龙驭球《结构力学Ⅰ》(第4版)笔记和课后习题(含考研真题)详解(静定结构总论)【圣才出品】
第9章静定结构总论
9.1 复习笔记
本章对静定结构的相关知识进行了归纳总结。介绍了几何构造分析与受力分析之间的对偶关系,归纳了零载法的详细求解步骤,分析了空间杆件体系的几何构造,阐述了空间杆件体系与平面杆件体系的联系,介绍了静定结构的受力特性,比较了静定结构不同结构形式的优缺点。
一、几何构造分析与受力分析之间的对偶关系
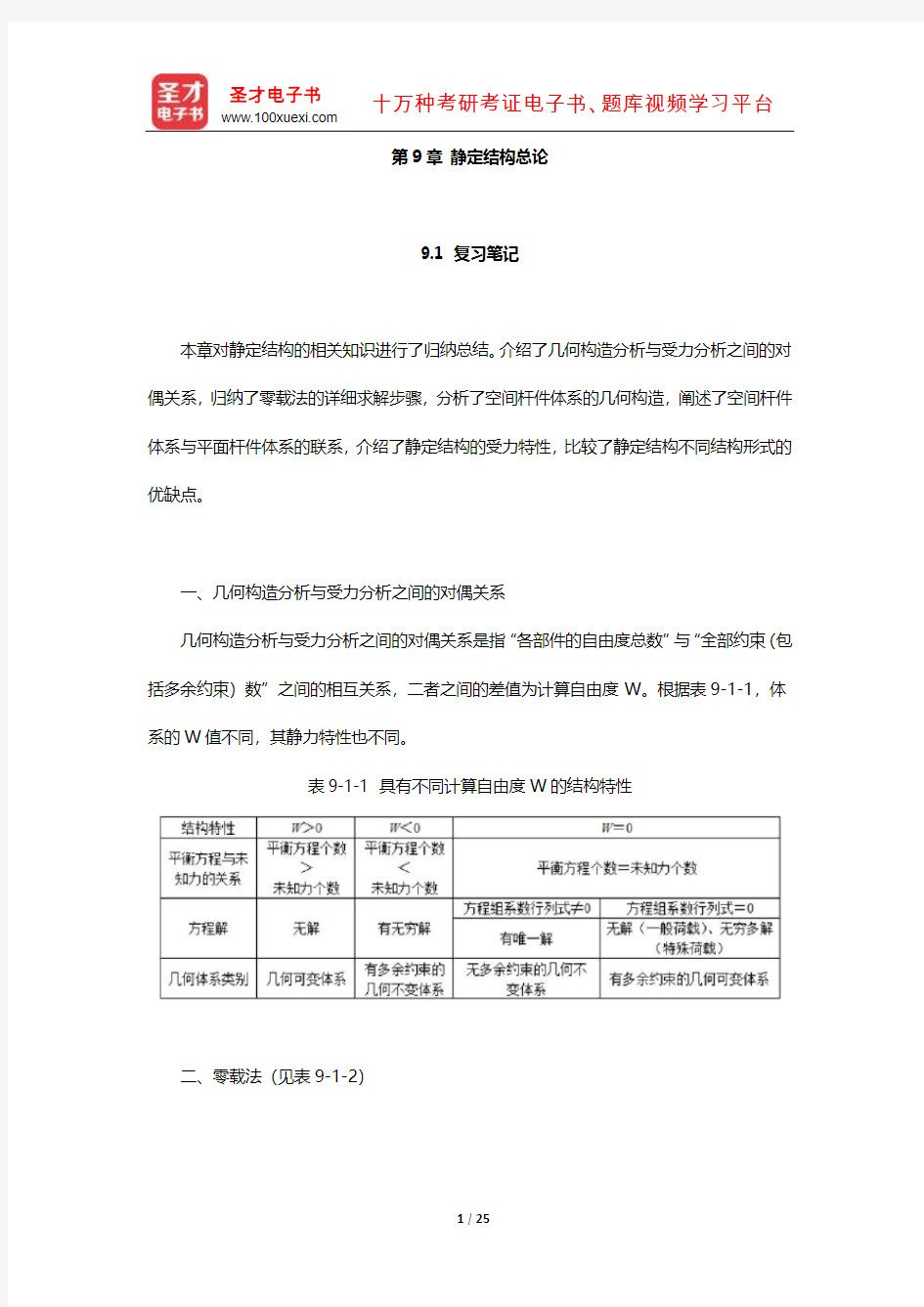
几何构造分析与受力分析之间的对偶关系是指“各部件的自由度总数”与“全部约束(包括多余约束)数”之间的相互关系,二者之间的差值为计算自由度W。根据表9-1-1,体系的W值不同,其静力特性也不同。
表9-1-1 具有不同计算自由度W的结构特性
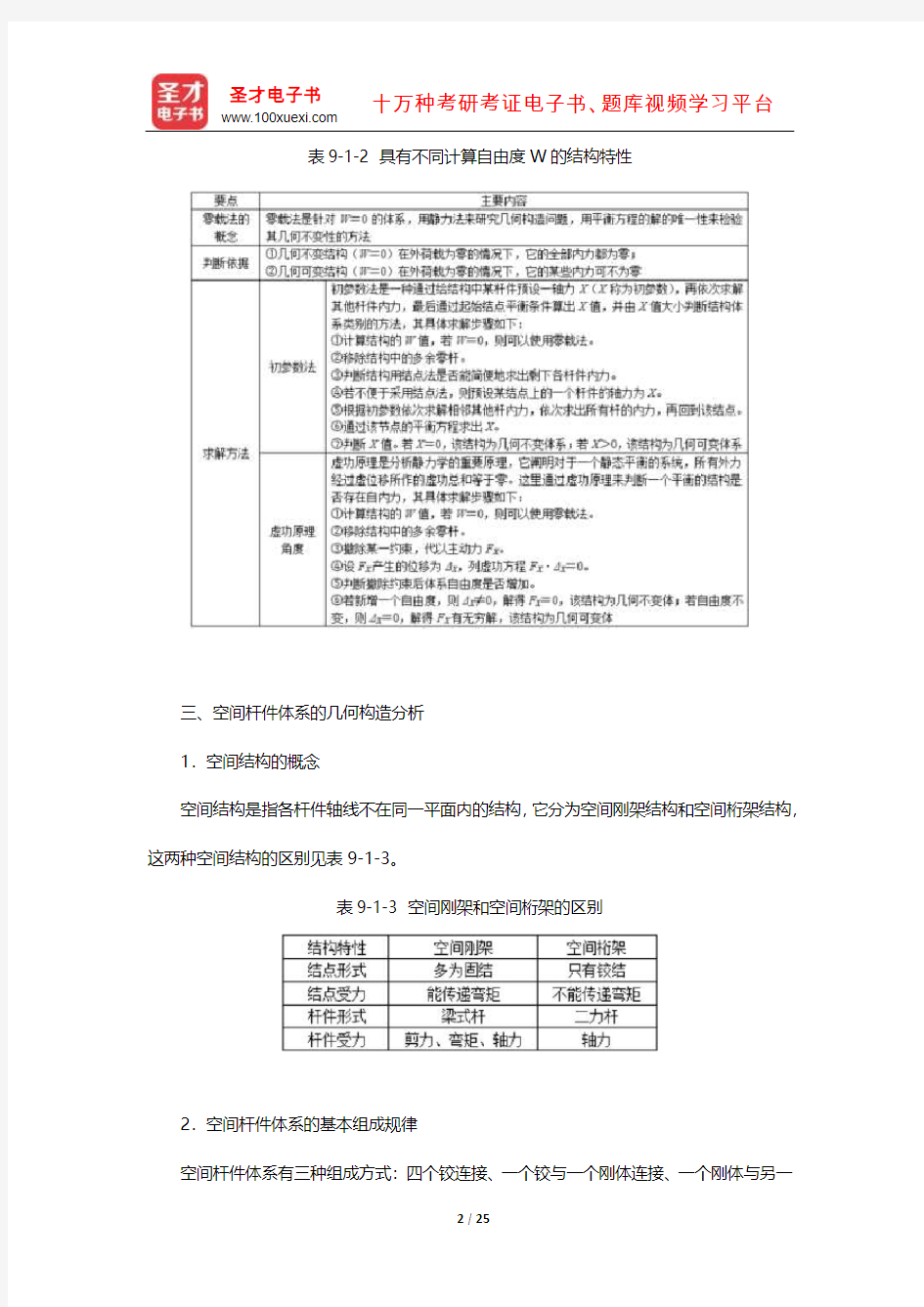
二、零载法(见表9-1-2)
表9-1-2 具有不同计算自由度W的结构特性
三、空间杆件体系的几何构造分析
1.空间结构的概念
空间结构是指各杆件轴线不在同一平面内的结构,它分为空间刚架结构和空间桁架结构,这两种空间结构的区别见表9-1-3。
