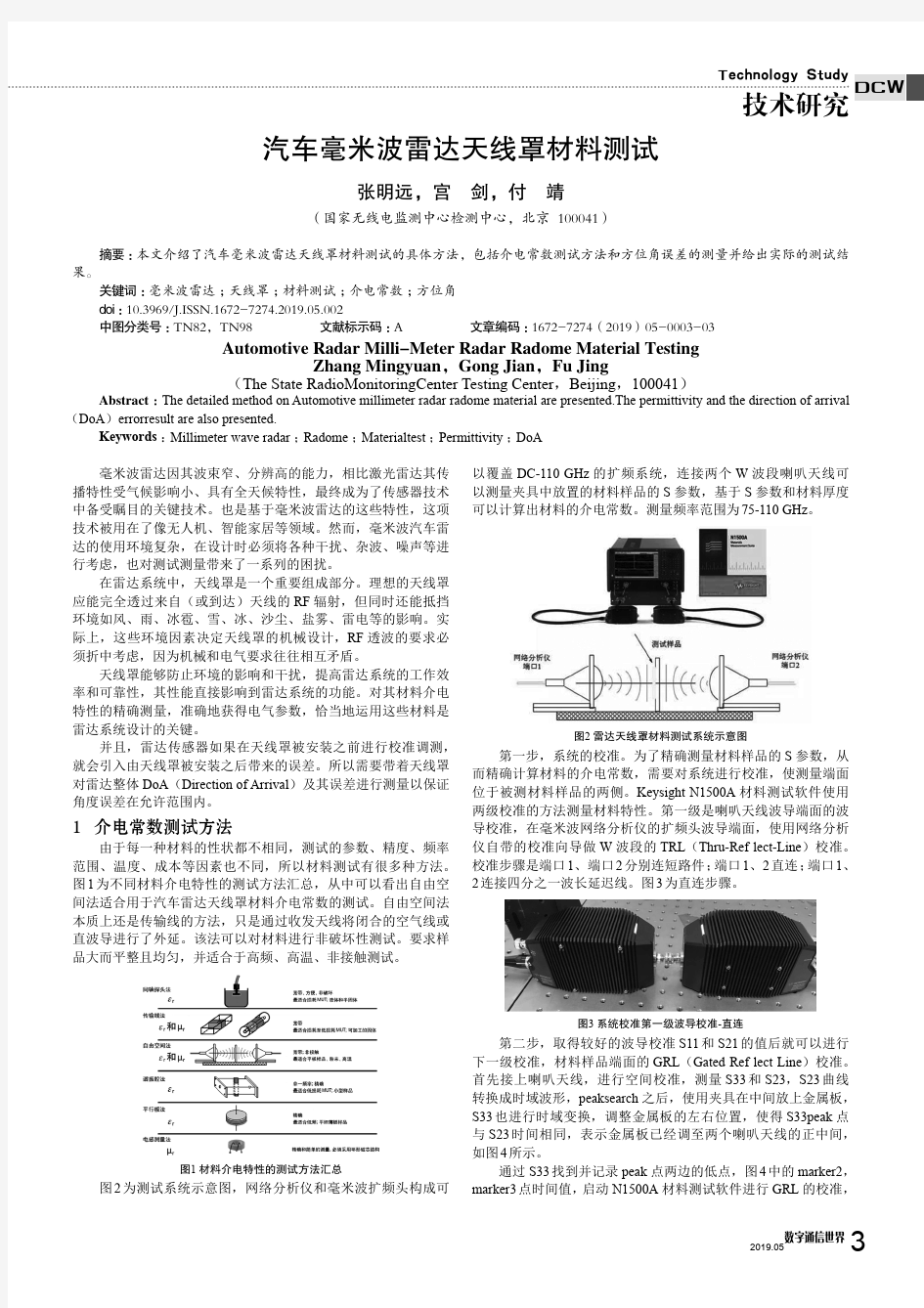
汽车毫米波雷达天线罩材料测试

探地雷达操作规程
探地雷达操作规程 (文件编号:****-010) 共1页第1页版本/版次:D/ 0 生效日期:2016-01-01 1. 目的 为了使检测员更好地熟悉和掌握检测仪器的操作方法,保证检测数据的科学、公正和准确性,特制定本规程。 2. 适用范围 适用于探地雷达仪器 3 操作步骤 3.1测试前的安装准备 检查所有部件是否带齐,包括:电池、雷达主机、数据线、处理器电源线、信号线、工具箱、备件、固定用绑扎带、记录本; 3.2试验/检测的工作程序 (1)测试连接。将地质雷达天线通过支架安装。 (2)在扫描前调试主机并对主机进行参数设置。 (3)打开电源,控制天线移动的人员根据操作主机的人员口令,将天线紧贴待测界面上匀速移动。 (4)测试结束。按下stop结束测试点,保存文件并退出; (5)拆除信号线,拆除天线,支架。 3.3扫描之前的仪器调试和参数设置 (1)菜单系统—>设置—>调用,选择所用的天线。 (2)系统—>单位垂直刻度设为时间,单位为ns (3)测程:900M天线探测混凝土的量程约为15纳秒,为使所有有效信号完全显示,一般设置为20ns (4)采样点数:一般设为512或1024 采样点数越多,扫描曲线越光滑,垂直分辨率越好。但是采样点数增大,使得扫 描速率下降 (5)每秒扫描数:64 (6)增益点数:2 (7)垂向高通滤波器:225MHz
(8)垂向低通滤波器:2500MHz (9)数据位:16位 (10)发射率:100 KHz,发射功率越高,采集速度越快,但若采集过高,易损坏雷达系统 (11)信号位置设为手动 (12)表面设为0 (13)调出完整的直达波(首波),调整延时参数 若检测结构与上次相同,可不再次设置以上参数,系统默认上次检测参数。 (14)增益设置为自动,增益函数手动设置,可以改变增益点数多少、并且可以调整各增益点的函数大小,进而调整信号强度。增益函数调整过大,在探测资料中可能 人为造成假象。设置方法为先设为手动,再设为自动。 编制/日期:批准/日期:
【CN110082734A】汽车车载毫米波雷达外部标定的标定装置、标定系统及标定方法【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910349602.0 (22)申请日 2019.04.28 (71)申请人 安徽瑞泰智能装备有限公司 地址 243000 安徽省马鞍山市当涂县承接 产业转移示范园区北京大道嘉善科技 园内 (72)发明人 舒金林 邓书朝 童宝宏 晋入龙 孙晋军 孙畅 柳敏 秦然然 (74)专利代理机构 芜湖思诚知识产权代理有限 公司 34138 代理人 阮爱农 (51)Int.Cl. G01S 7/40(2006.01) G01S 13/93(2006.01) (54)发明名称汽车车载毫米波雷达外部标定的标定装置、标定系统及标定方法(57)摘要本发明公开了汽车车载毫米波雷达外部标定的标定装置、标定系统和标定方法。本发明汽车车载毫米波雷达外部标定的标定装置,它包括底板、吸波反射机构,吸波反射机构放置在底板上;吸波反射机构包括若干块吸波材料板、若干个雷达反射装置、上支撑底座,吸波材料板和雷达反射装置均固定在上支撑底座上,每个雷达反射装置的前面至少设置有一个吸波材料板,上支撑底座放置在底板上。在汽车生产线或汽车维修服务站中使用本发明外部标定的标定装置和标定系统,可以实现对雷达安装位置的标定,用于校正汽车车载毫米波雷达支架装置的安装位置,从而保证汽车所装的雷达位置正确,从而提高了 车辆的安全性能。权利要求书2页 说明书7页 附图3页CN 110082734 A 2019.08.02 C N 110082734 A
权 利 要 求 书1/2页CN 110082734 A 1.汽车车载毫米波雷达外部标定的标定装置,其特征是:它包括底板(9)、吸波反射机构,吸波反射机构放置在底板(9)上;吸波反射机构包括若干块吸波材料板(4)、若干个雷达反射装置(5)、上支撑底座(6),吸波材料板(4)和雷达反射装置(5)均固定在上支撑底座(6)上,每个雷达反射装置(5)的前面至少设置有一个吸波材料板(4),上支撑底座(6)放置在底板(9上。 2.根据权利要求1所述的标定装置,其特征是:雷达反射装置(5)优选为四个,每个雷达反射装置(5)包括上部的标准反射目标、下部的底座,两者固接,底座固定在上支撑底座(6)上;雷达反射装置(5)上部的标准反射目标是RCS(雷达散射截面积)为0dB的标准角反射器。 3.根据权利要求1所述的标定装置,其特征是:所述的吸波材料板(4)为雷达波专用吸波材料,其个数不少于雷达反射装置(5)的个数。 4.根据权利要求1所述的标定装置,其特征是:标定装置还包括左右移动机构,左右移动机构包括左右驱动电机(1)、横向传动齿轮(2)、横向传动齿条(3)、下支撑底座(7)、运动滚轮组(8),支撑块(11)、齿条支撑块(12);下支撑底座(7)位于上支撑底座(6)的下面、两者相接触,运动滚轮组(8)设置在下支撑底座(7)的下面,且与底板(9)相接触,左右驱动电机(1)的输出端连接横向传动齿轮(2),横向传动齿轮(2)与横向传动齿条(3)相啮合,左右驱动电机(1)通过支撑块(11)固定在底板(9)上,横向传动齿条(3)的左端从左边的齿条支撑块(12)中穿过、其右端固定在右边的支撑块(12)中,左边的齿条支撑块(12)固定在底板(9)上,右边的齿条支撑块(12)固定在下支撑底座(7)的底面上。 5.根据权利要求4所述的标定装置,其特征是:左右移动机构还包括左右移动辅助机构,左右移动辅助机构包括两个移动单元,两个移动单元相对于横向移动齿条(3)前后对称设置;每个移动单元均包括横向移动导杆(13)、左右两个小支撑块(14),横向移动导杆(13)的左端从左边的小支撑块(14)中穿过、其右端固定在右边的小支撑块(14)中,左边的小支撑块(14)固定在底板(9)上,右边的小支撑块(14)固定在下支撑底座(7)的底面上。 6.根据权利要求1或4所述的标定装置,其特征是:标定装置还包括上下移动机构,上下移动机构包括上下驱动电机(10)、纵向传动齿轮(15)、纵向传动齿条(16);上下驱动电机(10)的输出端连接纵向传动齿轮(15),纵向传动齿轮(15)与纵向传动齿条(16)相啮合,纵向传动齿条(16)一端为自由端,另一端与连接块(17)固接,连接块(17)固定在上支撑底座 (6)上,上下驱动电机(10)通过支撑座(21)固定在下支撑底座(7)上。 