串级控制实验报告
过程控制工程实验报告
实验名称:串级控制系统
班级:
组员:
思考题
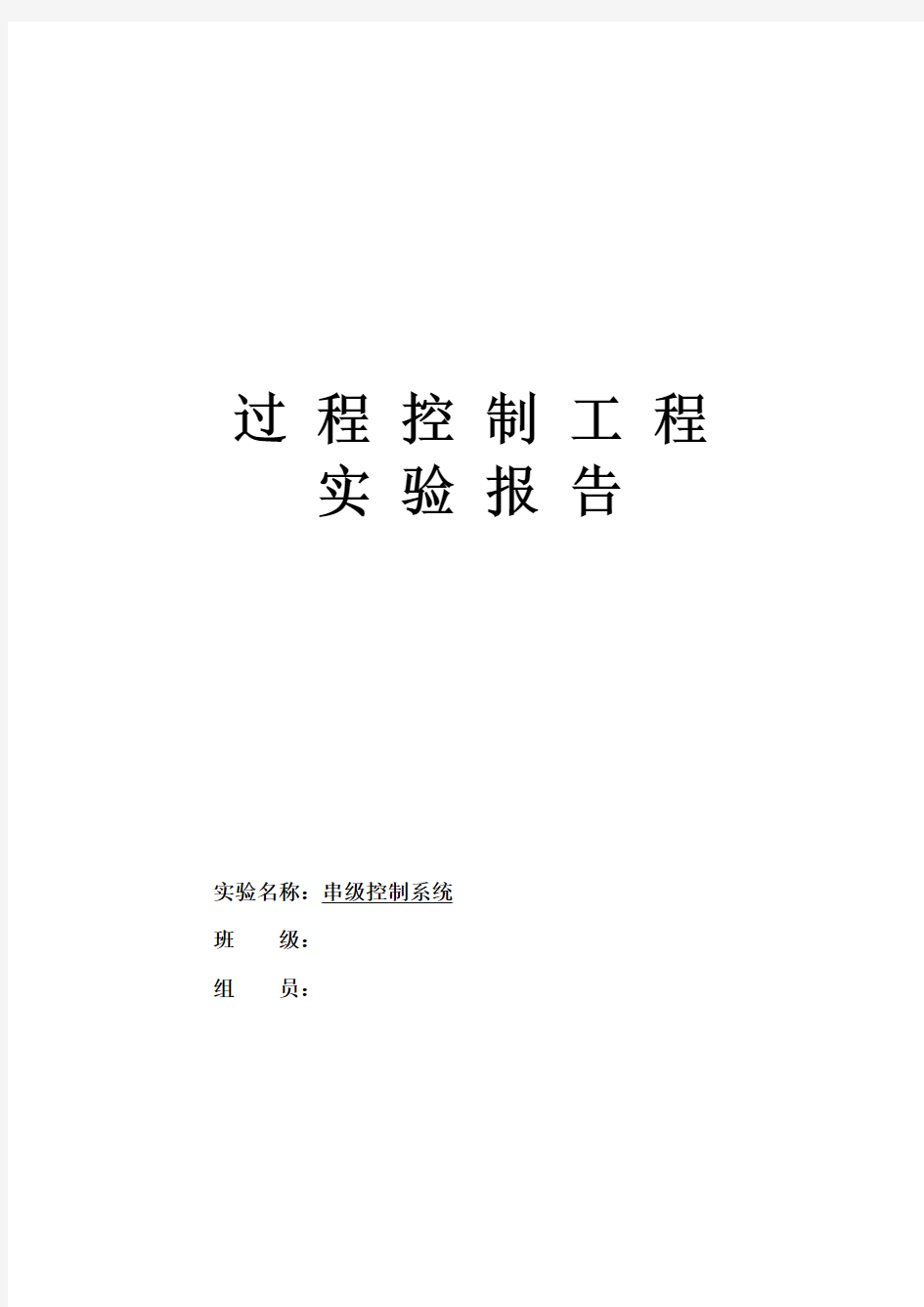
1. 若控制阀为气闭式,试分析液位-液位串级系统中主、副控制器的正、反作用应如何选?
主控制器选反作用, 副控制器选正作用
分析:在串级控制系统中主副控制器正、反作用的选择遵循先副后主的原则; 副回路确定与单回路相同,即各环节放大倍数乘积为负,控制阀为气闭阀即为负,变送器和水箱液位都为正,故副控制器应为正作用; 主回路中,把负回路等效为一正环节,因为液位变送器和水箱液位都为正,故主控制器应为负作用。
2. 如何才能保证串级控制系统的无扰动切换?
先副后主:调节主控制器的输出,使其等于副回路的测量值,这时副回路的偏差为0,则副控制器的自动电流将跟踪等于手动电流,于是可将副控制器切入自动; 当副环切入自动控制稳定,主变量接近或等于设定值时,调整主控制器器的设定值,使主控制器偏差为0,此时主控制器的自动输出电流跟踪等于手动输出电流,于是可将主控制器切入自动。
3.串级系统投运整定前需要做好哪几项工作?
①检查管路、阀门(闸板的高度),设备加电;进行控制系统信号连线,构建一个有主参数、副参数,主控制器、副控制器和控制阀的完整串级控制系统。②启动实验软件,置主、副控制器皆为手动状态;先调整副控制器的手动输出为50-60%,开启副回路动力装置;待系统达到平稳,各控制量处于中间合适位置即可。③控制系统投自动前,务必要确认控制系统闭环后一定是负反馈的,即控制作用是消弱而不是增强干扰作用的影响。根据调节回路中各环节作用关系、控制阀的开闭方向来判定、确定主、副控制器的正、反作用。
4.一步整定法的依据是什么?
依据:在串级控制系统中一般来说,主变量时工艺的主要操作指标,直接关系产品的质量,因此对它要求比较严格。而副的设立主要是为了提高主变量的控制质量,对副变量本身没有很高的要求,允许它在一定范围内变化,因此在整定时不必将过多的精力放在副环上,只要主变量达到规定的质量指标要求即可。此外对于一个具体的出串级控制系统来说,在一
Z2 (s)
Z1 (s)
定范围内主、副控制器的放大倍数是可以互相匹配的,只要主、副控制器的放大倍数及Kc1与Kc2的乘积等于Ks (Ks 为主变量呈4:1衰减震荡时的控制比例放大系数),系统就能产生4:1衰减过程。虽然按照经验一次放上的副控制器参数不一定合适,但是可通过调整主控制器的放大倍数进行补偿,结果仍然可使主变量呈4:1衰减。
5.分析对比中水箱中闸板放下时串级系统的控制质量有何不同,为什么?
