机器人滚边技术及应用研究
机电一体化系统设计基础课程形考作业
机电一体化系统 形成性考核作业1 一、判断题(正确的打√,错误的打×) 1.机电一体化系统的主要功能就是对输入的物质按照要求进行处理,输出具有所需特性的物质。() 2.系统论、信息论、控制论是机电一体化技术的理论基础,是机电一体化技术的方法论。() 3.信息处理技术是指在机电一体化产品工作过程中,与工作过程各种参数和状态以及自动控制有关的信息输入、识别、变换、运算、存储、输出和决策分析等技术。()4.自动控制是在人直接参与的情况下,通过控制器使被控对象或过程自动地按照预定的规律运行。() 5.产品的组成零部件和装配精度高,系统的精度一定就高。() 6.为减少机械传动部件的扭矩反馈对电机动态性能的影响,机械传动系统的基本固有频率应低于电气驱动部件的固有频率的2~3倍,同时,传动系统的固有频率应接近控制系统的工作频率,以免系统产生振荡而失去稳定性。() 7.传动机构的转动惯量取决于机构中各部件的质量和转速。() 8.在闭环系统中,因齿轮副的啮合间隙而造成的传动死区能使系统以6~10倍的间隙角产生低频振荡,采用消隙装置,以提高传动精度和系统稳定性。() 9.进行机械系统结构设计时,由于阻尼对系统的精度和快速响应性均产生不利的影响,因此机械系统的阻尼比ξ取值越小越好。() 10.滚珠丝杠垂直传动时,必须在系统中附加自锁或制动装置。() 11.采用偏心轴套调整法对齿轮传动的侧隙进行调整,结构简单,且可以自动补偿侧隙。() 12.采用虚拟样机代替物理样机对产品进行创新设计测试和评估,延长了产品开发周期,增加了产品开发成本,但是可以改进产品设计质量,提高面向客户与市场需求能力。() 二、单选题 1.以下产品属于机电一体化产品的是()。 A.游标卡尺B.电话
机器人技术发展与应用
机器人技术的发展与应用调研名称:机器人技术的发展与应用 调研时间:2018年7月29日止 调研人:曹桐滔
目录
一、机器人的发展状况 1.1国外发展概况 日本具有国际上最先进的机器人技术,就全世界范围来看,全球工业机器人约有4成在日本。不论在技术方面,还是在市场规模方面,日本可以称得上是“机器人大国”。日本在2004年5月发布的“新产业发展战略”中所指出的7个产业领域,机器人产业也是其中之一,同时,在进一步实施“新产业发展战略”的“新经济成长战略”报告中也把机器人放在使日本成为“世界技术创新中心”的支柱地位上,并在近两年开始重新审视机器人产业政策。 美国是机器人的诞生地,早在1962年就研制出世界上第一台工业机器人,比起号称机器人王国的日本起步至少要早五、六年。经过40多年的发展,美国现已成为世界上的机器人强国之一,基础雄厚,技术先进。据统计,截止到2009年底,美国运行工业机器人大约有19.4万台。目前,美国工业机器人供应商有AdeptTechnology、AmericanRobot、EmersonIndustrialAutomation等公司。 德国引进机器人的时间比英国和瑞典大约晚了五、六年,但战争所导致的劳动力短缺,国民的技术水平较高等社会环境,却为工业机器人的发展、应用提供了有利条件。此外,20世纪70年代中后期,德国政府采用的积极行政手段也为工业机器人的推广开辟了道路。如在“改善劳动条件计划”中规定,对于一些危险、有毒、有害的工作岗位,必须由机器人来代替。这个计划为机器人的应用开拓了广泛的市场,并推动了工业机器人技术的发展。据统计,截止到2009年底,德国运行的工业机器人为14.58万台。目前,德国工业机器人供应商有KUKA、CLOOS等。 国际上一些大的工业机器人制造厂家,品牌主要分成两大体系,以日本为代表的日韩系,以德国为代表的欧系,其中ABB、安川、发那科三大品牌占据了全球51%的市场,KUKA、OTC、川崎、松下等几大品牌占市场份额的40%以上。
机器人滚边技术入门
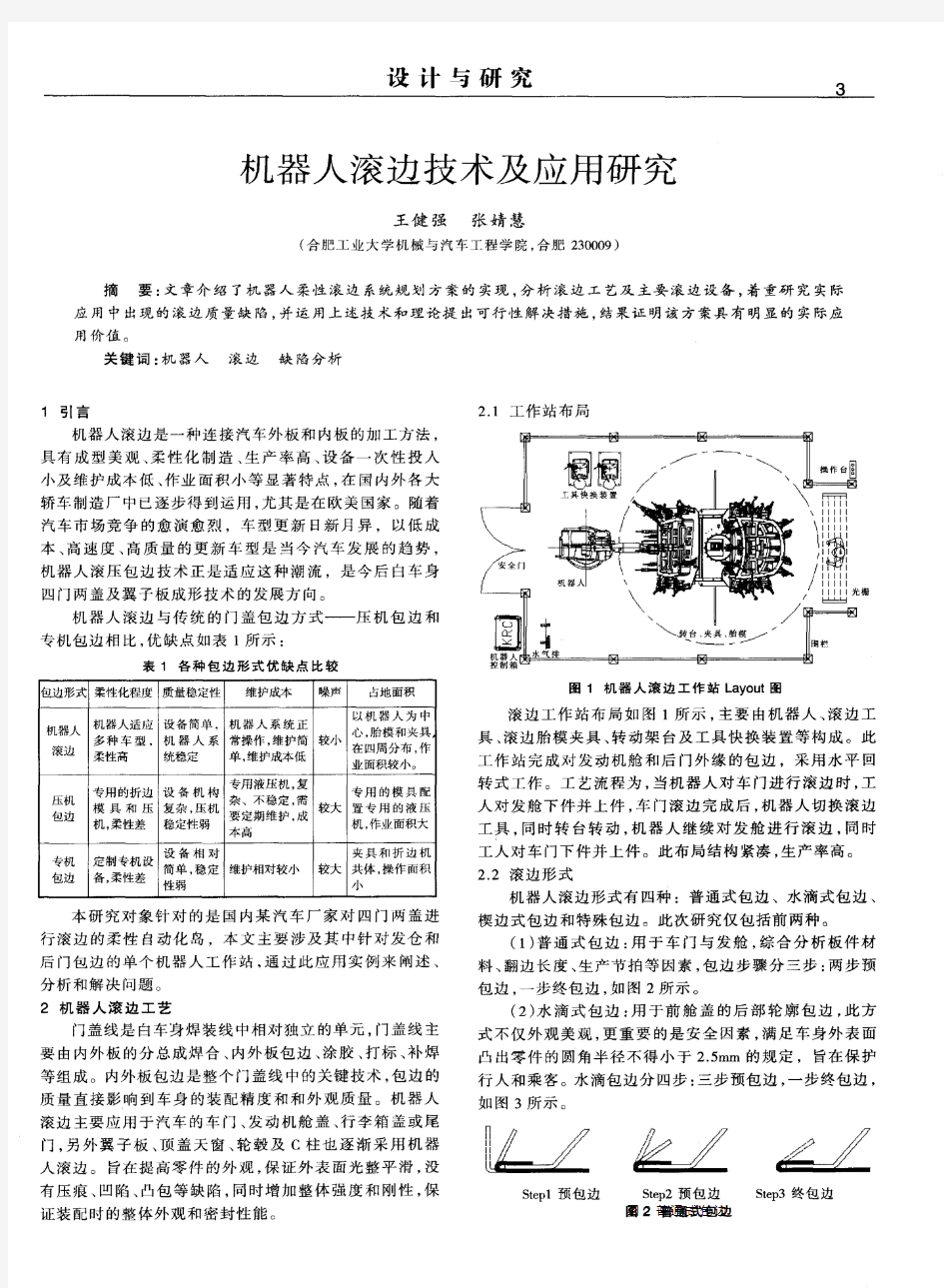
一、ABB机器人滚边系统包括以下几个部分(已门线为例): 1.机器人:根据滚边负荷进行机器人选型(如IRB6640系列) 2.滚头:机器人运动时完成对开启件的滚边,滚头上的滚轮根据产品的特点而选型 3.胎膜:对工件的内外板可靠定位 4.定位夹具:将内外板合装后,由其它工位运到此工位。定位夹具可以保证内外板的 位置关系,确保滚边质量 5.内外板:开启件的外板与胎膜完全贴合,位置由定位夹具保证 二、工艺方法: 1.门线一般采用三次滚压成型法,每次压合角度依次为 75°、 45°、 15°、一般第一遍和第二遍滚边是控制工件尺寸的,最后一边15°是控制表面质量的。也有采用四次滚压成型法的,每次压合角度依次为 90°、75°、 45°、 15°。 2.