车辆制动系统需液量仿真分析
88液%与气(2018年第5期
doi:10.11832/j.issn.1000-4858.2018. 05.015
车辆制动系统需液量仿真分析
王权,刘伟,张致兴,吴志强,张杰,陈颖
(万向钱潮股份有限公司钱潮技术中心,浙江杭州311200)
摘要:需液量是制动系统关键性设计参数,目前关于制动系统需液量的研究缺乏理论和仿真依据。
通过解析车辆制动系统的结构和工作原理,推导需液量关于制动液压强的数学公式,并基于AMESim的设计
探索工具,搭建可自寻优的需液量仿真模型。根据实测数据寻找制动系统仿真模型的最优参数拟合值,并利
用自寻优出的模型对制动系统需液量的影响因素进行仿真分析。结果表明,该模型可根据目标需液量反向
推导出制动系统的关键设计参数,并用以模拟制动系统的需液量分析,为制动系统的设计和故障诊断提供参
依。
关键词:制动系统;需液量;AMESim#自寻优;影响因素
中图分类号:TH137 文献标志码:B文章编号=1000-4858(2018)05-0088-05
Simulation Analysis for Required Fluid Amount of Automobile Brake System
WANGQuan,LIUWei,ZHANG Zhi-xing,WUZhi-qiang,ZHANGJie,CHENYing
(W an xian g Q ian ch ao C o.,Ltd.,T ech n o lo gy C enter,H an gzhou,Z hejiang311200)
Abstract:The required fluid amount is a key design parameter for brake system.At present,there i oretical and simulation bases for tlie research on required fluid amount.By the analysis of automobil structure and work principle,a hydraulic pressure mathematical formula for required fluid amount is d self-optimization simulation model is built by the design exploration tool of AMESim.According to the measured da-
ta,we find the optimal parameter of brake system simulation model.Then the influence factors of require m ount for brake s ystem are analyzed by the self-optimization model.The results show that through the modified
model,we can deduce the key design parameters of brake system according to the target required fluid amount.It
is used to simulate the required fluid amount of brake system and provide a basis for d brake?y?tem.
Key words:brake system,required fluid amount,AMESim,self-optimization,influence factors
引言
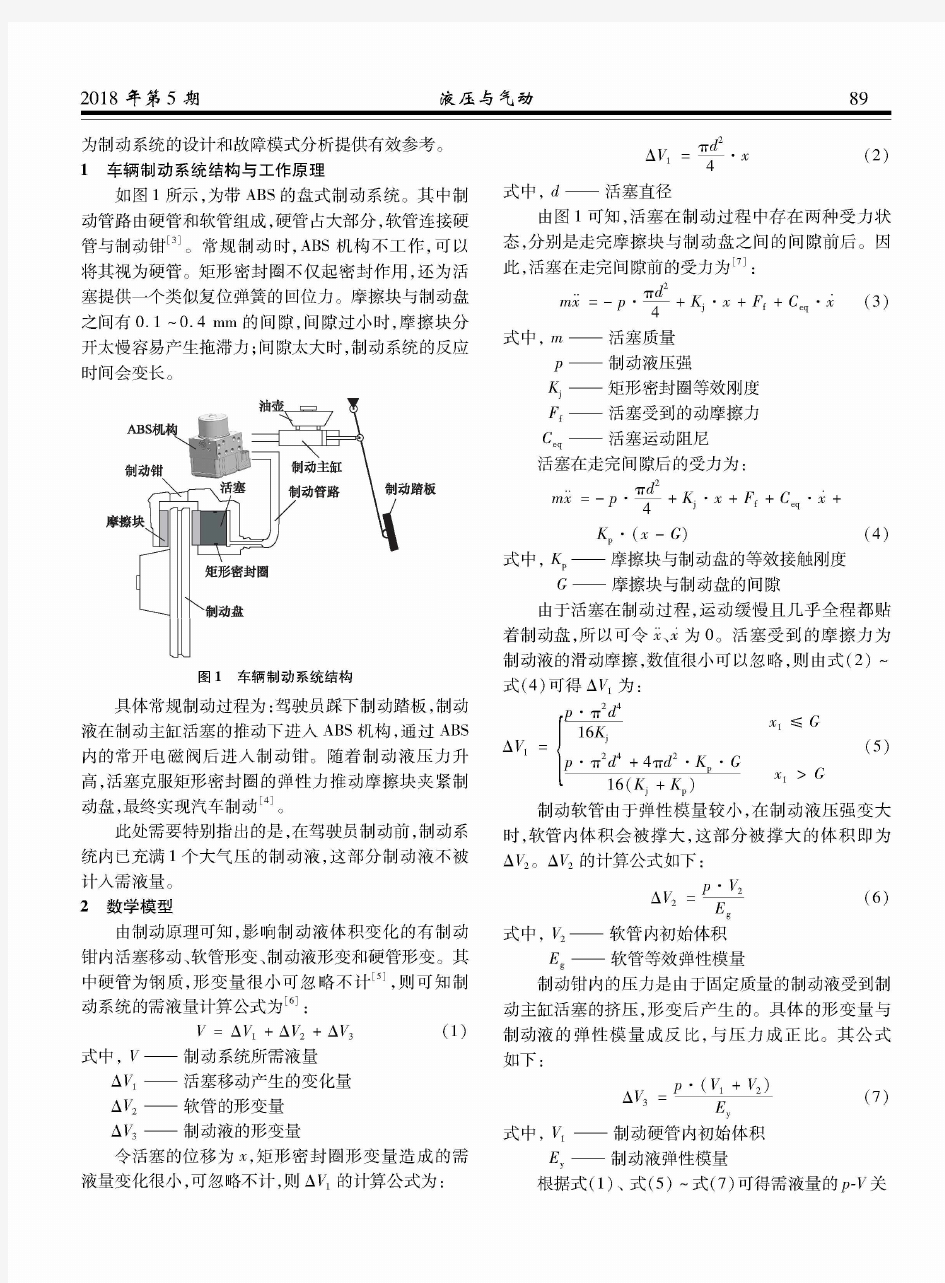
