神经网络模型应用实例

BP 神经网络模型
近年来全球性的神经网络研究热潮的再度兴起,不仅仅是因为神经科学本身取得了巨大的进展.更主要的原因在于发展新型计算机和人工智能新途径的迫切需要.迄今为止在需要人工智能解决的许多问题中,人脑远比计算机聪明的多,要开创具有智能的新一代计算机,就必须了解人脑,研究人脑神经网络系统信息处理的机制.另一方面,基于神经科学研究成果基础上发展出来的人工神经网络模型,反映了人脑功能的若干基本特性,开拓了神经网络用于计算机的新途径.它对传统的计算机结构和人工智能是一个有力的挑战,引起了各方面专家的极大关注.
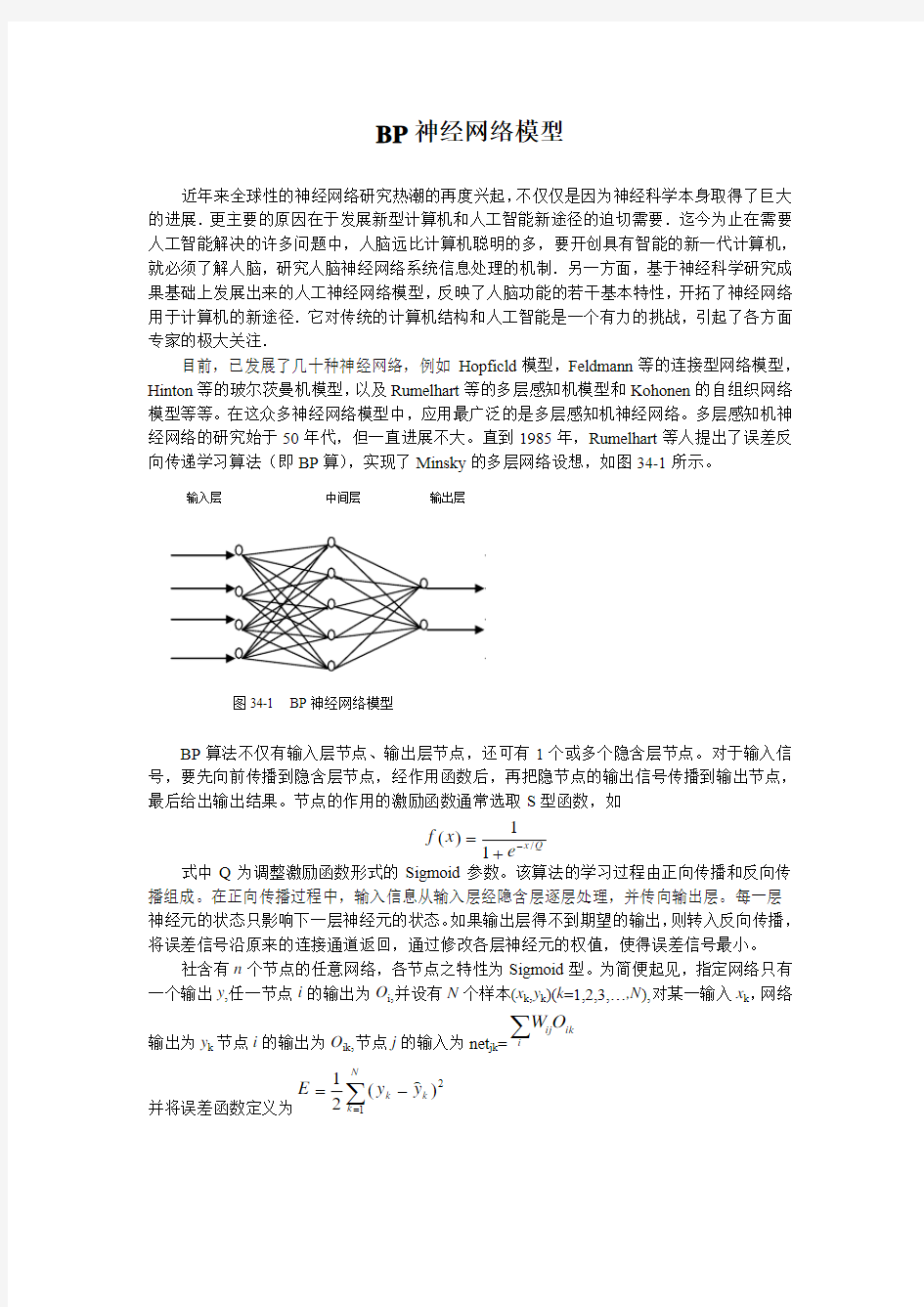
目前,已发展了几十种神经网络,例如Hopficld 模型,Feldmann 等的连接型网络模型,Hinton 等的玻尔茨曼机模型,以及Rumelhart 等的多层感知机模型和Kohonen 的自组织网络模型等等。在这众多神经网络模型中,应用最广泛的是多层感知机神经网络。多层感知机神经网络的研究始于50年代,但一直进展不大。直到1985年,Rumelhart 等人提出了误差反向传递学习算法(即BP 算),实现了Minsky 的多层网络设想,如图34-1所示。
BP 算法不仅有输入层节点、输出层节点,还可有1个或多个隐含层节点。对于输入信号,要先向前传播到隐含层节点,经作用函数后,再把隐节点的输出信号传播到输出节点,最后给出输出结果。节点的作用的激励函数通常选取S 型函数,如
Q x e x f /11
)(-+=
式中Q 为调整激励函数形式的Sigmoid 参数。该算法的学习过程由正向传播和反向传播组成。在正向传播过程中,输入信息从输入层经隐含层逐层处理,并传向输出层。每一层神经元的状态只影响下一层神经元的状态。如果输出层得不到期望的输出,则转入反向传播,将误差信号沿原来的连接通道返回,通过修改各层神经元的权值,使得误差信号最小。
社含有n 个节点的任意网络,各节点之特性为Sigmoid 型。为简便起见,指定网络只有一个输出y ,任一节点i 的输出为O i ,并设有N 个样本(x k ,y k )(k =1,2,3,…,N ),对某一输入x k ,网络输出为y k 节点i 的输出为O ik ,节点j 的输入为net jk =
∑i
ik ij O
W
并将误差函数定义为∑=-=N k k k y y E 12
)(21
其中k y 为网络实际输出,定义E k =(y k -?k )2, jk k
jk E net ??=
δ,且O jk =f (net jk
),于是
ik
jk
k ij jk jk k ij k O E W E W E net net net ??=????=??=δjk O ik
当j 为输出节点时,O jk =?k
)net ()(net jk k k jk
k k k jk
f y y y y E '--=????=
δ
(34.1)
若j 不是输出节点,则有
∑∑∑∑∑∑=??=????=????=??'??=????=??=
m i m mj mk mj mk k
m i
ik mi jk mk k m jk mk
mk
k jk k jk jk
k
jk jk jk k jk k jk W W E O W O E O E O E f O E O O E E δδnet net net net )net (net net 因此
?????=??'=∑ik mk ij
k
m mj
mk jk jk O W E W f δδδ)net ( (34.2)
如果有M 层,而第M 层仅含输出节点,第一层为输入节点,则BP 算法为: 第一步,选取初始权值W 。
第二步,重复下述过程直至收敛:
a. a. 对于k =1到N
a ). 计算O ik , net jk 和?k 的值(正向过程);