在局部曲率变化大、形状复杂的部位配以多次滚压法完成滚边压合(如 P1,P2,P3,P4,P5,P6,P7,P8,P9,P10共10点。一般顺序为P1-P10,若P4-P7有波纹,则应为P1,P2,P3,P4,P5,P6,P7,P6,P5,P4,P5,P6,P7,P8,P9,P10)。 3.最后一边滚边由于控制表面质量,所以一般会加Reltool指令: 如MoveL Reltool(P10 ,0,0,0), V300 , Z5,Tool\Wobj;它用于调压力。 或MoveL Reltool(P10 ,0,0,0\Rx:=70\Ry:=45\Rz:=15), V300 , Z5,Tool\Wobj;它用于调压力和微调工具角度。 三、机器人滚边过程中常见的缺陷如下: 1. 外板上出现明显的波纹 2. 角没有完全闭合或角上有小尖尖c 3. 局部宽度过大(在检具上可以检测出来) 4. 外观质量和尺寸缺陷 此上缺陷一般也都是用Reltool指令优化解决
智能机器人学习教程
智能机器人学习教程 第1章预备知识 1.1虚拟机器人的结构与功能 1.1.1身体结构 在VJC1.5中,有五种型号的机器人:AS-M、AS-MII、AS-UII、AS-InfoX和AS-InfoM。图1-1是虚拟机器人的外形。虚拟机器人的身体结构跟真实的能力风暴智能机器人是相似的。本书中的范例采用的机器人型号均为AS-MⅡ。设置机器人型号的方法参见附录B。 图1-1虚拟机器人外形 1.1.2感觉器官 能力风暴智能机器人的感觉功能,是由机器人的传感器实现的。能力风暴机器人身上安装的传感器有以下几种: 1.红外传感器 红外传感器由红外发射器和红外接收器两部分组成。一旦程序中发出“红外测障”的指令,红外发射器就开始发射红外线。红外线遇到障碍物会反射回来,被红外接收器接收,从而机器人就能判断出障碍物所在的方位。虚拟机器人能够检测左、右、前三个方向的障碍物,跟真实的能力风暴智能机器人基本相同。发射红外线的虚拟机器人如图1-2所示。 图1-2机器人发射红外线示意图 2.光敏传感器
光敏传感器能够检测光线的强度,检测到的值为0~255之间的整数。光线越亮,检测到的数值越小;光线越暗,检测到的数值越大。此项功能跟真实的能力风暴智能机器人是一样的 3.碰撞传感器 虚拟机器人的碰撞传感器能够检测左、右、前、后四个方向的碰撞,型号为AS-InfoX 的机器人只能检测前、左、右三个方向的碰撞。如前所述,虚拟机器人共分五种,它们的的区别主要就体现在碰撞检测功能上。所以读者在打开程序时,无论是例程,还是自己编写保存的程序,如果涉及到“碰撞检测”,必须先设置相应的机器人型号(参见附录B),然后再打开程序、仿真运行。例如:打开例程“自由行走(M).flw”时,由于名称后面带有M,故须先将机器人型号设置为AS-M,然后再打开程序文件、仿真运行。打开例程“自由行走(Info).flw”时,最好先将机器人型号设置为AS-InfoM,然后再打开程序文件、仿真运行。 在碰撞检测功能方面,虚拟机器人跟真实的能力风暴智能机器人有较大差别(参见附录 C、D)。 4.声音传感器 声音传感器能够检测声强大小,检测到的值为0~255之间的整数。数值越小,声音越低;数值越大,声音越响。此项功能跟真实的能力风暴智能机器人是一样的。 5.地面灰度传感器 地面灰度传感器能够检测地面的灰度,检测到的值为0~255之间的整数。地面颜色越深,灰度值越大;地面颜色越浅,灰度值越小。此项功能跟真实的能力风暴智能机器人基本相同。 1.1.3编程语言 能力风暴智能机器人的编程语言是VJC1.5,由机器人C语言(简称JC)和流程图编程语言两部分组成。读者使用仿真版的时候,可以用流程图编程。在用流程图编程的同时,VJC1.5自动生成JC代码,便于读者观察、解释或修改程序,参见图1-3。在图1-3中,左边是流程图,右边是JC代码。在流程图编辑界面中,点击工具栏上的“JC代码”快捷按 钮,即可看到当前程序的JC代码。
【配套K12】工业机器人技术及应用(教案)1
工业机器人技术及应用(教案)1 第一章绪论 什么是工业机器人为何发展工业机器人工业机器人发展概况工业机器人的诞生工业机器人的发展工业机器人的分类及应用工业机器人的分类工业机器人的应用学习目标 *掌握工业机器人的定义 *了解工业机器人的发展事和历程 *熟悉工业机器人的常见分类及其行业应用导入案例 富士康“百万机器人”上岗折射中国制造业升级 20XX 年,富士康 CEO 郭台铭表示,希望到 20XX 年底装配 30 万台机器人,到 20XX 年装配 100 万台,要在 5 到 10 年数年内通过自动化消除简单重复性的工序。机器人的投产使用,可将目前的人力资源转移到具备更高附加值的岗位上,这也符合将我国“人口红利”转为“人才红利”的大目标。 这一工业机器人的井喷潮涌,何时会蔓延到“中国制造”的每一个工厂、每一条生产线、每一个工序、每一个工位上,将为“中国制造”的转型提“智”做出何等贡献?我们对此充满期待。课堂认知 什么是工业机器人