此串级系统将失去控制作用
中水箱闸板放下后,中水箱将不能为下水箱提供水,即Y2(s )到Go1(s )的通道被切断,然后下水箱的液位持续下降,即Gm1减小,偏差Z1(s )为负偏差,主控制器为反作用,故输出增大,中水箱液位升高,即Gm2(s )增大,偏差z2(s )增加还是减小不确定,且中水箱和下水箱通路切断,故失去控制作用。
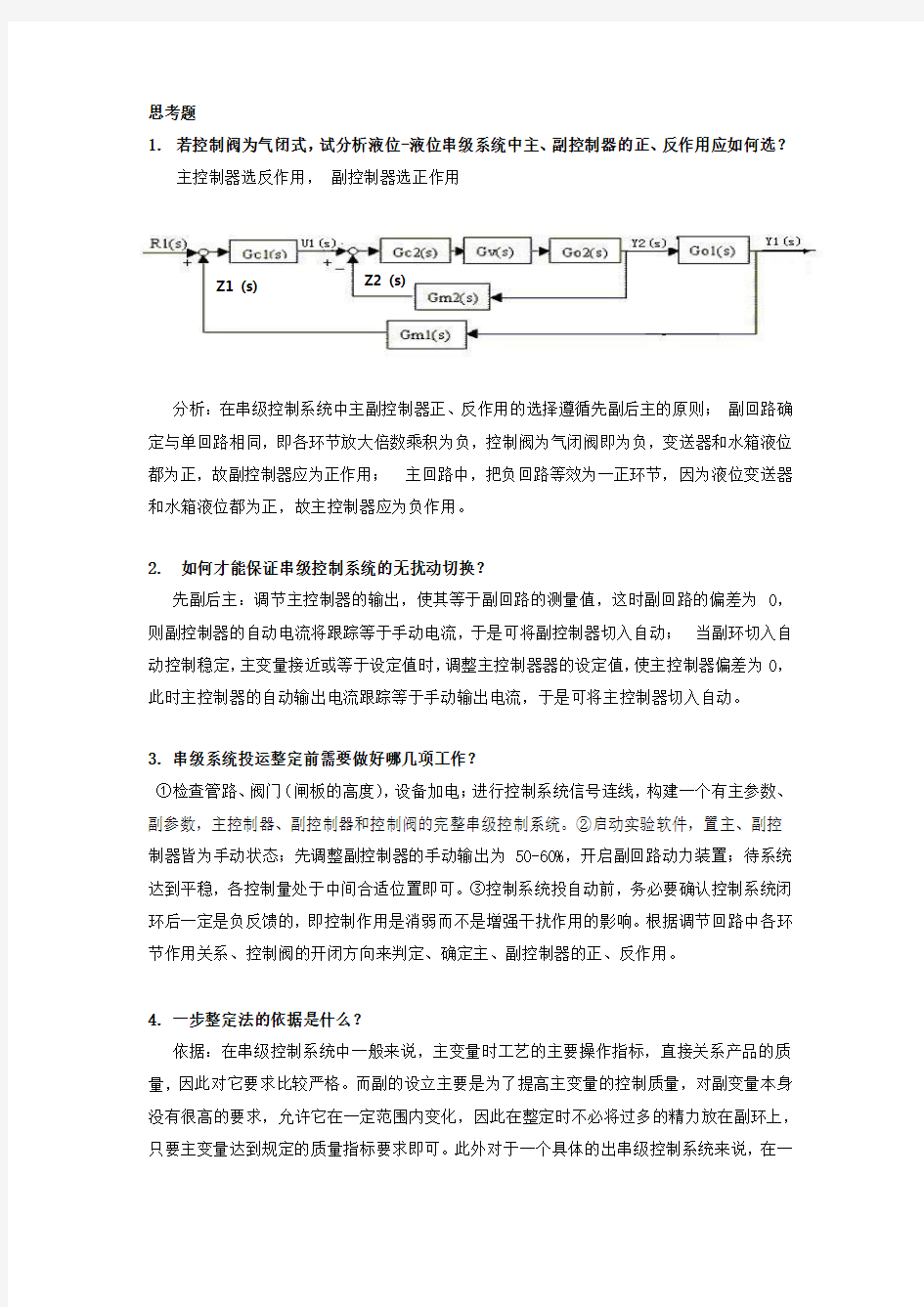
实验过程曲线图:
100200300
400500600700
51015202530
35404550t/3s
%
P = 17,I = 100
Z2 (s)
Z1 (s)
浙江大学机械电子控制工程研究所硕士开题报告模板
分类号: (按中国图书分类法,学位办网上可查) 单位代码: 10335 密级:(注明密级与保密期限)学号: 硕士学位论文开题报告 中文论文题目:(小二号仿宋体加黑) 英文论文题目:(16pt Time New Roman,Bold) (英文题目规范“Determination of Force and Linearized Parameters of Radial Active Magnetic Bearings by Finite Element Technique”,首字母大写,介词、连词等小写) 研究生姓名: 指导教师: 合作导师: 专业名称: 研究方向: 所在院系: 提交日期 学位论文开提报告封面格式(适用全日制研究生) 仅限于论文课题来源于国防军工项
目录(黑体、二号) 1.选题意义(宋体、四号) 1.1.国内外相关研究进展(黑体、五号) 1.1.1…………(宋体,五号) 1.2.研究背景及意义(黑体、五号) 2.研究内容及方案(包括可行性分析)(宋体、四号) 2.1.研究内容(黑体、五号) 2.1.1………… (宋体,五号) 2.2.研究方案(黑体、五号) 2.2.1…………(宋体,五号) 2.3.可行性分析(黑体,五号) 3.课题研究初步进展(宋体、四号) 4.1…………(黑体、五号) 4.2…………(黑体、五号) 4.课题进度安排(宋体、四号) 5.1…………(黑体、五号) 5.2…………(黑体、五号) 5.课题预期成果(宋体、四号) 5.1课题研究特色(黑体、五号) 5.2预期研究成果(黑体、五号) 6.参考文献(宋体、四号)
正文 1.选题意义(宋体、四号) 1.1.国内外相关研究进展(黑体、五号) ………… 注:*为检测样本值(六号宋体) 图1 典型BP 网络示意图(小五宋体) …………………… 1
实验四 串级控制系统
实验四 加热炉温度串级控制系统 (实验地点:程控实验室,崇实楼407) 一、实验目的 1、熟悉串级控制系统的结构与特点。 2、掌握串级控制系统临界比例度参数整定方法。 3、研究一次、二次阶跃扰动对系统被控量的影响。 二、实验设备 1、MATLAB 软件, 2、PC 机 三、实验原理 工业加热炉温度串级控制系统如图4-1所示,以加热炉出口温度为主控参数,以炉膛温度为副参数构成串级控制系统。 图4-1 加热炉温度串级控制系统工艺流程图 图4-1中,主、副对象,即加热炉出口温度和炉膛温度特性传递函数分别为 主对象:;)130)(130()(18001++=-s s e s G s 副对象:2 1802)1)(110()(++=-s s e s G s 主控制器的传递函数为PI 或PID ,副控制器的传递函数为P 。对PI 控制器有 221111)(),/(, 1 11)(c c I c I I c I c c K s G T K K s K K s T K s G ==+=???? ? ?+= 采用串级控制设计主、副PID 控制器参数,并给出整定后系统的阶跃响应曲线和阶跃扰动响应曲线,说明不同控制方案控制效果的区别。 四、实验过程 串级控制系统的设计需要反复调整调节器参数进行实验,利用MATLAB 中的Simulink 进行仿真,可以方便、快捷地确定出调节器的参数。 1.建立加热炉温度串级控制系统的Simulink 模型 (图4-2) 在MATLAB 环境中建立Simulink 模型如下:)(01s G 为主被控对象,)(02s G 为副被控对象,Step 为系统的输入,c 为系统的输出,q1为一次阶跃扰动,q2为二次阶跃扰动,可以用示波器观察输出波形。PID1为主控制器,双击PID 控制器可设置参数:(PID 模块在
串级控制系统研究 仿真
本科学生毕业论文 2011年5月20日 论文题目: 串级控制系统研究学院: 电子工程学院年级: 2007级专业: 自动化姓名: 陈曦学号: 20075199指导教师: 赵建华
摘要 随着现代工业生产过程向着大型、连续和强化方向发展,对控制系统的控制品质提出了日益增长的要求。在这种情况下,简单的单回路控制已经难以满足一些复杂的控制要求。串级控制系统是过程控制中的一种多回路控制系统,是为了提高单回路控制系统的控制效果而提出来的一种控制方案。串级控制系统把两个单回路控制系统以一定的结构形式串联在一起,它不仅具有单回路控制系统的全部功能,而且还具有许多单回路控制系统所没有的优点。串级控制系统采用了两个调节器,因此它的调节器的参数整定更复杂一些。 本论文论述了一个液位——流量串级控制系统的设计方法和步骤,介绍了它的参数整定方法。在此过程中,介绍了对液位和流量进行检测和转换的常用元件,应用阶跃响应曲线推导了广义对象的传递函数,简单地论述了串级控制系统的优点,讨论了它对控制效果的改善作用,并使用仿真软件对该系统进行了仿真。 关键词 串级控制系统;液位;流量;仿真
