非线性系统初步
第七章 非线性系统初步
7.1 引言
在物理世界中,理想的线性系统并不存在。严格来讲,所有的控制系统都是非线性系统。例如,由电子线路组成的放大元件,会在输出信号超过一定值后出现饱和现象。当由电动机作为执行元件时,由于摩擦力矩和负载力矩的存在,只有在电枢电压达到一定值的时候,电动机才会转动,存在死区。实际上,所有的物理元件都具有非线性特性。如果一个控制系统包含一个或一个以上具有非线性特性的元件,则称这种系统为非线性系统,非线性系统的特性不能由微分方程来描述。
本章首先介绍典型非线性环节的特性,然后介绍描述函数法分析非线性系统。
7.2 典型非线性环节
在控制系统中,典型的非线性特性包括饱和特性、死区特性、间隙特性和继电器特性等。了解这些典型非线性特性的物理概念及输入输出关系,是分析实际的非线性系统的前提。本节从物理概念入手,定性地分析几种典型非线性环节的特性。
7.2.1 饱和特性
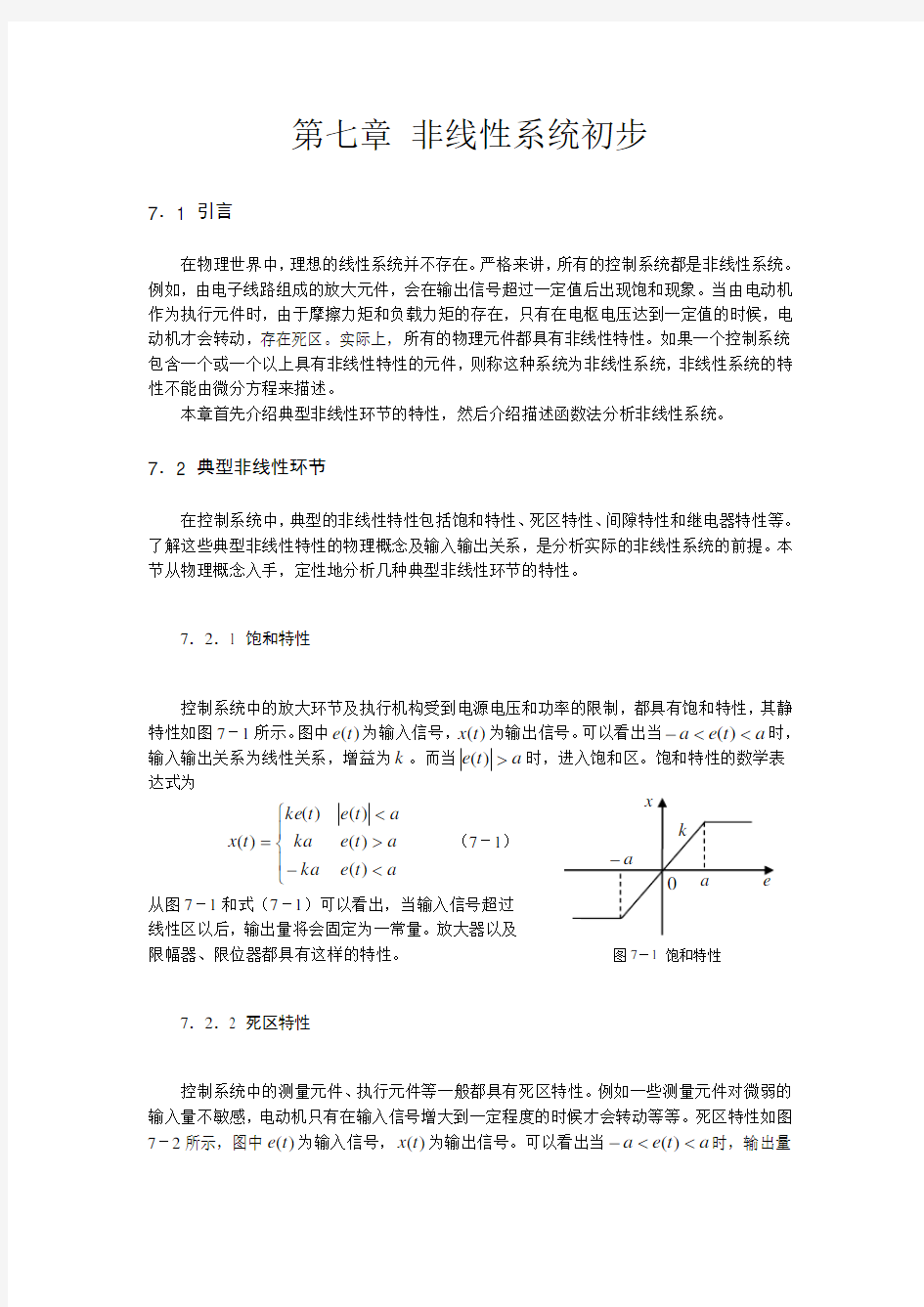
控制系统中的放大环节及执行机构受到电源电压和功率的限制,都具有饱和特性,其静特性如图7-1所示。图中)(t e 为输入信号,)(t x 为输出信号。可以看出当a t e a <<-)(时,输入输出关系为线性关系,增益为k 。而当a t e >)(时,进入饱和区。饱和特性的数学表达式为
??