机器人涉及到人的概念,成为一个难以回答的哲学问题。 美国:一种用于移动各种材料、零件、工具或专用装置的,通过程序动作来执行种种任务的,并具有编程能力的多功能操作机。 日本: 一种带有存储器件和末端操作器的通用机械,它能够通过自动化的动作替代人类劳动。 中国: 一种自动化的机器,所不同的是这种机器具备一些与人或者生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。 ISO一种能自动控制,可重复编程,多功能、多自度的操作机,能搬运材料、工件或操持工具来完成各种作业。 广义地说:工业机器人是一种在计算机控制下的可编程的自动机器。它具有四个基本特征:①特定的机械机构 ②通用性 ③不同程度的智能④独立性 为何发展机器人 让机器人替人类干那些人不愿干、干不了、干不好的工作。 ABB 给出十大投资机器人的理:第一,降低运营成本;第二,提升产品质量与一致性;第三,改善员工的工作环境;第四,扩大产能;第五,增强生产的柔
国家开放的大学《人工智能专题》形考任务三答案
国家开放的大学《人工智能专题》形考任务三答案 判断题 第一代防火墙是一种动态的防护。× 自然语言理解可能会导致很多人失业。√ 大数据具有全面性的特点。√ 第三代防火墙利用大数据和机器智能技术对业务逻辑进行分析。√ 大数据能跟踪每一个商品和每一笔交易。√ 人工智能在医学领域的应用包括读片、标本分类和疾病诊断。√ 通过物联网技术可以实现智能化识别、定位、跟踪、监控和管理。√ 第二代防火墙通过数据驱动的方法,在系统层面做分析。√ 智能交通是解决交通堵塞的有效方法。√ GPU、DSP等图像处理硬件技术的飞速进步,为机器视觉飞速发展提供了基础条件√ 智能物流在一定程度上能够减少自然资源和社会资源消耗。√ 智能制造的发展是我国由制造大国向制造强国转型升级的关键。√ 2010年,无人驾驶汽车已经在公路上行驶了大概20万英里。× 无人驾驶汽车是街景项目的一个延伸。√ 智能制造服务从根本上改变了传统制造业产品研发、制造、销售、运输和售后服务等环节的运营模式√ 无人驾驶汽车会减少交通事故率√ 传感器是物联网实现的基础和前提。√ 选择题 以下属于物联网关键技术的是(A. 激光扫描器B. 全球定位系统D. 红外感应器) 机器视觉的基本功能包括(①模式识别/计数②视觉定位③尺寸测量④外观检测) 扫地机器人是属于(服务业机器人) RFID指(A. 射频识别) 科幻小说作家艾萨克·阿西莫夫在小说《我,机器人》中为机器人定了三个原则,其中不包括(. 应能保护人类) 视觉定位)主要指在识别出物体的基础上,精确给出物体的坐标和角度信息。
智能制造装备产业“十二五”发展规划》将智能制造装备定义为:智能制造装备是具备感知、(分析推理决策)、控制功能的制造装备。 规模化生产后,机器视觉在(成本)上将远低于人工。 机器人的特点不包括(主观能动性)。 机器视觉系统包括(①图像获取②图像处理③图像分析④图像输出或显示) 在( 20世纪70年代),人类基本上开始解决语音识别的问题。 智能物流是连接客户、(D. 供应链)和制造业的重要环节 下列不属于智能制造服务的是(工业机器) 机器人的基础研究层面主要是研究(124)①控制技术②传感技术③智能机器人④行动规划酒吧管理的应用开发,体现了(传感器)的数据采集技术的应。 达芬奇手术机器人的准确性能达到(0.02毫米)。 (智能转运设备)可智能地计算出物流转运的最优路径,高效地将货物运送到目标仓库。
机器人滚边在汽车行业中的实际运用
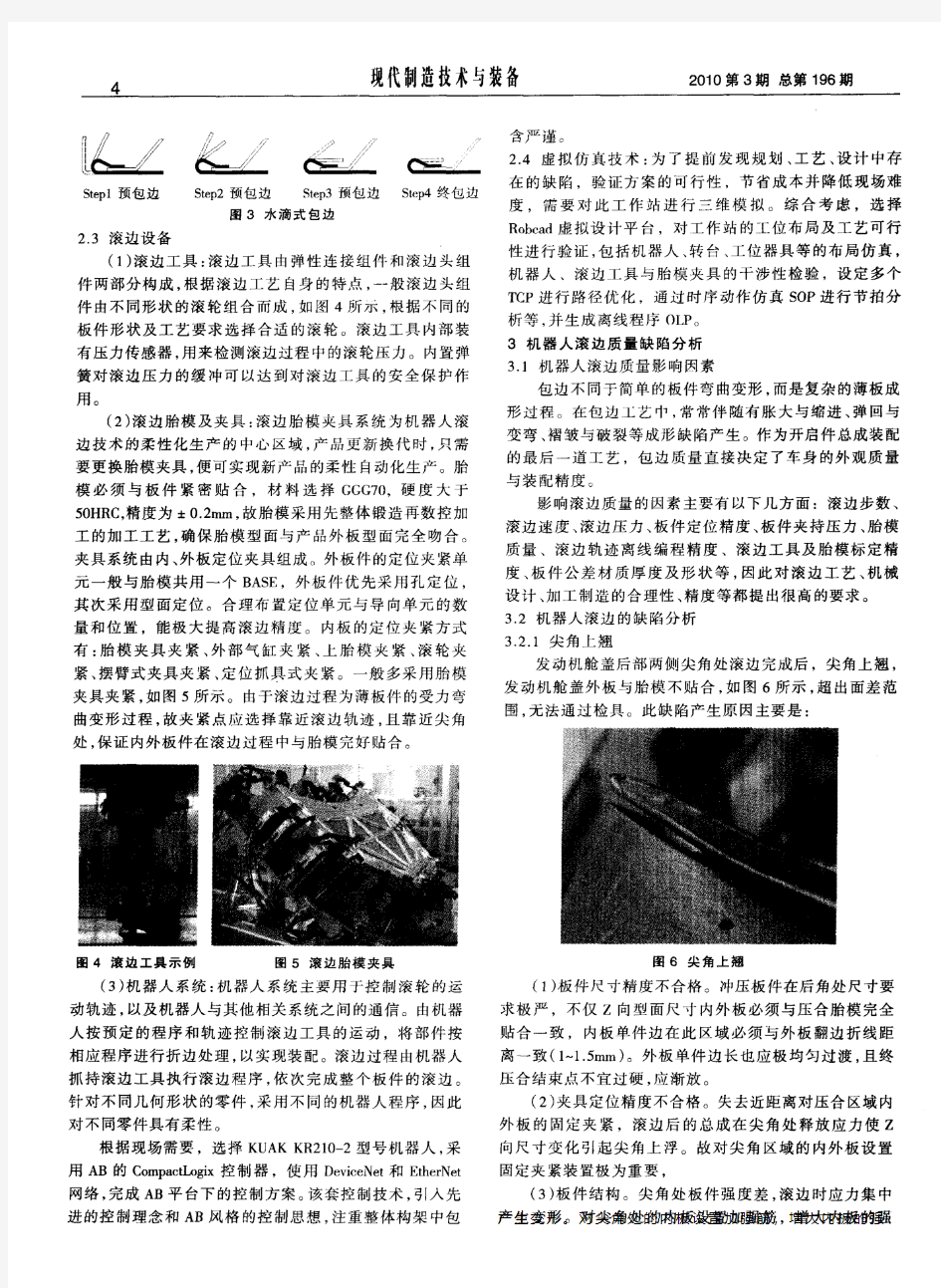
机器人滚边在汽车行业中的实际运用 【字体:大中小】时间:2014-11-16 11:32:05 点击次数:20次 当前,车身门盖内外板的连接通常都使用包边工艺,使用传通模具和压机进行冲压包边时,由于外板的包边轮廓要根据车身外形的变化而变化,沿整个轮廓包边的角度也不同,包边过渡急剧的区域和包边角度过大的区域,包边都会非常困难。同时,传统的冲压包边模具占地多,成本高,柔性差。为缩短汽车开发周期、提高产品竞争力,新型内外板的连接技术—机器人滚边技术逐渐应用于车身生产中。 1 机器人滚边技术及现状 机器人滚边系统主要包括三大部分:滚边夹具系统、滚轮系统、机器人及其控制系统。滚边夹具系统用于将待滚边钢板固定在滚边模具上,而滚轮系统中,滚边头固定在工业机器人上,滚边头上面的滚轮根据折叠加工步骤的不同进行选取,通过滚轮将外部钢板的边缘绕里面的钢板进行弯曲。机器人及其控制系统主要用于控制滚轮的运动轨迹,以及机器人与其它相关系统间的通信,可根据车身外形变化设定程序,以满足不同零件形状的滚边需求。