Abstract Along with the modern industry production process to large-scale,continuously is developing with the strengthened direction,proposed to the control system control quality day by day grows request.In this kind of situation,the simple single return route control already with difficulty satisfied some complex control requests.The cascade control system is in the process control more than one kind of return routes control system,is for enhance one kind of control plan which the single return route control system the control effect proposes.The cascade control system two single return routes control system by the certain structural style connects in together,it not only has the single return route control system the complete function,moreover also has many single return routes control system no merit.The cascade control system has used two regulators,therefore it is more complex to set its regulator parameter. The present paper elaborated a fluid position—current capacity cascade control system design method and the step,introduced its parameter set method.In this process,introduced carries on the examination and the transformation commonly used part to the fluid position and the current capacity,has inferred the generalized object transfer function using the step leap response curve,simply elaborated the cascade control system merit,discussed it to control the effect the improvement function,and use simulation software has carried on the simulation to this system. Key words Cascade control system;fluid position;current capacity;simulation
过程控制系统课程设计报告报告实验报告
成都理工大学工程技术学院《过程控制系统课程设计实验报告》 名称:单容水箱液位过程控制 班级:2011级自动化过程控制方向 姓名: 学号:
目录 前言 一.过程控制概述 (2) 二.THJ-2型高级过程控制实验装置 (3) 三.系统组成与工作原理 (5) (一)外部组成 (5) (二)输入模块ICP-7033和ICP-7024模块 (5) (三)其它模块和功能 (8) 四.调试过程 (9) (一)P调节 (9) (二)PI调节 (10) (三)PID调节 (11) 五.心得体会 (13)
前言 现代高等教育对高校大学生的实际动手能力、创新能力以及专业技能等方面提出了很高的要求,工程实训中心的建设应紧紧围绕这一思想进行。 首先工程实训首先应面向学生主体群,建设一个有较宽适应面的基础训练基地。通过对基础训练设施的 集中投入,面向全校相关专业,形成一定的规模优势,建立科学规范的训练和管理方法,使训练对象获得机械、 电子基本生产过程和生产工艺的认识,并具备一定的实践动手能力。 其次,工程实训的内容应一定程度地体现技术发展的时代特征。为了适应现代化工业技术综合性和多学科交叉的特点,工程实训的内容应充分体现机与电结合、技术与非技术因素结合,贯穿计算机技术应用,以适应科学技术高速发展的要求。应以一定的专项投入,建设多层次的综合训练基地,使不同的训练对象在获得对现代工业生产方式认识的同时,熟悉综合技术内容,初步建立起“大工程”的意识,受到工业工程和环境保护方面的训练,并具备一定的实用技能。 第三,以创新训练计划为主线,依靠必要的软硬件环境,建设创新教育基地。以产品的设计、制造、控制乃至管理为载体,把对学生的创新意识和创新能力的培养,贯穿于问题的观测和判断、创造和评价、建模和设计、仿真和建造的整个过程中。
开题报告(简易多功能信号发生器)