7.根据权利要求6所述的标定装置,其特征是:上下移动机构还包括导向板(20),导向板(20)固定在支撑座(21)上,其与纵向传动齿条(16)之间通过V形槽配合。 8.根据权利要求6所述的标定装置,其特征是:上下移动机构还包括上下移动辅助机构,上下移动辅助机构包括两个移动单元,两个移动单元相对于纵向移动齿条(16)前后对称设置;每个移动单元均包括纵向移动导杆(18)、导向套(19),纵向移动导杆(18)的下端固定在下支撑底座(7)上,导向套(19)套在纵向移动导杆(18)外、其下端固定在上支撑底座(6)上。 9.汽车车载毫米波雷达外部标定的标定系统,其特征是:它包括一套权利1-8任一所述的汽车车载毫米波雷达外部标定的标定装置,还包括一个实施标定毫米波雷达安装位置的雷达标定区域、已安装毫米波雷达传感器的待标定车辆、标定控制柜; 其中,雷达标定区域位于汽车总装车间检测线的前部或汽车维修服务站; 2
CAS探地雷达说明书
CAS探地雷达采集软件说明书 RadarSample 12.10.31 中国科学院电子学研究所 Institute of Electronics, Chinese Academy of Sciences
目录 1 连接WIFI无线网络 (3) 2 RadarSample主界面说明 (4) 2.1 标题栏 (4) 2.2 工具栏 (4) 2.3 图形显示区 (6) 2.4 状态栏 (6) 3 雷达参数设置 (6) 4 调色板设置 (8) 5 保存路径设置 (8) 6 系统设置 (9) 7 GPS设置 (10) 8 滤波设置 (10) 9 背景去除设置 (11) 10 拉伸显示 (12) 11 增益曲线 (13) 12 操作实例 (14)
1 连接WIFI无线网络 在连接WIFI无线网络之前,首先要设置IP地址,如图1-1所示,IP地址设置为“192.168.1.X”,最后一个字段可以是2~255之间的任意数;子网掩码设置为“255.255.255.0”。 图1-1 设置IP地址 然后连接WIFI无线网络。如图1-2所示,点击系统工具栏上的图标,弹出如图1-3所示的操作界面,然后点击相应频率雷达的网络名(网络名为Shielded_+天线频率),最后点击网络名下面的“连接”按钮即可。 图1-2 系统工具栏 图1-3 WIFI连接图
2 RadarSample 主界面说明 RadarSample 采集软件主界面如图2-1所示,可分为4个主要功能区:标题栏、工具 栏、图形显示区和状态栏。 图2-1 RadarSample 采集软件主界面 2.1 标题栏 图2-2 标题栏 标题栏主要显示当前保存的文件名和软件版本,如图2-2所示。 2.2 工具栏 图2-3 采集软件工具栏 工具栏 图形显示区 状态栏 文件名 标题栏 软件版本
石英纤维在雷达天线罩上的应用
能应用在雷达天线罩上的材料——石英纤维石英纤维又称石英玻璃纤维,是指二氧化硅含量在99.95%以上的石英玻璃晶体熔融拉制而成,丝径在1-15μm的特种玻璃纤维。它具有很高的耐热性,能长期在1050℃下使用,瞬间耐高温达1700℃,耐温性能仅次于碳纤维,同时具有卓越的电绝缘性和介电性能。石英纤维的生产非常依赖原材料的供应,通常是直接用高纯度的石英棒送至高温区熔化拉丝。一般在2000~2100℃下拉制。 雷达天线罩是航空飞行器实现通信、探测、火控、敌我识别、电子干扰等任务功能时重要的电磁透波窗口,用于保护雷达天线或整个微波系统在恶劣环境下能够正常工作,并使电磁波正常透过的一种结构/功能体。雷达天线罩选材的依据是高强度、高模量、耐候性好、介电性能好等,其中最主要的是介电性能,具体包括介电常数(ε)和损耗角正切(tanδ)。其中tanδ越大,电磁波能量在穿透天线罩过程中转化为热量而损耗的能量就越多;ε越大,电磁波在空气与天线罩壁分界面上的反射就越大,从而导致镜像波瓣电平增加和传输效率降低。因此,要求雷达天线罩罩体材料的tanδ低至接近于零,ε尽可能低,以达到“最大传输”和“最小反射”的目的。 纤维增强树脂基复合材料是一类集结构、防热、透波于一体的功能复合材料,具有优良的介电性能,介电常数ε和介电损耗tanδ都很小,同时具有足够的力学强度和适当的弹性模量,是实际应用最广的天线罩材料。
增强纤维为纤维增强树脂基复合材料的主要承力者,在复合材料中有较高体积含量。其介电常数一般高于树脂基体,因此是决定复合材料力学性能和介电性能的主要因素。 目前,雷达天线罩纤维增强树脂基复合材料的增强材料主要有玻璃纤维、芳纶纤维和聚乙烯纤维等。石英纤维就属于玻璃纤维的一种。 玻璃纤维具有高强度、优良的介电性能、耐腐蚀、吸湿性小以及尺寸稳定等优点,是天线罩最常用的增强材料,包括E玻璃纤维,S 玻璃纤维、D玻璃纤维、高硅氧玻璃纤维等。E玻璃纤维是一种无碱玻璃,是最早用于天线罩的增强材料,价格最低,但其电性能较差;S玻璃纤维是一种高强度玻璃纤维,力学性能是玻璃纤维中最好的,介电性能中等;D玻璃纤维又称低介电玻璃纤维,是国外专门为天线罩研制的一种玻璃纤维,ε和tanδ仅次于石英纤维和高硅氧玻璃纤维,但拉伸强度和模量较其他纤维低。高硅氧玻璃纤维以E玻璃纤维为基体,其SiO2含量可达91%~99%,性能介于E玻璃纤维和石英纤维之间。 石英纤维的介电性能相对于普通玻纤的介电性更加优越,石英纤维的损耗角正切tanδ和介电常数ε在玻璃纤维体系中最低,石英玻璃纤维织物增强的二氧化硅基复合材料因含有一定的孔隙率,具有较低的介电常数较高的透过率且在较宽频带范围内基本不变化,同时与酚醛树脂、环氧树脂等树脂基体都有很好的兼容性,因而更适合作为高频透波天线罩的增强材料。
汽车毫米波雷达项目可行性研究报告
汽车毫米波雷达项目可行性研究报告 xxx有限责任公司
摘要 本文件内容所承托的权益全部为项目承办单位所有,本文件仅提供给项目承办单位并按项目承办单位的意愿提供给有关审查机构为投资项目的审批和建设而使用,持有人对文件中的技术信息、商务信息等应做出保密性承诺,未经项目承办单位书面允诺和许可,不得复制、披露或提供给第三方,对发现非合法持有本文件者,项目承办单位有权保留追偿的权利。 该汽车毫米波雷达项目计划总投资19124.63万元,其中:固定资产投资15243.33万元,占项目总投资的79.71%;流动资金3881.30万元,占项目总投资的20.29%。 达产年营业收入28234.00万元,总成本费用22190.78万元,税金及附加339.43万元,利润总额6043.22万元,利税总额7216.20万元,税后净利润4532.41万元,达产年纳税总额2683.79万元;达产年投资利润率31.60%,投资利税率37.73%,投资回报率23.70%,全部投资回收期5.72年,提供就业职位576个。 项目总论、建设必要性分析、市场前景分析、建设规模、项目选址科学性分析、土建工程设计、工艺先进性分析、环境影响概况、安全经营规范、风险应对说明、项目节能评估、项目实施计划、投资方案分析、经济效益可行性、项目评价结论等。