在滚边时,滚边头通过压力装置将压力传给滚轮,通过滚轮施加作用力将工件在冲压过程中预留的翻边向内侧翻折,从而将外板的待包边紧紧压紧内板,使外板和内板被整合成一体。 与传统的冲压包边相比,机器人滚边由于模具数量少,包边单元的投资和维护费用都相对较低,且其开发时间和投入使用的准备时间比较短。另外滚边系统具有极高的灵活性,不同型号可以在同一个制造单元中生产,滚边机器人还可以在制造单元中进行其他抓取和涂胶等任务。滚边零件的成形精度高,便面质量好。因此,机器人滚边技术已经成为塑性加工领域的一个研究热点,这得益于国内外许多科研机构和大型汽车制造企业的深入研究。现在国内外一些先进的汽车制造企业已将此项技术应用于制造外挂件,如车门,后盖和发动机罩,其它的应用领域包括天窗开口,以及轮罩包边。 2 滚边机器人现实应用案例 本案例中,零件为发动机盖,将零件外板和内板利用机器人滚边压合在一起。 2.1 工艺方法 本案例中,零件上下侧采用三次滚压成型法,每次压合角度依次为30°、60°、90°,左右采用,四次滚压成型的工艺过程,每次压合角度依次为30°、90°、120°、180°。从以上可以看出本案例为明显的欧式压合风格。 2.2 机器人的选型
机器人技术及其应用结课论文
大学 机 器 人 技 术 及 应 用 结 课 论 文
智能引领未来 摘要: 智能引领未来,机器人能力将远胜人类,这不是梦想;未来的机器人也能自主的学习和思考,工作能力将远远超过人类,能承担大量人类所不能及的工作,进一步推动智能科学的发展,促进社会的进步,促进经济的高速增长,而实现智能化必须依靠强有力的硬件系统,就机器人而言,其身上集成了多种处理器、存储器与大量的传感器,设想,当这些器件不断地走向高端化、微型化、进一步集成化,那么机器人的处理速度将进一步提高,质量与体积将大大减小,机器人将越来越”聪明“。 关键词: 机器人、智能、硬件系统、高端化、集成化、微型化、聪明。 引言: 现在的机器人与人类比较起来,机器人不能自主学习与自主思考,缺乏情感,必须需要接收人的命令才能执行相关命令,或者事先就把各种命令存储到机器人的大脑中,有需要的时候就执行命令。随着集成电路的飞速发展,处理器、存储器、传感器等电子元件的高端化、微型化、集成化,机器人的处理速度将大大提高,质量与体积将大大减轻,机器人会变得越来越”聪明“。 集成电路前景优越 芯片即集成电路产业是国民经济和社会发展的战略性、基础性、先导性产业,在计算机、消费类电子、网络通信、汽车电子等几大领域起着关键作用,是全球主要国家或地区抢占的战略制高点,尤其是发达国家在这一领域投入了大量创新资源,竞争日趋激烈。 随着技术的不断进步,新的元件结构和材料上的变革都将对机器人的发展战略起到决定作用。在晶圆代工产业,14nm/16nm的FinFET器件已取得了一定的发展。拥有较低泄漏率和更高速度的低功率晶体管备受瞩目。3DNAND使平面NAND 降到20nm以下,创造出外形更小巧、位密度更高的产品。 为了改进3D设备的性能,未来的逻辑芯片和晶圆代工设备的解决方案需要采用选择性外延与高k金属栅电极材料加工工艺,以提高晶体管的速度,降低泄漏率。低功耗、高性能的晶体管则能丰富移动设备的功能,同时延长电池寿命, 3DNAND需要HAR蚀刻、阶梯绘图、多层堆叠沉积和高选择性硬模等技术的支持,从而在小巧的外形空间内实现高密度存储,这对智能化设备,如对机器人来说简直就是如虎添翼啊! 随着LED产业发展越来越趋于健康和理性,LED领域设备需求也更多来自于新工艺、新技术的驱动,而非简单生产规模的扩张,比如倒装芯片与高压芯片被认为是目前最具有发展前景的LED芯片技术,而这两种技术也带动了深槽刻蚀设备和金属反射层镀膜设备等新设备、新工艺的需求。除此之外,还有AlN镀膜设备、高亮度红黄光芯片刻蚀设备等设备的需求。 集成电路引导未来生活 一张0.5毫米厚的世博会门票,其“真实面目”是个集成电路产品。门票里装了RFID芯片,当门票靠近读卡机时,门票上的线圈会感应出电流,电流便驱
2020年电大《科学与技术》形考任务三