枣庄学院 本科生毕业设计(论文) 开题报告 (20**届) 简易多功能信号发生器的电路设计 姓名:*** 学号:20080613**** 专业:过程装备与控制工程 班级:2008级本科(*)班 学院:机电工程学院 指导老师:** 20**年2月25日
一、研究的目的与意义 信号发生器作为科学实验必不可少的装置,被广泛地应用到教学、科研等各个领域。高等学校特别是理工科的教学、科研需要大量的仪器设备,例如信号源、示波器等,常用仪器都必须配置多套,但是有些仪器设备价格昂贵,如果按照传统模式新建或者改造实验室投资巨大,造成许多学校仪器设备缺乏或过时陈旧,严重影响教学科研。如果运用虚拟仪器技术构建系统,代替常规仪器、仪表,不但可以满足实验教学的需要、节约大量的经费、降低实验室建设的成本,而且能够提高教学科研的质量与效率。目前我国经济开始进入一个新的发展时期,经济的快速发展将加快企业的技术改造步伐,各行业特别是电子、通信行业对先进任意波发生器的需求更加强劲。高档台式仪器加工工艺复杂,对制造水平要求高,生产突破有困难,而采用虚拟技术后,就可通过只采购适合自己应用情况的通用仪器硬件,依靠虚拟仪器软件开发平台,设计出所需的高性能价格比的仪器系统。虚拟仪器是在以通用计算机为核心的硬件平台上,由用户自己设计定义,具有虚拟面板,测试功能由测试软件实现的一种计算机仪器系统。虚拟仪器是以计算机为基础,配以相应测试功能的硬件作为信号输入输出的接口,利用虚拟仪器软件开发平台在计算机的屏幕上虚拟出仪器的面板,人们通过鼠标或键盘操作虚拟仪器面板上的旋钮、开关和按键,去选用仪器功能,设置各种工作参数,启动或停止一台仪器的工作。它能够实现普通仪器的全部功能,如示波器、逻辑分析仪、信号发生器、频谱分析仪等,也能够实现一些在普通仪器上无法实现的功能。这种方式不但让用户享用到通用 PC 机不断升级的性能,还可体会到完全自定义的测量系统功能的灵活性,最终构建起满足特定需求的系统。虚拟仪器是测试技术与计算机深层次结合的产物,其实质是利用最新的计算机技术来实现和扩展传统仪器的功能。虚拟仪器应用软件是整个系统的关键。因此,从某种意义上可以说:软件就是仪器。与传统的仪器相比,虚拟仪器更通用、更灵活、更经济,而且更能适应当代科学技术对测量仪器不断提出的更新、扩展功能和性能的要求。 二、国内外的研究状况 波形发生器亦称函数发生器,作为实验用信号源,是现今各种电子电路实验设计应用中必不可少的仪器设备之一。目前,市场上常见的波形发生器多为纯硬件的搭接而成,且波形种类有限,多为锯齿、正弦、方波、三角等波形。信号发生器作为一种常见的应用电子仪器设备,传统的可以完全由硬件电路搭接而成,如采用 555 振荡电路发生正弦波、三角波和方波的电路便是可取的路径之一,不用依靠单片机。但是这种电路存在波形质量差,控制难,可调范围小,电路复杂和体积大等缺点。在科学研究和生产实践中,如工业过程控制,生物医学,地震模拟机械振动等领域常常要用到低频信号源。而由硬件电路构成的低频信号其性能难以令人满意,而且由于低频信号源所需的 RC 很大;大电阻,大电容在制作上有困难,参数的精度亦难以保证;体积大,漏电,损耗显著更是其致命的弱点。一旦工作需求功能有增加,则电路复杂程度会大大增加。 波形发生器是能够产生大量的标准信号和用户定义信号,并保证高精度、高稳定性、可重复性和易操作性的电子仪器。函数波形发生器具有连续的相位变换、和频率稳定性等优点,不仅可以模拟各种复杂信号,还可对频率、幅值、相移、波形进行动态、及时的控制,并能够与其它仪器进行通讯,组成自动测试系统,因此被广泛用于自动控制系统、震动激励、通讯和仪器仪表领域。 在 70 年代前,信号发生器主要有两类:正弦波和脉冲波,而函数发生器介于两类之间,能够提供正弦波、余弦波、方波、三角波、上弦波等几种常用标准波形,产生其它波形时,
什么叫串级控制系统
1.什么叫串级控制系统?画出一般串级控制系统的典型方块图。 答:串级控制系统是由其结构上的特征而得名的。它是由主、副两个控制器串接工作的。 主控制器的输出作为副控制器的给定值,副控制器的输出去操纵控制阀,以实现对变量的定值控制。 2.串级控制系统有哪些特点?主要使用在哪些场合? 答串级控制系统的主要特点为: (1)在系统结构上,它是由两个串接工作的控制器构成的双闭环控制系统; (2)系统的目的在于通过设置副变量来提高对主变量的控制质量} (3)由于副回路的存在,对进入副回路的干扰有超前控制的作用,因而减少了干扰对主变量的影响; (4)系统对负荷改变时有一定的自适应能力。 串级控制系统主要应用于:对象的滞后和时间常数很大、干扰作用强而频繁、负荷变化大、对控制质量要求较高的场合。 3.串级控制系统中主、剧变量应如何选择? 答主变量的选择原则与简单控制系统中被控变量的选择原则是一样的。 副变量的选择原则是:. (1)主、副变量间应有一定的内在联系,副变量的变化应在很大程度上能影响主变量的变化; (2)通过对副变量的选择,使所构成的副回路能包含系统的主要干扰; (3)在可能的情况下,应使副回路包含更多的主要干扰,但副变量又不能离主变量太近; (4)副变量的选择应考虑到主、副对象时间常数的匹配,以防“共振”的发生 4.为什么说串级控制系统中的主回路是定值控制系统,而副回路是随动控制系统? 答串级控制系统的目的是为了更好地稳定主变量,使之等于给定值,而主变量就是主回路的输出,所以说主回路是定值控制系统。副回路的输出是副变量,副回路的给定值是主控制器的输出,所以在串级控制系统中,副变量不是要求不变的,而是要求随主控制器的输出变化而变化,因此是一个随动控制系统。 5.怎样选择串级控制系统中主、副控制器的控制规律?
