中南大学通信原理实验报告实验二 数字调制
中南大学
《通信原理》
实验报告
学生姓名
学生学号
学院信息科学与工程学院
专业班级
完成时间
实验二数字调制
一、实验目的
1、掌握绝对码、相对码概念及它们之间的变换关系。
2、掌握用键控法产生2ASK、2FSK、2DPSK信号的方法。
3、掌握相对码波形与2PSK信号波形之间的关系、绝对码波形与2DPSK信号波形之间的关系。
4、了解2ASK、2FSK、2DPSK信号的频谱与数字基带信号频谱之间的关系。
二、实验内容
1、用示波器观察绝对码波形、相对码波形。
2、用示波器观察2ASK、2FSK、2PSK、2DPSK信号波形。
3、用频谱仪观察数字基带信号频谱及2ASK、2FSK、2DPSK信号的频谱。
三、基本原理
本实验用到数字信源模块和数字调制模块。信源模块向调制模块提供数字基带信号(NRZ码)和位同步信号BS(已在实验电路板上连通,不必手工接线)。调制模块将输入的绝对码AK(NRZ码)变为相对码BK、用键控法产生2ASK、2FSK、2DPSK信号。调制模块内部只用+5V电压。
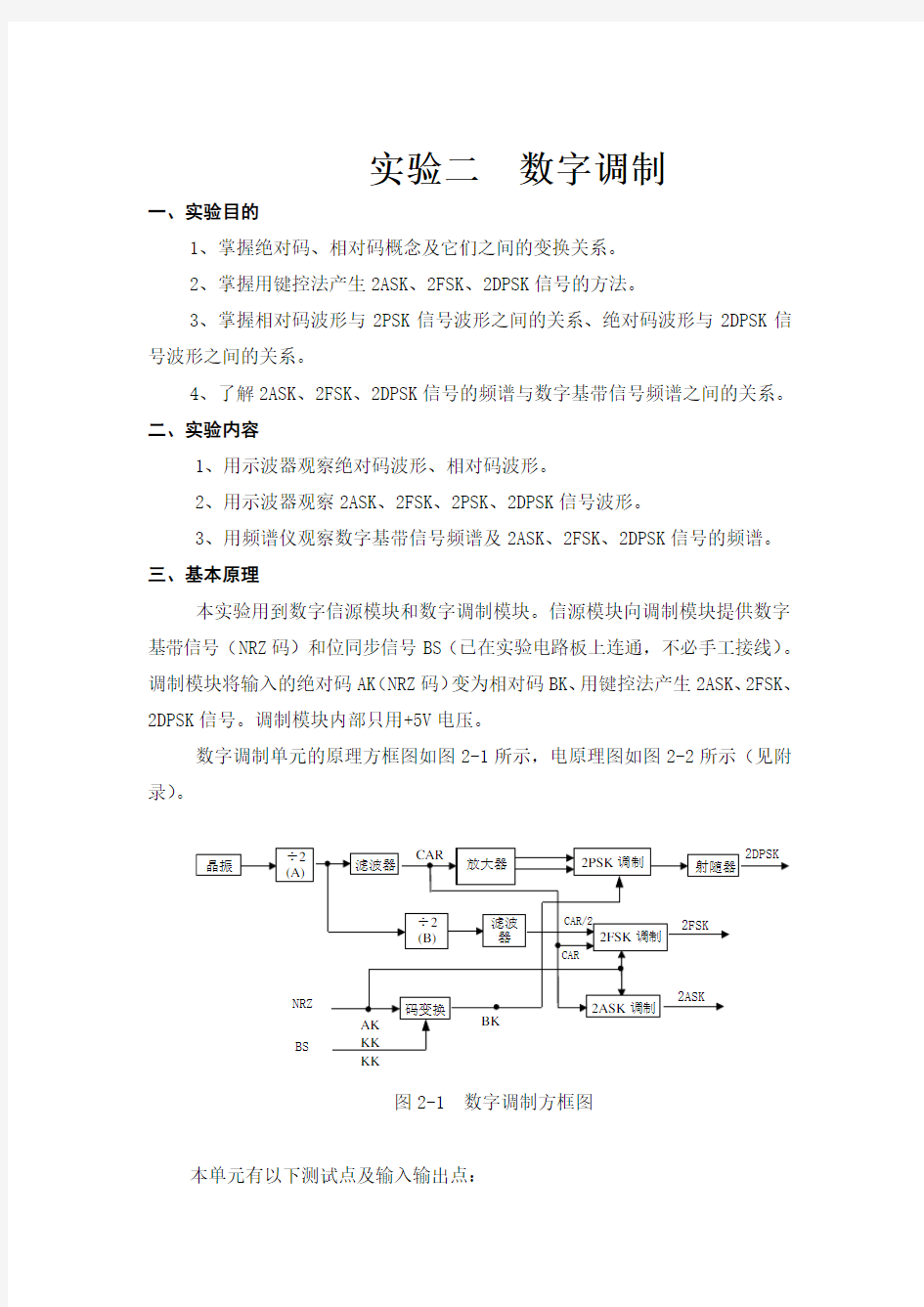
数字调制单元的原理方框图如图2-1所示,电原理图如图2-2所示(见附录)。
图2-1 数字调制方框图
本单元有以下测试点及输入输出点:
? CAR 2DPSK信号载波测试点
? BK 相对码测试点
>0.5V ? 2DPSK 2DPSK信号测试点/输出点,V
P-P
>0.5V ? 2FSK 2FSK信号测试点/输出点,V
P-P
>0.5V
? 2ASK 2ASK信号测试点,V
P-P
用2-1中晶体振荡器与信源共用,位于信源单元,其它各部分与电路板上主要元器件对应关系如下:
?÷2(A)U8:双D触发器74LS74
?÷2(B)U9:双D触发器74LS74
?滤波器A V6:三极管9013,调谐回路
?滤波器B V1:三极管9013,调谐回路
?码变换U18:双D触发器74LS74;U19:异或门74LS86 ? 2ASK调制U22:三路二选一模拟开关4053
? 2FSK调制U22:三路二选一模拟开关4053
? 2PSK调制U21:八选一模拟开关4051
?放大器V5:三极管9013
?射随器V3:三极管9013
将晶振信号进行2分频、滤波后,得到2ASK的载频2.2165MHZ。放大器的发射极和集电极输出两个频率相等、相位相反的信号,这两个信号就是2PSK、2DPSK的两个载波,2FSK信号的两个载波频率分别为晶振频率的1/2和1/4,也是通过分频和滤波得到的。
下面重点介绍2PSK、2DPSK。2PSK、2DPSK波形与信息代码的关系如图2-3所示。
图2-3 2PSK、2DPSK波形
图中假设码元宽度等于载波周期的1.5倍。2PSK信号的相位与信息代码的关系是:前后码元相异时,2PSK信号相位变化180?,相同时2PSK信号相位不变,
可简称为“异变同不变”。2DPSK信号的相位与信息代码的关系是:码元为“1”时,2DPSK信号的相位变化180 。码元为“0”时,2DPSK信号的相位不变,可简称为“1变0不变”。
应该说明的是,此处所说的相位变或不变,是指将本码元内信号的初相与上一码元内信号的末相进行比较,而不是将相邻码元信号的初相进行比较。实际工程中,2PSK或2DPSK信号载波频率与码速率之间可能是整数倍关系也可能是非整数倍关系。但不管是那种关系,上述结论总是成立的。
本单元用码变换——2PSK调制方法产生2DPSK信号,原理框图及波形图如图2-4所示。相对于绝对码AK、2PSK调制器的输出就是2DPSK信号,相对于相对码、2PSK调制器的输出是2PSK信号。图中设码元宽度等于载波周期,已调信号的相位变化与AK、BK的关系当然也是符合上述规律的,即对于AK来说是“1变0不变”关系,对于BK来说是“异变同不变”关系,由AK到BK的变换也符合“1变0不变”规律。
图2-4中调制后的信号波形也可能具有相反的相位,BK也可能具有相反的序列即00100,这取决于载波的参考相位以及异或门电路的初始状态。
2DPSK通信系统可以克服上述2PSK系统的相位模糊现象,故实际通信中采用2DPSK而不用2PSK(多进制下亦如此,采用多进制差分相位调制MDPSK),此问题将在数字解调实验中再详细介绍。
图2-4 2DPSK调制器
2PSK信号的时域表达式为
S(t)= m(t)Cosω
t
c
式中m(t)为双极性不归零码BNRZ,当“0”、“1”等概时m(t)中无直流分量,S(t)中无载频分量,2DPSK信号的频谱与2PSK相同。
2ASK 信号的时域表达式与2PSK 相同,但m(t)为单极性不归零码NRZ ,NRZ 中有直流分量,故2ASK 信号中有载频分量。
2FSK 信号(相位不连续2FSK )可看成是AK 与AK 调制不同载频信号形成的两个2ASK 信号相加。时域表达式为
t t m t t m t S c c 21cos )(cos )()(ωω+=
式中m(t)为NRZ 码。
图2-5 2ASK 、2PSK (2DPSK )、2FSK 信号功率谱
设码元宽度为T S ,f S =1/T S 在数值上等于码速率,2ASK 、2PSK (2DPSK )、2FSK 的功率谱密度如图2-5所示。可见,2ASK 、2PSK (2DPSK )的功率谱是数字基带信号m(t)功率谱的线性搬移,故常称2ASK 、2PSK (2DPSK )为线性调制信号。多进制的MASK 、MPSK (MDPSK )、MFSK 信号的功率谱与二进制信号功率谱类似。 本实验系统中m(t)是一个周期信号,故m(t)有离散谱,因而2ASK 、2PSK (2DPSK )、2FSK 也具有离散谱。 四、实验步骤
本实验使用数字信源单元及数字调制单元。
1、熟悉数字调制单元的工作原理。接通电源,打开实验箱电源开关。将数字调制单元单刀双掷开关K7置于左方N (NRZ )端。
2、用数字信源单元的FS 信号作为示波器的外同步信号,示波器CH1接信源单元的(NRZ-OUT)AK (即调制器的输入),CH2接数字调制单元的BK ,信源单元
的K
1、K
2
、K
3
置于任意状态(非全0),观察AK、BK波形,总结绝对码至相对码