一、填空题(10分)(如果以附件形式提交,请在输入框中输入“见附件”) 1.宇宙中最主要天体类型是恒星和星云 2.板块构造说的理论是在大陆漂移学说、海底扩张学说的基础上发展起的。 3.世界上第一个微处理器是.Intel 4004 ,诞生于1971 年。 4.世界上第一个提出集成电路思想的人是达默。 二、名词解释(10分)(如果以附件形式提交,请在输入框中输入“见附件”)1.星系 2.地球圈层结构 3.CPU 4.计算机病毒 1.星系:由无数恒星和星际物质构成的巨大集合体称为星系。 2.地球圈层结构:地球外部圈层结构指地球外部离地表平均800千米以内的圈层,包括大气圈、水圈和生物圈。 3.CPU:在计算机中,通常将运算器和控制器合起来称为“中央处理器”,简称CPU。 4.计算机病毒:计算机病毒是仿造生物病毒建立起的概念,它是指可以制造故障的一段计算机程序或一组计算机指令。 三、简答题(30分)(如果以附件形式提交,请在输入框中输入“见附件”)简述宇宙的未来。(15分) 按照大爆炸模型,宇宙在诞生后不断膨胀,与此同时,物质间的万有引力对膨胀过程进行牵制。这里有两种可能: 一种可能是宇宙膨胀将永远继续下去。如果宇宙总质量小于某一特定数值,则引力不足以阻止膨胀,宇宙就将一直膨胀下去。在这个系统里,引力虽不足以使膨胀停止,但会不断地消耗着系统的能量,使宇宙缓慢地走向衰亡。宇宙越来越稀薄和寒冷,直至物质本身最后衰亡,只剩下宇宙背景辐射。到非常遥远的将来,所有的恒星燃尽熄灭,茫茫黑暗中潜伏着一些黑洞、中子星等天体。出现寒冷、黑暗、荒凉而又空虚的宇宙,它已经走完了自己的历程,达到了“热寂”的状态。 另一种可能是膨胀停止而代之以收缩。如果宇宙的总质量大于某一特定数值,那么总有一天宇宙将在自身引力的作用下收缩,造成与大爆炸相反的“大坍塌”。收缩过程与大爆炸后的膨胀是对称的,像一场倒放的电影。在最后的时刻实现“大紧缩”,宇宙逆转回到出发点。引力成为占绝对优势的作用力,所有的物质都因挤压不复存在,一切有形的东西,包括空间和时间本身,都被消灭,成为一切事物的末日。宇宙在大爆炸中诞生于无,此刻也归于无。宇宙是膨胀还是收缩这两种可能主要取决于宇宙物质的总量。根据目前的估算,宇宙物质的总量只达到要使宇宙重新坍缩的临界质量的百分之十左右,因此如果仅仅依据观测证据,则可预言宇宙会继续无限地膨胀下去。但是可能还有其他种类的暗物质未被我们探测到,可能最普通的基本粒子中微子也存在静止质量,只要其中任何一个问题的答案是肯定的,那么总引力便足以阻止膨胀,宇宙最终可能会坍缩。 此外,宇宙大爆炸学说在两个关键问题上无法解释:其一,大爆炸以前宇宙的图景如何?大爆炸宇宙的理论不能外推到大爆炸之前,尚不能确切地解释“在所存物质和能量聚集在一点上”之前到底存在着什么东西,是什么引起了大爆炸。其二,如果宇宙最终重新坍缩回到原点,又会发生什么?有天文学家提出了宇宙“无始无终” 论:宇宙一直在反复地收缩然后又膨胀着。宇宙曾经处于体积非常大、物质密度非常小的状态,它在万有引力作用下渐渐收缩、聚拢起来,直到所有的物质统统撞到一起
Flexible Robotic Hemming - ABB柔性机器人滚边
Full Range of Standardized and Flexible Robotic Hemming Solutions For small and high production rates The heart of Robotics
Hemming perfection ABB has developed and patented a unique hemming tool suited to the robotic process which easily provides very high hemming quality. It includes: ?Programmable adjustment of hemming force during the process, guaranteeing high hemming quality. ?A business software program enabling minimum programming time and rapid adjustment of hemming parameters.Quality is obtained in record time, sig-nificantly reducing set-up times. ?The possibility of changing the tool automatically, depending on the process. Pre-hemming operations in the corners of the part are eliminated. The continuous action of the roller on the part ensures reliable hemming, perfectly closed along the full length, with no contour discontinuity. The surface quality and regularity of the hemming radius are guaranteed by the principle of the hemming tool.
