到宽视角的图像或360 度全景图像,用来虚拟实际场景。这种基于全景图的虚拟现实系统,通过全景图的深度信息抽取,恢复场景的三维信息,进而建立三维模型。这个系统允许用户在虚拟环境中的一点作水平环视以及一定范围内的俯视和仰视,同时允许在环视的过程中动态地改变焦距。这样的全景图像相当于人站在原地环顾四周时看到的情形。在医学图像处理方面,显微镜或超声波的视野较小,医师无法通过一幅图像进行诊视,同时对于大目标图像的数据测量也需要把不完整的图像拼接为一个整体。所以把相邻的各幅图像拼接起来是实现远程数据测量和远程会诊的关键环节圆。在遥感技术领域中,利用图像拼接技术中的图像配准技术可以对来自同一区域的两幅或多幅图像进行比较,也可以利用图像拼接技术将遥感卫星拍摄到的有失真地面图像拼接成比较准确的完整图像,作为进一步研究的依据。 从以上方面可以看出,图像拼接技术的应用前景十分广阔,深入研究图像拼接技术有着很重要的意义 1.2图像拼接算法的分类 图像拼接作为这些年来图像研究方面的重点之一,国内外研究人员也提出了很多拼接算法。图像拼接的质量,主要依赖图像的配准程度,因此图像的配准是拼接算法的核心和关键。根据图像匹配方法的不同仁阔,一般可以将图像拼接算法分为以下两个类型:(1) 基于区域相关的拼接算法。 这是最为传统和最普遍的算法。基于区域的配准方法是从待拼接图像的灰度值出发,对 合成孔径雷达成像自聚焦算法的比较 【摘要】本文简要地分析和比较两类合成孔径雷达自聚焦算法的特点,并通过多点目标自聚焦成像对其进行验证,表明结论可靠。 【关键词】自聚焦算法;多点目标;孔径雷达 0 引言 SAR自聚焦算法的任务是首先要对经过处理后的未补偿的SAR信号进行相位误差估计,然后消除其相位误差。SAR自聚焦算法就其本质而言是一个二维估计问题,在公式(2)中的相位误差既是空变的又是不可分离的乘性噪声的事实使问题变得极为棘手。影响成像的几何线性,分辨率、图像对比度和信噪比的主要因素取决于相位误差的性质和大小,基于处理孔径上相位误差形式,表1给出两大类相位误差及其每一类对SAR成像的一般影响。 表1 相位误差的分类 1 几种实用的自聚焦算法的比较 一般来说,自聚焦算法可以划分为两类:基于模式算法和非参数算法。基于模式的自聚焦算法估计相位误差的模式展开系数。低阶模自聚焦仅能估计二阶相位误差,而更复杂的方法还可以估计高阶多项式相位误差。子孔径相关法(MD)和多孔经相关法(MAM)是针对低频相位误差补偿提出的基模自聚焦算法的范例。基于模式算法虽然执行起来相对简单而且算法高效。不过只能相位误差被正确估计的情况下才能保证这样的优越性。 第二类自聚焦算法,即非参数自聚焦算法,典型的有相位梯度自聚焦算法,基于最小熵准则和最大对比度准则的自聚焦方法,这些方法都不需要相位误差的先验知识。特别地,相位梯度自聚焦算法几种改进的算法。其中特征向量法是在PGA框架下运用了极大似然算子取代了原始的相位差算子核,改进的相位梯度自聚焦算法的策略通过选择一组高质量的目标以提供非迭代的PGA解。另一种方法是运用加权最小二乘法以实现相位误差最小化的PGA。适用范围扩大,计算高效。 在一些SAR应用中,相位误差显著依赖位置,空变的自聚焦的常用的方法是将大场景分成更小的子图像,每个子图像的误差近似不变的,因此,传统的空间不变的自聚焦程序可以应用到每个子图像。当重新聚焦时,个别的子图像拼接或镶嵌在一起产生完整的场景图像聚焦图像。 2 性能评价标准 第一个测试是检查在方位域一维的点目标响应。聚焦质量质量指标包括3dB 合成孔径雷达(SAR) 合成孔径雷达产生的过程 为了形成一幅真实的图像增加两个关键参数:分辨率、识别能力。 合成孔径打开了无限分辨能力的道路 相干成像特性:以幅度和相位的形式收集信号的能力 相干成像的特性可以用来进行孔径合成 民用卫星接收系统SEASA T、SIR-A、SIR-B 美国军用卫星(LACROSSE) 欧洲民用卫星(ERS系列) 合成孔径雷达(SAR)是利用雷达与目标的相对运动将较小的真实天线孔径用数据处理的方法合成一个较大孔径的等效天线孔径的雷达。 