???<-><=a
t e ka a t e ka
a t e t ke t x )()()()
()( (7-1)
从图7-1和式(7-1)可以看出,当输入信号超过线性区以后,输出量将会固定为一常量。放大器以及限幅器、限位器都具有这样的特性。
7.2.2 死区特性
控制系统中的测量元件、执行元件等一般都具有死区特性。例如一些测量元件对微弱的输入量不敏感,电动机只有在输入信号增大到一定程度的时候才会转动等等。死区特性如图7-2所示,图中)(t e 为输入信号,)(t x 为输出信号。可以看出当a t e a <<-)(时,输出量
图7-1 饱和特性
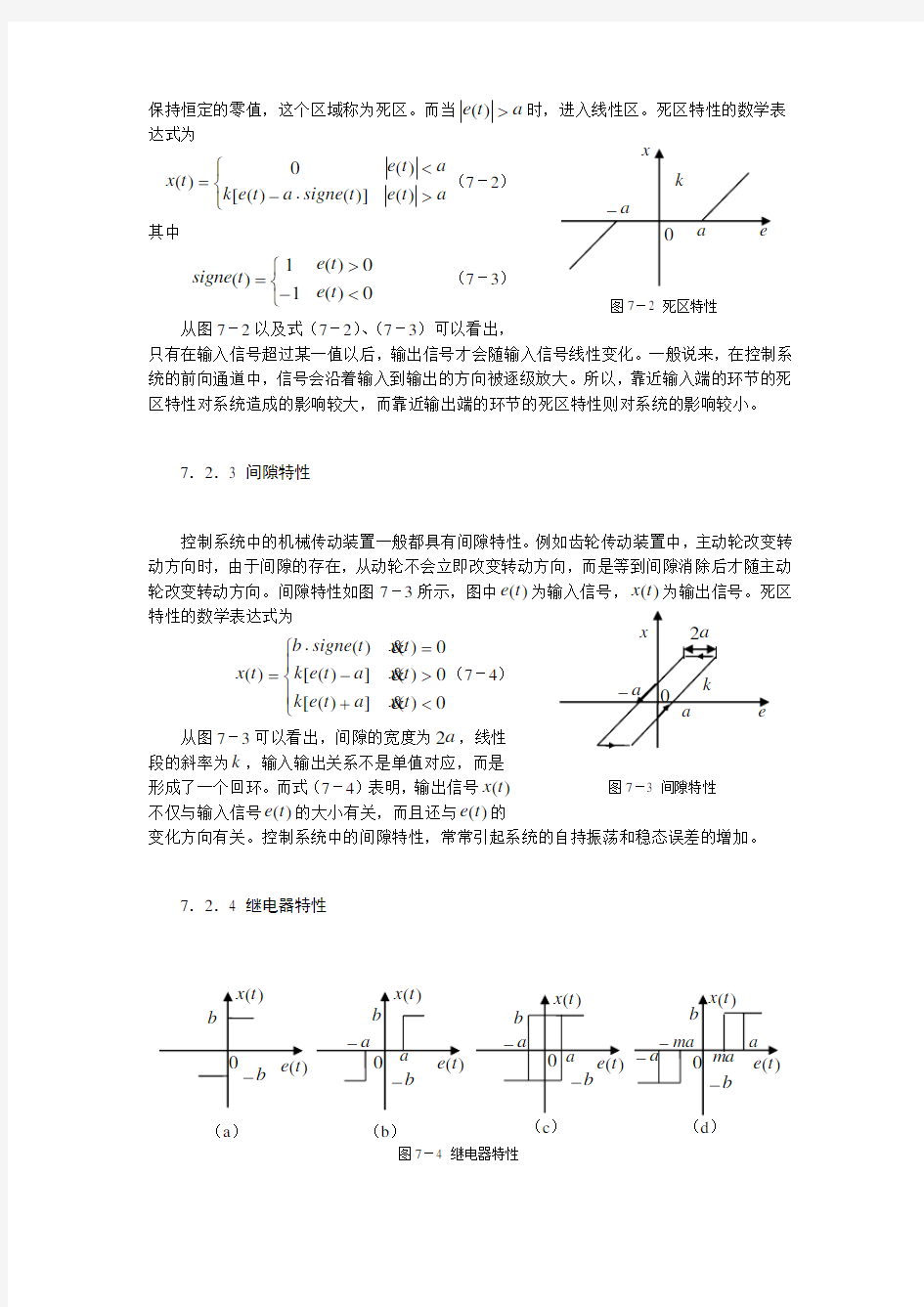
图7-4 继电器特性
(a )
(b )
(c )
保持恒定的零值,这个区域称为死区。而当a t e >)(时,进入线性区。死区特性的数学表达式为
??
?>?-<=a
t e t signe a t e k a
t e t x )()]()([)(0)((7-2) 其中
??
?<->=0
)(10
)(1)(t e t e t signe
(7-3)
从图7-2以及式(7-2)、(7-3)可以看出,
只有在输入信号超过某一值以后,输出信号才会随输入信号线性变化。一般说来,在控制系统的前向通道中,信号会沿着输入到输出的方向被逐级放大。所以,靠近输入端的环节的死区特性对系统造成的影响较大,而靠近输出端的环节的死区特性则对系统的影响较小。
7.2.3 间隙特性
控制系统中的机械传动装置一般都具有间隙特性。例如齿轮传动装置中,主动轮改变转动方向时,由于间隙的存在,从动轮不会立即改变转动方向,而是等到间隙消除后才随主动轮改变转动方向。间隙特性如图7-3所示,图中)(t e 为输入信号,)(t x 为输出信号。死区特性的数学表达式为
??
?
??<+>-=?=0)(])([0)(])([0)()()(t x a t e k t x a t e k t x
t signe b t x &&&(7-4)
从图7-3可以看出,间隙的宽度为a 2,线性段的斜率为k ,输入输出关系不是单值对应,而是形成了一个回环。而式(7-4)表明,输出信号)(t x 不仅与输入信号)(t e 的大小有关,而且还与)(t e 的
变化方向有关。控制系统中的间隙特性,常常引起系统的自持振荡和稳态误差的增加。
7.2.4 继电器特性
图7-2 死区特性
图7-3 间隙特性
继电器在控制系统中应用广泛。而继电器的类型较多,从输入输出关系看,有理性继电器,如图7-4(a)所示;具有死区的继电器,如图7-4(b)所示;具有滞环的继电器,如图7-5(c)所示;具有死区与滞环的继电器,如图7-4(d)所示。死区的存在是由于继电器在输入电流达到一定值的时候,才能执行吸和动作。而滞环的存在是因为特磁元件的磁滞特性使继电器的吸和电流与释放电流不相等。
7.3 非线性系统的特点
非线性系统与线性系统相比,有许多独有的特点:
1)线性系统的稳定性由系统的闭环极点决定,也就是说一旦系统确定,其稳定性也随即确
定,与初始条件和输入信号无关。而非线性系统的稳定性除了与系统的闭环极点相关外,还与初始条件和输入信号相关。对于某一个确定的非线性系统,在一种初始条件下是稳定的,而在另一种初始条件下则可能是不稳定的,或者在一种输入信号作用下是稳定,而在另一种输入信号作用下却是不稳定的。
2)线性系统的运动状态不是收敛与平衡状态,就是发散。理论上说,当系统处于临界时,