过程控制系统仿真实验指导
过程控制系统Matlab/Simulink 仿真实验 实验一 过程控制系统建模 ............................................................................................................. 1 实验二 PID 控制 ............................................................................................................................. 2 实验三 串级控制 ............................................................................................................................. 6 实验四 比值控制 ........................................................................................................................... 13 实验五 解耦控制系统 . (19) 实验一 过程控制系统建模 指导内容:(略) 作业题目一: 常见的工业过程动态特性的类型有哪几种?通常的模型都有哪些?在Simulink 中建立相应模型,并求单位阶跃响应曲线。 作业题目二: 某二阶系统的模型为2 () 22 2n G s s s n n ?ζ??= ++,二阶系统的性能主要取决于ζ,n ?两个参数。试利用Simulink 仿真两个参数的变化对二阶系统输出响应的影响,加深对二阶 系统的理解,分别进行下列仿真: (1)2n ?=不变时,ζ分别为0.1, 0.8, 1.0, 2.0时的单位阶跃响应曲线; (2)0.8ζ=不变时,n ?分别为2, 5, 8, 10时的单位阶跃响应曲线。
过程控制系统实验报告
实验一过程控制系统的组成认识实验 过程控制及检测装置硬件结构组成认识,控制方案的组成及控制系统连接 一、过程控制实验装置简介 过程控制是指自动控制系统中被控量为温度、压力、流量、液位等变量在工业生产过程中的自动化控制。本系统设计本着培养工程化、参数化、现代化、开放性、综合性人才为出发点。实验对象采用当今工业现场常用的对象,如水箱、锅炉等。仪表采用具有人工智能算法及通讯接口的智能调节仪,上位机监控软件采用MCGS工控组态软件。对象系统还留有扩展连接口,扩展信号接口便于控制系统二次开发,如PLC控制、DCS控制开发等。学生通过对该系统的了解和使用,进入企业后能很快地适应环境并进入角色。同时该系统也为教师和研究生提供一个高水平的学习和研究开发的平台。 二、过程控制实验装置组成 本实验装置由过程控制实验对象、智能仪表控制台及上位机PC三部分组成。 1、被控对象 由上、下二个有机玻璃水箱和不锈钢储水箱串接,4.5千瓦电加热锅炉(由不锈钢锅炉内胆加温筒和封闭外循环不锈钢锅炉夹套构成),压力容器组成。 水箱:包括上、下水箱和储水箱。上、下水箱采用透明长方体有机玻璃,坚实耐用,透明度高,有利于学生直接观察液位的变化和记录结果。水箱结构新颖,内有三个槽,分别是缓冲槽、工作槽、出水槽,还设有溢流口。二个水箱可以组成一阶、二阶单回路液位控制实验和双闭环液位定值控制等实验。 模拟锅炉:锅炉采用不锈钢精致而成,由两层组成:加热层(内胆)和冷却层(夹套)。做温度定值实验时,可用冷却循环水帮助散热。加热层和冷却层都有温度传感器检测其温度,可做温度串级控制、前馈-反馈控制、比值控制、解耦控制等实验。 压力容器:采用不锈钢做成,一大一小两个连通的容器,可以组成一阶、二阶单回路压力控制实验和双闭环串级定值控制等实验。 管道:整个系统管道采用不锈钢管连接而成,彻底避免了管道生锈的可能性。为了提高实验装置的使用年限,储水箱换水可用箱底的出水阀进行。 2、检测装置 (液位)差压变送器:检测上、下二个水箱的液位。其型号:FB0803BAEIR,测量范围:0~1.6KPa,精度:0.5。输出信号:4~20mA DC。 涡轮流量传感器:测量电动调节阀支路的水流量。其型号:LWGY-6A,公称压力:6.3MPa,精度:1.0%,输出信号:4~20mA DC 温度传感器:本装置采用了两个铜电阻温度传感器,分别测量锅炉内胆、锅炉夹套的温度。经过温度传感器,可将温度信号转换为4~20mA DC电流信号。 (气体)扩散硅压力变送器:用来检测压力容器内气体的压力大小。其型号:DBYG-4000A/ST2X1,测量范围:0.6~3.5Mpa连续可调,精度:0.2,输出信号为4~20mA DC。 3、执行机构 电气转换器:型号为QZD-1000,输入信号为4~20mA DC,输出信号:20~100Ka气压信号,输出用来驱动气动调节阀。 气动薄膜小流量调节阀:用来控制压力回路流量的调节。型号为ZMAP-100,输入信号为4~20mA DC或0~5V DC,反馈信号为4~20mA DC。气源信号 压力:20~100Kpa,流通能力:0.0032。阀门控制精度:0.1%~0.3%,环境温度:-4~+200℃。 SCR移相调压模块:采用可控硅移相触发装置,输入控制信号0~5V DC或4~20mA DC 或10K电位器,输出电压变化范围:0~220V AC,用来控制电加热管加热。 水泵:型号为UPA90,流量为30升/分,扬程为8米,功率为180W。
串级控制系统整定实验报告
学院 过程控制系统实验报告书 实验名称串级控制系统整定 专业自动化专业 班级 指导教师 姓名 学号 实验日期
串级控制系统整定 一、实验目的 (1)掌握动态模型的创建方法.。 (2)掌握串级控制系统整定方法。 (3)了解控制系统的特点。 (4)了解串联控制系统的特点。 二、实验器材 计算机一台,MATLAB软件 三、实验原理 .串级控制系统:就是由两个调节器串联在一起,控制一个执 行阀,实现定值控制的控制系统。 .串级控制系统的通用方框图: .串级控制系统特点:(1)改善了被控过程的动态特性。 (2)提高了系统的工作频率。 (3)具有较强的抗扰动能力。 (4)具有一定的自适应能力。 .两步整定法