特点:全天候、全天时、远距离、和高分辨率成像并且可以在不同频段不同极化下得到目标的高分辨率图像 SAR高分辨率成像的距离高分辨率和方位高分辨率 距离分辨率取决于信号带宽 方位高分辨率取决于载机与固定目标相对运动时产生的具有线性调频性质的多普勒信号带宽 相干斑噪声 机载合成孔径雷达是合成孔径雷达的一种 极化:当一个平面将空间划分为各向同性和半无限的两个均匀介质,我们就可以定义一个电磁波的入射平面,用波矢量K来表征:该平面包含矢量K以及划分这两种介质的平面法线垂直极化(V):无线电波的振动方向是垂直方向与水平极化(H):无线电波的振动方向是水平方向 TE波:电场E与入射面垂直 TH波:电场E属于入射平面 合成孔径雷达的应用 军事上、地质和矿物资源勘探、地形测绘和制图学、海洋应用、水资源、农业和林业 合成孔径雷达在军事领域的应用:战略应用、战术应用、特种应用。 SAR系统的几个发展趋势:多波段、多极化、多视角、多模式、多平台、高分辨率成像、实时成像。 SAR图像相干斑抑制的研究现状 分类:成像时进行多视处理、成像后进行滤波 多视处理就是对同一目标生成多幅独立的像,然后进行平均。 这是最早提出的相干斑噪声去除的方法,这种技术以牺牲空间分辨率为代价来获取对斑点的抑制 成像后的滤波技术成为SAR图像相干噪声抑制技术发展的主流 均值滤波、中值滤波、维纳滤波用来滤去相干斑噪声,这种滤波方法能够在一定程度上减小相干斑噪声的方差 合成孔径雷达理论概述 合成孔径雷达是一种高分辨率成像雷达,高分辨率包含两个方面的含义:方位向的高分辨率和距离向高分辨率。它通过采用合成孔径原理提高雷达的方位分辨率,并依靠脉冲压缩技术提高距离分辨率 由于SAR雷达发射信号(距离向信号)和合成孔径信号(方位信号)均具有线性调频性质,SAR成像的实质就是通过匹配滤波器对距离向和方位向具有线性调频信号的信号进行二维脉冲压缩的过程,也就是依靠脉冲压缩技术提高距离分辨率,通过合成孔径原理提高雷达的方位分辨率的过程 SAR成像处理是先利用距离向匹配滤波器,进行距离脉压,实现距离向高分辨率后,再通过方位向德匹配滤波,最终得到原始目标的高分辨图像。 一、几大影响因素对应的基本v-t图像 1.浓度 当其他条件不变时,增大反应物浓度或减小生成物浓度,平衡向正反应方向移动;增大生成物浓度或减小反应物浓度,平衡向逆反应方向移动。 改变浓度对反应速率及平衡的影响曲线: 2.温度。 在其他条件不变的情况下,升高温度,化学平衡向着吸热的方向进行;降低温度,化学平衡向着放热的方向进行。 化学平衡图像专题知识梳理 由曲线可知:当升高温度时,υ正和υ逆均增大,但吸热方向的速率增大的倍数要大于放热方向的速率增大的倍数,即υ吸>υ放,故化学平衡向着吸热的方向移动;当降低温度时,υ正和υ逆 <υ放,故化学平降低,但吸热方向的速率降低的倍数要大于放热方向的速率降低的倍数,即υ 吸 衡向着放热的方向移动。 3.压强 对于有气体参加且方程式左右两边气体物质的量不等的反应来说,在其他条件不变的情况下,增大压强,平衡向着气体物质的量减小的方向移动;减小压强,平衡向着气体物质的量增大的方向移动。 改变压强对反应速率及平衡的影响曲线[举例反应:mA(g)+n(B)p(C),m+n>p] 由曲线可知,当增大压强后,υ正和υ逆均增大,但气体物质的量减小的方向的速率增大的 倍数大于气体物质的量增大的方向的速率增大的倍数(对于上述举例反应来说,即'υ正增大的倍 数大于'υ逆增大的倍数),故化学平衡向着气体物质的量减小的方向移动;当减小压强后,υ正和υ 均减小,但气体物质的量减小的方向的速率减小的倍数大于气体物质的量增大的方向的速率逆 减小的倍数(对于上述举例反应来说,即'υ正减小的倍数大于'υ逆减小的倍数),故化学平衡向着气体物质的量增大的方向移动。 【注意】对于左右两边气体物质的量不等的气体反应来说: *若容器恒温恒容,则向容器中充入与反应无关的气体(如稀有气体等),虽然容器中的总压强增大了,但实际上反应物的浓度没有改变(或者说:与反应有关的气体总压强没有改变),故无论是反应速率还是化学平衡均不改变。 *若容器恒温恒压,则向容器中充入与反应无关的气体(如稀有气体等),为了保持压强一定,容器的体积一定增大,从而降低了反应物的浓度(或者说:相当于减小了与反应有关的气体压强),故靴和她均减小,且化学平衡是向着气体物质的量增大的方向移动。 数字图像处理简答题及答案 简答题 1、数字图像处理的主要研究内容包含很多方面,请列出并简述其中的4种。 2、什么是图像识别与理解? 3、简述数字图像处理的至少3种主要研究内容。 4、简述数字图像处理的至少4种应用。 5、简述图像几何变换与图像变换的区别。 6、图像的数字化包含哪些步骤?简述这些步骤。 7、图像量化时,如果量化级比较小会出现什么现象?为什么? 8、简述二值图像与彩色图像的区别。 9、简述二值图像与灰度图像的区别。 10、简述灰度图像与彩色图像的区别。 11、简述直角坐标系中图像旋转的过程。 12、如何解决直角坐标系中图像旋转过程中产生的图像空穴问题? 13、举例说明使用邻近行插值法进行空穴填充的过程。 14、举例说明使用均值插值法进行空穴填充的过程。 15、均值滤波器对高斯噪声的滤波效果如何?试分析其中的原因。 16、简述均值滤波器对椒盐噪声的滤波原理,并进行效果分析。 17、中值滤波器对椒盐噪声的滤波效果如何?试分析其中的原因。 18、使用中值滤波器对高斯噪声和椒盐噪声的滤波结果相同吗?为什么会出现这种现象? 19、使用均值滤波器对高斯噪声和椒盐噪声的滤波结果相同吗?为什么会出现这种现象? 20、写出腐蚀运算的处理过程。 21、写出膨胀运算的处理过程。 22、为什么YUV表色系适用于彩色电视的颜色表示? 23、简述白平衡方法的主要原理。 24、YUV表色系的优点是什么? 25、请简述快速傅里叶变换的原理。 26、傅里叶变换在图像处理中有着广泛的应用,请简述其在图像的高通滤波中的应用原理。 27、傅里叶变换在图像处理中有着广泛的应用,请简述其在图像的低通滤波中的应用原理。 28、小波变换在图像处理中有着广泛的应用,请简述其在图像的压缩中的应用原理。 29、什么是图像的无损压缩?给出2种无损压缩算法。 2、对于扫描结果:aaaabbbccdeeeeefffffff,若对其进行霍夫曼编码之后的结果是:f=01 e=11 a=10 b=001 c=0001 d=0000。若使用行程编码和霍夫曼编码的混合编码,压缩率是否能够比单纯使用霍夫曼编码有所提高? 31、DCT变换编码的主要思想是什么? 32、简述DCT变换编码的主要过程。 33、什么是一维行程编码?简述其与二维行程编码的主要区别。 34、什么是二维行程编码?简述其与一维行程编码的主要区别。 35、简述一维行程编码和二维行程编码的异同。 36、压缩编码算法很多,为什么还要采用混合压缩编码?请举例说明。 37、对于扫描结果:aaaabbbccdeeeeefffffff,若对其进行霍夫曼编码之后的结果是:f=01 e=11 a=10 b=001 c=0001 d=0000。若使用行程编码和霍夫曼编码的混合编码,压缩率是否能够比单纯使用行程编码有所提高? 38、连续图像和数字图像如何相互转换? 合成孔径雷达第一次作业 姓名:xxx 学号:xxx 一题目: 1.LFM信号分析:(1)仿真LFM信号;(2)观察不同TBP的LFM信号的频谱。(3)观察不同过采样率下的DFT结果,注意频谱混叠情况。 2.脉冲压缩仿真:针对“基带LFM信号”:(1)实现无误差的脉冲压缩;(2)通过频域补0实现时域十倍以上的过采样率,得到光滑的时域波形,通过观察给出指标(IRW,PSLR);(3)阅读资料,按照公式实现3阶(-20dB),6阶(-40 dB)泰勒加权,观察加窗效果,分析指标(IRW,PSLR),并对比MATLAB TAYLORWIN 函数的一致性;(4)在3阶泰勒加权下实现15.30.45.60.90.135度QPE下的脉冲压缩,显示输出波形,观察记录QPE的影响。 3.一维距离向仿真:(1)输入参数:目标参数:RCS=1,分别位于10km,11km,11km+3m,11km+50m处。LFM信号参数:中心频率1.0GHz,脉冲宽度30us,带宽30MHz。 (2)输出:设计采样波门,仿真回波,完成脉冲压缩,检测各峰值位置,判断每个目标是否得以分辨,分析各出现在相应位置及幅度的原因。 