b ). 对各层从M 到2反向计算(反向过程);
b. b. 对同一节点j ∈M ,由式(34.1)和(34.2)计算δjk ;
第三步,修正权值,W ij =W ij -μij W E ??, μ>0, 其中∑??=??N
k ij k
ij
W E W E
。 从上述BP 算法可以看出,BP 模型把一组样本的I/O 问题变为一个非线性优化问题,
它使用的是优化中最普通的梯度下降法。如果把神经网络的看成输入到输出的映射,则这个映射是一个高度非线性映射。
设计一个神经网络专家系统重点在于模型的构成和学习算法的选择。一般来说,结构是根据所研究领域及要解决的问题确定的。通过对所研究问题的大量历史资料数据的分析及目前的神经网络理论发展水平,建立合适的模型,并针对所选的模型采用相应的学习算法,在网络学习过程中,不断地调整网络参数,直到输出结果满足要求。
第2节 DPS 数据处理系统操作步骤
在DPS 数据处理系统中,数据的输入格式是一行为一个样本,一列为一个变量,输入
节点(变量)放在数据块左边,输出节点(因变量)放在数据块右边,输完一个样本后再输下一个样本。对于待识别(预测)的样本,不需要输入输出变量(因变量)。
数据输入完毕后,定义数据块。如有待识别(预测)的样本,可在按下Ctrl键时再按下并拖动鼠标,将待预测的样本定义成第二个数据块。
在进行神经网络学习之前,系统出现如图34-2所示界面,这时需要你提供若干参数,各个参数取值的基本原则是:
图34-2 神经网络参数设置对话框
网络参数确定原则:
①、网络节点网络输入层神经元节点数就是系统的特征因子(自变量)个数,输出层神经元节点数就是系统目标个数。隐层节点选按经验选取,一般设为输入层节点数的75%。如果输入层有7个节点,输出层1个节点,那么隐含层可暂设为5个节点,即构成一个7-5-1 BP神经网络模型。在系统训练时,实际还要对不同的隐层节点数4、5、6个分别进行比较,最后确定出最合理的网络结构。
②、初始权值的确定初始权值是不应完全相等的一组值。已经证明,即便确定存在一组互不相等的使系统误差更小的权值,如果所设W ji的的初始值彼此相等,它们将在学习过程中始终保持相等。故而,在程序中,我们设计了一个随机发生器程序,产生一组一
0.5~+0.5的随机数,作为网络的初始权值。
③、最小训练速率在经典的BP算法中,训练速率是由经验确定,训练速率越大,权重变化越大,收敛越快;但训练速率过大,会引起系统的振荡,因此,训练速率在不导致振荡前提下,越大越好。因此,在DPS中,训练速率会自动调整,并尽可能取大一些的值,但用户可规定一个最小训练速率。该值一般取0.9。
④、动态参数动态系数的选择也是经验性的,一般取0.6 ~0.8。
⑤、允许误差一般取0.001~0.00001,当2次迭代结果的误差小于该值时,系统结束迭代计算,给出结果。
⑥、迭代次数一般取1000次。由于神经网络计算并不能保证在各种参数配置下迭代结果收敛,当迭代结果不收敛时,允许最大的迭代次数。
⑦、Sigmoid参数该参数调整神经元激励函数形式,一般取0.9~1.0之间。
⑧、数据转换。在DPS系统中,允许对输入层各个节点的数据进行转换,提供转换的方法有取对数、平方根转换和数据标准化转换。
第3节应用实例
原始数据整理:本例令影响棉铃虫发生程度的因素指标集序列由麦田1代幼虫量、6月降水天数、5月积温、6月积温、5月相对湿度、5月降水天数和6月相对湿度等7个生态和生物因子构成,2代发生程度按照全国植保站颁发的标准分级,并规定发生程度重、偏重、中、偏轻和轻分别赋值为0.9、0.7、0.5、0.3和0.1。在建立BP神经网络模型时,取1982~1991年的数据作为学习、训练样本,1992和1993年为试报样本。在数据分析前将数据定义成数据块(图34-3).