会出现等幅振荡。但是在实际情况下,这种状态不可能维持,外界环境或系统参数稍有变化,系统就会趋于平衡状态或发散状态。而非线性系统的运动状态除了收敛和发散以外,还有等幅振荡的状态。这种振荡状态在没有外界作用的情况下,也会存在,而且保持一定的幅度和频率,称为自持振荡、自振荡或自激振荡。自持振荡由系统结构和参数决定,是非线性系统独有的现象。
3)线性系统在输入某一频率的正弦信号时,输出的稳态分量是同频率的正弦信,系统只会
改变输入信号的幅度和相位。而在非线性系统中,当输入信号是某一频率的正弦信号时,输出信号不仅含有同频率的正弦分量,还含有高次谐波分量。因此,在分析线性系统时采用的频率特性、传递函数等方法不能应用于非线性系统的分析。
4)线性系统满足叠加原理。而非线性系统不满足叠加原理。
对非线性系统的分析,重点是系统的稳定性,系统是否产生自持振荡,自持振荡的频率和幅度是多少,如何减小和消除自持振荡等。
7.4描述函数法
描述函数法是一种基于谐波线性化概念,将分析线性系统的频率响应法移植到分析非线性系统中的一种工程近似方法。其基本思想是:当系统满足某种条件时,系统中非线性环节的输出信号中的高次谐波分量可以忽略,用基波近似输出信号,由此导出非线性环节的近似频率特性,即描述函数。此时的非线性系统就近似为一个线性系统,可以用线性系统分析方法中的频率响应法对其进行分析。描述函数法主要用于分析非线性系统的稳定性,是否产生自持振荡,自持振荡的频率和幅度,消除和减弱自持振荡的方法等。
7.4.1 描述函数的基本概念
1.描述函数的概念
设非线性环节的输入信号为正弦信号
t A t e ωsin )(=
则非线性环节的输出信号)(t x 含有)(t e 的基波和高次谐波,可以展开成傅立叶级数的形式
∑∞
=++=10)sin cos ()(n n n t n B t n A A t x ωω
∑∞
=++
=1
0)sin(n n n
t n X
A φω
(7-5)
式中,0A 为直流分量,且有
?
=π
ωπ
20
0)(21t d t x A
?
=πωωπ20cos )(1
t td n t x A n ?
=
π
ωωπ
20
sin )(1
t td n t x B n
2
2n n n B A X +=
n
n
n B A tg 1
-=φ 如果非线性环节的输入输出关系是奇对称的,则式(7-5)中的00=A 。一般高次谐波比基波小,并且控制系统中的线性环节一般都具有低通滤波的特性,使得高次谐波在系统中传输过程中大大衰减。因此,可以近似认为非线性环节的输出信号中,只有基波分量可以沿闭环回路反馈到非线性环节的输入端构成正弦输入)(t e 。输出的基波分量为
)sin(sin cos )(11111φωωω+=+=t X t B t A t x
(7-6)
式中,
?
=π
ωωπ201cos )(1
t td t x A (7-7) ?
=
π
ωωπ20
1sin )(1
t td t x B
(7-8) 21211B A X +=
(7-9) 1
1
1
1B A tg -=φ
(7-10)
定义非线性环节的描述函数为一复函数,其幅度为非线性环节输出信号的基波分量与输入信号幅度之比,其相位为输出信号基波分量与输入信号相位之差。描述函数用符号)(A N 表示,即
1
1)(φj e A
X A N =
(7-11)
式中,)(A N 为非线性环节描述函数;A 为输入正弦信号的幅度;1X 为输出信号基波分量的幅度;1φ为输出信号基波分量相对与输入正弦信号的相移。常见的非线性环节的描述函数见表7-1。