人工智能机器人学导论
人工智能机器人学导论 (1) 简介: (1) 作者简介 (2) 机器人控制器与程序设计 (3) 简介: (3) 机器人制作入门篇 (6) 简介: (6) 作者简介 (6) 机器人智能控制工程 (8) 简介: (8) 人工智能机器人学导论 作者:Ricky 文章来源:本站原创更新时间:2006年05月03日打印此文浏览数:2370 Slides for Second Edition (Beta) Chapter 1: What are Robots?. ppt slides and the pdf version (good a quick look) Chapter 2: Telesystems. the pdf version Chapter 3: Biological Foundations of the Reactive Paradigm. ppt slides and pdf version Chapter 5: The Reactive Paradigm Chapter 6: Selecting and Combining Behaviors Chapter 7: Common Sensors and Sensing Techniques Chapter 8: Designing a Behavior-Based Implementation Chapter 9: Multi-Agents Chapter 10: Navigation and the Hybrid Paradigm Chapter 11: Topological Path Planning Chapter 12: Metric Path Planning Chapter 13: Localization and Mapping Chapter 14: Affective Robots Chapter 15: Human-Robot Interaction Chapter 16: What Can Robot Do and What Will They Be Able to Do? 简介: 本书系统地介绍了人工智能机器人在感知、导航、路径规划、不确定导航等领域的主要内容。全书共分两大部分。第一部分共八章,它定义了什么是人工智能机器人,并介绍了为什么需要人工智能。重点介绍了人工智能机器人中智能组织的三个主要结构范式:慎思式、反应式及慎思/反应混合式。这部分还专门介绍了反应式行为的感知和编程技术,以及多智能体群体之间的协调和控制等问题。第二部分共四章,其中三章讲述了定性和定量导航、路径规划技术和在不确定性管理方面的工作。最后一章总结性地介绍了计算机视觉方面的最新技术在机器人中的应用,以及移动机器人在各个领域应用的发展展望。本书每章后均附有参考文献和习题。许多章节还列举了一些实例,用以说明本书讲述的概念和方法在实际机器人中的应用。本书内容丰富,反映了智能机器人学的基础和先进的理论和技术。本书可作为计算机、电子及自动化等专业本科高年级学生和研究生的教材或参考书,也可供从事智能机器人方面研究的教师和研究人员学习参考。
信息技术与教育技术(1)形考作业第四单元自测题参考答案
信息技术与教育技术(1)形考作业第四单元自测题参考答案 标签:开放大学信息技术与教育技术(1 形成性考核参考答案 一、判断题 题目1信息技术学习环境下,学生能获得更多的相关知识的刺激,更丰富的学习情景,文本、图形、图像、视频、声音等多种形式的信息被结合在一起。(对) 题目2既然利用了信息技术,教师就不需要根据学生练习出现错误的类型和数量级来评功估学生对这一知识的掌握情况。(错) 题目3整合课程实现的是学生的经验整合、社会整合和知识整合。“对”。 题目4传统的课堂教学很容易实现个别辅导。正确的答案是“错”。 题目5信息技术与课程整合是一个的简单过程,存在着固定的模式,教师只要掌握这个模式,就能在教学中应用自如。“错”。 题目6教师在确定教学内容时,只需关注本学科内容,不需要注意信息技术对本学科内容的影响而导致学习内容的变化。“错”。 题目7在多媒体教学环境中,教师的作用是创设适合于学生先前经验和教学内容的情景,激发学生们的学习兴趣和探索欲望,让学生利用信息资源、同学资源、教师资源主动建构知识,教师从知识的传授者变为学生学习活动的设计者、组织者和促进者,从中心走向边缘。“对”。 题目8整合了信息技术的教学与传统教学相比,对于培养学生的“学科思维”没有任何优势。“错”。 题目9计算机操练和练习反馈的设计是关系到操练与练习软件成败的至关重要的内容。任何计算机操练与练习的反馈,都需要遵循一定的反馈原则。“对”。 题目10信息技术运用于教育、整合于课程为教师角色的转变提供了条件,网络的平等性使学生可以和教师站的一样高,甚至出现“前喻”文化,教师也能从学生身上获得成长的资源,师生角色的不断互换使双方都不断成长。“对”。 二、单选题 (A )题目11从狭义上说,信息技术(Information Technology)是指以微电子技术、通信技术、 为主干,结合集成电路技术、光盘技术、机器人技术、高清晰度电视技术等的综合技术. A. 计算机技术 B. 文字
工业机器人技术应用
2018年江苏省高等职业院校技能大赛 “工业机器人技术应用”赛项竞赛规程 一、赛项名称 工业机器人技术应用 二、竞赛目的 赛项以“中国制造2025”规划为背景,针对装备制造业转型升级对岗位技能提升的要求,引导职业院校关注行业在“工业机器人技术应用”方面的发展趋势及新技术的应用,促进工学结合人才培养模式和课程的改革与创新。通过技能大赛,展示参赛选手维护、调试、操控机器人的技能,检阅参赛队组织管理、团队协作、工作效率、质量与成本控制、安全意识等职业素养,提升高职院校专业教师的指导水平,以赛促教,为工业机器人及系统在企业中的应用提供人才保障。 三、竞赛方式 竞赛为团体赛。每支参赛队最多由6人组成,其中领队1人(可由指导教师兼任),参赛选手3人(其中队长1人),指导教师2人。 四、竞赛内容 参赛选手在规定时间(4小时30分钟)内,以现场操作的方式,根据赛场提供的有关资料和赛项任务书,完成基本赛项任务及综合赛项任务。 基本赛项任务: 1.生产线空间位置调整、传感器安装及基本功能调试。 2.六关节机器人手爪的安装及手爪控制设备的安装调试。 3.六关节机器人参数设定、标定、现场示教编程及复现;六关节机器人安全工作区间建立。 4.AGV机器人上部输送线安装与调试;工业以太网络连接等。
