FANUC机器人原点位置异常处理办法
关于matering的相关报警及处理方法
1.pluse mismatch(A:*;G:*)
出现该报警的原因为脉冲编码器内数据与机器人控制器内数据不一致.
以下为几种可能产生该报警情况:
一)机器人关机后由于外力作用是机器人某些轴移动,开机后该轴会产生该报警.
二)将不是当前机器人的mastering数据文件导入当前机器人中.
三)将机器人机械部分连接到其他控制器上.
四)其它未知原因.
对于第一种情况,即控制器内Mastering数据正确的前题下,更改系统变量
$MCR.$SPC_RESET FLASE----TRUE-----FLASE
$DMR_GRP.$MASTER_DONE FLASE----TRUE
POWER Off/ON
对于后面两只情况,由于控制器内mastering数据改变,需要重新输入正确的mastering数据(可以参照Data Sheet),然后再更改系统变量.
如果没有正确的mastering数据,则需要Zero Position Master来完成.
2.Bzal Alarm(A:*;G:*)
产生此报警的原因为编码器内SRAM数据丢失.
以下为可能产生此报警的情况
一)机器人机械部电池掉电;
二)连接编码器电缆拔出.
处理方法:
进入Master/Cal画面,按下RES_PCA,清除报警.
Power Off/ON
开机后出现pulse not established(A:*;G:*)
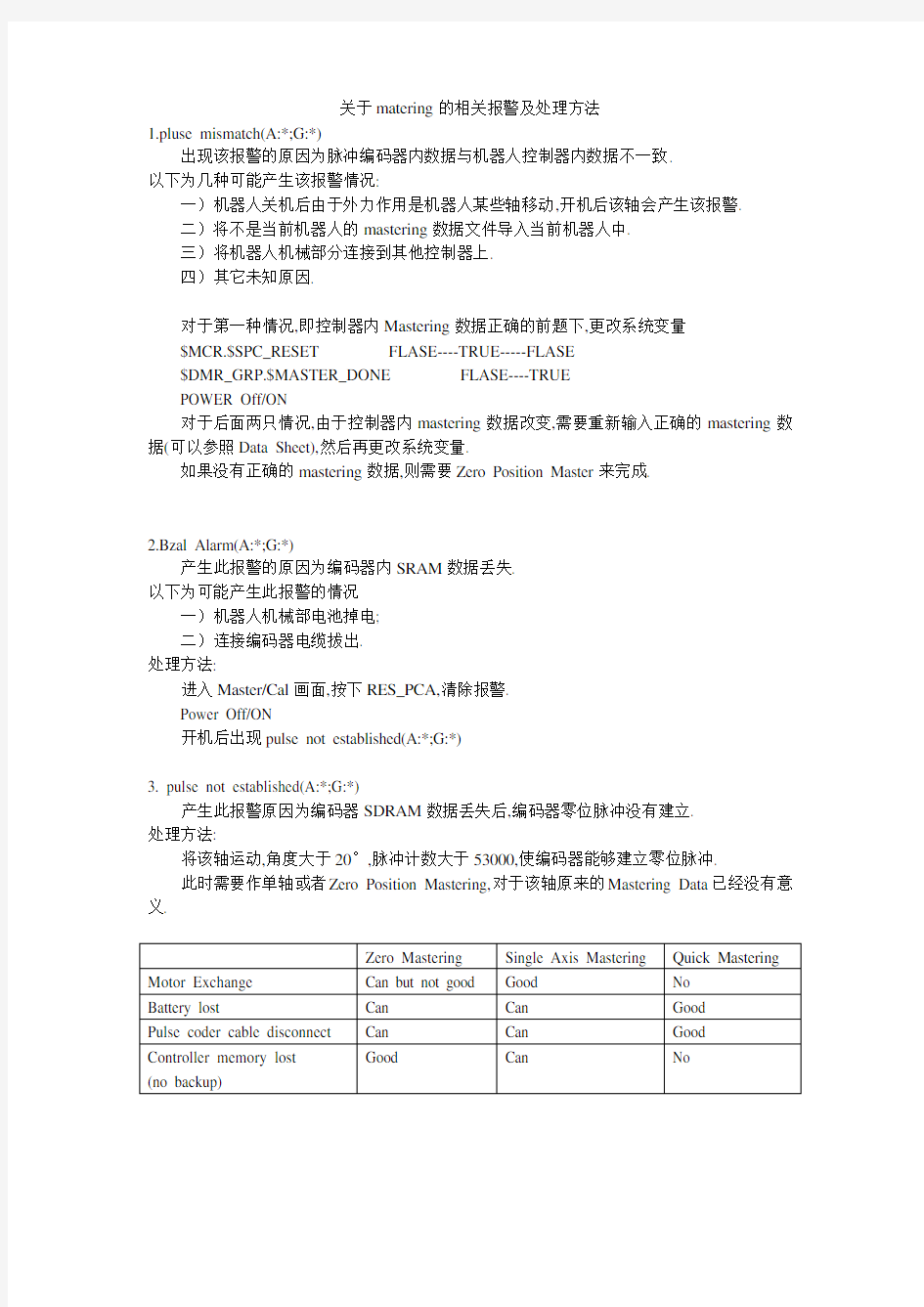
3. pulse not established(A:*;G:*)
产生此报警原因为编码器SDRAM数据丢失后,编码器零位脉冲没有建立.
处理方法:
将该轴运动,角度大于20°,脉冲计数大于53000,使编码器能够建立零位脉冲.
此时需要作单轴或者Zero Position Mastering,对于该轴原来的Mastering Data已经没有意义.
上海发那科FANUC机器人有限公司内部教材
—-可编辑修改,可打印—— 别找了你想要的都有! 精品教育资料——全册教案,,试卷,教学课件,教学设计等一站式服务——
全力满足教学需求,真实规划教学环节最新全面教学资源,打造完美教学模式
上海发那科机器人有限公司
2012.1 目录 认识FANUC机器人 4 1.概论----------------------------------------------------------------------------------------------------------- 4 1)机器人的构成------------------------------------------------------------------------------------------- 4 2)机器人的用途------------------------------------------------------------------------------------------- 4 3)FANUC机器人的型号-------------------------------------------------------------------------------- 4 4)机器人主要参数---------------------------------------------------------------------------------------- 5 5)FANUC机器人的安装环境--------------------------------------------------------------------------- 5 6)FANUC机器人的编程方式--------------------------------------------------------------------------- 5 7)FANUC机器人的特色功能--------------------------------------------------------------------------- 5 2.FANUC机器人的构成--------------------------------------------------------------------------------- 5 1)FANUC机器人软件系统 5 ------------------------------------------------------------------------------- 2)FANUC机器人硬件系统 5 ------------------------------------------------------------------------------- 3.控制器------------------------------------------------------------------------------------------------------- 5 1)认识TP--------------------------------------------------------------------------------------------------- 5 (1)TP的作用--------------------------------------------------------------------------------------------- 5 (2)认识TP上的键----------------------------------------------------------------------------------------7 (3)TP上的开关-------------------------------------------------------------------------------------------8 (4)TP上的指示灯----------------------------------------------------------------------------------------8 (5)TP上的显示屏----------------------------------------------------------------------------------------8 (6)屏幕菜单和功能菜单---------------------------------------------------------------------------------9
FANUC机器人现场培训指南V
上海发那科机器人有限公司