制动系统需液量指的是汽车在常规制动过程中卡 钼■内制动液达到一定压力时,从制动主缸泵出的制动 液体积[1]。需液量可以用制动液所需体积M随卡钳 内压力P变化的曲线图来表示。需液量不仅影响 驾驶员的制动踏板感[2],而且也是ABS(防抱死制动 系统)内零部件匹配设计的重要参考依据。目前,国内关于需液量的研究都只针对制动卡钳,针对制动系 统的需液量分析寥寥无几,且研究方法都是正向推导,即根据系统的详细参数搭建模型,然后做分析。这样 就需要对所研究的系统非常了解,且被忽略的部分存在不可控性。
本研究基于AMESim搭建盘式制动系统需液量模 型,利用AMESim的设计探索工具,在制动系统内部结 构参数未知的情况下,根据目标需液量,M图,寻找出 制动系统设计参数最优拟合值。通过改变模型中的相 关参数,对比输出结果,分析需液量的影响特征,从而
收稿日期:2018-1-10
基金项目:浙江省重点研发计划(2018C01058)
作者简介:王权(1988—),男,浙江江山人,工程师,硕士,主要从事ABS/ESP 制动系统研发工作。
新城市轨道交通车辆制动系统习题库
绪论 一、判断: 1、使运动物体减速,停车或阻止其加速称为制动。(×) 2、列车制动系统也称为列车制动装置。(×) 3、地铁车辆的常用制动为电空混合制动,而紧急制动只有空气制动。(√) 4、拖车空气制动滞后补充控制是指优先采用电气制动,不足时再补拖车的气制动(×) 5、拖车动车空气制动均匀补充控制是指优先采用电气制动,不足时拖车和动车同时补充气 制动(√) 6、为了保证行车安全,实行紧急制动时必须由司机按下紧急按钮来执行。(×) 7、轨道涡流制动能把列车动能转化为热能,且不受黏着限制,轮轨间没有磨耗。(√) 8、旋转涡流制动能把列车动能转化为热能,且不受黏着限制,轮轨间没有磨耗。(×) 9、快速制动一般只采用空气制动,并且可以缓解。(×) 10、制动距离和制动减速度都可以反映列车制动装置性能和实际制动效果。(√) 11、从安全的目的出发,一般列车的制动功率要比驱动功率大。(√) 12、均匀制动方法就是各节车各自承担自己需要的制动力,动车不承担拖车的制动力。(√) 13、拖车空气制动优先补足控制是先动车混合制动,不足时再拖车空气制动补充。(×) 14、紧急制动经过EBCU的控制,使BCU的紧急电磁阀得电而实现。(×) 二、选择题: 1、现代城市轨道交通车辆制动系统不包括(C)。 A.动力制动系统 B.空气制动系统 C.气动门系统 D.指令和通信网络系统 2、不属于制动控制策略的是(A)。 A.再生制动 B.均匀制动方式 C.拖车空气制动滞后补足控制 D.拖车空
气制动优先补足控制 3、直通空气制动机作为一种制动控制系统( A )。 A.制动力大小靠司机操纵手柄在制动位放置时间长短决定,因此控制不太精确 B.由于制动缸风源和排气口离制动缸较近,其制动和缓解不再通过制动阀进行, 因此制动和缓解一致性较自动制动机好。 C.直通空气制动机在各车辆都设有制动、缓解电空阀,通过设置于驾驶室的制动 控制器使电空阀得、失电 D.直通空气制动机是依靠制动管中压缩空气的压力变化来传递制动信号,制动管 增压时缓解,减压则制动 4、三通阀由于它和制动管、副风缸及制动缸相通而得名( B ) A.充气缓解时,三通阀内只形成以下一条通路:①制动管→充气沟i→滑阀室→副 风缸; B.制动时,司机将制动阀操纵手柄放至制动位,制动管内的压力空气经制动阀排 气减压。三通阀活塞左侧压力下降。 C.在制动管减压到一定值后,司机将制动阀操纵手柄移至保压位,制动管停止减 压。三通阀活塞左侧压力继续下降。 D.当司机将制动阀操纵手柄在制动位和保压位来回扳动时,制动管压力反复地减 压——保压,三通阀则反复处于冲压位。 5、城市轨道交通在运行过程中,乘客负载发生较大变化时,一般要求制动系统( B ) A.制动功率不变 B.制动率不变 C.制动力不变 D.制动方式不变. 6、下列不属于直通式空气制动机特点的是:(B) A.列车分离时不能自动停车B.制动管增压缓解,减压制动 C.前后车辆的制动一致性不好D.制动力大小控制不精确 7、下列制动方式中,不属于黏着制动的是:(C) A.空气制动B.电阻制动C.轨道涡流制动D.旋转涡流制动 8、下列制动方式中,属于摩擦制动的是:(A ) A.磁轨制动B.电阻制动C.再生制动D.轨道涡流制动 三、填空题:
汽车ABS系统的建模与仿真设计
基于Matlab/Simulink的汽车建模与仿真 摘要 本文所研究的是基于Matlab/Simulink的汽车防抱死刹车系统(ABS)的仿真方法,本方法是利用了Simulink所提供的模块建立了整车的动力学模型,轮胎模型,制动系统的模型和滑移率的计算模型,采用的控制方法是PID控制器,对建立的ABS的数学模型进行了仿真研究,得到了仿真的曲线,将仿真曲线与与没有安装ABS系统的制动效果进行对比。根据建立的数学模型分析,得到ABS系统可靠,能达到预期的效果。 关键词 ABS 仿真建模防抱死系统PID
Modeling and Simulation of ABS System of Automobiles Based on Matlab/Simulink Abstract A method for building a Simulator of ABS base on Matlab/Simulink is presented in this paper.The single wheel vehicle model was adopted as a research object in the paper. Mathematical models for an entire car, a bilinear tire model, a hydraulic brake model and a slip ratio calculation model were established in the Matlab/Simulink environment. The PID controller was designed. The established ABS mathematical model was simulated and researched and the simulation curves were obtained. The simulation results were compared with the results without ABS. The results show that established models were reliable and could achieve desirable brake control effects. Key words ABS; control; modeling; simulation;Anti-lock Braking System; PID
地铁车辆制动系统工作原理
地铁车辆制动系统工作原理 摘要:随着城市规模的快速发展和城市人口的不断增多,所面临的交通问题也越来越严重。本文对地铁车辆的制动功能设计进行了说明,并介绍了制动指令的相关设计,最后介绍了混合制动控制系统设计及相关控制策略,以供读者参考 关键词:地铁车辆;制动系统 随着我国经济建设的不断推进,近年来城市轨道交通快速发展,国内许多大型城市都已有了地铁或者轻轨,随着大量的轨道交通项目投入运营,人们的日常出行变得更加方便,可随之而来的担忧也困扰着人们:“我们经常乘坐的地铁会不会刹车失灵呢、会不会追尾呢?” 1.地铁车辆的制动功能设计 地铁车辆采用减速度控制模式,制动指令为电气指令,即制动系统根据电气减速度指令施加制动力。乘客通过站台固定区域上下车,因而地铁车辆每次停站位置要求准确无误,为满足此要求,ATO系统或司机根据停车距离给定列车减速度电气指令,地铁车辆制动过程中必须能够根据减速度指令快速施加相应制动力,即制动响应准确、迅速。 制动系统设有载荷补偿功能。由于城市轨道交通车辆载客量大,乘客上下频繁,因此要求制动过程中能够根据车辆载荷变化自动调整制动力,称之为载荷调整功能。 常用制动具有防冲动限制功能。制动指令是电气信号,制动指令变化瞬间可以完成,如果制动力跟随制动指令迅速变化,就可能造成冲动,引起乘客不适,而且常用制动需频繁施加,为减少制动时的冲动以避免制动力变化过快引起乘客不适,常用制动过程中需限制制动力的变化速率,称之为冲动限制功能。 2.制动系统功能 2.1常用制动 常用制动采用模拟电气指令方式,是由微处理器控制的直通式电空制动,它采用减速度控制模式,其制动力随输入指令大小无级控制,制动控制单元根据减速度指令和车辆实际载重来计算目标制动力,产生相应的减速度。常用制动具有冲击率限制功能,以改善乘坐的舒适性;常用制动采用空电混合制动并优先使用电制动,不足部分由空气制动补足,以尽可能减少空气制动的负荷。 2.2快速制动 当司机操作主控制器手柄使其处于快速制动位时快速制动被触发。快速制动是一种特殊的制动模式。快速制动与紧急制动的制动率相同。快速制动优先使用