二题目分析与解答: 1.问题分析:由基础知识知,决定LFM信号的主要参数有中心频率fc(此处仿真取fc=0),带宽B,脉冲宽度Tp, 调频斜率K,其中K=B/Tp。对LFM信号进行傅里叶变换时,不同的时宽带宽积(TBP)会对频谱有不同的影响。 主要程序段(源程序见附件): %参数设置 Tp=5e-6; B=10e6; K=B/Tp;Fs=2*B; Ts=1/Fs; N=Tp/Ts; TBP=Tp*B %波形产生 t=linspace(-Tp/2,Tp/2,N); St=exp(j*pi*K*t.^2); Phase=pi*K*t.^2; Fre=2*pi*K*t; f=linspace(-Fs/2,Fs/2,N); figure(2) plot(f*1e-6,fftshift(abs(fft(St))),'k'); xlabel('Frequency/MHz'); ylabel('Magnitude'); title('Frequence Response'); legend('TBP=50') fft_St=fftshift(abs(fft(St))); 酸碱中和反应的那些事 1.【2019新课标I 】NaOH 溶液滴定邻苯二甲酸氢钾(邻苯二甲酸氢钾H 2A 的K a1=1.1×10?3 , K a2=3.9×10?6)溶液,混合溶液的相对导电能力变 化曲线如图所示,其中b 点为反应终点。下列叙述错误的是( ) A. 混合溶液的导电能力与离子浓度和种类有关 B. Na + 与A 2 ?的导电能力之和大于HA ?的 C. b 点的混合溶液pH=7 D. c 点的混合溶液中,c (Na + )>c (K + )>c (OH ?) 2.【2020新课标I 】以酚酞为指示剂,用0.1000 mol·L ?1 的NaOH 溶液滴定20.00 mL 未知 浓度的二元酸H 2A 溶液。溶液中,pH 、分布系数δ随滴加NaOH 溶液体积V NaOH 的变化关系如图所示。[比如A 2 ?的分布系数: 2-2- -2-2c(A )δ(A )=c(H A)+c(HA )+c(A ) ] 下列叙述正确的是( ) A. 曲线①代表2δ(H A),曲线②代表-δ(HA ) B. H 2A 溶液的浓度为0.2000 mol·L ?1 C. HA ?的电离常数K a =1.0×10?2 D. 滴定终点时,溶液中+2--(Na )<2(A )+(HA )c c c 3.【2020新课标I 】常温下将NaOH 溶液添加到己二酸(H 2X )溶液中,混合溶液的pH 与离 子浓度变化的关系如图所示。下列叙述错误的是( ) A .K SP (H 2X )的数量级为10-6 B .曲线N 表示pH 与2(HX ) lg (H X)c c -的变化关系 C .NaHX 溶液中(H )(OH )c c + - > D .当混合溶液呈中性时, 2(Na )(HX )(X )(OH )(H )c c c c c +---+>>>= MATLAB 数字图像处理技术 4 MATLAB 图像增强 4.1 原理、方法及体系结构 三个阶段:图像预处理、特征抽取阶段、识别分析阶段。 目的:改善图像的视觉效果,提高图像成分的清晰度;是图像变得有利于计算机处理。 方法:空间域增强方法、频域增强方法。 体系: 图像增强:空间域、频率域、彩色增强 空间域:像素点处理(图像灰度变换、直方图修正(中值滤波、均值滤波))、领域处理(图像平滑滤波、图像锐化滤波) 频率域:低通滤波、高通滤波、同态滤波 彩色处理:真彩色处理、伪彩色处理(灰度分层法、灰度变换法、频域伪彩色) 4.2 对比度增强 线性变换:(,)[(,)]N n g x y f x y m n M m -= -+-。其中功能是把函数的灰度值(,)f x y 从 范围[m,M]变为[n,N]。 非线性变换:分为对数变换和Gamma 变换。前者表达式为(,)log[(,)1]g x y c f x y =+, 其中c 为常数。后者表达式为r f cr =,r 为CCD 图像传感器或胶片等的入射光的强度,为 常数,灰度与光强成正比,则有1 ()r f g kr k c ==,k 为常数通常为1,1/r 取0.4~0.8。 