目录 第1章 机器人基本操作 1.1概述 (1) 1.2发那科机器人的构成 (1) 1.3试教TP盒 (3) 1.3.1认识TP上的键 (3) 1.3.2 TP上的开关 (3) 1.3.3 TP的显示屏 (3) 1.4 手动试教机器人 (4) 1.5 生产运行操作注意事项 (4) 1.6操作机器人 (4) 1.6.1 通电关电 (5) 1.6.2手动试教机器人 (5) 1.6.3 手动执行程序 (6) 1.7 坐标系设置 (7) 1.7.1 工具坐标系设置 (7) 1.7.2 设置方法 (7) 1.7.3 六点法设置 (7) 培训试题 (7) 第2章 机器人编程试教 2.1 创建程序 (12) 2.2程序的组成 (13) 2.3 运动类型 (14) 2.4 位置数据类型 (14) 2.5 编辑程序 (14) 2.5.1 试教程序(方法一) (14) 2.5.2 试教程序(方法二) (15) 2.6 修正点 (16) 2.6.1 修正点(方法一) (16) 2.6.2 修正点(方法二) (16) 2.6.3 程序显示介绍 (17) 2.7选择程序并执行程序 (18) 2.8 删除程序 (19) 2.9复制程序 (20) 2.10 查看程序属性 (21) 2.11 终止类型 (21) 2.11.1 分类及定义 (22) 2.11.2 作用及注意事项 (22) 2.12 非运动指令 (23)
2.12.1 I/O指令 (23) 2.12.2 呼叫指令(CALL) (24) 2.12.3 等待指令(WAIT) (25) 培训试题 (25) 第3章 备份还原 3.1 使用设备 (26) 3.2 文件类型 (26) 3.3 一般文件备份 (27) 3.4一般备份还原 (29) 3.5 镜像备份 (30) 3.6 镜像还原 (32) 培训试题 (32) 第4章 电气部分 4.1 I/O分类 (36) 4.1.1 通用I/O (36) 4.1.2 特殊I/O (36) 4.2 I/O分配 (36) 4.2.1 信号分配步骤 (36) 4.2.2 I/O板卡介绍 (37) 4.2.3 软硬件端口对应(B柜体) (38) 4.2.2 软硬件端口对应(Mate柜体) (39) 4.3 使用外部信号启动程序 (39) 4.3.1 自动启动的方法 (40) 4.3.2 自动运行程序的条件 (40) 4.3.3 RSR启动 (40) 4.3.4 PNS启动 (43) 4.3.5 Ref Position (44) 4.4 安全回路的连接 (46) 4.4.1 安全回路端子台介绍(B柜体) (46) 4.4.2 安全回路接线图(B柜体) (46) 4.4.3 急停输出回路(B柜体) (47) 4.4.4安全回路开关(Mate柜 ) (48) 4.4.5急停输出电路图(Mate 柜体) (48) 培训试题 (48) 第5章 故障消除 5.1 SRVO-062报警消除 (51) 5.2 SRVO-075报警消除 (51) 5.3 SRVO-038报警消除 (51)
发那科机器人培训入门
上海发那科机器人有限公司 2012.05.28
目录 认识FANUC机器人 4 1.概论----------------------------------------------------------------------------------------------------------- 4 1)机器人的构成------------------------------------------------------------------------------------------- 4 2)机器人的用途------------------------------------------------------------------------------------------- 4 3)FANUC机器人的型号-------------------------------------------------------------------------------- 4 4)机器人主要参数---------------------------------------------------------------------------------------- 5 5)FANUC机器人的安装环境--------------------------------------------------------------------------- 5 6)FANUC机器人的编程方式--------------------------------------------------------------------------- 5 7)FANUC机器人的特色功能--------------------------------------------------------------------------- 5 2.FANUC机器人的构成--------------------------------------------------------------------------------- 5 1)FANUC机器人软件系统------------------------------------------------------------------------------- 5 2)FANUC机器人硬件系统------------------------------------------------------------------------------- 5 3.控制器------------------------------------------------------------------------------------------------------- 5 1)认识TP--------------------------------------------------------------------------------------------------- 5 (1)TP的作用--------------------------------------------------------------------------------------------- 5 (2)认识TP上的键----------------------------------------------------------------------------------------7 (3)TP上的开关-------------------------------------------------------------------------------------------8 (4)TP上的指示灯----------------------------------------------------------------------------------------8 (5)TP上的显示屏----------------------------------------------------------------------------------------8 (6)屏幕菜单和功能菜单---------------------------------------------------------------------------------9 2)操作者面板----------------------------------------------------------------------------------------------- 11 3)远端控制器----------------------------------------------------------------------------------------------- 11 4)显示器和键盘-------------------------------------------------------------------------------------------- 