变换规律以及从相对码至绝对码的变换规律。
3、示波器CH1接2DPSK,CH2分别接AK及BK,观察并总结2DPSK信号相位变化与绝对码的关系以及2DPSK信号相位变化与相对码的关系(此关系即是2PSK 信号相位变化与信源代码的关系)。注意:2DPSK信号的幅度比较小,要调节示波器的幅度旋钮,而且信号本身幅度可能不一致,但这并不影响信息的正确传输。
2DPSK AK 2DPSK BK
4、示波器CH1接AK、CH2依次接2FSK和2ASK;观察这两个信号与AK的关系(注意“1”码与“0”码对应的2FSK信号幅度可能不相等,这对传输信息是没有影响的)。
AK 2FSK AK SASK
5、用频谱议观察AK、2ASK、2FSK、2DPSK信号频谱(条件不具备时不进行
此项观察)。
条件不具备
五、实验报告要求
1、设绝对码为全1、全0或1001 1010,求相对码。
绝对码全为1时,相对码为:1010 1010
绝对码全为0时,相对码为:0000 0000
绝对码为1001 1010时,相对码为:1110 1100
2、设相对码为全1、全0或1001 1010,求绝对码。
相对码全为1时,绝对码为:1000 0000
相对码全为0时,绝对码为:0000 0000
相对码为1001 1010时,绝对码为:1101 0111
3、设信息代码为1001 1010,假定载频分别为码元速率的1倍和1.5倍,画出2DPSK及2PSK信号波形。
4、总结绝对码至相对码的变换规律、相对码至绝对码的变换规律并设计一个由相对码至绝对码的变换电路。
规律:相对码的码反变换规则为“比较相对码本码元与前一码元电位相同绝对码为0,否则为1”,反变化与之相反。
5、总结2DPSK信号的相位变化与信息代码(即绝对码)之间的关系以及2DPSK信号的相位变化与相对码之间的关系(即2PSK的相位变化与信息代码之间的关系)。
2DPSK 信号的相位变化与绝对码(信息代码)之间的关系是:“1 变0 不变”,即“1”码对应的2DPSK 信号的初相相对于前一码元内2DPSK 信号的末相变化180o,“0”码对应的2DPSK 信号的初相与前一码元内2DPSK 信号的末相同。
2PSK 信号的相位变化与相对码(信息代码)之间的关系是:“异变同不变”,即当前码元与前一码元相异时则当前码元内2PSK 信号的初相相对于前一码元
内2PSK 信号的末相变化180o。相同时则码元内2PSK 信号的初相相对于前一码元内2PSK 信号的末相无变化。
通信原理实验报告
通信原理实验报告
作者: 日期:
通信原理实验报告 实验名称:实验一—数字基带传输系统的—MATLAB方真 实验二模拟信号幅度调制仿真实验班级:10通信工程三班_________ 学号:2010550920 ________________ 姓名:彭龙龙______________
指导老师:王仕果______________
实验一数字基带传输系统的MATLA仿真 一、实验目的 1、熟悉和掌握常用的用于通信原理时域仿真分析的MATLAB函数; 2、掌握连续时间和离散时间信号的MATLAB产生; 3、牢固掌握冲激函数和阶跃函数等函数的概念,掌握卷积表达式及其物理意义,掌握卷积的计算方法、卷积的基本性质; 4、掌握利用MATLAB计算卷积的编程方法,并利用所编写的MATLAB程序验证卷积的常用基本性质; 5、掌握MATLAB描述通信系统中不同波形的常用方法及有关函数,并学会利用MATLAB求解系统功率谱,绘制相应曲线。 基本要求:掌握用MATLAB描述连续时间信号和离散时间信号的方法,能够编写 MATLAB程序,实现各种常用信号的MATLA实现,并且以图形的方式再现各种信号的波形。 二、实验内容 1、编写MATLAB程序产生离散随机信号 2、编写MATLAB程序生成连续时间信号 3、编写MATLAB程序实现常见特殊信号 三、实验原理 从通信的角度来看,通信的过程就是消息的交换和传递的过程。而从数学的角度来看,信息从一地传送到另一地的整个过程或者各个环节不外乎是一些码或信号的交换过程。例如信源压缩编码、纠错编码、AMI编码、扰码等属于码层次上的变换,而基带成形、滤波、调 制等则是信号层坎上的处理。码的变换是易于用软件来仿真的。要仿真信号的变换,必须解 决信号与信号系统在软件中表示的问题。 3.1信号及系统在计算机中的表示 3.1.1时域取样及频域取样 一般来说,任意信号s(t)是定义在时间区间(-R, +R)上的连续函数,但所有计算机的CPU都只能按指令周期离散运行,同时计算机也不能处理( -R, + R)这样一个时间段。 为此将把s(t)按区间T, T截短为 2 2 S T(t),再对S T(t)按时间间隔△ t均匀取样,得到取样 点数为: 仿真时用这个样值集合来表示信号 T Nt t s(t)。显然△ t反映了仿真系统对信号波形的分辨 率, (3-1) △ t越小则仿真的精确度越高。据通信原理所学,信号被取样以后,对应的频谱时频率的周期函数,其重复周期是—。如果信号的最高频率为f H,那么必须有f H W 丄才能保证不发 t 2 t 生频域混叠失真。设 1 B s 2 t 则称B s为仿真系统的系统带宽。如果在仿真程序中设定的采样间隔是△ (3-2) t,那么不能用
操作系统实验报告-中南大学
操作系统原理试验报告 班级: 学号: 姓名:
实验一:CPU调度 一、实验内容 选择一个调度算法,实现处理机调度。 二、实验目的 多道系统中,当就绪进程数大于处理机数时,须按照某种策略决定哪些进程优先占用处理机。本实验模拟实现处理机调度,以加深了解处理机调度的工作。 三、实验题目 1、设计一个按优先权调度算法实现处理机调度的程序; 2、设计按时间片轮转实现处理机调度的程序。 四、实验要求 PCB内容: 进程名/PID; 要求运行时间(单位时间); 优先权; 状态: PCB指针; 1、可随机输入若干进程,并按优先权排序; 2、从就绪队首选进程运行:优先权-1/要求运行时间-1 要求运行时间=0时,撤销该进程 3、重新排序,进行下轮调度 4、最好采用图形界面; 5、可随时增加进程; 6、规定道数,设置后备队列和挂起状态。若内存中进程少于规定道数,可自动从后备 队列调度一作业进入。被挂起进程入挂起队列,设置解挂功能用于将指定挂起进程解挂入就绪队列。 7、每次调度后,显示各进程状态。 实验二:内存管理 一、实验内容 主存储器空间的分配和回收 二、实验目的 帮助了解在不同的存储管理方式下,应怎样实现主存空间的分配和回收。 三、实验题目 在可变分区管理方式下,采用最先适应算法实现主存空间的分配和回收。