表9-1-3 空间刚架和空间桁架的区别
2.空间杆件体系的基本组成规律
空间杆件体系有三种组成方式:四个铰连接、一个铰与一个刚体连接、一个刚体与另一
个刚体(基础)连接。不同组成方式的连接方式、限值条件见表9-1-4,此外,表9-1-4还分析了空间杆件体系与平面杆件体系之间的联系。
表9-1-4 空间杆件体系的连接方式
3.空间铰接体系的计算自由度W
设体系上结点的总数为j,链杆与支杆总数为b。空间中一个点具有3个自由度,一根链杆或支杆约束结点一个自由度,因此体系多余自由度个数W表示为
W=3j-b
根据表9-1-1可判断不同W值下结构的静力特性。
四、静定空间刚架
1.空间刚架问题
当组成刚架的杆件轴线与外荷载不在同一平面内时,这类问题称为空间刚架问题。
2.内力计算
空间刚架有3个位移自由度、3个转动自由度,因此杆件截面具有6个内力分量(F N、F Q1、F Q2、M X、M Y、M Z),可由6个平衡方程分别求解,其计算方法与平面刚架体系相同。
3.位移计算
空间刚架的位移计算通常只需考虑空间杆绕截面两个主轴的弯矩,以及绕杆轴线的扭矩的影响。
五、静定结构的受力特性
静定结构是指无多余约束、仅由自身平衡条件即可求出所有内力且解答唯一的结构,它具有以下几个特性,见表9-1-5。