12 5)通讯-------------------------------------------------------------------------------------------------------- 12 6)输入/输出 I/O-------------------------------------------------------------------------------------------- 12 7)外部I/O---------------------------------------------------------------------------------------------------- 12 8)机器人的运动-------------------------------------------------------------------------------------------- 12 9)急停设备-------------------------------------------------------------------------------------------------- 12 10)附加轴--------------------------------------------------------------------------------------------------- 12 安全13 1.注意事项----------------------------------------------------------------------------------------------------13 2.以下场合不可使用机器人----------------------------------------------------------------------------13 3.安全操作规程---------------------------------------------------------------------------------------------13 编程14 1.有效编程的技巧-----------------------------------------------------------------------------------------14 1)运动指令-------------------------------------------------------------------------------------------------- 14 2)设置HOME点------------------------------------------------------------------------------------------- 14 2.通电和关电------------------------------------------------------------------------------------------------15 1)通电-------------------------------------------------------------------------------------------------------- 15 2)关电-------------------------------------------------------------------------------------------------------- 15 3.手动示教机器人-----------------------------------------------------------------------------------------15 1)示教模式-------------------------------------------------------------------------------------------------- 15 2)设置示教速度-------------------------------------------------------------------------------------------- 16 3)示教-------------------------------------------------------------------------------------------------------- 16
FANUC机器人仿真软件操作手册范本
2008年10月第1版 . . ROBOGUIDE 使用手册(弧焊部分基础篇)
目录 目录 (1) 第一章概述 (2) 1.1. 软件安装 (2) 1.2. 软件注册 (3) 1.3. 新建Workcell的步骤 (4) 1.3.1. 新建 (4) 1.3.2. 添加附加轴的设置 (9) 1.4. 添加焊枪,TCP设置。 (15) 1.5. Workcell的存储目录 (18) 1.6.鼠标操作 (19) 第二章创建变位机 (21) 3.1.利用自建数模创建 (21) 3.1.1.快速简易方法 (21) 3.1.2.导入外部模型方法 (31) 3.2.利用模型库创建 (41) 3.2.1.导入默认配置的模型库变位机 (41) 3.2.2.手动装配模型库变位机 (44) 第三章创建机器人行走轴 (49) 3.1. 行走轴-利用模型库 (49) 3.2. 行走轴-自建数模 (56) 第四章变位机协调功能 (62) 4.1. 单轴变位机协调功能设置 (62) 4.2. 单轴变位机协调功能示例 (71) 第五章添加其他外围设备 (72) 第六章仿真录像的制作 (75)
第一章概述 1.1. 软件安装 本教程中所用软件版本号为V6.407269 正确安装 ROBOGUIDE ,先安装安装盘里的SimPRO,选择需要的虚拟机器人的软件版本。安装完 SimPRO后再安装WeldPro。安装完,会要求注册;若未注册,有30天时间试用。 如果需要用到变位机协调功能,还需要安装MultiRobot Arc Package。 1.2. 软件注册
注册方法:打开WeldPRO程序,点击Help / Register WeldPRO 弹出如下窗口, 1.3. 新建Workcell的步骤 1.3.1. 新建
上海发那科(FANUC)机器人有限公司管理系统内部教材
实用文档 发那科机器人 2012.1