四、实验要求 1、自行假设主存空间大小,预设操作系统所占大小并构造未分分区表; 表目内容:起址、长度、状态(未分/空表目) 2、结合实验一,PCB增加为: {PID,要求运行时间,优先权,状态,所需主存大小,主存起始位置,PCB指针} 3、采用最先适应算法分配主存空间; 4、进程完成后,回收主存,并与相邻空闲分区合并 .1、Vo类说明(数据存储结构) 进程控制块PCB的结构: Public class PCB{ //进程控制块PCB,代表一个进程 //进程名,作为进程的标识; private String name; //要求运行时间,假设进程运行的单位时间数; private int time; //赋予进程的优先权,调度时总是选取优先数小的进程先执行; private int priority; //状态,假设有“就绪”状态(ready)、“运行”状态(running)、 //“后备”状态(waiting)、“挂起”状态(handup) private String state; //进程存放在table中的位置 private int start; //进程的大小 private int length; //进程是否进入内存,1为进入,0为未进入 private int isIn; //进程在内存中的起始位置 private int base; //进程的大小 private int limit; //一些get和set方法以及构造器省略… };
2017中南大学人工智能实验报告
“人工智能”实验报告 专业: 班级: 学号: 姓名: 2017年4月日
实验一搜索策略 (一)实验内容 1. 熟悉和掌握启发式搜索的定义、估价函数和算法过程;比较不同算法的性能。 2. 修改八数码问题或路径规划问题的源程序,改变其启发函数定义,观察结果的变化,分析原因。 (二)实验思路 1.利用已有程序“search.jar”,利用已有的“简单搜索树”图或自行构建一个图,选择DFS/BFS/Lowest Cost First/Best-First/Heuristic Depth First/A*等不同的搜索策略,观察程序运行中,OPEN表和CLOSED表的变化,观察搜索过程的变化,理解各个算法的原理。 2.任选八数码问题或路径规划问题的源程序,思考程序如何解决该问题,并对其启发函数进行修改,观察结果的变化,并分析原因 (三)程序清单 此处我选择了路径规划问题:由于篇幅原因,只附上启发函数的定义部分。 原启发函数: floatMapSearchNode::GoalDistanceEstimate( MapSearchNode&nodeGoal ) { floatxd = fabs(float(((float)x - (float)nodeGoal.x))); floatyd = fabs(float(((float)y - (float)nodeGoal.y))); return (xd + yd); } 第一次修改后的启发函数: float MapSearchNode::GoalDistanceEstimate( MapSearchNode&nodeGoal ) { float xd = fabs(float(((float)x - (float)nodeGoal.x))); float yd = fabs(float(((float)y - (float)nodeGoal.y))); float d=sqrt(xd*xd+yd*yd); return d; } 第二次修改后的启发函数: float MapSearchNode::GoalDistanceEstimate( MapSearchNode&nodeGoal ) { float xd = fabs(float(((float)x - (float)nodeGoal.x))); float yd = fabs(float(((float)y - (float)nodeGoal.y))); float d=3*sqrt(xd*xd+yd*yd); return d; } 第三次修改后的启发函数: float MapSearchNode::GoalDistanceEstimate( MapSearchNode&nodeGoal ) { float xd = fabs(float(((float)x - (float)nodeGoal.x)));
通信原理实验报告2
通信原理 实验报告 课程名称:通信原理 实验三:二进制数字信号调制仿真实验实验四:模拟信号数字传输仿真实验姓名: 学号: 班级: 2012年12 月
实验三二进制数字信号调制仿真实验 一、实验目的 1.加深对数字调制的原理与实现方法; 2.掌握OOK、2FSK、2PSK功率谱密度函数的求法; 3.掌握OOK、2FSK、2PSK功率谱密度函数的特点及其比较; 4.进一步掌握MATLAB中M文件的调试、子函数的定义和调用方法。 二、实验内容 1. 复习二进制数字信号幅度调制的原理 2. 编写MATLAB程序实现OOK调制; 3. 编写MATLAB程序实现2FSK调制; 4. 编写MATLAB程序实现2PSK调制; 5. 编写MATLAB程序实现数字调制信号功率谱函数的求解。 三、实验原理 在数字通信系统中,需要将输入的数字序列映射为信号波形在信道中传输,此时信源输出数字序列,经过信号映射后成为适于信道传输的数字调制信号。数字序列中每个数字产生的时间间隔称为码元间隔,单位时间内产生的符号数称为符号速率,它反映了数字符号产生的快慢程度。由于数字符号是按码元间隔不断产生的,经过将数字符号一一映射为响应的信号波形后,就形成了数字调制信号。根据映射后信号的频谱特性,可以分为基带信号和频带信号。 通常基带信号指信号的频谱为低通型,而频带信号的频谱为带通型。 调制信号为二进制数字基带信号时,对应的调制称为二进制调制。