汽车毫米波雷达项目可行性研究报告目录 第一章项目总论 第二章项目承办单位基本情况 第三章建设必要性分析 第四章项目选址科学性分析 第五章土建工程设计 第六章工艺先进性分析 第七章环境影响概况 第八章风险应对说明 第九章项目节能评估 第十章实施进度及招标方案 第十一章人力资源 第十二章投资方案分析 第十三章经济效益可行性 第十四章项目评价结论
24GHz汽车毫米波雷达实验报告
24GHz汽车毫米波雷达实验报告 是德科技射频应用工程师王创业1. 前言 汽车毫米波雷达越来越多的被应用在汽车上面,主要作为近距离和远距离探测,起到防撞、辅助变道、盲点检测等作用。随着器件工艺和微波技术的发展,毫米波雷达产品越来越小。俗话说:“麻雀虽小,五脏俱全”,同样汽车毫米波雷达作为典型的雷达产品,也包含收发天线、发射部分、接收部分、DSP部分。典型原理框图如图1所示。汽车毫米波雷达的性能指标主要体现在测速精度、定位精度、距离分辨率、多目标识别等方面,要实现这些性能和功能,首先要做好整体系统的设计和仿真,其次对于各功能部分的性能指标要严格把控测试,最后要在实际现场环境完成测试考核。 汽车毫米波雷达体制上面主要有线性调频连续波FMCW体制雷达、频移键控FSK体制雷达、步进调频连续SFCW体制雷达。不同体制雷达在产品实现复杂程度和应用上都是有区别的。FMCW体制雷达可以同时探测到运动目标和静止目标,但是不可以同时探测多个运动目标。电路需要比较大的带宽。
FSK体制雷达,可以同时探测并且正确区分开来多个运动目标,但是不可以正确测量静止目标。电路带宽比窄,系统响应捕获比较慢,成本比FMCW体制要低很多。SFCW体制雷达,可以同时探测多个静止和运动的目标,并且将各个目标正确区分开来。SFCW体制雷达具有更为复杂的调制波形,信号处理也更为复杂,产品实现成本高。 2.实验目的 在汽车毫米波雷达系统研制过程中,经常会碰到各式各样的问题,譬如系统波形的选择和设计、系统链路的设计、信号处理算法的选择、微波电路的设计调试、天线的设计。主要的问题主要体现在系统方案、处理算法模拟、微波电路指标调试及对系统性能的影响上。典型的例子,在FMCW雷达系统,雷达探测距离分辨率不仅与信号的调制带宽有关,还与FMCW调制的线性度有关。 利用是德科技平台化解决方案,即软件+硬件+工程师,可以很容易的实现雷达系统设计仿真、处理算法验证、微波电路设计测试、天线设计测试。基于以上的问题,该实验主要实现以下三个目的: 1)软件硬件结合,SystemVue+仪表实现各类信号的产生; 2)系统设计仿真、算法验证 3)VCO线性调制度分析 4)场景信号录制回放和信号分析 3.实验要求 该实验采用FMCW雷达体制,结合SystemVue软件和仪表实现以下功能: 1)汽车雷达信号产生 a.24GHz标准雷达信号产生:Triangle调制信号、Sawtooth调 制信号
地面雷达天线罩课程设计说明书
1 引言 随着现代高科技的发展,雷达大量应用于陆、海、空三军及民航、气象等领域,相应的,雷达天线罩的运用也日益广泛。天线罩是雷达系统的重要组成部分,被称为雷达系统的“电磁窗口”。它的作用是在雷达天线的周围形成一个封闭的空间,将转动工作的雷达天线罩于其中,以保护雷达天线系统免受大气环境的直接作用。由于天线罩的遮挡,天线系统可不受风、沙、雨、雪、冰雹的侵袭,这将降低天线驱动装置的设计功率和减少天线转动实际消耗的能源,并且避免了因气候与环境原因造成的雷达关机。同时天线罩还可以缓解因气温骤变、太阳辐射、潮湿、盐雾等对天线系统的影响,因此也大大简化和减轻了天线系统的日常维护修理工作,延长路雷达的使用寿命。 世界上第一个玻璃钢雷达罩出现于20世纪40年代的美国,至今有60多年的历史。我国是从上世纪60年代开始研制玻璃钢雷达罩,最大的为直径44米的地面雷达天线罩,至今仍在使用,已有近40多年的历史,在雷达罩设计、生产、检测方面有了较丰富的经验,但与国外相比,还有一定距离。 随着雷达电性能要求的不断提高,雷达罩向大型化发展,对雷达罩的结构设计提出更加苛刻的要求。现有地面雷达罩的结构形式有3种类型:构架悬吊柔性膜鼓风式、构架—壳体式和刚性壳体式,而刚性壳体式较为普遍。 ⑴构架悬吊柔性膜鼓风式 构架悬吊柔性膜鼓风式地面雷达天线罩是用金属型材组成空间构架,在构架内悬吊涂覆尼龙的有机纤维布,有机纤维布黏合拼成中空的柔性罩,将雷达天线罩于其中。由于柔性膜很薄,因此这类天线罩对电磁波能量的吸收损耗很小,并对各种雷达工作频段具有较好的适应性,尤其适于宽频和变频雷达采用。这类天线罩的特点是:造价低,搬迁方便;但耐久性差,有噪音。 ⑵构架—壳体式 构架—壳体式地面雷达天线罩与构架悬吊柔性膜鼓风式地面雷达天线罩的相同之处在于它们都是通过金属构架来承受载荷。不同之处是,构架—壳体式天线罩用硬质材料(层和或夹芯玻璃钢)壳体代替柔性膜。构架—壳体式又称半硬壳式,天线罩的总体强度和刚度仍靠构架来保证。这种型式的天线罩适用于大直径天线的地面雷达。
汽车毫米波雷达项目可行性研究报告
汽车毫米波雷达项目 可行性研究报告 xxx投资公司
第一章概论 一、项目概况 (一)项目名称 汽车毫米波雷达项目 (二)项目选址 xxx经开区 项目属于相关制造行业,投资项目对其生产工艺流程、设施布置等都有较为严格的标准化要求,为了更好地发挥其经济效益并综合考虑环境等多方面的因素,根据项目选址的一般原则和项目建设地的实际情况,该项目选址应遵循以下基本原则的要求。 (三)项目用地规模 项目总用地面积25145.90平方米(折合约37.70亩)。 (四)项目用地控制指标 该工程规划建筑系数71.44%,建筑容积率1.13,建设区域绿化覆盖率7.09%,固定资产投资强度170.83万元/亩。 (五)土建工程指标 项目净用地面积25145.90平方米,建筑物基底占地面积17964.23平方米,总建筑面积28414.87平方米,其中:规划建设主体工程18303.93平方米,项目规划绿化面积2015.82平方米。