(1)工况稳定时,闭合主回路,主、副调节器都在纯比例作用的条件下,主调节器的比例度置于100%,用单回路控制系统的衰减曲线法整定,求取副调节器的比例度s δ和操作周期s T 。 (2)将副调节器的比例度置于所求得的数值上,把副回路作为主回路中的一个环节,用同样方法整定主回路,求取主调节器的比例度和操作周期。 四、实验步骤 (1)启动计算机,运行MATLAB 应用程序。 (2)在MATLAB 命令窗口输入Smulink,启动Simulink 。 (3)在Simulink 库浏览窗口中,单击工具栏中的新建窗口快捷按钮或在Simulink 库窗口中选择菜单命令File New Modeel,打开一个标题为“Untitled ”的空白模型编辑窗口。 (4)设被控对象的传递函数为: 24 21 (110)(120)s s ?++,要求被调量始 终维持在设定值。设计一个串级控制系统,并且要求控制系统的衰减率为75%,静态误差为零。用MATLAB 创建仿真模型。 (5)按两步整定法整定调节器参数。 (6)按步骤(5)的结果设置调节器参数,启动仿真,通过示波器模块观测并记录系统输出的变化曲线。 (7)施加内扰,观测系统运行情况。 . 衰减曲线法整定参数计算表:
串级控制系统
过程控制 实验报告实验名称:串级控制班级: 姓名: 学号:
实验二 串级控制系统 一、实验目的 1) 通过本实验,了解串级控制系统的基本结构以及主、副回路的性能特点。 2) 掌握串级控制系统的设计思想和主、副回路控制器的参数整定方法。 二、 实验原理 串级控制系统由两个或两个以上的控制器、相应数量的检测变送器和一个执行器组成。控制器相串联,副控制器的输入由主控制器的输出设定。主回路是恒值控制系统,对主控制器的输出而言,副回路是随动系统,对二次扰动而言,副回路是恒值控制系统。 串级控制的主要优点可概括如下: 1) 由于副回路的存在,改善了对象的部分特性,使系统的工作频率提高,加快了调节过程。 2) 由于副回路的存在,串级控制系统对二次扰动具有较强的克服能力。 3) 串级控制系统提高了克服一次扰动的能力和回路参数变化的自适应能力。 串级控制系统副回路的设计原则: 1) 副回路应尽量包含生产过程中主要的、变化剧烈、频繁和幅度大的扰动。在可能的情况下力求包含尽可能多的扰动。 2) 当对象具有较大纯滞后时,在设计时应使副回路尽量少包括或不包括纯滞后。 3) 当对象具有非线性环节时,在设计时应使非线性环节于副环之中。 4) 副回路设计时应考虑主、副对象时间常数的匹配,以防共振。 5) 所设计的副回路需考虑到方案的经济性和工艺的合理性。 串级控制系统常用的控制器参数整定方法有逐步逼近法、两步法、一步法等。 ? 逐步逼近法 1) 在主回路断开的情况下,求取副控制器的整定参数; 2) 将副控制器的参数设置在所求的数值上,使串级控制系统主回路闭合,以求取主调节器的整定参数值; 3) 将主调节器参数设置在所求值上,再次整定副控制器的参数值。 4) 如控制品质未达到指标,返回2)继续。 三、实验内容 某系统的主、副对象传递函数分别为: 122 11 (),()301(101)(1)P P G s G s s s s = = +++
论文开题报告范文(通信与控制工程)
论文开题报告范文(通信与控制工程) 题目:gis在移动通信网本地网管中的应用 1、文献综述 近年来,随着移动通信业的高速成发展,电信部门管理手段的现代化也逐步受到各级领导的高度重视。为了使通信网络的管理更加合理化、科学化,就需要用现代化的技术手段来代替低效、繁琐的手工方式。因此使用计算机技术对移动通信设备进行管理已经势在必行,这时移动通信网本地网管系统就应运而生。 同时,随着计算机技术的迅速发展,许多传统学科与计算机技术相结合从而诞生了1批新兴学科,地理信息系统就是其中之1。其英文名称为geographic information system,简称gis。它能够处理大量含有地理成分的数据信息,使你可以简单而迅速地在大量的信息中查看其模式和关系,而不必不断地访问数据库。 在通信网络中,大量的设备都有其地理位置,同时,有大量的处理如果通过地图来进行,则会又方便又直观。因此在网管系统中,引入gis系统,在电子地图上显示基站、小区等各类通信网元的分布情况,并对网元进行实时监控管理、浏览配置信息和性能查看分析。 2、选题的目的及意义 选题背景出自项目“移动通信网本地网管系统”。该系
统立足于tmn,以操作维护、环境监控工作为重点,实时监测全网的运行情况,快速响应网上的各种事件,提供性能分析报告,不仅为设备的集中操作提供了方便、可靠的技术手段,而且为网络优化和经营管理决策提供了参考依据。 地理视图作为本系统的1个子系统,是使用gis技术,在电子地图上,将各类通信网元按地理位置显示成1个分布图。用户可以对图进行操作,也可以对网元的告警、配置和性能信息进行查看和分析处理。地理视图是直接与用户交互的前台界面,其制作质量的高低将直接影响用户对整个系统的认识,可见地理视图在此项目中的重要作用和地位。此外,gis还广泛应用于诸如交通管理、商业销售等领域的软件开发中,因此,研究和开发gis系统是很有意义的。 3、研究的重点内容 本毕业设计涉及到的主要内容有:数据库存、internet 网络应用、mapinfo和asp技术。 系统的gis软件平台采用了mapinfo公司的maxxtreme。mapxtreme是1个基于internet的地图应用服务器,可以通过internet或企业内部的internet向用户发布地理信息。 该地理视图系统是浏览器/地图服务器/数据库服务器3层结构,需要windows nt server。其中地图服务器:windows nt,internet information server,mapxtreme
串级控制系统参数整定
实验三:串级控制系统参数整定 PID 控制器由于自身具有的相对容易理解和实现的特点而被广泛应用于过程控制工业中。 在实践中,它经常被融入一个复杂的控制结构中,以达到一个更好的控制效果。在这些复杂的控制结构中,通常利 用串级控制组合来减小干扰引起的最大偏差和积分误差。容易实现的优点和潜在的大控制性能的提高导致串级控制广泛应用达数十年。它已经成为一个由工业过程控制器提供的标准应用。 串级控制系统由两个控制回路构成:一个可以快速动态消除输入干扰的内部回路,和一个可以调节输出效果的外部 回路。通常,他们是通过一个连续的方式来整定的。首先,外部回路控制器设置为手动,对内部回路进行整定。随后, 启用内部回路的整定结果,接着整定外部回路。如果控制效果不理想,应该调换整定的顺序。所以,整定串级控制系统 是一项相当笨重耗时的任务,特别是具有大时间常数和时间延迟的系统。 PID 自整定解除了手动整定控制器的烦恼,并且已经成功的应用于很多工业领域中。但是,到目前为止,却很少有关于串 级系统自整定技术的发展的文学报道。其中,Li et al 利用模糊逻辑进行串级控制器的自整定。Hang et al. 应用一个重复的延迟自动整定方法来整定串级控制系统,延迟反馈测试被验证了两次,一次在内部回路,另一次在外部回路。虽然特 殊的控制器整定已经被自动化,但整定过程的自然顺序并没有改变。Tan 提出了一个在一个实验中实行整体整定过程的方法,但是这个实验需要过程的过去的信息。