5.按任务要求完成机器视觉系统的设定、流程编辑,实现托盘流水线上的缺陷工件检测和工件形状种类的识别、工件库建立及坐标变换。 6.完成满足控制要求的立库码垛机和主控系统的人机界面及PLC 控制程序编制。 7.主控PLC、触摸屏、六关节机器人、流水线、立体仓库的网络建立和程序联调测试。 综合赛项任务: 1.由裁判将放有工件的托盘随机摆放到立库各仓位中,由立库码垛机根据赛项任务书的要求,依次取出托盘并放置到磁导AGV小车上。 2.磁导AGV小车每次可以携带3个托盘,沿着磁导线运动并对接到托盘流水线,自动完成立库与托盘流水线之间的工件运输。 3.托盘流水线上设置了视觉检测系统,通过对托盘上的工件进行识别,区分出不同的工件;并将托盘中工件的坐标数据传送到主控PLC 中。 4.由主控PLC通过工业网络操控多关节机器人实现所有工件的抓取、摆放和装配。 1)选用合适的工具自动抓取托盘上不同类型的工件,对合格工件和缺陷工件进行分拣; 2)根据赛项任务书的要求,将抓取的合格工件摆放在装配流水线上的相应位置以完成装配。工件在装配流水线上的具体摆放方式以及装配要求在赛项任务书中有明确规定。 五、竞赛试题 (一)采取提前公开竞赛样题的方式进行比赛,赛前一个月公布样题。 (二)备有10套以上竞赛用试题,每场次比赛试卷由赛点裁判组
2018电大本科《传感器与测试技术》形考
2018电大本科《传感器与测试技术》形考1-4 形考作业一 一、判断题(Y对/N错) 1.测试技术在自动控制系统中也是一个十分重要的环节。Y 2.金属应变片的灵敏系数比应变电阻材料本身的灵敏系数小。Y 3.热敏电阻传感器的应用范围很广,但是不能应用于宇宙飞船、医学、工业及家用电器等方面用作测温使用。N 4.电容式传感器的结构简单,分辨率高,但是工作可靠性差。N 5.电容式传感器可进行非接触测量,并能在高温、辐射、强烈振动等恶劣条件下工作。Y 6.电容式传感器不能用于力、压力、压差、振动、位移、加速度、液位的测量。Y 7.电感传感器的基本原理不是电磁感应原理。N 8.电感式传感器可以将被测非电量转换成线圈自感系数L或互感系数M的变化,再由测量电路转换为电压或电流的变化量输出。Y 9.互感传感器本身是变压器,有一次绕组圈和二次绕组。Y 10.差动变压器结构形式较多,有变隙式、变面积式和螺线管式等,但其工作原理基本一样。Y 11.传感器通常由敏感器件、转换器件和基本转换电路三部分组成。Y 12.电容式传感器是将被测量的变化转换成电容量变化的一种传感器。Y 13.电阻应变片的绝缘电阻是指已粘贴的应变片的引线与被测试件之间的电阻值。Y 14.线性度是指传感器输出量与输入量之间的实际关系曲线偏离拟合直线的程度。Y 15.测量误差越小,传感器的精度越高。Y 16.传感器的灵敏度k等于传感器输出增量与被测量增量之比。N 17.传感器能检测到输入量最小变化量的能力称为分辨力,当分辨力以满量程输出的百分数表示时则称为分辨率。Y 18.测量转换电路首先要具有高精度,这是进行精确控制的基础。N 19.电桥是将电阻、电容、电感等参数的变化转换成电压或者电流输出的一种测量电路。Y
智能机器人关键技术及其发展趋势
智能机器人的关键技术及其发展趋势 机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。按联合国标准化组织采纳了美国机器人协会给机器人下的定义,即为:一种可编程和多功能的,用来搬运材料、零件、工具的操作机;或是为了执行不同的任务而具有可用电脑改变和可编程动作的专门系统。 而智能机器人有相当发达的“大脑”。在脑中起作用的是中央计算机,这种计算机跟操作它的人有直接的联系。它给人的最深刻的印象是一个独特的进行自我控制的“活物”。其实,这个自控“活物”的主要器官并没有像真正的人那样微妙而复杂。到目前为止,在世界范围内还没有一个统一的智能机器人定义。大多数专家认为智能机器人至少要具备以下三个要素:一是感觉要素,用来认识周围环境状态;二是运动要素,对外界做出反应性动作;三是思考要素,根据感觉要素所得到的信息,思考出采用什么样的动作。 智能机器人根据其智能程度的不同,又可分为三种: 传感型机器人,又称外部受控机器人。机器人的本体上没有智能单元只有执行机构和感应机构,它具有利用传感信息(包括视觉、听觉、触觉、接近觉、力觉和红外、超声及激光等)进行传感信息处理、实现控制与操作的能力。受控于外部计算机,在外部计算机上具有智能处理单元,处理由受控机器人采集的各种信息以及机器人本身的各种姿态和轨迹等信息,然后发出控制指令指挥机器人的动作。目前机器人世界杯的小型组比赛使用的机器人就属于这样的类型。 交互型机器人,机器人通过计算机系统与操作员或程序员进行人-机对话,实现对机器人的控制与操作。虽然具有了部分处理和决策功能,能够独立地实现一些诸如轨迹规划、简单的避障等功能,但是还要受到外部的控制。 自主型机器人,在设计制作之后,机器人无需人的干预,能够在各种环境下自动完成各项拟人任务。自主型机器人的本体上具有感知、处理、决策、执行等模块,可以就像一个自主的人一样独立地活动和处理问题。机器人世界杯的中型组比赛中使用的机器人就属于这一类型。全自主移动机器人的最重要的特点在于它的自主性和适应性,自主性是指它可以在一定的环境中,不依赖任何外部控制,完全自主地执行一定的任务。适应性是指它可以实时识别和测量周围的物体,根据环境的变化,调节自身的参数,调整动作策略以及处理紧急情况。交互性也是自主机器人的一个重要特点,机器人可以与人、与外部环境以及与其他机器人之间进行信息的交流。由于全自主移动机器人涉及诸如驱动器控制、传感器数据融合、图像处理、模式识别、神经网络等许多方面的研究,所以能够综合反映一个国家在制造业和人工智能等方面的水平。因此,许多国家都非常重视全自主移动机器人的研究。 下面就机器人的控制技术以及列举几种常见的机器人对当前智能机器人的关键技术进行分析。
工业机器人常见五大应用领域及关键技术【最新整理】