详解四大驻车制动装置
现代汽车对于电子化的运用越来越广泛,驾校教练口中的“踩刹车、踩离合、脱空档、拉手刹”等等一些列各种组合与连续的动作,在高科技的参与下简化为了踩刹车和踩油门。这里面有很大一部分由自动变速器负责简化,剩下的就是小编今天要讲的刹车系统中的手刹、P 挡、电子手刹与自动驻车,来看看它们有啥区别? ●传统手刹 其实我们通常说的手刹专业称呼应该叫驻车制动器。与行车制动器(我们常说的脚刹)有所不同,从名字就能分辨出来,行车制动是在车辆行驶过程中短时间制动使车辆停稳或者减速的,而驻车制动是在车辆停稳后用于稳定车辆,避免车辆在斜坡路面停车时由于溜车造成事故。 工作原理及结构 手刹属于辅助制动系统,主要借助人力,一般在停车的时候,为了防止车辆自行溜车而设立的。手刹(驻车制动器)主要由制动杆,拉线,制动机构以及回位弹簧组成。是用来锁死传动轴从而使驱动轮锁死的,有些是锁死两只后轮。对于制动杆,其实就利用了杠杆原理,拉到固定位置通过锁止牙进行锁止。 而另一种是在变速器的后方,传动轴的前方,这种又叫做中央驻车制动器。制动原理大体相似,只是安装部位不同。 现在大多数乘用车都是采用四轮盘式制动器,其制动机构就集成在后轮的盘式制动器上。有些超级跑车的后制动盘上有两个卡钳,现在你知道为什么了吧。 如何使用手刹? 进行驻车制动时,踩下行车制动踏板,向上全部拉出驻车制动杆。欲松开驻车制动,同样踩下制动器踏板,将驻车制动杆向上稍微提起,用拇指按下手柄端上的按钮,然后将驻车制动杆放低到最低的位置。 优缺点 与手刹配套使用的还有回位弹簧。拉起手刹制动时,弹簧被拉长;手刹松开,弹簧回复原长。长期使用手刹时,弹簧也会产生相应变形。手刹拉线也同样会产生相应变形会变长。任何零件在长期、频繁使用时,都存在效用降低的现象。 不过这种手刹相对于后面要说到的几种驻车制动结构相对简单,成本低廉。 小结:传统的手刹驻车制动由于结构简单,成本低廉,在目前的汽车市场上还有很大一
汽车直线制动仿真计算与优化
传统制动系统的建模及仿真优化 1.1 汽车直线制动仿真计算理论基础 汽车直线制动时,对两轮接地点分别取距(图1-1),可得地面法向反作用力为 1()g z G b zh F L += (1-1) 2()g z G a zh F L -= (1-2) 式中,j z g =,1z F 、2z F 分别为路面对前后车轮的法向作用力;G 为汽车重量;a 、b 分别为质心至前后轴的距离;j 为汽车减速度;g h 为汽车质心高度;L 为汽车的轴距。 汽车理论制动力分配关系为 1(2)2r f g Gb F F h =+ (1-3) 式中,r F 为汽车后轴制动力;f F 为汽车前轴制动力。 1.1.1 制动力分配比 制动力分配比β为 f f r F F F β=+ (1-4) 1.1.2 直线制动的最佳制动力分配 设汽车前轮刚要抱死或者汽车前、后轮同时刚要抱死的减速度为du zg dt =,则 1u G du F Gz g dt ββ== 式中,z 为制动强度。 根据汽车理论,可知前、后轴的利用附着系数为 1()f g z b zh L β?=+ (1-5) (1)1()r g z a zh L β?-=- (1-6) 前后轴的附着效率为 f f g b L E h L ?β= - (1-7)