而且,外部回路设计时所用的极限频率是基于未考虑内部回路控制参数改 变的初始极限频率。这篇论文提供了串级控制系统自整定的一种新方法。通过利用串级控制系统的基本性能,在外部回 路中利用一个简单的延迟反馈测试来确定内部和外部回路过程模型参数。 一个基于Pade 系数和Markov 参数,匹配PID 控制器整定方法的模型,被提出来控制整体系统效果。两个例子来说明该方法的有效性。 2.串级控制系统的基本原理 图1 串级控制组合的结构如图1,内部回路嵌套于外部回路里,外部回路的输出变量是被控对象。控制系统由两个过程 和两个控制器组成。分别为外部回路传递函数1p G ,内部回路传递函数2p G ,外部回路控制器1c G 和内部回路控制器2c G 。 串级控制系统的两个控制器都是标准的反馈控制器。通常情况下,内部回路为一个比例控制器,当内部回路过程包 含基本时间延迟时需要用到积分作用,外部过程使内部回路增益是有限的。 为了在它影响到外部回路之前减小或消除内部回路干扰 d 2,内部回路比外部回路应该有一个更快的动态响应(工业经验法则里,至少应快5倍以上)。因此,内部闭环回路的相位滞后应该比外部回路小。这个特点就是应用串级控制的基本原理。内部回路的交叉频率比外部回路高,使内部回路控制器有更高的增益,能够在没有危及系统的稳定性的情况下
控制系统仿真实验报告
哈尔滨理工大学实验报告 控制系统仿真 专业:自动化12-1 学号:1230130101 姓名:
一.分析系统性能 课程名称控制系统仿真实验名称分析系统性能时间8.29 地点3# 姓名蔡庆刚学号1230130101 班级自动化12-1 一.实验目的及内容: 1. 熟悉MATLAB软件的操作过程; 2. 熟悉闭环系统稳定性的判断方法; 3. 熟悉闭环系统阶跃响应性能指标的求取。 二.实验用设备仪器及材料: PC, Matlab 软件平台 三、实验步骤 1. 编写MATLAB程序代码; 2. 在MATLAT中输入程序代码,运行程序; 3.分析结果。 四.实验结果分析: 1.程序截图
得到阶跃响应曲线 得到响应指标截图如下
2.求取零极点程序截图 得到零极点分布图 3.分析系统稳定性 根据稳定的充分必要条件判别线性系统的稳定性最简单的方法是求出系统所有极点,并观察是否含有实部大于0的极点,如果有系统不稳定。有零极点分布图可知系统稳定。
二.单容过程的阶跃响应 一、实验目的 1. 熟悉MATLAB软件的操作过程 2. 了解自衡单容过程的阶跃响应过程 3. 得出自衡单容过程的单位阶跃响应曲线 二、实验内容 已知两个单容过程的模型分别为 1 () 0.5 G s s =和5 1 () 51 s G s e s - = + ,试在 Simulink中建立模型,并求单位阶跃响应曲线。 三、实验步骤 1. 在Simulink中建立模型,得出实验原理图。 2. 运行模型后,双击Scope,得到的单位阶跃响应曲线。 四、实验结果 1.建立系统Simulink仿真模型图,其仿真模型为
第四章 串级控制系统实验
要做的实验项目是:实验一单容自衡水箱液位特性测试实验实验二单容液位定值控制系统实验实验三双容(串联)水箱特性的测试实验实验四双容(串联)水箱液位定值控制系统实验实验五双容(串联)液位串级控制系统实验实验六前 馈-反馈控制系统实验 第四章串级控制系统实验 第一节串级控制系统概述 一、串级控制系统的概述 图4-1是串级控制系统的方框图。该系统有主、副两个控制回路,主、副调节器相串联工作,其中主调节器有自己独立的给定值R,它的输出m1作为副调节器的给定值,副调节器的输出m2控制执行器,以改变主参数C1。 图4-1 串级控制系统方框图 R-主参数的给定值; C1-被控的主参数; C2-副参数; f1(t)-作用在主对象上的扰动; f2(t)-作用在副对象上的扰动。 二、串级控制系统的特点 串级控制系统及其副回路对系统控制质量的影响已在有关课程中介绍,在此将有关结论再简单归纳一下。 1.改善了过程的动态特性; 2.能及时克服进入副回路的各种二次扰动,提高了系统抗扰动能力; 3.提高了系统的鲁棒性; 4.具有一定的自适应能力。 三、主、副调节器控制规律的选择 在串级控制系统中,主、副调节器所起的作用是不同的。主调节器起定值控制作用,它的控制任务是使主参数等于给定值(无余差),故一般宜采用PI或PID调节器。由于副回路是一个随动系统,它的输出要求能快速、准确地复现主调节器输出信号的变化规律,对副参数的动态性能和余差无特殊的要求,因而副调节器可采用P或PI调节器。 四、主、副调节器正、反作用方式的选择 正如单回路控制系统设计中所述,要使一个过程控制系统能正常工作,系统必须采用负
反馈。对于串级控制系统来说,主、副调节器的正、反作用方式的选择原则是使整个系统构成负反馈系统,即其主通道各环节放大系数极性乘积必须为正值。 各环节的放大系数极性是这样规定的:当测量值增加,调节器输出也增加,则调节器的放大系数K c为负(即正作用调节器),反之,K c为正(即反作用调节器);本装置所用电动调节阀的放大系数K v恒为正;当过程的输入增大时,即调节器开大,其输出也增大,则过程的放大系数K0为正,反之K0为负。 五、串级控制系统的整定方法 在工程实践中,串级控制系统常用的整定方法有以下三种: (一)逐步逼近法 所谓逐步逼近法,就是在主回路断开的情况下,按照单回路的整定方法求取副调节器的整定参数,然后将副调节器的参数设置在所求的数值上,使主回路闭合,按单回路整定方法求取主调节器的整定参数。而后,将主调节器参数设在所求得的数值上,再进行整定,求取第二次副调节器的整定参数值,然后再整定主调节器。依此类推,逐步逼近,直至满足质量指标要求为止。 (二)两步整定法 两步整定法就是第一步整定副调节器参数,第二步整定主调节器参数。 整定的具体步骤为: 1.在工况稳定,主回路闭合,主、副调节器都在纯比例作用条件下,主调节器的比例度置于100%,然后用单回路控制系统的衰减(如4:1)曲线法来整定副回路。记下相应的比例度δ2S和振荡周期T2S。 2.将副调节器的比例度置于所求得的δ2S值上,且把副回路作为主回路中的一个环节,用同样方法整定主回路,求取主回路的比例度δ1S和振荡周期T1S。 3.根据求取的δ1S、T1S和δ2S、T2S值,按单回路系统衰减曲线法整定公式计算主、副调节器的比例度δ、积分时间T I和微分时间T d的数值。 4.按“先副后主”,“先比例后积分最后微分”的整定程序,设置主、副调节器的参数,再观察过渡过程曲线,必要时进行适当调整,直到过程的动态品质达到满意为止。 (三)一步整定法 由于两步整定法要寻求两个4:1的衰减过程,这是一件很花时间的事。因而对两步整定法做了简化,提出了一步整定法。所谓一步整定法,就是根据经验先确定副调节器的参数,然后将副回路作为主回路的一个环节,按单回路反馈控制系统的整定方法整定主调节器的参数。 具体的整定步骤为: 1.在工况稳定,系统为纯比例作用的情况下,根据K02/δ2=0.5这一关系式,通过副过程放大系数K02,求取副调节器的比例放大系数δ2或按经验选取,并将其设置在副调节器上。 2.按照单回路控制系统的任一种参数整定方法来整定主调节器的参数。 3.改变给定值,观察被控制量的响应曲线。根据主调节器放大系数K1和副调节器放大系数K2的匹配原理,适当调整调节器的参数,使主参数品质指标最佳。