我们可以用一个函数imadjust 函数来实现: J=imadjust(I); J=imadjust(I,[low_in;high_in],[low_out;high_out]); J=imadjust(I,[low_in;high_in],[low_out;high_out],gamma)。 其中灰度范围用归一化灰度值,范围[0,1]。整个图像的[low_in;high_in]可以用函数stretch 函数来获得。 MATLAB image toolbox5.4还提供一个手动调节的控制面板,调用函数imconstrast 。 4.3 空域变换增强 分为基于像素点和基于模板的两类方法。 像素选择:pixval 和impixel 。用法如下: Pixval(‘on/off ’);pixval ;pixval(fig,option); [C,R,P]=impixel(X,MAP)。 说明:MAP 仅仅当是索引图的时候采用此参数。C 为像素的颜色,R,P 为像素的坐标。Pixval 可以得到更多的像素信息,impixel 可以返回指定像素的颜色值。 强度描述图:improfile ,用以描述图像一条线段或多条线段的强度值。格式: 合成孔径雷达(SAR)的点目标仿真(附件带代码程序) 合成孔径雷达(SAR)的点目标仿真 一. SAR原理简介 合成孔径雷达(Synthetic Aperture Radar ,简称SAR)是一种高分辨率成像雷达技术。它利用脉冲压缩技术获得高的距离向分辨率,利用合成孔径原理获得高的方位向分辨率,从而获得大面积高分辨率雷达图像。SAR回波信号经距离向脉冲压缩后,雷达的距离分辨率由雷达发射信号带宽决定:,式中表示雷达的距离分辨率,表示雷达发射信号带宽,表示光速。同样,SAR回波信号经方位向合成孔径后,雷达的方位分辨率由雷达方位向的多谱勒带宽决定:,式中表示雷达的方位分辨率,表示雷达方位向多谱勒带宽,表示方位向SAR平台速度。 二. SAR的成像模式和空间几何关系 根据SAR波束照射的方式,SAR的典型成像模式有Stripmap(条带式),Spotlight(聚束式)和Scan(扫描模式),如图2.1。条带式成像是最早研究的成像模式,也是低分辨率成像最简单最有效的方式;聚束式成像是在一次飞行中,通过不同的视角对同一区域成像,因而能获得较高的分辨率;扫描模式成像较少使用,它的信号处理最复杂。 图2.1:SAR典型的成像模式 这里分析SAR点目标回波时,只讨论正侧式Stripmap SAR,正侧式表示SAR波束中心和SAR平台运动方向垂直,如图2.2,选取直角坐标系XYZ为参考坐标系,XOY平面为地平面;SAR平台距地平面高h,沿X轴正向以速度V匀速飞行;P点为SAR平台的位置矢量,设其坐标为(x,y,z);T点为目标的位置矢量,设其坐标为;由几何关系,目标与SAR平台的斜距为: (2.1) 由图可知:;令,其中为平台速度,s为慢时间变量(slow time),假设,其中表示SAR平台的x 坐标为的时刻;再令,表示目标与SAR的垂直斜距,重写2.1式为: (2.2) 就表示任意时刻时,目标与雷达的斜距。一般情况下,,于是2.2式可近似写为: (2.3) 可见,斜距是的函数,不同的目标,也不一样,但当目标距SAR较远时,在观测带内,可近似认为不变,即。 图像处理及制版原理 实验一图像扫描仪和数字照相机的操作和设置 一、实验名称: 图像扫描仪和数字照相机的操作和设置 二、实验目的和要求: 本实验适用于印刷工程、包装工程专业的《图像处理及制版原理》、《图文复制技术》及其他专业的类似课程。 在课堂教学的基础上,通过本实验的教学活动,学生应进一步认识扫描仪和数字照相机的基本构成和工作原理,熟悉扫描仪和数字照相机的基本操作技能,掌握扫描软件的设置方法,认识不同的图像设置对所获得图像的作用和影响。 根据教学安排和需要,可以将图像和数字照相机的实验内容分开实施,或有所取舍。 三、实验基本内容: 1.扫描仪的操作和扫描软件的设置; 2.数字照相机的操作,照相机设置。 四、实验设备: 1.