2. 多个非线性环节输入输出关系的计算 1) 非线性环节并联
若两个非线性环节并联,并且非线性特性都是单值函数,则他们的描述函数)(1A N 和
)(2A N 都是实函数,见图7-5。当输入信号t A t e ωsin )(=时,两个环节输出信号的基波
分量分别为
t A A N x ωsin )(111= t A A N x ωsin )(111=
所以并联环节的描述函数为
)()()(21A N A N A N +=
(7-12)
当)(1A N 和)(2A N 是复函数时,也能得出相同的结论。总之,并联非线性环节的描述函数
等于各非线性环节描述函数的和。 2) 非线性环节串联
当两个非线性环节串联时,总的环节的描述函数不是各环节的描述函数的乘积,下面我们做详细的讨论。要求总的环节的描述函数,需要首先计算出串联环节的输入输出关系。如图7-6所示,两个非线性环节串联,其中)(1A N 为死区非线性环节,而
)(2A N 为饱和非线性环节。将前一个
环节的输入输出特性顺时针转90度,重新绘制于后一个环节的正下方,使得前一环节的输出坐标轴与后一环节的输入坐标轴平行,如图7-7(a )、(b )所示。用图解的方法可以得出,前一环节的输入信号由∞-变化到
∞+时,后一个环节的输出信号,如
图7-7(c )所示。图解法中,关键是计算前后非线性环节曲线中转折点
处的对应关系。如果两个非线性环节的的前后次序调换,用图解法计算可以得出等效的非线性特性与调换次序前并不相同,这是非线性环节和线性环节一个明显的区别。
图7-5 非线性环节并联
图7-6 非线性环节串联
)(1A N
)(2A N
图7-7 串联非线性环节的图解
(b )
7.4.2 描述函数法分析非线性系统的稳定性
应用描述函数法,将非线性环节进行谐波线性化后,可以利用线性系统理论中的频域稳定判据分析非线性系统的稳定性,是否产生自持振荡,确定自持振荡的频率和振幅等。当使用描述函数法分析非线性系统稳定性时,通常令输入信号0)(=t r ,将非线性系统简化成一个等效线性部分)(s G 和一个等效非线性部分)(A N 在闭环回路中串联的形式。如图7-8所示,将原系统中的各线性环节等效成)()()()(21s H s G s G s G =。如果系统中有不止非线性环节串联或并联,也要计算出等效的非线性部分的描述函数。
1. 非线性系统的稳定性分析
用描述函数法分析非线性系统的稳定性,首先将系统化简成图7-9所示的形式。系统的频率响应为
)
()(1)
()()()(ωωωωj G A N j G A N j R j C +=
(7-13)
可以看出,当ωj s =时,系统的特征方程为
0)()(1=+ωj G A N
(7-14)
或者写成
)
(1
)(A N j G -
=ω (7-15)
其中,)(/1A N -称为非线性环节的负倒描述函数。)(ωj G 与)(/1A N -之间的相对位置就决定了非线性系统的稳定性,证明略去。
判断非线性系统的稳定性,首先应在s 平面上画出)(ωj G 与)(/1A N -轨迹,并在
)(ωj G 上标明ω增大的方向,在)(/1A N -上标明A 增大的方向。如果非线性系统中的线
性部分满足最小相位条件,则非线性系统稳定性的判定规则如下:
1) 如果)(ωj G 不包围)(/1A N -的轨迹,如图7-10(a )所示,则系统稳定。)(ωj G 离
)(/1A N -越远,系统的相对稳定性越好。
2) 如果)(ωj G 包围)(/1A N -,如图7-10(b )所示,则系统不稳定。