北京化工大学过程控制工程串级控制系统实验报告
实验名称:串级控制实验 班级:自控 实验设备编号: 2 实验日期:年月 同组人: 年月日
实验名称:串级控制系统 实验的目的:正确认识串级控制系统,理解和熟练串级控制系统的特点和操作要求。 实验的要求:正确理解串级控制系统的特点,结合本实验装置的情况,构建一个以下水箱液位H2为主被控参数,上水箱液位H1为副被控参数,进水流量为控制手段的液位-液位串级控制系统。 实验过程的主要步骤: 1、构建串级控制系统,在软件中组态。 2、对串级控制系统进行正确的设置,确保系统的连接方式正确,正反作用正确。 3、系统启动后将调节阀CV101,CV102的开度设置在50%,80%左右。 4、待系统达到稳定,按照先副后主的顺序将串级控制系统投入自动,投运过程无扰动串级控制系统参数整定,使用一步法 1、系统流程图: 系统方框图:
串级控制系统因为具有主副两个控制回路,从传递方式来看,是串联的进行工作,主回路的输出是通过副回路起作用;按照回路闭合向来看,副回路被包括在主回路中,可以看成一个具有一定跟踪能力的控制环节,它以主回路的输出作为跟踪目标。由于副回路的存在,分担了系统中的部分容量滞后和部分干扰的镇定作用,使系统的整体放大倍数、静态控制精度、系统抗干扰能力和工作频率等指标都提高到一个新的高度。 2、为了主变量的稳定,主控制器必须具有积分作用;副环是一个随动系统,它的给定值随主控制器输出的变化而变化为了能快速跟踪,一般只需采取比例式。 主副控制器的正反作用确定应遵循先副后主的原则。为了使副回路构成一个稳定的系统,副环内所有放大倍数各环节放大倍数的乘积应是负号;主控制器的正反作用也是根据主环内各个环节的乘积为负来确定,一般,主变送器为正,副回路为正,主控制器的正反作用只取决于主对象放大倍数的符号。 投运时要按照先副后主的顺序进行,先投运副回路,再投运主回路。无扰动投运的步骤:(1)、主副控制器均放于手动位置。主控制器放于内给定,副控制器放于外给定;将主副控制器正反作用开关置于正确位置;主副控制器参数放于预定数值。 (2)、用副控制器的手操器进行手操作。 (3)、当遥控使主变量接近或等于给定值而副变量也较平稳时,调节主控制器的手操旋钮,使副控制器的偏差表指示为零,这时副控制器的自动电流将跟踪等于手动电流,于是可将副控制器切入自动。由于切换前控制器的自动电流等于手动电流,自动电流信号等于手动电流信号就意味着切换时刻不会造成控制阀阀位变化,因此切换是无扰动的。 (4)、当副环切入自动后控制稳定,主变量接近或等于给定值时,调整主控制器的内给定旋钮,使主控制器偏差表指示为零。此时主控制器的自动输出电流跟踪等于手动输出电流,于是可将主控制器切入自动。至此,系统则处于串级工作状态,而切换是无扰动的。 3、串级系统的参数整定: 与单回路的情况相同,串级控制系统也是在控制系统器投入自动后,通常并不能保证控
双容水箱液位串级控制系统课程设计
双容水箱液位串级控制系统课程设计 1. 设计题目 双容水箱液位串级控制系统设计 2. 设计任务 图1所示双容水箱液位系统,由水泵1、2分别通过支路1、2向上水箱注水,在支路一中设置调节阀,为保持下水箱液位恒定,支路二则通过变频器对下水箱液位施加干扰。试设计串级控制系统以维持下水箱液位的恒定。 1 图1 双容水箱液位控制系统示意图 3. 设计要求 1) 已知上下水箱的传递函数分别为: 111()2()()51p H s G s U s s ?==?+,22221()()1()()()201 p H s H s G s Q s H s s ??===??+。 要求画出双容水箱液位系统方框图,并分别对系统在有、无干扰作用下的动态过程进行仿真(假设干扰为在系统单位阶跃给定下投运10s 后施加的均值为0、方差为0.01的白噪声); 2) 针对双容水箱液位系统设计单回路控制,要求画出控制系统方框图,并分别对控制系统在有、无干扰作用下的动态过程进行仿真,其中PID 参数的整定要求写出整定的依据(选择何种整定方法,P 、I 、D 各参数整定的依据如何),对仿真结果进行评述; 3) 针对该受扰的液位系统设计串级控制方案,要求画出控制系统方框图及实施方案图,对控制系统的动态过程进行仿真,并对仿真结果进行评述。 4.设计任务分析
系统建模基本方法有机理法建模和测试法建模两种,机理法建模主要用于生产过程的机理已经被人们充分掌握,并且可以比较确切的加以数学描述的情况;测试法建模是根据工业过程的实际情况对其输入输出进行某些数学处理得到,测试法建模一般较机理法建模简单,特别是在一些高阶的工业生产对象。对于本设计而言,由于双容水箱的数学模型已知,故采用机理建模法。 在该液位控制系统中,建模参数如下: 控制量:水流量Q ; 被控量:下水箱液位; 控制对象特性: 111()2()()51 p H s G s U s s ?==?+(上水箱传递函数); 22221()()1()()()201p H s H s G s Q s H s s ??= ==??+(下水箱传递函数)。 控制器:PID ; 执行器:控制阀; 干扰信号:在系统单位阶跃给定下运行10s 后,施加均值为0、方差为0.01的白噪声 为保持下水箱液位的稳定,设计中采用闭环系统,将下水箱液位信号经水位检测器送至控制器(PID ),控制器将实际水位与设定值相比较,产生输出信号作用于执行器(控制阀),从而改变流量调节水位。当对象是单水箱时,通过不断调整PID 参数,单闭环控制系统理论上可以达到比较好的效果,系统也将有较好的抗干扰能力。该设计对象属于双水箱系统,整个对象控制通道相对较长,如果采用单闭环控制系统,当上水箱有干扰时,此干扰经过控制通路传递到下水箱,会有很大的延迟,进而使控制器响应滞后,影响控制效果,在实际生产中,如果干扰频繁出现,无论如何调整PID 参数,都将无法得到满意的效果。考虑到串级控制可以使某些主要干扰提前被发现,及早控制,在内环引入负反馈,检测上水箱液位,将液位信号送至副控制器,然后直接作用于控制阀,以此得到较好的控制效果。 设计中,首先进行单回路闭环系统的建模,系统框图如下: 可发现,在无干扰情况下,整定主控制器的PID 参数,整定好参数后,分别改变P 、I 、D 参数,观察各参数的变化对系统性能的影响;然后加入干扰(白噪声),比较有无干扰两