图34-3 BP神经网络数据编辑定义示意图
进入BP神经网络训练时, 系统会显示如图34-3所示界面。这时我们可按网络的结构确定网络的参数,这里输入层节点数为7,隐含层1层,最小训练速率取0.1,动态参数0.7,Sigmoid参数为0.9, 允许误差0.00001,最大迭代次数1000。并对输入节点的数值进行标准化转换。
点击“确定”按钮后,设置隐层的神经元个数(这里取5),运行1000次后,样本误差等
学习样本的拟合值和实际观察值, 以及根据BP神经网络对1992、1993年2代棉铃虫发生程度进行预测的结果与实际值的比较列于表34-1。结果表明,应用BP神经网络进行二代棉铃虫发生程度预测,不仅历史资料的拟合率高,而且2年的试报结果与实际完全符合。
表34-1 神经元网络训练结果及试报结果
年份1982 1983 1984 1985 1986 1987 训练输出值0.6997 0.8952 0.5004 0.3000 0.8900 0.1014 实际值0.7000 0.9000 0.5000 0.3000 0.9000 0.1000
年份1988 1989 1990 1991 1992 1993
训练输出值0.8862 0.5011 0.7026 0.8733 0.8955*
0.8985*
实际值0.9000 0.5000 0.7000 0.9000 0.9000 0.9000
*1992~1993年为试报结果
基于BP神经网络的预测模型
基于BP神经网络的国际黄金价格预测模型 公文易文秘资源网顾孟钧张志和陈友2009-1-2 13:35:26我要投稿添加到百度搜藏 [摘要] 为了寻找国际黄金价格与道琼斯工业指数、美国消费者指数,国际黄金储备等因素之间的内在关系,本文对1972年~2006年间的各项数据首先进行归一化处理,利用MATLAB神经网络工具箱进行模拟训练,建立了基于BP神经网络的国际黄金价格预测模型 [摘要] 为了寻找国际黄金价格与道琼斯工业指数、美国消费者指数,国际黄金储备等因素之间的内在关系,本文对1972年~2006年间的各项数据首先进行归一化处理,利用MATLAB神经网络工具箱进行模拟训练,建立了基于BP神经网络的国际黄金价格预测模型。 [关键词] MATLAB BP神经网络预测模型数据归一化 一、引言 自20世纪70年代初以来的30多年里,世界黄金价格出现了令人瞠目的剧烈变动。20 世纪70年代初,每盎司黄金价格仅为30多美元。80年代初,黄金暴涨到每盎司近700美元。本世纪初,黄金价格处于每盎司270美元左右,此后逐年攀升,到2006年5月12日达到了26年高点,每盎司730美元,此后又暴跌,仅一个月时间内就下跌了约160美元,跌幅高达21.9%。最近两年,黄金价格一度冲高到每盎司900多美元。黄金价格起伏如此之大,本文根据国际黄金价格的影响因素,通过BP神经网络预测模型来预测长期黄金价格。 二、影响因素 刘曙光和胡再勇证实将观察期延长为1972年~2006年时,则影响黄金价格的主要因素扩展至包含道琼斯指数、美国消费者价格指数、美元名义有效汇率、美国联邦基金利率和世界黄金储备5个因素。本文利用此观点,根据1972年~2006年各因素的值来建立神经网络预测模型。 三、模型构建
数学建模神经网络预测模型及程序
年份 (年) 1(1988) 2(1989) 3(1990) 4(1991) 5(1992) 6(1993) 7(1994) 8(1995) 实际值 (ERI) 年份 (年) 9(1996) 10(1997) 11(1998) 12(1999) 13(2000) 14(2001) 15(2002) 16(2003) 实际值 (ERI) BP 神经网络的训练过程为: 先用1988 年到2002 年的指标历史数据作为网络的输入,用1989 年到2003 年的指标历史数据作为网络的输出,组成训练集对网络进行训练,使之误差达到满意的程度,用这样训练好的网络进行预测. 采用滚动预测方法进行预测:滚动预测方法是通过一组历史数据预测未来某一时刻的值,然后把这一预测数据再视为历史数据继续预测下去,依次循环进行,逐步预测未来一段时期的值. 用1989 年到2003 年数据作为网络的输入,2004 年的预测值作为网络的输出. 接着用1990 年到2004 年的数据作为网络的输入,2005 年的预测值作为网络的输出.依次类推,这样就得到2010 年的预测值。 目前在BP 网络的应用中,多采用三层结构. 根据人工神经网络定理可知,只要用三层的BP 网络就可实现任意函数的逼近. 所以训练结果采用三层BP模型进行模拟预测. 模型训练误差为,隐层单元数选取8个,学习速率为,动态参数,Sigmoid参数,最大迭代次数3000.运行3000次后,样本拟合误差等于。 P=[。。。];输入T=[。。。];输出 % 创建一个新的前向神经网络 net_1=newff(minmax(P),[10,1],{'tansig','purelin'},'traingdm') % 当前输入层权值和阈值 inputWeights={1,1} inputbias={1} % 当前网络层权值和阈值 layerWeights={2,1} layerbias={2} % 设置训练参数 = 50; = ; = ; = 10000; = 1e-3;