在二进制数字调制中,载波的幅度、频率和相位只有两种变化状态。相应的调制方式有二进制振幅键控(OOK/2ASK)、二进制频移键控(2FSK)和二进制相移键控(2PSK)。 下面分别介绍以上三种调制方法的原理,及其MATLAB实现: 本实验研究的基带信号是二进制数字信号,所以应该首先设计MATLAB程序生成二进制数字序列。根据实验一的实践和第一部分的介绍,可以很容易的得到二进制数字序列生成的MATLAB程序。 假定要设计程序产生一组长度为500的二进制单极性不归零信号,以之作为后续调制的信源,并求出它的功率谱密度,以方便后面对已调信号频域特性和基带信号频域特性的比较。整个过程可用如下程序段实现: %定义相关参数 clear all; close all; A=1 fc=2; %2Hz; N_sample=8; N=500; %码元数 Ts=1; %1 Baud/s dt=Ts/fc/N_sample; %波形采样间隔 t=0:dt:N*Ts-dt; Lt=length(t);
通信原理实验报告
实验一常用信号的表示 【实验目的】 掌握使用MATLAB的信号工具箱来表示常用信号的方法。 【实验环境】 装有MATLAB6.5或以上版本的PC机。 【实验内容】 1. 周期性方波信号square 调用格式:x=square(t,duty) 功能:产生一个周期为2π、幅度为1 ±的周期性方波信号。其中duty表示占空比,即在信号的一个周期中正值所占的百分比。 例1:产生频率为40Hz,占空比分别为25%、50%、75%的周期性方波。如图1-1所示。 clear; % 清空工作空间内的变量 td=1/100000; t=0:td:1; x1=square(2*pi*40*t,25); x2=square(2*pi*40*t,50); x3=square(2*pi*40*t,75); % 信号函数的调用subplot(311); % 设置3行1列的作图区,并在第1区作图plot(t,x1); title('占空比25%'); axis([0 0.2 -1.5 1.5]); % 限定坐标轴的范围 subplot(312); plot(t,x2); title('占空比50%'); axis([0 0.2 -1.5 1.5]); subplot(313); plot(t,x3); title('占空比75%'); axis([0 0.2 -1.5 1.5]);
图1-1 周期性方波 2. 非周期性矩形脉冲信号rectpuls 调用格式:x=rectpuls(t,width) 功能:产生一个幅度为1、宽度为width、以t=0为中心左右对称的矩形波信号。该函数横坐标范围同向量t决定,其矩形波形是以t=0为中心向左右各展开width/2的范围。Width 的默认值为1。 例2:生成幅度为2,宽度T=4、中心在t=0的矩形波x(t)以及x(t-T/2)。如图1-2所示。 t=-4:0.0001:4; T=4; % 设置信号宽度 x1=2*rectpuls(t,T); % 信号函数调用 subplot(121); plot(t,x1); title('x(t)'); axis([-4 6 0 2.2]); x2=2*rectpuls(t-T/2,T); % 信号函数调用
通信原理实验一、二实验报告
通信原理 实验一 实 验 报 告 实验日期: 学院: 班级: 学号: 姓名: 指导老师:
实验一数字基带传输系统的MA TLAB仿真 一、实验目的 1、熟悉和掌握常用的用于通信原理时域仿真分析的MATLAB函数; 2、掌握连续时间和离散时间信号的MATLAB产生; 3、牢固掌握冲激函数和阶跃函数等函数的概念,掌握卷积表达式及其物理意义,掌握 卷积的计算方法、卷积的基本性质; 4、掌握利用MATLAB计算卷积的编程方法,并利用所编写的MA TLAB程序验证卷积的 常用基本性质; 5、掌握MATLAB描述通信系统中不同波形的常用方法及有关函数,并学会利用 MATLAB求解系统功率谱,绘制相应曲线。 基本要求:掌握用MATLAB描述连续时间信号和离散时间信号的方法,能够编写 MATLAB程序,实现各种常用信号的MA TLAB实现,并且以图形的方式再现各种信号的波形。 二、实验内容 1、编写MATLAB 程序产生离散随机信号 2、编写MATLAB 程序生成连续时间信号 3、编写MATLAB 程序实现常见特殊信号 三、实验原理 从通信的角度来看,通信的过程就是消息的交换和传递的过程。而从数学的角度来看, 信息从一地传送到另一地的整个过程或者各个环节不外乎是一些码或信号的交换过程。例如 信源压缩编码、纠错编码、AMI编码、扰码等属于码层次上的变换,而基带成形、滤波、调 制等则是信号层次上的处理。码的变换是易于用软件来仿真的。要仿真信号的变换,必须解 决信号与信号系统在软件中表示的问题。 四、实验步骤 (1)分析程序program1_1 每条指令的作用,运行该程序,将结果保存,贴在下面的空白 处。然后修改程序,将dt 改为0.2,并执行修改后的程序,保存图形,看看所得图形的效果 怎样。 dt=0.01 时的信号波形 Sinusoidal signal x(t) -2-1.5-1-0.500.51 1.52 Time t (sec) dt=0.2 时的信号波形
中南大学制造系统自动化技术实验报告整理
制造系统自动化技术 实验报告 学院:机电工程学院 班级:机制**** 姓名:张** 学号: *********** 指导教师:李** 时间: 2018-11-12 实验一柔性自动化制造系统运行实验 1.实验目的 (1)通过操作MES终端软件,实现对柔性制造系统的任务下达和控制加工,让学生
了解智能制造的特征及优势。 (2)通过创意性的实验让学生了解自动化系统总体方案的构思。 (3)通过总体方案的构思让学生了解该系统的工作原理,并学会绘制控制系统流程图,掌握物料流、信息流、能量流的流动路径。 (4)通过总体方案的构思让学生掌握各机械零部件、传感器、控制元器件的工作原理及性能。 (5)通过实验系统运行让学生了解运行的可靠性、安全性是采用何种元器件来实现的,促进学生进行深层次的思考和实践。 2.实验内容 (1)仔细观察柔性自动化制造系统的实现,了解柔性自动化制造系统的各个模块,熟悉各个模块的机械结构。 (2)了解各种典型传动机构的组装、工作原理、以及如何实现运动方向和速度的改变; (3)学习多种传感器的工作原理、性能和使用方法; (4)了解典型驱动装置的工作原理、驱动方式和性能; (5)理解柔性制造系统的工作原理,完成柔性制造系统的设计、组装; (6)实现对柔性制造系统的控制与检测,完成工件抓取、传输和加工。