图7-8 非线性系统的结构化简
r
图7-9 非线性系统
3) 如果)(ωj G 与)(/1A N -相交,如图7-10(c )所示。若交点处0ωω=,而0A A =,
设某一时刻有t A t e 00sin )(ω=。可以看出,此信号经过系统闭环回路一周回到输入端仍然为t A 00sin ω,系统中存在一个等幅振荡。该振荡可能是自持振荡,也可能在一定条件下收敛或发散。
2. 自持振荡的确定
当)(ωj G 与)(/1A N -相交时,方程
)
(1
)(A N j G -
=ω 的解对应着一个周期运动的信号的振幅和频率。若这个等幅振荡在系统受到轻微扰动作用后偏离原来的运动状态,而当扰动消失后,系统又回到原来频率和振幅的等幅持续振荡,则这种等幅振荡称为非线性系统的自持振荡。自持振荡是一种稳定的等幅振荡,而不稳定的等幅振荡在系统受到扰动的时候,会收敛、发散或转移倒另一个稳定的周期运动状态。
如图7-11所示,)(ωj G 与)(/1A N -有两个交点a 和b 。假设系统工作在a 点,当受到轻微的扰动时,使非线性环节的振幅增加,即工作点沿)(/1A N -的曲线向A 增大的方向运动到c 点。由于c 点被)(ωj G 包围,属于不稳定点,系统的响应发散。此时,工作点会继续沿)(/1A N -的曲线向A 增大的方向运动至b 点。若系统受到轻微扰动使工作点沿
)(/1A N -的曲线向A 减小的方向运动到d 点。由于d 点不被)(ωj G 包围,属于稳定点,系统的响应收敛。此时,工作点会继续沿)(/1A N -的曲线向A 减小的方向运动,直到A 减小为零。显然,a 属于不稳定的等幅振荡点,不是自持振荡点。
假设系统工作在b 点,当受到轻微的扰动时,使非线性环节的振幅增加,即工作点沿)(/1A N -的曲线向A 增大的方向运动到e 点。由于e 点不被)(ωj G 包围,属于稳定点,系统的响应收敛。此时,工作点会继续沿)(/1A N -的曲线向A 减小的方向回到b 点。若系统受到轻微扰动使工作点沿)(/1A N -的曲线向A 减小的方向运动到f 点。由于f 点被)(ωj G 包围,属于不稳定点,系统的响应发散。此时,工作点会继续沿)(/1A N -的曲线向A 增大的方向回到b 点。显然,b 是一个稳定的等幅振荡点,是自持振荡点。
图7-10 非线性系统稳定性分析
(G )
(A N ∞
(a )
(b )
(c )
图7-11 自持振荡分析
∞0
从上面的分析可以看书,图7-12所示系统在非线性环节的输入信号振幅a A A <时,系统收敛;当a A A >时,系统产生自持振荡。系统的稳定性与初始条件及输入信号有关,这是非线性系统与线性系统的一个明显的区别。判断周期运动点是否是自持振荡点的方法为:如图7-13所示,将)(ωj G 包围的区域看作是不稳定区域,不被)(ωj G 包围的区域看作是稳定区域。当交点处的
)(/1A N -轨迹沿)(/1A N -增大的方向由
不稳定区域进入稳定区域时,该交点时自持振荡点。反之,当交点处的)(/1A N -轨迹沿)(/1A N -增大的方向由稳定区域进入不稳定区域时,该交点不是自持振荡点。
图7-12 自持振荡的判别
-
非线性控制理论和方法