基于神经网络的预测控制模型仿真
基于神经网络的预测控制模型仿真 摘要:本文利用一种权值可以在线调整的动态BP神经网络对模型预测误差进行拟合并与预测模型一起构成动态组合预测器,在此基础上形成对模型误差具有动态补偿能力的预测控制算法。该算法显著提高了预测精度,增强了预测控制算法的鲁棒性。 关键词:预测控制神经网络动态矩阵误差补偿 1.引言 动态矩阵控制(DMC)是一种适用于渐近稳定的线性或弱非线性对象的预测控制算法,目前已广泛应用于工业过程控制。它基于对象阶跃响应系数建立预测模型,因此建模简单,同时采用多步滚动优化与反馈校正相结合,能直接处理大时滞对象,并具有良好的跟踪性能和较强的鲁棒性。 但是,DMC算法在实际控制中存在一系列问题,模型失配是其中普遍存在的一个问题,并会不同程度地影响系统性能。DMC在实际控制中产生模型失配的原因主要有2个,一是诸如建模误差、环境干扰等因素,它会在实际控制的全程范围内引起DMC的模型失配;二是实际系统的非线性特性,这一特性使得被控对象的模型发生变化,此时若用一组固定的阶跃响应数据设计控制器进行全程范围的控制,必然会使实际控制在对象的非建模区段内出现模型失配。针对DMC模型失配问题,已有学者进行了大量的研究,并取得了丰富的研究成果,其中有基于DMC控制参数在线辨识的智能控制算法,基于模型在线辨识的自校正控制算法以及用神经元网络进行模型辨识、在辨识的基础上再进行动态矩阵控制等。这些算法尽管进行在线辨识修正对象模型参数,仍对对象降阶建模误差(结构性建模误差)的鲁棒性不好,并对随机噪声干扰较敏感。针对以上问题,出现了基于误差校正的动态矩阵控制算法。这些文献用基于时间序列预测的数学模型误差代替原模型误差,得到对未来误差的预测。有人还将这种误差预测方法引入动态矩阵控制,并应用于实际。这种方法虽然使系统表现出良好的稳定性,但建立精确的误差数学模型还存在一定的困难。 本文利用神经网络通过训练学习能逼近任意连续有界函数的特点,建立了一种采用BP 神经网络进行预测误差补偿的DMC预测控制模型。其中神经网络预测误差描述了在预测模型中未能包含的一切不确定性信息,可以归结为用BP神经网络基于一系列过去的误差信息预测未来的误差,它作为模型预测的重要补充,不仅降低建立数学模型的负担,而且还可以弥补在对象模型中已简化或无法加以考虑的一切其他因素。 本文通过进行仿真,验证了基于神经网络误差补偿的预测控制算法的有效性及优越性,
神经网络模型预测控制器
神经网络模型预测控制器 摘要:本文将神经网络控制器应用于受限非线性系统的优化模型预测控制中,控制规则用一个神经网络函数逼近器来表示,该网络是通过最小化一个与控制相关的代价函数来训练的。本文提出的方法可以用于构造任意结构的控制器,如减速优化控制器和分散控制器。 关键字:模型预测控制、神经网络、非线性控制 1.介绍 由于非线性控制问题的复杂性,通常用逼近方法来获得近似解。在本文中,提出了一种广泛应用的方法即模型预测控制(MPC),这可用于解决在线优化问题,另一种方法是函数逼近器,如人工神经网络,这可用于离线的优化控制规则。 在模型预测控制中,控制信号取决于在每个采样时刻时的想要在线最小化的代价函数,它已经广泛地应用于受限的多变量系统和非线性过程等工业控制中[3,11,22]。MPC方法一个潜在的弱点是优化问题必须能严格地按要求推算,尤其是在非线性系统中。模型预测控制已经广泛地应用于线性MPC问题中[5],但为了减小在线计算时的计算量,该部分的计算为离线。一个非常强大的函数逼近器为神经网络,它能很好地用于表示非线性模型或控制器,如文献[4,13,14]。基于模型跟踪控制的方法已经普遍地应用在神经网络控制,这种方法的一个局限性是它不适合于不稳定地逆系统,基此本文研究了基于优化控制技术的方法。 许多基于神经网络的方法已经提出了应用在优化控制问题方面,该优化控制的目标是最小化一个与控制相关的代价函数。一个方法是用一个神经网络来逼近与优化控制问题相关联的动态程式方程的解[6]。一个更直接地方法是模仿MPC方法,用通过最小化预测代价函数来训练神经网络控制器。为了达到精确的MPC技术,用神经网络来逼近模型预测控制策略,且通过离线计算[1,7.9,19]。用一个交替且更直接的方法即直接最小化代价函数训练网络控制器代替通过训练一个神经网络来逼近一个优化模型预测控制策略。这种方法目前已有许多版本,Parisini[20]和Zoppoli[24]等人研究了随机优化控制问题,其中控制器作为神经网络逼近器的输入输出的一个函数。Seong和Widrow[23]研究了一个初始状态为随机分配的优化控制问题,控制器为反馈状态,用一个神经网络来表示。在以上的研究中,应用了一个随机逼近器算法来训练网络。Al-dajani[2]和Nayeri等人[15]提出了一种相似的方法,即用最速下降法来训练神经网络控制器。 在许多应用中,设计一个控制器都涉及到一个特殊的结构。对于复杂的系统如减速控制器或分散控制系统,都需要许多输入与输出。在模型预测控制中,模型是用于预测系统未来的运动轨迹,优化控制信号是系统模型的系统的函数。因此,模型预测控制不能用于定结构控制问题。不同的是,基于神经网络函数逼近器的控制器可以应用于优化定结构控制问题。 在本文中,主要研究的是应用于非线性优化控制问题的结构受限的MPC类型[20,2,24,23,15]。控制规则用神经网络逼近器表示,最小化一个与控制相关的代价函数来离线训练神经网络。通过将神经网络控制的输入适当特殊化来完成优化低阶控制器的设计,分散和其它定结构神经网络控制器是通过对网络结构加入合适的限制构成的。通过一个数据例子来评价神经网络控制器的性能并与优化模型预测控制器进行比较。 2.问题表述 考虑一个离散非线性控制系统: 其中为控制器的输出,为输入,为状态矢量。控制