工业机器人常见五大应用领域及关键技术 去年全球工业机器人销量达到24万台,同比增长8%。其中,我国工业机器人市场销量超过6.6万台,继续保持全球第一大工业机器人市场的地位。但是,按机器人密度来看,即每万名员工对应的机器人保有量,我国不足30台,远低于全球约为50多台的平均水平。 前瞻产业研究院《2016-2021年中国工业机器人行业产销需求预测与转型升级分析报告》数据显示:2015年我国工业机器人产量为32996台,同比增长21.7%。2016年机器人产业将继续保持快速增长,今年一季度我国工业机器人产量为11497台,同比增长19.9%。此外,数据显示,2015年我国自主品牌工业机器人生产销售达22257台,同比增长31.3%。国产自主品牌得到了一定程度的发展,但与发达国家相比,仍有一定差距。 2016年未来全球工业机器人市场趋势包括:大国政策主导,促使工业与服务机器人市场增长;汽车工业仍为工业机器人主要用户;双臂协力型机器人为工业机器人市场新亮点。 一、什么是工业机器人 工业机器人是一种通过重复编程和自动控制,能够完成制造过程中某些操作任务的多功能、多自由度的机电一体化自动机械装备和系统,它结合制造主机或生产线,可以组成单机或多机自动化系统,在无人参与下,实现搬运、焊接、装配和喷涂等多种生产作业。 当前,工业机器人技术和产业迅速发展,在生产中应用日益广泛,已成为现代制造生产中重要的高度自动化装备。
二、工业机器人的特点 自20世纪60年代初第一代机器人在美国问世以来,工业机器人的研制和应用有了飞速的发展,但工业机器人最显著的特点归纳有以下几个。 1.可编程。生产自动化的进一步发展是柔性自动化。工业机器人可随其工作环境变化的需要而再编程,因此它在小批量多品种具有均衡高效率的柔性制造过程中能发挥很好的功用,是柔性制造系统(FMS)中的一个重要组成部分。 2.拟人化。工业机器人在机械结构上有类似人的行走、腰转、大臂、小臂、手腕、手爪等部分,在控制上有电脑。此外,智能化工业机器人还有许多类似人类的“生物传感器”,如皮肤型接触传感器、力传感器、负载传感器、视觉传感器、声觉传感器、语言功能等。传感器提高了工业机器人对周围环境的自适应能力。 3.通用性。除了专门设计的专用的工业机器人外,一般工业机器人在执行不同的作业任务时具有较好的通用性。比如,更换工业机器人手部末端操作器(手爪、工具等)便可执行不同的作业任务。 4.机电一体化。工业机器人技术涉及的学科相当广泛,但是归纳起来是机械学和微电子学的结合——机电一体化技术。第三代智能机器人不仅具有获取外部环境信息的各种传感器,而且还具有记忆能力、语言理解能力、图像识别能力、推理判断能力等人工智能,这些都和微电子技术的应用,特别是计算机技术的应用密切相关。因此,机器人技术的发展必将带动其他技术的发展,机器人技术的发展和应用水平也可以验证一个国家科学技术和工业技术的发展和水平。 三、工业机器人常见的五大应用领域 1.机械加工应用(2%) 机械加工行业机器人应用量并不高,只占了2%,原因大概也是因为市面上有许多
传感器与测试技术形考作业四
传感器与测试技术形考作业四 责任教师张晓峰 1.超声波在界面上发生波型转换后会产生哪些波型?这些波型要遵循什么规律? 涉及的知识点及答题分析:这个题的考核知识点是超声波的反射、折射及波型转换。 答:当声波传播至两介质的分界面,一部分能重返回原介质,称为反射波;另一部分能量透过介质面,到另一介质内继续传播,称为折射波。 波型要遵循规律: ①反射定律; ②折射定律; ③反射率; ④反射系数; ⑤透过率; ⑥透过系数。 2.常用的超声波探伤方法有哪些?各有什么特点? 涉及的知识点及答题分析:这个题的考核知识点是超声波探伤法。 答:超声波探伤法是利用超声波在物体中传播的一些物理特性来发现物体内部的不连续性,即缺陷或伤的一种方法,是无损检验一种重要手段。常用的超声波探伤法有共振法、穿透法、脉冲反射法等。 共振法是根据声波(频率可调的连续波)在工件中呈共振状态来测量工件厚度或判断有无缺陷的方法。这种方法主要用于表面较光滑的工件的厚度检测,也可用于探测复合材料的粘合质量和钢板内的夹层缺陷检测。振法的特点是 〔1〕可精确的测厚,特别适宜测量薄板及薄壁管; 〔2〕工件表面光洁度要求高,否则不能进行测量。 穿透法又称透射法,穿透法是将二个探头分别置于工件相对的两面,一个发射超声波,使超声波从工件的一个界面透射到另一个界面,在该界面处用另一个探头来接收。 穿透法具有以下特点: (1)探测灵敏度较低,不易发现小缺陷; (2)根据能量的变化即可判断有无缺陷,但不能定位; (3)适宜探测超声波衰减大的材料;
(4)可避免盲区,适宜探测薄板; (5)指示简单,便于自动探伤; (6)对两探头的相对距离和位置要求较高。 脉冲反射法是将脉冲超声波入射至被测工作后,传播到有声阻抗差异的界面上(如缺陷与工件的界面)时,产生反射声波,波在工件的反射状况就会显示在荧光屏上,根据反射的时间及形状来判断工件内部缺陷及材料性质的方法。 脉冲反射法的特点是: (1)探测灵敏度高; (2)能准确地确定缺陷的位置和深度; (3)可用不同波型探测,应用范围广。 3.探头和工件的耦合方式有哪些?简述其工作原理及特点。 涉及的知识点及答题分析:这个题的考核知识点是探头和工件的耦合方式可分直接接触法和液浸法。 为使探头有效地向工件发射超声波和有效地接收超声波,必须使探头和工件探测面之间有良好的声耦合。探头和工件的耦合方式可分直接接触法和液浸法二种。 (1)直接接触法 直接接触法就是在探头和工件之间填一层很薄的耦合济。由于声耦合的好坏直接影响到探伤灵敏度及探伤的准确性,应此必须使探头和工件侧面之间具有良好的声学接触。 (2)液浸法 将探头和工件浸于液体中以液体作耦合剂进行探伤的方法,称为液浸法。耦合剂可以是油,也可以是水。液浸法适用于表面粗糙的试件,探头也不易磨损,耦合稳定,探测结果重复性好,便于实现自动化探伤。液浸法分为全浸没式和局部浸没式。 液浸法与接触法的特点 ①接触法比液浸法简单、灵活,但接触法的波形不稳定(因受手工操作时压力的影响),而液浸法波形稳定; ②液浸法不必将探头与工件直接接触,便于实现自动化探伤; ③液浸法适宜探测表面粗糙的工件,不磨损探头晶片; ④液浸法的声束方向可连续改变,易探测倾斜的缺陷; ⑤液浸法可控制波束,可以用聚焦探头提高灵敏度; ⑥液浸法要求用清洁的液体,否则会降低探测灵敏度。 4.影响测试系统正常工作的干扰有哪些?如何防护? 涉及的知识点及答题分析:这个题的考核知识点是测试过程中的抗干扰技术。 答:影响测试系统正常工作的干扰有及防护: 1)机械干扰,应采取减振措施,一般可设置减振弹簧或减振橡胶; 2)光干扰,可封闭半导体元件在不透光的壳体内,对于光敏感件更应注意对光的屏蔽; 3)温度干扰,高精度测试,安排在恒室温内进行; 4)湿度干扰,采用环境去湿或在测试装置时采取防潮措施。 5)电磁干扰,应尽量提高信嘈比。 5.速度测量方法有哪几种?分别介绍其工作原理。 涉及的知识点及答题分析:这个题的考核知识点是速度测量。 答:详见p259