非线性控制理论和方法 姓名:引言 人类认识客观世界和改造世界的历史进程,总是由低级到高级,由简单到复杂,由表及里的纵深发展过程。在控制领域方面也是一样,最先研究的控制系统都是线性的。例如,瓦特蒸汽机调节器、液面高度的调节等。这是由于受到人类对自然现象认识的客观水平和解决实际问题的能力的限制,因为对线性系统的物理描述和数学求解是比较容易实现的事情,而且已经形成了一套完善的线性理论和分析研究方法。但是,现实生活中,大多数的系统都是非线性的。非线性特性千差万别,目前还没一套可行的通用方法,而且每种方法只能针对某一类问题有效,不能普遍适用。所以,可以这么说,我们对非线性控制系统的认识和处理,基本上还是处于初级阶段。另外,从我们对控制系统的精度要求来看,用线性系统理论来处理目前绝大多数工程技术问题,在一定范围内都可以得到满意的结果。因此,一个真实系统的非线性因素常常被我们所忽略了,或者被用各种线性关系所代替了。这就是线性系统理论发展迅速并趋于完善,而非线性系统理论长期得不到重视和发展的主要原因。控制理论的发展目前面临着一系列严重的挑战, 其中最明显的挑战来自大范围运动的非线性复杂系统, 同时, 现代非线性科学所揭示的分叉、混沌、奇异吸引子等, 无法用线性系统理论来解释, 呼唤着非线性控制理论和应用的突破。 1.传统的非线性研究方法及其局限性 传统的非线性研究是以死区、饱和、间隙、摩擦和继电特性等基本的、特殊的非线性因素为研究对象的, 主要方法是相平面法和描述函数法。相平面法是Poincare于1885年首先提出的一种求解常微分方程的图解方法。通过在相平面上绘制相轨迹, 可以求出微分方程在任何初始条件下的解。它是时域分析法在相空间的推广应用, 但仅适用于一、二阶系统。描述函数法是 P. J.Daniel于1940
一种非线性姿态控制律的设计
第32卷第】期20O0年2月 哈尔滨工业大学学报 JOU刚ALOFHARB矾删SⅡIT【『rEOF’IEC唧O加lGY Ⅷ32.No1 №.2000 文章编号:0367—62掣(2000)01.0051.03 一种非线性姿态控制律的设计 王旭,史小平,王子才 (哈尔疾工业太学仿真中心,黑龙江哈尔滨l,∞01) 摘要:根据姿态系统的任务要求人为地选定一输出变量,然后应用微分几何方法,将这一输出变量的零阶及一阶be导数作为新的状态变量,并给出基于这两个新的状态变量的非线性状态反馈控制律.这样通过非 线性状态变换和非线性状态反馈,将飞行器原来的6阶非线性姿态模型部分精确线性化为二阶线性系统. 对降阶后的二所模型使用简单的极点配置方法,并由此确定非线性状态反馈中的反馈系数,从而最终得到非 线性姿态控制律将文中的方法应用于某型飞行器的姿态控制中,仿真结果表明控制效果良好. 关键词:非线性系统;姿态控制;部分线性化;极点配置 中图分类号:TJ76523文献标识码:A m嫡驷ofanon—liII既rattitIlde c蚰删law WANGxu,SHIXia0_piHg,Ⅵ‘ANGZi—cai (s肌l】adonc删er,Ha凼nI舾6tlJteof%h力幽舒,}ia幽n15000】,c知J】a) Abs擅ad:Anewvariableis矗瑙nypr酗ented如anoutputaocordingto£he咖ndt曲kT}l∞出e日e∞锄d矗培tor—derUededvadvesofthisou佃Ⅲnareselectedastwo『1ewstatevad曲Jes.ThenonlinearstatefbedbackconEmllgwinle衄oftllesehvova^abIeSisdedved.ThusbynoflIineargtaIe岫fommdonandn0Idinearstatef曲dback,theodg—inal6ordef110nlinearattimdemodel0faspacecmfti8paItiaUypr。