BP神经网络预测模型及应用
B P神经网络预测模型及 应用 IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】
B P神经网络预测模型及应用 摘要采用BP神经网络的原理,建立神经网络的预测模型,并利用建立的人工神经网络训练并预测车辆的销售量,最后得出合理的评价和预测结果。 【关键词】神经网络模型预测应用 1 BP神经网络预测模型 BP神经网络基本理论 人工神经网络是基于模仿生物大脑的结构和功能而构成的一种信息处理系统。该网络由许多神经元组成,每个神经元可以有多个输入,但只有一个输出,各神经元之间不同的连接方式构成了不同的神经网络模型,BP网为其中之一,它又被称为多层前馈神经网络。 BP神经网络预测模型 (1)初始化,给各连接权值(wij,vi)及阐值(θi)赋予随机值,确定网络结构,即输入单元、中间层单元以及输出层单元的个数;通过计算机仿真确定各系数。 在进行BP网络设计前,一般应从网络的层数、每层中的神经元个数、初始值以及学习方法等方面进行考虑,BP网络由输入层、隐含层和输出层组成。隐含层神经元个数由以下经验公式计算: (1)
式中:s为隐层节点数,m为输入层节点数,n为输出层节点数,h为正整数,一般取3―7. BP网络采用了有一定阈值特性的、连续可微的sigmoid函数作为神经元的激发函数。采用的s 型函数为: (2) 式中:s为隐层节点数,m为输入层节点数,n为输出层节点数,h为正整数,一般取3―7.计算值需经四舍五入取整。 (2)当网络的结构和训练数据确定后,误差函数主要受激励函数的影响,尽管从理论分析中得到比的收敛速度快,但是也存在着不足之处。当网络收敛到一定程度或者是已经收敛而条件又有变化的时候,过于灵敏的反映会使得系统产生震荡,难于收敛。因此,对激励函数进行进一步改进,当权值wij (k)的修正值Δwij(k) Δwij(k+1)<0时,,其中a为大于零小于1的常数。这样做降低了系统进入最小点时的灵敏度,减少震荡。 2 应用 车辆销售量神经网络预测模型 本文以某汽车制造企业同比价格差、广告费用、服务水平、车辆销售量作为学习训练样本数据。如表1。 表1 产品的广告费、服务水平、价格差、销售量 月份广告费 (百万元)服务水平价格差
Hopfield神经网络综述
题目:Hopfield神经网络综述 一、概述: 1.什么是人工神经网络(Artificial Neural Network,ANN) 人工神经网络是一个并行和分布式的信息处理网络结构,该网络结构一般由许多个神经元组成,每个神经元有一个单一的输出,它可以连接到很多其他的神经元,其输入有多个连接通路,每个连接通路对应一个连接权系数。 人工神经网络系统是以工程技术手段来模拟人脑神经元(包括细胞体,树突,轴突)网络的结构与特征的系统。利用人工神经元可以构成各种不同拓扑结构的神经网络,它是生物神经网络的一种模拟和近似。主要从两个方面进行模拟:一是结构和实现机理;二是从功能上加以模拟。 根据神经网络的主要连接型式而言,目前已有数十种不同的神经网络模型,其中前馈型网络和反馈型网络是两种典型的结构模型。 1)反馈神经网络(Recurrent Network) 反馈神经网络,又称自联想记忆网络,其目的是为了设计一个网络,储存一组平衡点,使得当给网络一组初始值时,网络通过自行运行而最终收敛到这个设计的平衡点上。反馈神经网络是一种将输出经过一步时移再接入到输入层的神经网络系统。 反馈网络能够表现出非线性动力学系统的动态特性。它所具有的主要特性为以下两点:(1).网络系统具有若干个稳定状态。当网络从某一初始状态开始运动,网络系统总可以收敛到某一个稳定的平衡状态; (2).系统稳定的平衡状态可以通过设计网络的权值而被存储到网络中。 反馈网络是一种动态网络,它需要工作一段时间才能达到稳定。该网络主要用于联想记忆和优化计算。在这种网络中,每个神经元同时将自身的输出信号作为输入信号反馈给其他神经元,它需要工作一段时间才能达到稳定。 2.Hopfiel d神经网络 Hopfield网络是神经网络发展历史上的一个重要的里程碑。由美国加州理工学院物理学家J.J.Hopfield 教授于1982年提出,是一种单层反馈神经网络。Hopfiel d神经网络是反馈网络中最简单且应用广泛的模型,它具有联想记忆的功能。 Hopfield神经网络模型是一种循环神经网络,从输出到输入有反馈连接。在输入的激励下,会产生不断的状态变化。 反馈网络有稳定的,也有不稳定的,如何判别其稳定性也是需要确定的。对于一个Hopfield 网络来说,关键是在于确定它在稳定条件下的权系数。 下图中,第0层是输入,不是神经元;第二层是神经元。
基于Bp神经网络的股票预测