桌面型平面扫描仪及扫描软件: Microtek公司ScanMaker 6700、ScanMaker I700等; 扫描软件:ScanWizard。 Microtek SanMaker 6700 Microtek I 700 2.专业平面扫描仪: Screen公司彩仙(Cézanne)及其扫描软件ColorGenius。 Screen Cézanne 3.紧凑型数字照相机: Panasonic公司的LUMIX FX 8、Canon公司的IXUS 400等。 Panasonic Lumix FX 8 Canon Ixus 400 五、实验原理: (一) 扫描仪和数字照相机的工作原理: 1.平面型扫描仪: 图像原稿放置在扫描平台上,扫描仪的线状光源逐行照射原稿,扫描仪的光学/电子单元从原稿获取图像信息。从原稿上反射或透射的图像光线经光学系统成像在光电转换器件(CCD)上。由于光电转换器件上具备红/绿/蓝三种滤色片,从原稿来的光线先被分解成红/绿/蓝光,再经光电转换器件转换成红/绿/蓝模拟电信号。随后,模/数转换器将模拟电信号转换成红/绿/蓝模拟电信号。经过扫描软件和相关硬件的图像处理,得到数字图像数据。数字图像数据经接口传送到计算机内,最终存储成数字图像文件。 摘要 本文对图形图像处理系统的发展现状和所采用的主要技术进行了详细分析,确定了相应的结构和主要功能,以及实际开发中所采取的技术。系统在Windows XP平台下实现,本课题是采用Visual C++作为编程工具,采用面向对象的程序设计技术实现一个图形绘制和图像处理的应用软件。主要工作分为三类,包括基本图形绘制与编辑、简单的图像处理、图像格式的转换。图形方面主要是设计图形基类,以及继承图形基类的具体图形类。通过对独立功能的封装,可以为今后需要的图形图像的应用奠定基础。系统的优点有:充分体现了面向对象的设计思想,充分运用了C++的特性,比如封装、多态、继承。程序结构清晰,可读性好,程序中做了充分的注释。图形绘制部分避免了传统的switch case的繁琐结构。容易扩充和移植。 最后,对系统进行测试表明,系统功能达到了预期的要求,界面友好,操作简便,运行也较稳定,是一个完成基本功能的图形图像系统。 总体上,本文介绍了系统开发设计的全过程和设计过程中部分代码,也对系统测试的过程进行简单描述,同时对系统中采用的关键技术也作了一些必要的说明,对图像变换的基本原理,图像处理的基本原理和各种图像格式做了详细的阐述。 关键词:图形;图像;多态;继承 Abstract This article has carried on the detailed analysis about graph image processing system development and using of the key technology,identify the corresponding structure and central function, as well as the system adopts technology in the actual development. The system realizes under the Windows XP platform, the topic use Visual C++ as a programming tool, use object-oriented programming techniques to achieve a graphic and image processing software. Major work is divided into three categories, basic drawing and editing graphics, simple image processing, and image format conversion. The graph aspect is designs the graph base class , as well as inherits the graph bas e class’s specific