表9-1-5 静定结构的受力特性
六、各种结构形式的受力特点
1.按支座有无侧向推力分类
按支座处有无推力,可将结构分为有推力结构(如拱、三铰刚架)和无推力结构(如梁
式链杆)。
2.按杆件是否承受弯矩分类
通常把不承受弯矩的杆件称为链杆,把能够承受弯矩的杆件称为梁式杆。
3.各结构形式优缺点
在无弯矩状态下,链杆截面上的正应力分布均匀,因此能够充分利用材料的强度;在弯矩状态下,梁式杆截面边缘应力较大,中性轴附近应力小,因此没有充分利用材料强度。因此为了尽量减小杆件中的弯矩,工程中采用不同的结构形式,各结构形式的优缺点见表
9-1-6。
表9-1-6 不同结构形式的优缺点
9.2 课后习题详解
9-1 试用零载法检验图9-2-1所示体系是否几何不变。
图9-2-1
解:(a)将三支座从左到右依次标为A,B,C,给予F B=2x(↓)由2x·2a+4a·F C=0得F C=-x(↑)取如下结构。
图9-2-2
在图9-2-2中标出杆的内力,对点D分析:∑F y=0,即2x-x=0,x=0。
满足零载法相关条件,结构为几何不变。
(b)将三个支架座从左到右依次标为A,B,C,令F B=2x(↓)由M C=2x·a+F A·2a =0,F A=x(↑)。