(六)设备选型方案 项目计划购置设备共计64台(套),设备购置费2430.96万元。 (七)节能分析 1、项目年用电量1064592.74千瓦时,折合130.84吨标准煤。 2、项目年总用水量4324.84立方米,折合0.37吨标准煤。 3、“汽车毫米波雷达项目投资建设项目”,年用电量1064592.74千 瓦时,年总用水量4324.84立方米,项目年综合总耗能量(当量值) 131.21吨标准煤/年。达产年综合节能量41.43吨标准煤/年,项目总节能 率25.84%,能源利用效果良好。 (八)环境保护 项目符合xxx经开区发展规划,符合xxx经开区产业结构调整规划和 国家的产业发展政策;对产生的各类污染物都采取了切实可行的治理措施,严格控制在国家规定的排放标准内,项目建设不会对区域生态环境产生明 显的影响。 (九)项目总投资及资金构成 项目预计总投资7414.97万元,其中:固定资产投资6440.29万元, 占项目总投资的86.86%;流动资金974.68万元,占项目总投资的13.14%。 (十)资金筹措 该项目现阶段投资均由企业自筹。 (十一)项目预期经济效益规划目标
一种新型探地雷达天线的设计分析
第3l卷第6期2009年6月 电子与信息学报 JournalofElectronics&InformationTechnology Vbl.31No.6 Jun.2009一种新型探地雷达天线的设计分析 吴秉横纪奕才方广有 (中国科学院电子学研究所北京100190) 摘要:该文研究了一种近似椭圆结构的超宽带偶极子天线。通过设计沿着振子向末端方向渐变的导体臂,可以有效地减小天线末端电流的反射,改善天线的输入阻抗特性,拓宽天线的带宽。由于没有采用任何加载措施,此天线相比电阻加载宽带天线具有更高的效率。采用三维电磁仿真软件对天线进行了分析和设计,根据设计结果实际制作了一副天线样机,并对其电压驻波比和辐射特性进行了测试,测试结果与仿真设计结果吻合良好。仿真结果和实验测试结果表明,该天线在很宽的工作频带内具有良好的阻抗特性和辐射特性。 关键词:探地雷达天线;超宽带;椭圆偶极天线:阻抗特性 中图分类号:TN957.2文献标识码:A文章编号:1009-5896(2009)06-1487-03DesignandAnalysisofaNovelGPRAntenna 渐JBing-hengJiYi-caiFangGuang-you (Instituteo,Electronics,ChineseAcademySciences,Be讲ng100190,China) Abstract:Anellipse-likeUWBdipoleisinvestigatedinthispaper.Bydesigninganovelantennastructure,whichcaneffectivelyreducethecurrent reflectionattheendofdipole,theinputimpedanceisimproved,andthebandwidthiswidened.Thedipoleismoreeffective thantheresistanceloadedbow-tieantenna.Inthisarticle,thedipoleisanalyzedanddesignedbyanEMsimulationtool andasampleantennaisproducedbasedonthedesignresults.TheVSWRandradiationpatternoftheproposedantennaaremeasuredandtheresultsprovethevalidityofthesimulation.Theresultsindicatethatthenovelantennahasawidebandwidthandagoodradiationperformance. Key words:GPRantennas;UltraWideBand(UWB);Ellipse-likedipole;Impedancecharacteristic 1引言 基于无载波脉冲体制的探地雷达(GPR)由于其非破坏性的探测特点,越来越受到国内外工程部门的关注,近几年得到了长足的发展,现已广泛应用于浅层地下目标的探测之中。探地雷达主要应用于公路、桥梁、隧道以及矿井的无损探测、地质勘探和研究,以及地下管线等各种金属和非金属目标的检测、定位、成像等。 天线是探地雷达系统中至关重要的一个组成部分,它直接影响着整个系统的性能。探地雷达系统普遍采用超宽带窄脉冲信号,因此要求天线应具有良好的辐射特性和宽带特性,以及较好的时域特性。总结各种类型的超宽带天线,只有几种类型的天线可以满足探地雷达的需要,如:电阻加载的蝶形天线,TEM喇叭天线及其变形以及螺旋天线等等。其中,蝶形天线…1由于平面的结构以及相对简单的制作方法得到了最广泛的应用。目前通过电阻加载吲此类天线,可以有效地消除天线末端的二次反射,从而获得满意的波形以及驻波特性,但是这类天线的缺点是效率偏低,影响探测效果。 对于超宽带平面天线的研究例,除去蝶形偶极子天线, 2008-09-08收到,2008-12-09改回 国家自然科学基金(60551002){fl[]家863计划项目(2008AAl02205)资助课题通过共面波导馈电的单极子超宽带天线被广泛深入研究,其中不少天线在结构上推陈出新14-6I。本文提出了一种特殊形状的偶极子天线,通过设计沿着振子向末端方向渐变的导体臂,有效地降低了天线末端电流的反射、改善了天线的输入阻抗特性,拓宽了天线的带宽。 2天线的结构 文献fl,21提到,通过电阻加载的方法来减小天线末端的电流反射,可以抑制辐射脉冲拖尾,展宽天线工作带宽,然而电阻是能量消耗元件,因此天线的辐射效率相对较低。本文设计的天线并未引入任何电阻元件,具有较高的辐射效率。图1给出了偶极天线的结构。天线的振子由一个半椭圆和半圆组合而成,通过优化确定椭圆的长轴为a=10cm,短轴为b=6cm,半圆的半径为b,中心馈电点之间的距离是4mm。整副天线印制在L×W的覆铜板上,其中L=344mm,W=220mm,覆铜板的基底是介电常数巳=4.9的FR-4材料。 图1天线的结构图 万方数据
天线罩结构的基础知识
天线罩结构的基础知识 重要注意事项:天线罩的开发和构建都很复杂。文中提及的数据仅是近似值。这些信息只能作为对该主题的初步了解,并不能替代必要的评估和测试。 雷达传感器由前端 (RFE)(具有天线结构的微波部件)和用于信号处理的元器件组成。前端是雷达的实际核心,因为它是天线发射和接收电磁信号的部位。为了解读收集到的信息,前端会将其转发给信号处理单元(图 1)。 为了保护雷达天线和电子元器件,传感器通常封闭在外壳中。这样可以保护 RFE,避免外部影响造成损坏或降低性能。由于具有穿透材料的能力,雷达往往还因为外形美观而受到青睐。这一方面尤其令产品设计师欣赏。