目录 认识FANUC机器人 4 1.概论----------------------------------------------------------------------------------------------------------- 4 1)机器人的构成------------------------------------------------------------------------------------------- 4 2)机器人的用途------------------------------------------------------------------------------------------- 4 3)FANUC机器人的型号-------------------------------------------------------------------------------- 4 4)机器人主要参数---------------------------------------------------------------------------------------- 5 5)FANUC机器人的安装环境--------------------------------------------------------------------------- 5 6)FANUC机器人的编程方式--------------------------------------------------------------------------- 5 7)FANUC机器人的特色功能--------------------------------------------------------------------------- 5 2.FANUC机器人的构成--------------------------------------------------------------------------------- 5 1)FANUC机器人软件系统 5 ------------------------------------------------------------------------------- 2)FANUC机器人硬件系统 5 ------------------------------------------------------------------------------- 3.控制器------------------------------------------------------------------------------------------------------- 5 1)认识TP--------------------------------------------------------------------------------------------------- 5 (1)TP的作用--------------------------------------------------------------------------------------------- 5 (2)认识TP上的键----------------------------------------------------------------------------------------7 (3)TP上的开关-------------------------------------------------------------------------------------------8 (4)TP上的指示灯----------------------------------------------------------------------------------------8 (5)TP上的显示屏----------------------------------------------------------------------------------------8 (6)屏幕菜单和功能菜单---------------------------------------------------------------------------------9 2)操作者面板----------------------------------------------------------------------------------------------- 11 3)远端控制器----------------------------------------------------------------------------------------------- 11 4)显示器和键盘-------------------------------------------------------------------------------------------- 12 5)通讯-------------------------------------------------------------------------------------------------------- 12 6)输入/输出I/O-------------------------------------------------------------------------------------------- 12 7)外部I/O---------------------------------------------------------------------------------------------------- 12 8)机器人的运动-------------------------------------------------------------------------------------------- 12 9)急停设备-------------------------------------------------------------------------------------------------- 12 10)附加轴--------------------------------------------------------------------------------------------------- 12 安全13 1.注意事项----------------------------------------------------------------------------------------------------13 2.以下场合不可使用机器人----------------------------------------------------------------------------13 3.安全操作规程---------------------------------------------------------------------------------------------13 编程14 1.有效编程的技巧-----------------------------------------------------------------------------------------14 1)运动指令-------------------------------------------------------------------------------------------------- 14
上海发那科(FANUC)机器人有限公司内部教材
上海发那科(F A N U C)机器人有限公司内部 教材
上海发那科机器人有限公司 2012.1 目录 认识FANUC机器人 4 1.概论----------------------------------------------------------------------------------------------------------- 4 精心整理,用心做精品0