基于神经网络的股票预测 【摘要】: 股票分析和预测是一个复杂的研究领域,本论文将股票技术分析理论与人工神经网络相结合,针对股票市场这一非线性系统,运用BP神经网络,研究基于历史数据分析的股票预测模型,同时,对单只股票短期收盘价格的预测进行深入的理论分析和实证研究。本文探讨了BP神经网络的模型与结构、BP算法的学习规则、权值和阈值等,构建了基于BP神经网络的股票短期预测模型,研究了神经网络的模式、泛化能力等问题。并且,利用搭建起的BP神经网络预测模型,采用多输入单输出、单隐含层的系统,用前五天的价格来预测第六天的价格。对于网络的训练,选用学习率可变的动量BP算法,同时,对网络结构进行了隐含层节点的优化,多次尝试,确定最为合理、可行的隐含层节点数,从而有效地解决了神经网络隐含层节点的选取问题。 【abstract] Stock analysis and forecasting is a complex field of study. The paper will make research on stock prediction model based on the analysis of historical data, using BP neural network and technical analysis theory. At the same time, making in-depth theoretical analysis and empirical studies on the short-term closing price forecasts of single stock. Secondly, making research on the model and structure of BP neural network, learning rules, weights of BP algorithm and so on, building a stock short-term forecasting model based on the BP neural network, related with the model of neural network and the ability of generalization. Moreover, using system of multiple-input single-output and single hidden layer, to forecast the sixth day price by BP neural network forecasting model structured. The network of training is chosen BP algorithm of traingdx, while making optimization on the node numbers of the hidden layer by several attempts. Thereby resolve effectively the problem of it. 【关键词】BP神经网络股票预测分析 1.引言 股票市场是一个不稳定的非线性动态变化的复杂系统,股价的变动受众多因素的影响。影响股价的因素可简单地分为两类,一类是公司基本面的因素,另一类是股票技术面的因素,虽然股票的价值是公司未来现金流的折现,由公司的基本面所决定,但是由于公司基本面的数据更新时间慢,且很多时候并不能客观反映公司的实际状况,采用适当数学模型就能在一定
Hopfield神经网络综述
题目: Hopfield神经网络综述 一、概述: 1.什么是人工神经网络(Artificial Neural Network,ANN) 人工神经网络是一个并行和分布式的信息处理网络结构,该网络结构一般由许多个神经元组成,每个神经元有一个单一的输出,它可以连接到很多其他的神经元,其输入有多个连接通路,每个连接通路对应一个连接权系数。 人工神经网络系统是以工程技术手段来模拟人脑神经元(包括细胞体,树突,轴突)网络的结构与特征的系统。利用人工神经元可以构成各种不同拓扑结构的神经网络,它是生物神经网络的一种模拟和近似。主要从两个方面进行模拟:一是结构和实现机理;二是从功能上加以模拟。 根据神经网络的主要连接型式而言,目前已有数十种不同的神经网络模型,其中前馈型网络和反馈型网络是两种典型的结构模型。 1)反馈神经网络(Recurrent Network) 反馈神经网络,又称自联想记忆网络,其目的是为了设计一个网络,储存一组平衡点,使得当给网络一组初始值时,网络通过自行运行而最终收敛到这个设计的平衡点上。反馈神经网络是一种将输出经过一步时移再接入到输入层的神经网络系统。 反馈网络能够表现出非线性动力学系统的动态特性。它所具有的主要特性为以下两点:(1).网络系统具有若干个稳定状态。当网络从某一初始状态开始运动,网络系统总可以收敛到某一个稳定的平衡状态; (2).系统稳定的平衡状态可以通过设计网络的权值而被存储到网络中。 反馈网络是一种动态网络,它需要工作一段时间才能达到稳定。该网络主要用于联想记忆和优化计算。在这种网络中,每个神经元同时将自身的输出信号作为输入信号反馈给其他神经元,它需要工作一段时间才能达到稳定。 2.Hopfield神经网络 Hopfield网络是神经网络发展历史上的一个重要的里程碑。由美国加州理工学院物理学家J.J.Hopfield 教授于1982年提出,是一种单层反馈神经网络。Hopfield神经网络是反馈网络中最简单且应用广泛的模型,它具有联想记忆的功能。 Hopfield神经网络模型是一种循环神经网络,从输出到输入有反馈连接。在输入的激励下,会产生不断的状态变化。 反馈网络有稳定的,也有不稳定的,如何判别其稳定性也是需要确定的。对于一个Hopfield 网络来说,关键是在于确定它在稳定条件下的权系数。 下图中,第0层是输入,不是神经元;第二层是神经元。