当谈到天线结构的这种保护壳时,雷达技术人员指的就是“天线罩”(radome)。这个词是"radar"(雷达)和 "dome"(圆顶)两个词的组合。与 iSYS-6003 上的一样,圆顶形罩主要用于固定安装的大型雷达系统,例如飞机或船舶的雷达。 然而,工业或商业应用中采用的传感器和系统还需要防止机械或化学影响,以免损害天线功能。这些都是为了适用于天线,符合雷达波的特性。 此外,在设计天线罩时,使用正确的材料也至关重要。如果电磁波传播过程中遇到物体或人体,那么该物质的特性会影响传播。为了找到适用于天线罩的材料,务必要考虑它们遇到雷达波后的影响。 表 1 概述了各种材料对微波的吸收和反射特性,以及微波对这些材料的穿透力。 雷达波必须能够穿透天线罩。金属会对雷达传感器造成屏蔽。由于具有高反射特性,因此金属不适合放在天线前方。木镶板(通常有一定的残留湿度)也不适合,因为电磁波对它的穿透力有限。 聚苯乙烯等泡沫非常适合用作覆盖材料,甚至可以不经加工就直接包裹在天线上。但是,由于较低的稳定性和对化学物质的敏感性,在选择材料时,泡沫往往会落选。
智能网联车毫米波雷达检测与标定
毫米波雷达检测与标定 班级:组别:学员:学时:个人时间段:实训目的了解毫米波雷达安装标定原理 安全注意事项1、注意个人安全及设备规范操作2、工具零配件统一顺序摆放3、做到三不落地 实训器材毫米波雷达实训台,、标定尺、毫米波雷达可视化软件、. 集成软件硬件故障系统教学组织每个设备台架按7位学员作业(2人操作、2人辅助、2人观摩/考核、1人监督)循环操作 小组成员实训前任务由小组长组织本组组员,两人一小组互相提问考核 一、实施正确√错误× 一.准备工作: 1、毫米波雷达实训台,模拟小车,4哥标定尺、毫米波雷达可视化软件、毫米波雷达检测仪器。 2、检查实训指导书及实验的预习情况。 三.毫米波雷达的外观认识与检查 1.第一步:按照车辆安装标准,将毫米波雷达装置 在实训台架的前方。记录高度,垂直角度、水平角度。 2.摆放毫米波雷达标定角反。调整毫米波雷达角反的 高度,使其与毫米波雷达处在同一高度 3.测量毫米波雷达距离角反的水平距离。
4.读取毫米波雷达软件输出距离数据,并将数据填 入到软件标定输入框中。 5.重复第二步,并将毫米波雷达角反放在毫 米波雷达左前方,右前方,十米,五米等处,重 复记录数据,并填充数据。 四.总结本次实训课 1. 强调毫米波实际车辆中的常见故障表征(识别失效、制动失效、制动距离偏差) 2. 毫米波雷达可视化校准、设置、初始化集成软件 3. 总结毫米波雷达实训课程 二、检查与评估与 1、教师对小组工作情况进行评估,并进行点评(达标√不达标×) □整理□整顿□清扫□清洁□素养□安全 2、成绩评定: 小组对本人的评定:□优□良□及格□不及格 教师对小组的评定:□优□良□及格□不及格 学生本次任务成绩:□优□良□及格□不及格
汽车毫米波雷达目标模拟器
一 汽车毫米波雷达目标模拟器 科电工程的毫米波雷达目标模拟器,用来验证车载76GHz和79GHz毫米波雷达的性能参数。解决毫米波雷达生成企业在研发,生成,质量控制等环节的测速,测距等性能测试需求。特别适合于整车条件下对ACC,FCW,AEB等辅助自动驾驶ADAS功能的验证和测量。同时也提供整车EMC暗室环境下的抗干扰版本。 科电MRT7681-02毫米波雷达目标模拟器 适用范围: ?ISO15622ACC自适应巡航控制系统; ?ISO15623FCW前向碰撞预警系统; ?商用车辆自动紧急制动系统(AEBS)性能要求及试验方法; ?GB/T20608自适应巡航控制系统性能要求与检测方法; ?ISO18682智能交通系统-外部危险检测与预警系统; ?ECE R131先进的紧急制动系统; ?JT/T883营运车辆行驶危险预警系统; ?ETSI EN302288短程设备;运输和交通遥感信息领域;在76GHz-77GHz范围内运行的雷达设备; ?ETSI EN302264短程设备;运输和交通遥感信息领域;在77GHz-81GHz范围内运行的雷达设备; ?GB/T36654-201876GHz 科电MTR78Pxx-T5DW角反射器(xx:20,15,10,5,0dBsm)
高精度毫米波雷达目标角反射器,可以用于雷达产线上的RCS性能标定测试;以及微波暗室内的雷达RCS性能标定测试频率范围:76GHz-81GHz;RCS雷达反射截面积精度:±0.5dBsm。 科电MDL76G-W单目标静态雷达目标模拟器 用于汽车毫米波雷达产线上雷达测距的性能标定。频率范围:76GHz-81GHz;延时距离: 1-150m±0.1。任意定制。
探地雷达毕业报告
地球物理与空间信息学院应用地球物理系 毕业实习报告 题目:探地雷达实习报告 姓名:胡浩 班级:061071-22 学号:20071002609 指导教师:邓世坤 二○一一年四月二十二日
前言 探地雷达是利用超高频脉冲电磁波探测地下介质分布的一种地球物理勘探方法。实践证明,它可以分辨地下1m尺度的介质分布,因此探地雷达方法以其特有的高分辨率在浅层于超浅层地质调查中有着极其广阔的应用前景。 探地雷达利用一个天线发射高频宽带电磁波,另一个天线接收来自地下介质界面的反射波。电磁波在介质中传播的时,其路径、电磁场强度于波形将随所通过介质的电性质及几何形态而变化。因此,根据接收到的波的旅行时间、幅度、与波形资料,可推断介质的结构。 第一章探地雷达的探测原理 探地雷达探测是一种快速、连续、非接触电磁波探测技术,具有采集速度快、分辨率高的特点。探地雷达向地下发送脉冲形式的高频宽带电磁波,电磁波在地下介质传播的过程中,当遇到存在电性目标体时,如空洞、分界面时,电磁波便会发生反射,返回到地面时由接收天线所接收;对接收到的电磁波进行信号处理与分析,根据信号波形、强度、双程走时等参数来推断地下目标体的空间位置、结构、电性及几何形态,从而达到对地下隐蔽目标体的探测。 如图A所示,由发射天线向地下介质中发射一定中心频率的电磁脉冲波,电磁波在地下介质中传播时,遇到介质中的电磁性(电阻率、介电率及磁导率)差异分界面发生反射和透射等现象;被反射的电磁波传回地表,由接收天线接收;通过电脑进行操作和控制;接收天线所接收的地下反射回波信号经由光纤传输到仪器控制台,转换成时间序列信号;这种时间序列即构成每一测点上的雷达波形记录道,它包含该测点处所接收到的雷达波的幅度、相位及旅行时间等信息。由电脑收集并存储每一测点上雷达波形序列,形成一个由若干记录道构成的雷达剖面(见图B)。通过对地质雷达剖面进行处理与推断解释,便可获得探测剖面线下方有关的地质特征与信息(或地下目标体的内部结构特征信息)。