graph class. Through independent function's encapsulation, for the future’s needs of the graphic images lays the foundation. The system merit has: the object-oriented design’s thought application of the c++ properties, for example encapsulation, pol ymorphism, and inheritance. Program’s structure is clear, good readability, codes has the full annotation in the program. The graph plan’s part has avoided complicated structure of the traditional switch case. Easy expansion and transplantation. Finally, system’s testing shows, s ystem’s functions achieve the expected demand, friendly interface, and the operation is simple, also a much stable operation, it has basic functions of the graphic image system. As a whole, this paper describes the system design process and part of the process of designing code, also carries on the simple description to the system test process, meanwhile it made some necessary explanations about key technology in the system, it made the detailed description to image transform of the basic合成孔径雷达概述(SAR)
雷达成像技术(保铮word版)第四章 合成孔径雷达
2018年高考化学真题与模拟类编:专题14-化学反应原理综合(含答案)
真实和合成孔径雷达
Real Aperture Radar (RAR) flight direction
azimuth Synthetic Aperture Radar (SAR) flight direction
azimuth
1
2
δr =
1 c cτ = 2 2B
Spatial Resolution (2)
For Real Aperture Radar (Side-looking Radar)
razimuth ?
λR
l cτ 2 sin θ
rground ? range =
For Synthetic Aperture Radar (SAR)
razimuth ?
l 2 c 2 B sin θ
rground ?range =
3
τc
2 cos γ
=
ground Range resolution
pulse length × speed of light 2 cos ( depression angle )
Range Resolution (2)
4数字图像处理中的边缘检测技术
图像处理技术原理及其在生活中的应用探讨
图像拼接原理及方法
合成孔径雷达成像自聚焦算法的比较
合成孔径雷达
高中化学09化学平衡图像专题
数字图像处理简答题及答案..
合成孔径雷达成像
高二化学--化学反应原理--酸碱中和反应图像及特殊情况的处理
MATLAB数字图像处理技术
合成孔径雷达(SAR)的点目标仿真(附件带代码程序)
图像处理及制版原理.
图像识别技术和图像处理技术