cisely1inea工izedintoa2orderlinearsyst∞1.By锄p10yingthesi。nplepolesassignInentnlethodtothe2orderⅡ?0del,山ecoemcienbint11erIonhnearfeedbackaI_e 6xed.conseql】ennyt|len0“near“tudec衄协ll洲isob忸蛔ed.AppM“gt}Iis papef’sme山odt0 s0Ⅱ七sPacec曲’ salEjtude con帅lprobl锄,simul“onr鸭LIlts}10wst}latt}Ie8ppr∞chisquitedfect№.1确,H吼_凼:n0柑jnears,B胁;at£imdescon舡Dl;p丑It瑚line面zatj船;p0】黜assi静珈eⅡt 线性系统的控制问题无论从理论研究到应用都已发展得十分完善.非线性系统是用一组非线性微分方程来描述,研究其可控性、可观性、解耦、镇定性等一般性问题也都十分困难.利用已有的线性系统理论来解决非线性系统的控制问题,是一个有效的途径.以往对非线性系统的经典线性化方法是在平衡点附近作泰勒级数展开,取其线性主部.这种线性化方法仅在平衡点附近较小的区域内有效.应用微分几何理论,通过非线性状态变换、状态反馈等方法。“,可将某些非线性系统变换为可控线性系统或部分线性化系统.本文针对飞行器姿态控制系统的非线性模型,根据控制要求选定一输出变量.通过非线性状态变换和非线性状态反馈方法,得到了部分线性化可控系统.从而按线性系统的极点配置方法较容易地实现了对该非线性系统的控制.通过仿真证明了本方法的有效性. 1飞行器姿态控制系统的数学模型 收稿日期:1998—06一】6 作者筒介:王旭(1973一)?女,博士生;飞行器的姿态控制系统的模型为-¨千千升rlq'3一,屏.蚀+肆导师 万方数据
(完整word)MIMO非线性系统的反馈线性化初步理论
第五章 MIMO 非线性系统的反馈线性化初步理论 引言: 对于多输入多输出系统仍可以用下列紧缩的形式的方程来描述: )()()(x h y u x g x f x =+=& (*) n R x ∈ 若输入的个数与输出的个数的数目相同时,可令 ) 1( )](),...,([)()1()](),...,([)()()](),...,([)() 1() ,...,() 1(),...,(11111?=?=?=?=?=m x h x h Col x h n x f x f Col x f m n x g x g x g m y y Col y m u u Col u m n m m m )(),...,(),(1x g x g x f m 均是光滑的向量场,)(),...,(1x h x h m 是光滑的函数,均定义在n R 的某个开集上。 5.1 向量相对阶和总相对阶: 一个多变量非线性系统(*),在οx 处有向量相对阶},...,{1m r r 是指: (i) 0)(=x h L L i k f g j 对所有:111-<≤≤≤≤i r k m i m j οx x ∈?的邻域 (ii) m m ?矩阵 ?? ?? ? ? ?????? ??=------)(.. ) (. ...)(..)() (.. )()(11212111 11 12211 1 1x h L L x h L L x h L L x h L L x h L L x h L L x A m r f g m r f g r f g r f g r f g r f g m m m m m 在οx x =处是非奇异的。 注意: (1)该定义涵盖了SISO 系统。 (2)整数m r r ,...,1中的某个i r 是与系统第i 个输出)(x h i 有关的。行向量: )](),...,([111x h L L x h L L i r f g i r f g i m i --,至少有一个元素是非零的,