最新毫米波雷达实验测试报告
毫米波雷达实验测试报告 北京中航开元技术有限公司 2016年01月7日 编写:谢浩 校对:李旭东 审阅:秦国连 1.试验概述 测试时间:2016年01月7日至8号; 测试地点:北京定陵机场; 参与测试人员:梁银生、谢浩、李旭东; 测试设备:便携式工控机; 测试时长:约120分钟(单独毫米波60分钟,联调60分钟); 测试验收方:国家电网公司国网通用航空有限公司。
2.试验照片
3.样机参数 防撞雷达样机参数如下: 工作频段:毫米波段; 发射功率: 4W; 测量通道:水平1向; 覆盖角度:雷达指向水平扇面(约45°); 工作方式:垂直实时测量,水平分层扫描测量; 尺寸:Φ400×H250mm; 重量:17kg; 系统供电:DC28V; 功耗:小于120W; 对外接口:RS422/485接口2路; 输出方式:求取反射能量最强的三个距离信息,1Hz输出;4.飞行科目 飞行测试方案说明如下: 1)信号塔作业:飞行高度与信号塔高度4/5处基本一致, 机头对准信号塔,分别测试信号距离1500m、1000m、 800m、600m、500m、400m、300m、200m、100m、50m 保持高度各平飞半分钟。 2)铁塔作业区:飞行高度与信号塔高度4/5处基本一致, 机头对准铁塔,分别测试信号距离1000m、800m、
600m、500m、400m、300m、200m、100m、50m保持高 度各平飞半分钟。 3)成组高压线作业区:飞行高度与成组高压线高度基本 一致,机头水平垂直对准高压线,分别测试信号距离 1500、1000m、800m、600m、500m、400m、300m、200m、100m、50m保持高度各平飞半分钟。 4)高大山体区:飞行高度尽量在高大山体的半山腰左右, 机头对准山体,分别测试信号距离2500m、1500、 1000m、800m、600m、500m、400m、300m、200m、100m、50m保持高度各平飞半分钟。 5)以上试验作业全部完成后,飞机返航。 5.试验测试过程及情况描述 1)飞机首先对信号塔进行测试。过程由远及近。距离在300m以上的时候数据无意义跳变,效果不是很明显。 在距离300m、200m、100m、50m效果良好。 2)然后对铁塔和高压线分别进行测试。过程由远及近。 距离在300m以上的时候数据无意义跳变。偶可以测 到距离数值,但数据不持续,存在干扰问题。在距离 300m、200m、100m、50m是效果良好。不存在上述干 扰问题。 3)最后对山体进行测试。没有明显效果。分析可能是山体的回波效果差。 4)另设备对飞机无线电存在干扰。无线电频段已经做了记录。 6.试验数据 1)信号塔
车载毫米波雷达应用研究
0 引言 毫米波雷达作为汽车主动安全领域关键传感器部件,可有效穿透雾、烟、灰尘,实现全天时、全天候工作负荷要求。目前市场上多以24GHz 和77GHz 毫米波雷达产品为主,汽车辅助驾驶系统安装毫米波雷达近年来快速增加,主要产品有车载自适应巡航装置(ACC)、前端碰撞预警系统(FCW)、辅助变道系统(LCA)、自动跟车系统(S&G)、车尾端盲区探测装置(BSD)、侧向探测系统(CTA)等车载应用毫米雷达。车载雷达通过对目标大小、速度(相对)、距离、角度、数量等参数进行测量、计算、分析、显示、预警、自动控制等操作。随着汽车市场的日益开拓,车载毫米波雷达技术测量精度更高,数据处理时间更短,探测目标更密集且搜索预警半径更大,安全可靠性更高端。而且随着技术不断成熟,车载毫米波雷达生产成本更加低廉,将能够满足无人驾驶雷达系统需求 [1] 。 1 车载毫米雷达应用市场分析 随着ADAS 市场渗透率加速提升,车载毫米波雷达一些关键部件需求量逐年递增。而目前我国车载雷达核心配件市场多依赖进口,国内自主车载毫米波雷达产品以24GHz、77GHz 为主。据世界专业预测机构分析,明年我国ADAS 市场30%渗透率进行估算,每套ADAS 配备4个短距和1个长距毫米波雷达计算,则整个车载毫米波雷达市场需求总量会达7200万个,中国汽车毫米波雷达行业的产值会达到400亿元人民币,目前,中国已经成为全球最大的汽车消费市场。 2 车载毫米雷达技术分析 2.1 车载毫米雷达频段 毫米雷达毫米波为电磁波,其波长介于1-10mm,具有抗 干扰强、波长短、窄波束易实现、频段宽、动态分辨率高等优点。毫米雷达波应用集中在汽车电子、无人机、军事雷达监测、智慧医疗、交通、家居等领域。世界很多国家在频率应用上多对车载毫米波雷达分配在24GHz 和77GHz 频段,日本等少数国家则采用60GHz 频段。由于77GHz 频段的部件体积小、天线尺寸短,容易实现单芯片集成结构,具备更高的速度分辨率、信噪比和输出功率,有利于减少成本等有点,未来全球车载毫米波雷达的频段将选择76-81GHz 频段。 2.2 车载毫米波雷达原理 车载毫米波雷达原理在于内置雷达信号接收模块和发射模块,通过内置天线向外发射毫米波信号,信号遇到目标后反射回波,雷达系统接受模块及时接收反射回波后,对信号进行FFT 处理、解析,从而获得精度极高的周围目标物体间的相对速度、相对距离、角度、运动方向等物理环境信息,计算机系统对这些信息进行识别、分类以及实施目标追踪、安全控制等,信息处理单元与自己车辆行驶信息匹配后,经过混频、滤波后把数据进行融合处理,最后车载中央处理单元(ECU)进行行驶信息的决策,同时通过语音、灯光等方式对驾驶员进行提醒、警告,或者自主进行安全操作干预,提高了驾驶的安全性能,避免事故发生。 2.3 车载雷达收发调频体制 收发调频体制是车载雷达频率工作的核心部件,其设计好坏直接影响雷达的性能。其影响着雷达目标分辨率、测速、测距、测向范围、测量精度、自动识别的模糊度等重要指标。由于雷达辐射电磁波的方式多样,因此,车载毫米波雷达可分为两种工作体制:连续波和脉冲波。连续波又有频移键控 (FSK)、相移键控(PSK)、恒频连续波 (CW)、线性调频连续波
博世——汽车毫米波雷达状态及趋势