3.实验步骤 (1)柔性制造系统的总体方案设计; (2)进行检测单元的设计; (3)进行控制系统的设计; (4)上下料机构的组装与检测控制; (5)物料传输机构的组装与实现; (6)柔性制造系统各组成模块的连接与控制; (7)柔性制造系统各组成单元的状态与工件状态位置的检测; (8)对机器人手动操作,实现对工件的抓取、传输。 4. 实验报告 ①该柔性自动化制造系统由哪几个主要的部分组成; 主要由:总控室工作站、AGV小车输送物料机构、安川机器人上下料工作站、法那科机器人上下料工作站、ABB机器人组装工作站、视觉检测及传送工作站、激光打标工作站、堆垛机及立体仓储工作站。 ②画出该柔性自动化制造系统的物料传输系统结构简图;
算法实验报告
算法分析与设计实验报告 学院:信息科学与工程学院 专业班级: 指导老师: 学号: 姓名:
目录 实验一:递归与分治 (3) 1.实验目的 (3) 2.实验预习内容 (3) 3.实验内容和步骤 (3) 4.实验总结及思考 (5) 实验二:回溯算法 (6) 1.实验目的: (6) 2.实验预习内容: (6) 3. 实验内容和步骤 (6) 4. 实验总结及思考 (9) 实验三:贪心算法和随机算法 (10) 1. 实验目的 (10) 2.实验预习内容 (10) 3.实验内容和步骤 (10) 4. 实验总结及思考 (13)
实验一:递归与分治 1.实验目的 理解递归算法的思想和递归程序的执行过程,并能熟练编写快速排序算法程序。 掌握分治算法的思想,对给定的问题能设计出分治算法予以解决。 2.实验预习内容 递归:递归算法是把问题转化为规模缩小了的同类问题的子问题。然后递归调用函数(或过程)来表示问题的解。 一个过程(或函数)直接或间接调用自己本身,这种过程(或函数)叫递归过程(或函数). 分治:分治算法的基本思想是将一个规模为N的问题分解为K个规模较小的子问题,这些子问题相互独立且与原问题性质相同。求出子问题的解,就可得到原问题的解。 3.实验内容和步骤 快速排序的基本思想:通过一趟排序将要排序的数据分割成独立的两部分,其中一部分的所有数据都比另外一部分的所有数据都要小,然后再按此方法对这两部分数据分别进行快速排序,整个排序过程可以递归进行,以此达到整个数据变成有序序列。 源代码: #include 通信原理实验报告 一.实验目的 熟悉掌握MATLAB软件的应用,学会对一个连续信号的频谱进行仿真,熟悉sigexpand(x2,ts2/ts1)函数的意义和应用,完成抽样信号对原始信号的恢复。 二.实验内容 设低通信号x(t)=cos(4pi*t)+1.5sin(6pi*t)+0.5cos(20pi*t); (1)画出该低通信号的波形 (2)画出抽样频率为fs=10Hz(亚采样)、20Hz(临界采样)、50Hz(过采样)的抽样序列 (3)抽样序列恢复出原始信号 (4)三种抽样频率下,分别分析对比模拟信号、离散采样信号、恢复信号的时域波形的差异。 原始信号与恢复信号的时域波形之差有何特点?有什么样的发现和结论? (5)三种抽样频率下,分别分析对比模拟信号、离散采样信号、恢复信号的频域特性的差异。 原始信号与恢复信号的频域波形之差有何特点?有什么样的发现和结论? 实验程序及输出结果 clear; close all; dt=0.05; t=-2:dt:2 x=cos(4*pi*t)+1.5*sin(6*pi*t)+0.5*cos(20*pi*t); N=length(t); Y=fft(x)/N*2; fs=1/dt; df=fs/(N-1); f=(0:N-1)*df; subplot(2,1,1) plot(t,x) title('抽样时域波形') xlabel('t') grid; subplot(2,1,2) plot(f,abs(Y)); title('抽样频域信号 |Y|'); xlabel('f'); grid; 定义sigexpand函数 function[out]=sigexpand(d,M) N=length(d); out=zeros(M,N); out(1,:)=d; out=reshape(out,1,M*N); 频域时域分析fs=10Hz clear; close all; dt=0.1; t0=-2:0.01:2 t=-2:dt:2 ts1=0.01 x0=cos(4*pi*t0)+1.5*sin(6*pi*t0)+0.5*cos(20*pi*t0); x=cos(4*pi*t)+1.5*sin(6*pi*t)+0.5*cos(20*pi*t); B=length(t0); Y2=fft(x0)/B*2; fs2=1/0.01; df2=fs2/(B-1); f2=(0:B-1)*df2; N=length(t); Y=fft(x)/N*2; 通信原理课程设计报告 一. 2DPSK基本原理 1.2DPSK信号原理 2DPSK方式即是利用前后相邻码元的相对相位值去表示数字信息的一种方式。现假设用Φ表示本码元初相与前一码元初相之差,并规定:Φ=0表示0码,Φ=π表示1码。则数字信息序列与2DPSK信号的码元相位关系可举例表示如2PSK信号是用载波的不同相位直接去表示相应的数字信号而得出的,在接收端只能采用相干解调,它的时域波形图如图2.1所示。 图1.1 2DPSK信号 在这种绝对移相方式中,发送端是采用某一个相位作为基准,所以在系统接收端也必须采用相同的基准相位。如果基准相位发生变化,则在接收端回复的信号将与发送的数字信息完全相反。所以在实际过程中一般不采用绝对移相方式,而采用相对移相方式。 定义?Φ为本码元初相与前一码元初相之差,假设: ?Φ=0→数字信息“0”; ?Φ=π→数字信息“1”。 