基于Hopfield神经网络识别0~9
基于Hopfield 神经网络的数字识别 原理简介: Hopfield 网络是有反馈的全互联型网络,其形式如图2所示,N 为神经元的数目,V 表示神经元的输入向量,U 表示输出向量,W 为神经元之间的权值。离散Hopfield 网络中每个神经元的输出只能取“1”或“-1”两种状态,各神经元的状态可用向量V 表示:V={v 1,v 2 ,…v n }。网络中各神经元彼此互相连接,即每个神经元将自己的输出通过连接权传给其它神经元,同时每个神经元接受其它神经元传来的信息。 图2 有反馈的全互联型网络 Hopfield 网络的稳定性是由能量函数来描述的,即对网络的每个状态发生变化时,能量函数E 随网络状态变化而严格单调递减,这样Hopfield 模型的稳定与能量函数E 在状态空间的局部极小点将一一对应。 设有N 个神经元构成的Hopfield 网络,其中第i 个和第j 个神经元节点状态分别记为vi 和vj ;w 是神经元i 和j 的连接权,θ为神经元i 的阈值。节点的能量可表示为: Ei=-(i i n i j ij v w θ-∑≠)v 则整个Hopfield 网络整体能量函数定义为: E=-i n i i j i n i j ij n i v v v w ∑∑∑=≠=+1121θ 设有N 个神经元构成的Hopfield 神经网络,第i 个神经元在t 时刻所接收的来自其它N-1个神经元输入信号的总和记为ui (t ),t+1时刻第i 个神经元的输出值vi (t+1)是符号函数作用于ui (t )的某个阈值 时,该神经元将触发成兴奋状态。据此可知Hopfield 网络的运行规则为: (1) 在网络中随机地选择一个神经元; (2) 求所选神经元i (1≤i ≤N )的输入总和 u i (t)= i i n i j ij v w θ-∑≠;
BP神经网络算法预测模型
BP神经网络结构及算法 1986年,Rumelhart和McCelland领导的科学家小组在《Parallel Distributed Processing》一书中,对具有非线性连续转移函数的多层前馈网络的误差反向传播算法(Error Back Proragation,简称BP)进行了详尽的分析,实现了Minsky关于多层网络的设想。由于多层前馈网络的训练经常釆用误差反向传播算法,人们也常把多层前馈网络直接称为BP网。釆用BP算法的多层前馈网络是目前应用最多的神经网络。 BP神经网络的结构 BP网络有三部分构成,即输入层、隐含层(又称为中间层)和输出层,其中可以有多个隐含层。各层之间实现完全连接,且各层神经元的作用是不同的:输入层接受外界信息;输出层对输入层信息进行判别和决策;中间隐层用来表示或存贮信息。通常典型的BP网络有三层构成,即只有一个隐层。三层BP神经网络的结构可用图1表示。 图1 三层BP神经网络机构图 BP神经网络的学习算法 BP算法的基本思想是,学习过程由信号的正向传播与误差的反向传播两个过程组成。正向传播时,输入样本从输入层传入,经各隐含层逐层处理后,传向输出层。若输出层的实际输出与期望的输出(教师信号)不符,则转入误差的反向传播阶段。误差反传是将输出误差以某种形式通过隐含层向输入层逐层反传、并将误差分摊给各层的所有神经元,从而获得各层神经元的误差信号,此误差信号即作为修正各神经元权值的依据。这种信号正向传播与误差反向传播的各层权值调整过程,是周而复始地进行的,权值不断调整的过程,也就是网络的学习训练过程。此过程一直进行到网络输出误差减少到可接受的程度,或进行到预先设定的学习次数为止,标准BP算法流程见图2。
BP神经网络模型预测未来
BP神经网络模型预测未来 BP神经网络算法概述: 简介与原理 BP神经网络是一种多层前馈神经网络,该网络的主要特点是:信号前向传递,误差反向传播。在前向传递中,输入信号从输入层经隐含层逐层处理,直至输出层,每一层的神经元状态只影响下一层神经元状态。如果输出层得不到期望输出,则转入反向传播,根据预测误差调整网络权值和阈值,从而使BP神经网络预测输出不断逼近期望输出。 BP神经网络的拓扑结构如下图所示: 输入层隐含层输出层 BP神经网络结构图 图中是BP神经网络的输入值,是BP神经网络的预测值, 为BP神经网络权值。 BP神经网络预测前首先要训练网络,通过训练使网络具有联想记忆和预测能力。BP神经网络的训练过程包括一下几个步骤。 步骤一:网络初始化。根据系统输入输出序列(,) X Y确定网络输入层节点数,n隐含层节点数l、输出层节点数m、初始化输入层、隐含层和输出层神经元之间的连接权值,, ωω初始化隐含层阈值a,给 ij jk