1)机器人的构成------------------------------------------------------------------------------------------- 4 2)机器人的用途------------------------------------------------------------------------------------------- 4 3)FANUC机器人的型号-------------------------------------------------------------------------------- 4 4)机器人主要参数---------------------------------------------------------------------------------------- 5 5)FANUC机器人的安装环境-------------------------------------------------------------------------- 5 - 6)FANUC机器人的编程方式-------------------------------------------------------------------------- 5 - 7)FANUC机器人的特色功能-------------------------------------------------------------------------- 5 - 2.FANUC机器人的构成--------------------------------------------------------------------------------- 5 1)FANUC机器人软件系统----------------------------------------------------------------------------- 5 -- 2)FANUC机器人硬件系统----------------------------------------------------------------------------- 5 -- 3.控制器------------------------------------------------------------------------------------------------------- 5 1)认识TP-------------------------------------------------------------------------------------------------- 5 - (1)TP的作用-------------------------------------------------------------------------------------------- 5 - (2)认识TP上的键-------------------------------------------------------------------------------------- 7 -- (3)TP上的开关------------------------------------------------------------------------------------------ 8 - (4)TP上的指示灯--------------------------------------------------------------------------------------- 8 - (5)TP上的显示屏--------------------------------------------------------------------------------------- 8 - (6)屏幕菜单和功能菜单-------------------------------------------------------------------------------- 9 - 2)操作者面板---------------------------------------------------------------------------------------------- 11 - 3)远端控制器---------------------------------------------------------------------------------------------- 11 - 4)显示器和键盘-------------------------------------------------------------------------------------------- 12 5)通讯-------------------------------------------------------------------------------------------------------- 12 6)输入/输出 I/O-------------------------------------------------------------------------------------------- 12 7)外部I/O--------------------------------------------------------------------------------------------------- 12 - 8)机器人的运动-------------------------------------------------------------------------------------------- 12 9)急停设备-------------------------------------------------------------------------------------------------- 12 10)附加轴--------------------------------------------------------------------------------------------------- 12 安全13 1.注意事项----------------------------------------------------------------------------------------------------13 2.以下场合不可使用机器人----------------------------------------------------------------------------13 3.安全操作规程---------------------------------------------------------------------------------------------13 编程14 1.有效编程的技巧-----------------------------------------------------------------------------------------14 精心整理,用心做精品1