则数字信息序列与2DPSK信号的码元相位关系可举例表示如下: 数字信息: 1 0 1 1 0 1 1 1 0 1 DPSK信号相位:0 π π 0 π π 0 π 0 0 π 或:π 0 0 π 0 0 π 0 π π 0 2. 2DPSK信号的调制原理 一般来说,2DPSK信号有两种调试方法,即模拟调制法和键控法。2DPSK 信号的的模拟调制法框图如图1.2.1所示,其中码变换的过程为将输入的单极性不归零码转换为双极性不归零码。 图1.2.1 模拟调制法 2DPSK信号的的键控调制法框图如图1.2.2所示,其中码变换的过程为将输入的基带信号差分,即变为它的相对码。选相开关作用为当输入为数字信息“0”时接相位0,当输入数字信息为“1”时接pi。 图1.2.2 键控法调制原理图 码变换相乘 载波 s(t)e o(t) 实验一信号源实验 一、实验目的 1、了解通信系统的一般模型及信源在整个通信系统中的作用。 2、掌握信号源模块的使用方法。 二、实验内容 1、对应液晶屏显示,观测DDS信源输出波形。 2、观测各路数字信源输出。 3、观测正弦点频信源输出。 4、模拟语音信源耳机接听话筒语音信号。 三、实验仪器 1、信号源模块一块 2、20M双踪示波器一台 四、实验原理 信号源模块大致分为DDS信源、数字信源、正弦点频信源和模拟语音信源几部分。 1、DDS信源 DDS直接数字频率合成信源输出波形种类、频率、幅度及方波B占空比均可通过“DDS信源按键”调节(具体的操作方法见“实验步骤”),并对应液晶屏显示波形信息。 正弦波输出频率范围为1Hz~200KHz,幅度范围为200mV~4V。 三角波输出频率范围为1Hz~20KHz,幅度范围为200mV~4V。 锯齿波输出频率范围为1Hz~20KHz,幅度范围为200mV~4V。 方波A输出频率范围为1Hz~50KHz,幅度范围为200mV~4V,占空比50%不变。 方波B输出频率范围为1Hz~20KHz,幅度范围为200mV~4V,占空比以5%步进可调。 输出波形如下图1-1所示。 正弦波:1Hz-200KHz 三角波:1Hz-20KHz 锯齿波:1Hz-20KHz 方波A:1Hz-50KHz(占空比50%) 方波B:1Hz-20KHz(占空比0%-100%可调) 图1-1 DDS信源信号波形 2、数字信源 (1)数字时钟信号 24.576M:钟振输出时钟信号,频率为24.576MHz。 2048K:类似方波的时钟信号输出点,频率为2048 KHz。64K:方波时钟信号输出点,频率为64 KHz。 32K:方波时钟信号输出点,频率为32KHz。 8K:方波时钟信号输出点,频率为8KHz。 输出时钟如下图1-2所示。 计算机体系结构课程设计 学院:信息科学与工程学院 专业班级: 指导老师: 学号: 姓名: 目录 实验1 对指令操作码进行霍夫曼编码 (3) 一、实验目的 (3) 二、实验内容 (3) 三、设计思路 (4) 四、关键代码 (4) 五、实验截图 (5) 六、源代码 (5) 实验2 使用LRU 方法更新Cache (8) 一、实验目的 (8) 二、实验内容 (8) 三、设计思路 (9) 四、程序截图 (9) 五、实验代码 (9) 实验总结 (16) 参考文献 (16) 实验1 对指令操作码进行霍夫曼编码一、实验目的 了解和掌握指令编码的基本要求和基本原理 二、实验内容 1. 使用编程工具编写一个程序,对一组指令进行霍夫曼编码,并输出最后的编码结果以及对指令码的长度进行评价。与扩展操作码和等长编码进行比较。 2. 问题描述以及问题分析 举例说明此问题,例如: 下表所示: 对此组指令进行 HUFFMAN 编码正如下图所示: 最后得到的HUFFMAN 编码如下表所示: 最短编码长度为: H=0.45*1+0.30*2+0.15*3+0.05*4+0.03*5+0.01*6+0.01*6=-1.95. 要对指令的操作码进行 HUFFMAN 编码,只要根据指令的各类操作码的出现概率构造HUFFMAN 树再进行 HUFFAM 编码。此过程的难点构造 HUFFMAN 树,进行 HUFFAM 编 码只要对你所生成的 HUFFMAN 树进行中序遍历即可完成编码工作。 三、设计思路 观察上图,不难看出构造 HUFFMAN 树所要做的工作:1、先对各指令操作码的出现概率进行排序,构造一个有序链表。2、再取出两个最小的概率节点相加,生成一个生的节点加入到链表中,同时从两表中删除此两个节点。3、在对链表进行排序,链表是否只有一个节点,是则 HUFFAN 树构造完毕,否则继续做 2 的操作。为此设计一个工作链表(链表的元素时类,此类的功能相当结构。)、HUFFMAN 树节点、HUFFMAN 编码表节点。 四、关键代码 哈夫曼树重点在于如何排列权值大小不同的结点的顺序 private int leafNum; //叶子结点个数 private HaffmanNode[] hnodes; //哈夫曼树的结点数组 public HaffManCode(double[] weight) //构造指定权值集合的哈夫曼树 { int n = weight.length; //n个叶子结点 this.leafNum = n; this.hnodes = new HaffmanNode[2*n-1]; //n个叶子结点的哈夫曼树共有2n-1个结点 for(int i=0; i “人工智能”实验报告 专业 班级 学号 姓名 目录 一、实验八自动规划实验群 (3) 二、实验一生产式系统实验群 (6) 三、实验二搜索策略实验群 (7) 四、实验七神经网络 (9) 五、实验心得和体会 (10) 实验八自动规划实验群 姓名班级指导老师日期2011.12 实验目 的 熟悉和掌握自动规划的基本原理,方法和主要技术。 实验原理规划是一种问子题求解技术,它从某个特定的问题状态出发,寻求一系列行为动作,并建立一个操作序列,直到求得目标状态为止。简而言之,规划是一个行动过程的描述。一个总规划可以含有若干个子规划。 实验环 境 转载相 关源文 件 实验环境 转载相关源文件 实现过 程 单步观察实验算法 算法结果分析 观测结果通过规定规则,确定initial state和goal state,使得移动臂按照规则进行移动。分别进行clear holding pickup putdown putdowntable等实现对木块的移动。 