定输出层阈值b,给定学习速率和神经元激励函数。 步骤二:隐含层输出计算。根据输入向量,输入层和隐含层间连接权值,以及隐含层阈值,计算隐含层输出。 步骤三:输出层输出计算。根据隐含层输出,连接权值和阈值,计算BP神经网络预测输出。 步骤四:误差计算根据网络输出和预期输出,计算网络预测误差。 步骤五:权值更新。根据网络预测更新网络连接权值 步骤六:阈值更新。根据网络预测误差更新网络节点阈值。 步骤七:判断算法迭代是否结束,若没有结束,返回步骤二。 下面是基本BP算法的流程图。 BP神经网络的拓扑结构如下图所示: 输入层隐含层输出层 BP神经网络预测的算法流程如下: 步骤一:对初始数据进行标准化。 步骤二:利用原始数据对网络进行训练。 步骤三:对未来第t年第i类污染程度的河流长度比例进行预测。 步骤四:利用第年预测得到的数据作为样本再对网络进行训练。 步骤五:然后令1 t t t=。 =+,回到Step2,直到10 2.建模步骤: Step 1 建立如下网络拓扑结构 表3 网络结构
BP神经网络预测模型
BP 神经网络模型 基本原理 ( 1) 神经网络的定义简介 神经网络是由多个神经元组成的广泛互连的神经网络, 能够模拟生物神经系统真实世界及物体之间所做出的交互反应. 人工神经网络处理信息是通过信息样本对神经网络的训练, 使其具有人的大脑的记忆, 辨识能力, 完成名种信息处理功能. 它不需要任何先验公式, 就能从已有数据中自动地归纳规则, 获得这些数据的内在规律, 具有良好的自学习, 自适应, 联想记忆, 并行处理和非线性形转换的能力, 特别适合于因果关系复杂的非确定性推理, 判断, 识别和分类等问题. 对于任意一组随机的, 正态的数据, 都可以利用人工神经网络算法进行统计分析, 做出拟合和预测. 基于误差反向传播(Back propagation)算法的多层前馈网络(Multiple-layer feedforward network, 简记为BP 网络), 是目前应用最成功和广泛的人工神经网络. ( 2) BP 模型的基本原理[3] 学习过程中由信号的正向传播与误差的逆向传播两个过程组成. 正向传播时, 模式作用于输入层, 经隐层处理后, 传入误差的逆向传播阶段, 将输出误差按某种子形式, 通过隐层向输入层逐层返回, 并“分摊”给各层的所有单元, 从而获得各层单元的参考误差或称误差信号, 以作为修改各单元权值的依据. 权值不断修改的过程, 也就是网络学习过程. 此过程一直进行到网络输出的误差准逐渐减少到可接受的程度或达到设定的学习次数为止. BP 网络模型包括其输入输出模型, 作用函数模型, 误差计算模型和自学习模型. BP 网络由输入层, 输出层以及一个或多个隐层节点互连而成的一种多层网, 这种结构使多层前馈网络可在输入和输出间建立合适的线性或非线性关系, 又不致使网络输出限制在-1和1之间. 见图( 1) . O 1 O 2 O i O m ( 大于等于一层) W (1)… ( 3) BP 神经网络的训练 BP 算法通过“训练”这一事件来得到这种输入, 输出间合适的线性或非线性关系. “训练”的过程可以分为向前传输和向后传输两个阶段: 输入层 输出层 隐含层 图1 BP 网络模型
BP神经网络预测模型
BP 神经网络模型 基本原理 ( 1) 神经网络的定义简介 神经网络是由多个神经元组成的广泛互连的神经网络, 能够模拟生物神经 系统真实世界及物体之间所做出的交互反应. 人工神经网络处理信息是通过信息样本对神经网络的训练, 使其具有人的大脑的记忆, 辨识能力, 完成名种信息处理功能. 它不需要任何先验公式, 就能从已有数据中自动地归纳规则, 获得这些数据的内在规律, 具有良好的自学习, 自适应, 联想记忆, 并行处理和非线性形转换的能力, 特别适合于因果关系复杂的非确定性推理, 判断, 识别和分类等问题. 对于任意一组随机的, 正态的数据, 都可以利用人工神经网络算法进行统计分析, 做出拟合和预测. 基于误差反向传播(Back propagation)算法的多层前馈网络 (Multiple-layer feedforward network, 简记为BP 网络), 是目前应用最成功和广泛的人工神经网络. ( 2) BP 模型的基本原理[3] 学习过程中由信号的正向传播与误差的逆向传播两个过程组成. 正向传播时, 模式作用于输入层, 经隐层处理后, 传入误差的逆向传播阶段, 将输出误差按某种子形式, 通过隐层向输入层逐层返回, 并“分摊”给各层的所有单元, 从而获得各层单元的参考误差或称误差信号, 以作为修改各单元权值的依据. 权值不断修改的过程, 也就是网络学习过程. 此过程一直进行到网络输出的误差准逐渐减少到可接受的程度或达到设定的学习次数为止. BP 网络模型包括其输入输出模型, 作用函数模型, 误差计算模型和自学习模型. BP 网络由输入层, 输出层以及一个或多个隐层节点互连而成的一种多层网, 这种结构使多层前馈网络可在输入和输出间建立合适的线性或非线性关系, 又不致使网络输出限制在-1和1之间. 见图( 1) . O 1 O 2 O i O m 输入层 输出层 隐含层 …… …… ……