Automotive Radar – Status and Trends Martin Schneider Robert Bosch GmbH, Corporate Research, PO box 77 77 77, D-31132 Hildesheim, Germany, +49 5121 49 2543, Schneider.Martin@https://www.360docs.net/doc/5918662497.html, Abstract — The paper gives a brief overview of automo-tive radar. The status of the frequency regulation for short and long range radar is summarized because of its impor-tance for car manufacturers and their sensor suppliers. Front end concepts and antenna techniques of 24 GHz and 77 GHz sensors are briefly described. Their impact on the sensor’s field of v iew and on the angular measurement capability is discussed. Esp. digital beamforming concepts are considered and promising results are presented. I. I NTRODUCTION First experiments in the field of automotive radar took place already in the late 50’s. I n the 70’s, more or less intensive radar developments started at microwave fre-quencies. The activities of the last decades were concen-trated mainly on developments at 17 GHz, 24 GHz, 35 GHz, 49 GHz, 60 GHz, and 77 GHz. Even from the early beginning in automotive radar the key driver of all these investigations has been the idea of collision avoidance; this idea has spent enormous motivation for many engi-neers all over the world to develop smart vehicular radar units. During this quite long period a lot of know-how has been gained in the field of microwaves and in radar signal processing. Accompanied by the remarkable pro-gress in semiconductor microwave sources (esp. Gunn sources and GaAs MMI Cs) and in available computing power of microcontrollers and digital signal processing units, the commercialization of automotive radar became feasible in the 90’s. Competing and complementing technologies in vehicu-lar surround sensing and surveillance are Lidar, ultrason-ics, and video cameras (based on CCD or CMOS chips including near-infrared sensitivity). Car manufacturers and suppliers are developing optimized sensor configura-tions for comfort and safety functions wrt. functionality, robustness, reliability, dependence on adverse weather conditions etc. Last but not least the total system costs have to meet the marketing targets to be attractive for the end customers. First applications with surround sensing technologies were parking aid (based on ultrasonics), collision warning, and Adaptive Cruise Control (ACC). For instance, collision warning systems were successfully introduced in the US in the 90’s. Greyhound installed more than 1600 radar systems (24 GHz) in their bus lines yielding a reduction of accidents of 21 percent in 1993 compared to the year before. ACC was commercialized for the first time in Japan in 1995. Whereas Lidar-ACC has been favored esp. in Ja-pan, European and US companies have been focused mainly on radar based ACC. I n 1999, Mercedes intro-duced the 77 GHz “Distronic” into the S class, followed by