实现过程先进行逆向推理选择,找出途径后再进行移动。 学生结论对于不同的规则将会出现不同的移动过程。通过规定不同的动作可实现不通过的移动。 实验一生产式系统实验群 姓名指导老师日期2011.12 实验目的熟悉和掌握产生式系统的运行机制,掌握基 于规则推理的基本方法。 推理方 法 逆向推理 建立规则库建立事实库 该动物是哺乳动物<- 该动物有毛发. 该动物是哺乳动物<- 该动物有奶. 该动物是鸟<- 该动物有羽毛. 该动物是鸟<- 该动物会飞&会下蛋. 该动物是食肉动物<- 该动物吃肉. 该动物是食肉动物<- 该动物有犬齿&有爪&眼盯前方. 该动物是有蹄类动物<- 该动物是哺乳动物&有蹄. 该动物是有蹄类动物<- 该动物是哺乳动物& 是嚼反刍动物. 该动物是金钱豹<- 该动物是哺乳动物&是食肉动物&是黄褐色&身上有暗斑点. 该动物是虎<- 该动物是哺乳动物&该动物是食肉动物&是黄褐色&身上有黑色条纹. 该动物是长颈鹿<- 该动物是有蹄类动物&有长脖子&有长腿&身上有暗斑点. 该动物是斑马<- 该动物是有蹄类动物&身上有黑色条纹. 该动物是鸵鸟<- 该动物是鸟&有长脖子&有长腿&不会飞&有黑白二色. 该动物是企鹅<- 该动物是鸟&会游泳&不会飞&有黑白二色. 该动物是信天翁<- 该动物是鸟&善飞. %------动物识别系统事实集: %会游泳. %--该动物是企鹅 %不会飞. %有黑白二色. %该动物是鸟. %-------- %--该动物是鸟 %该动物会飞. %会下蛋. %----该动物是金钱豹<- 该动物是哺乳动物&是食肉动物&是黄褐色&身上有暗斑点. %该动物有毛发. %是食肉动物. %是黄褐色. %身上有暗斑点. %----该动物是虎<- 该动物是哺乳动物&该动物是食肉动物&是黄褐色&身上有黑色条纹. %该动物是哺乳动物. %是食肉动物. %是黄褐色. %身上有暗斑点. %----该动物是长颈鹿<- 该动物是有蹄类动物&有长脖子&有长腿&身上有暗斑点. %该动物是有蹄类动物. %有长脖子. %有长腿. %身上有暗斑点. 预测结果假设目标为该动物是金钱豹,则结果为true. 实验过程及结果(注意观测规则的匹配过程和方法) (1)假设这个动物是金钱豹。为了检验这个假设,根据规则, 要求这个动物是哺乳动物&是食肉动物&是黄褐色&身上有暗 斑点. (2)必须检验这个动物是否为哺乳动物。先由规则库中的: 该动物是哺乳动物<- 该动物有毛发.该动物是哺乳动物<- 备注(原因等) 根据逆向推理可以逐步 确定 通信原理 实 验 报 告 实验一 数字基带信号实验(AMI/HDB3) 一、 实验目的 1、了解单极性码、双极性码、归零码、不归零码等基带信号波形特点 2、掌握AMI 、HDB 3的编码规则 3、掌握从HDB 3码信号中提取位同步信号的方法 4、掌握集中插入帧同步码时分复用信号的帧结构特点 5、了解HDB 3(AMI )编译码集成电路CD22103 二、 实验内容 1、用示波器观察单极性非归零码(NRZ )、传号交替反转码(AMI )、三阶高密度 双极性码(HDB 3)、整流后的AMI 码及整流后的HDB 3码 2、用示波器观察从HDB 3/AMI 码中提取位同步信号的波形 3、用示波器观察HDB 3、AMI 译码输出波形 三、 基本原理 本实验使用数字信源模块(EL-TS-M6)、AMI/HDB 3编译码模块(EL-TS-M6)。 BS S5S4S3S2S1 BS-OUT NRZ-OUT CLK 并 行 码 产 生 器 八选一 八选一八选一分 频 器 三选一 NRZ 抽 样 晶振 FS 倒相器 图1-1 数字信源方框图 010×0111××××××××× ×××××××数据2 数据1 帧同步码 无定义位 图1-2 帧结构 四、实验步骤 1、 熟悉信源模块和HDB3/AMI 编译码模块的工作原理。 2、 插上模块(EL-TS-M6),打开电源。用示波器观察数字信源模块上的各种信号波形。 用FS 作为示波器的外同步信号,进行下列观察: (1) 示波器的两个通道探头分别接NRZ-OUT 和BS-OUT ,对照发光二极管的发光状态,判断数字信源单元是否已正常工作(1码对应的发光管亮,0码对应的发光管熄); 实验一、PCM编译码实验 实验步骤 1. 准备工作:加电后,将交换模块中的跳线开关KQ01置于左端PCM编码位置,此时MC145540工作在PCM编码状态。 2. PCM串行接口时序观察 (1)输出时钟和帧同步时隙信号观测:用示波器同时观测抽样时钟信号(TP504)和输出时钟信号(TP503),观测时以TP504做同步。分析和掌握PCM编码抽样时钟信号与输出时钟的对应关系(同步沿、脉冲宽度等)。 (2)抽样时钟信号与PCM编码数据测量:用示波器同时观测抽样时钟信号(TP504)和编码输出数据信号端口(TP502),观测时以TP504做同步。分析和掌握PCM编码输出数据与抽样时钟信号(同步沿、脉冲宽度)及输出时钟的对应关系。 3. PCM编码器 (1)方法一: (A)准备:将跳线开关K501设置在测试位置,跳线开关K001置于右端选择外部信号,用函数信号发生器产生一个频率为1000Hz、电平为2Vp-p的正弦波测试信号送入信号测试端口J005和J006(地)。 (B)用示波器同时观测抽样时钟信号(TP504)和编码输出数据信号端口(TP502),观测时以TP504做同步。分析和掌握PCM编码输出数据与抽样时钟信号(同步沿、脉冲宽度)及输出时钟的对应关系。分析为什么采用一般的示波器不能进行有效的观察。 (2)方法二: (A)准备:将输入信号选择开关K501设置在测试位置,将交换模块内测试信号选择开关K001设置在内部测试信号(左端)。此时由该模块产生一个1KHz的测试信号,送入PCM编码器。(B)用示波器同时观测抽样时钟信号(TP504)和编码输出数据信号端口(TP502),观测时以内部测试信号(TP501)做同步(注意:需三通道观察)。分析和掌握PCM编码输出数据与帧同步时隙信号、发送时钟的对应关系。 4. PCM译码器 (1)准备:跳线开关K501设置在测试位置、K504设置在正常位置,K001置于右端选择外部信号。此时将PCM输出编码数据直接送入本地译码器,构成自环。