一类非线性反馈系统的稳定性分析
北京大学学报(自然科学版),第37卷,第1期,2001年1月Acta Scientiarum Naturalium Universitat is Pekinensis,Vol.37,No.1(Jan,2001) 1)国家攀登计划、国家重点基础研究专项经费(G1998020302)和国家自然科学基金(69774007)资助项目 收稿日期:2000203220;修回日期:2000204225 一类非线性反馈系统的稳定性分析 1) 喻学刚 黄 琳 (北京大学力学与工程科学系,北京,100871) 摘 要 利用新近发展起来的积分二次约束(IQC)方法,研究了一类较为普遍的非线性反馈连接的L 22稳定性问题,给出了其稳性分析准则和一些必要条件,这些结果适用于时不变与时变系统。其次,利用已有的结果,研究了非线性环节具有扇区特性的稳定性问题。在单输入单输出(SISO)的情况下,给出了时变系统的圆判据。而在多输入多输出MIMO 的情况下,也给出了一个稳定性判据,该结果不要求其非线性环节具有解藕条件。关键词 积分二次约束(I QC);非线性;适定性;稳定性中图分类号 O TP13 0 引 言 积分二次约束(Integral Quardratic Constraints 简记为IQC)被Yakubovich 首次用来处理含有非线性环节的系统的稳定性问题[1],即所谓的S 2procedure 问题。Safonov 则用反馈环路中两个算子的图的分划来对其结论作几何性解释 [2] 。在过去的一段时间内,鲁棒控制领域出 现和发展了大量的方法,正如在文献[3]中指出的,它们中的大部分可纳入IQC 的框架。因而用IQC 来分析和解决控制问题成为一种重要方法。在35th CDC 上则专门有一分组是关于这方面的(如[4,5]等等)。Megretski 和Rantzer 在[6,7]中详细讨论了IQC 的发展,给出了一个判定系统反馈连接的稳定性的基本定理,并将以往的大量结果纳入其中。但其关于反馈连接的稳定性的判定定理存在一定的局限性。严格说来,其结果一般只能用来判定频域或时不变问题或较简单的时域问题,而对较一般的时域问题,则缺乏有效性。同时由于其稳定性定义中需要因果逆存在[6~8],而这个方面也是系统分析中的难点,已有的结论相对而言比较难于应用于实际工作。本文采用的L 22稳定性的定义类似于大多数文献中[9~ 11] 关于类似问题的定 义,避免了因果逆的检验,这样就相对容易应用于实际工作中。此外,在已有文献的框架中,要求各个算子具有零初值性质,这样就把一大类较为普遍的问题排除在所要考虑的问题之外。本文研究了具有较为普遍形式的反馈内联系统的L 22稳定性,给出了IQC 形式的理论判据。最后,利用前面所得的结果,研究了广义Lur .e 问题,给出了一些稳定性判据。 对于矩阵A I R n @m ,A T 表示A 的转置。对于矩阵B I C n @m ,B * 表示B 的Hermite 转置。RH l @n ]表示在闭的右半平面内没有极点的实有理正则函数组成的空间。L m 2[0,])表示