other premium models equipped optionally with an ACC, such as BMW 7 series, Jaguar (XKR, XK6), Cadil-lac (STS, XLR), Audi A8, and VW Phaeton. ACC is also available in Mercedes E, CL, CLK, SL class, BMW 5 and 6 series, Audi A6, Nissan (Cima, Primera), Toyota (Harrier, Celsior), Lexus (LS, GS), and Honda (Accord, nspire, Odyssey). Furthermore, ACC will become an option in the new BMW 3 series and in the new VW Passat, both with start of production in 2005. Whereas European car manufacturers offer 77 GHz systems only for ACC systems so far, their Japanese competitors Honda and Toyota already introduced an active brake assist for collision mitigation (additionally to ACC) in 2003 based on 77 GHz long range radar (LRR) technology. I n contrast to the only smooth deceleration capability of an ACC system (because ACC is only mar-keted as a comfort feature), the active brake assist pro-vides much higher braking forces for deceleration, when a threatening situation is identified and the driver starts braking, but maybe not as strong as it would be necessary to avoid a crash. This shows the trend from “comfort only” functions to active safety systems with radar sensing technologies that serve both the comfort and the safety domain. Within the next few years these active safety systems will be intro-duced in Europe. Mercedes started with the first genera-tion of their Presafe system in the S class in 2003, which isn’t based on surround sensing techniques yet but (only) on the data of the electronic stability program (ESP) and the antilock braking system (ABS). If these control units identify an imminent accident due to the car’s dynamics, electronic seat belt tensioners will be activated, seat ori-entations will be adapted, and the sunroof will be closed. The next step in this evolutionary process will be to gain some more milliseconds in advance for reaction and for automatic activation of suitable protection measures. Bosch names this system “Predictive Safety System (PSS)”, which will have mainly three stages. The first one (PSS1, to be introduced in 2005) is a preset of the brake system. As soon as a threat will be identified by the 77 GHz LRR, the brake system will be pre-filled, but this won’t be noticed by the driver. But when the driver pushes the brake pedal in such a situation, maximum braking forces will be available without any latency. I n the second stage (PSS2, 2006) the driver will be notified in a hazardous situation with an automatic, very short but intensive brake activation, accompanied by optical or acoustic signals. I n the third stage (PSS3) an automatic emergency brake will be initiated if otherwise a crash couldn’t be avoided. Bosch was recently awarded for its PSS with the “Gelber Engel (Yellow Angel)” from the