用函数信号发生器产生一个频率为1000Hz、电平为2Vp-p的正弦波测试信号送入信号测试端口J005和J006(地)。 (2) PCM译码器输出模拟信号观测:用示波器同时观测解码器输出信号端(TP506)和编码器输入信号端口(TP501),观测信号时以TP501做同步。定性的观测解码信号与输入信号的关系:质量、电平、延时。 5. PCM频率响应测量:将测试信号电平固定在2Vp-p,调整测试信号频率,定性的观测解码恢复出的模拟信号电平。观测输出信号信电平相对变化随输入信号频率变化的相对关系。 通信原理软件实验报告 学院:信息与通信工程学院 班级: 一、通信原理Matlab仿真实验 实验八 一、实验内容 假设基带信号为m(t)=sin(2000*pi*t)+2cos(1000*pi*t),载波频率为20kHz,请仿真出AM、DSB-SC、SSB信号,观察已调信号的波形和频谱。 二、实验原理 1、具有离散大载波的双边带幅度调制信号AM 该幅度调制是由DSB-SC AM信号加上离散的大载波分量得到,其表达式及时间波形图为: 应当注意的是,m(t)的绝对值必须小于等于1,否则会出现下图的过调制: AM信号的频谱特性如下图所示: 由图可以发现,AM信号的频谱是双边带抑制载波调幅信号的频谱加上离散的大载波分量。 2、双边带抑制载波调幅(DSB—SC AM)信号的产生 双边带抑制载波调幅信号s(t)是利用均值为0的模拟基带信号m(t)和正弦载波 c(t)相乘得到,如图所示: m(t)和正弦载波s(t)的信号波形如图所示: 若调制信号m(t)是确定的,其相应的傅立叶频谱为M(f),载波信号c(t)的傅立叶频谱是C(f),调制信号s(t)的傅立叶频谱S(f)由M(f)和C(f)相卷积得到,因此经过调制之后,基带信号的频谱被搬移到了载频fc处,若模拟基带信号带宽为W,则调制信号带宽为2W,并且频谱中不含有离散的载频分量,只是由于模拟基带信号的频谱成分中不含离散的直流分量。 3、单边带条幅SSB信号 双边带抑制载波调幅信号要求信道带宽B=2W, 其中W是模拟基带信号带宽。从信息论关点开看,此双边带是有剩余度的,因而只要利用双边带中的任一边带来传输,仍能在接收机解调出原基带信号,这样可减少传送已调信号的信道带宽。 单边带条幅SSB AM信号的其表达式: 或 其频谱图为: 三、仿真设计 1、流程图: 算法设计与分析基础 ——实验报告 姓名:周建权 学号:0909122820 班级:信安1202 实验一分治 —最近点对 一.问题 Problem Have you ever played quoit in a playground? Quoit is a game in which flat rings are pitched at some toys, with all the toys encircled awarded. In the field of Cyberground, the position of each toy is fixed, and the ring is carefully designed so it can only encircle one toy at a time. On the other hand, to make the game look more attractive, the ring is designed to have the largest radius. Given a configuration of the field, you are supposed to find the radius of such a ring. Assume that all the toys are points on a plane. A point is encircled by the ring if the distance between the point and the center of the ring is strictly less than the radius of the ring. If two toys are placed at the same point, the radius of the ring is considered to be 0. Input The input consists of several test cases. For each case, the first line contains an integer N (2 <= N <= 100,000), the total number of toys in the field. Then N lines follow, each contains a pair of (x, y) which are the coordinates of a toy. The input is terminated by N = 0. Output For each test case, print in one line the radius of the ring required by the Cyberground manager, accurate up to 2 decimal places. 二.分析思路 题目是给n个点的坐标,求距离最近的一对点之间距离的一半。第一行是一个数n表示有n个点,接下来n行是n个点的x坐标和y坐标。 首先,假设点是n个,编号为1到n。找一个中间的编号mid,先求出1到mid点的最近距离设为d1,还有mid+1到n的最近距离设为d2。如果说最近点对中的两点都在1-mid 集合中,或者mid+1到n集合中,则d就是最小距离了。但是还有可能的是最近点对中的两点分属这两个集合,若存在,则把这个最近点对的距离记录下来,去更新d。这样就得到最小的距离d了。 三.源代码 #include通信原理实验报告
通信原理2DPSK调制与解调实验报告
通信原理实验报告一
中南大学 计算机体系结构实验报告
中南大学人工智能实验报告
通信原理实验报告
通信原理实验报告89077
北邮通信原理软件实验报告XXXX27页
中南大学算法实验报告