(1)r r g a L E h L ?β=-+ (1-8) 由于后轮先抱死容易发生后轴侧滑,是一种不稳定工况,故r f ψ??≤≤,由式(1-5)和式(1-6)可以得出制动力分配比的极限关系为 min min 1g g h h a b L Iz L Iz ??β??????+-≤≤+ ? ????? (1-9) 式中,min z 为整车应达到的最小制动强度。 利用不等式(1-9),可以确定0.2()0.8?≤≤湿滑路面(干燥路面) 的极限条件下,满载工况制动力分配比的允许范围。 1.2 优化设计 1.2.1 设计变量 将制动力分配比β作为设计变量,根据车辆制动系统设计经验可以取初值为00.4x =。 1.2.2 目标函数 附着系数在制动强度(z=0.2~0.8)范围内,应尽可能接近防止车轮抱死需要的附着系数,此时地面的附着条件发挥得越充分,汽车轴间制动力分配越好。在实际设计时,可以分别在满载与空载的利用附着系数与制动强度的差值平方和前乘以相应的权值。所以,当制动强度z 在0.2~0.8范围变化时,根据汽车满载时前轴和后轴的实际附着系数,利用曲线与理想曲线间差值平方和为最小建立目标函数,即 0.8220.2min ()()()f r z F z z β??=??= -+-??∑ (6-10) 1.2.3 约束条件 由于汽车在任何载荷情况下都要满足ECE 制动法规要求,根据ECE 制动法规和GB 12676—1999《汽车制动系统 结构、性能和试验方法》,对汽车制动力分配要求如下所述。 对于?=0.2~0.8之间的各种车辆,要求制动强度为 z ≥0.1+0.85(?-0.2) 当z>0.2时,有 10.070.85f z c ?+??=- ??? 当0.3 城市轨道交通车辆制动技术 题库 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII 1. 防滑控制系统主要由、和防滑动作机械部件组成。 2. 上海地铁基础制动装置采用制动机厂生产的。 3. BCU和BECU分别是和系统的缩写。 4. 上海地铁和广州地铁使用的电气指令制动控制系统为式电气指令式制动控制系统。 5. 模拟转换阀是上海地铁车辆KNORR制动系统中使用的一个电磁阀,它由三部分组成:电磁进气阀、和组成。 6. EP阀又称阀,是SD数字式制动控制单元中的一个转换阀。 7. 空压机的驱动电机一般有电机和电机。 8. 经空气压缩机压缩输出的空气压力单位,一般用bar来表示,1bar等于MPa。 9. 空气干燥塔可以将从空气压缩机输出的高压压缩空气中的和分离出去,以达到各用气系统对压缩空气的要求。 10. 空气压缩机组一般由、、、等装置组成。 11. 上海地铁knorr公司的空气压缩机,在进行压缩空气时一般经过两级冷却,分别为冷却和冷却。 12. 除空气制动系统用气外,城市轨道列车还有以下部件需要用到压缩空气:、、、等。 13. 空气压缩机组一般采用方式进行润滑。 14. 空气干燥器一般做成塔式的,有和两种。 15. 电阻制动所采用的制动电阻,材料一般采用合金带钢条,这种合金带钢条不仅具有稳定的,而且具有相当大的。 16. 再生制动失败,列车主电路会自动切断反馈电路转入制动电路。 17. 直流斩波器按列车控制单元及制动控制单元的指令,不断调节斩波器的,无级、均匀地控制,使制动力和再生制动电压持续保持恒定。 18. 电动车组中既有动车又有拖车,拖车没有电动机,只能使用制动,动车带有电动机,可以进行制动。 19. 一般列车在高速时,常用制动都先从制动开始,最后在列车10km/h 以下低速时,由制动将车停止。 20. 动轮与钢轨间切向作用力的最大值与物理学上的最大静摩擦力相比要(大or小)一些,情况要更复杂一点,其主要原因是由于的存在所导致。 21. 伴随着蠕滑产生静摩擦力,轮轨之间才能传递。 22. 一般城市轨道车辆的制动方式主要有三类:、和电磁制动。 23. 电磁制动有两种形式:和。 24. 轮对在钢轨上运行,一般承受载荷、载荷和载荷。 25. 城市轨道交通系统都有明确的车辆运行规程,对于列车制动能力,上海地铁规定,列车在满载乘客的条件下,任何运行速度时,其紧急制动距离不得超过米。 26. 现代城市轨道车辆的制动系统一般都应该具有以下组成部分:、和。 27. 城市轨道车辆制动技术正朝着、、和的目标不断前进。 28. 最近几十年来,制动技术取得了很大进展,出现使电气再生制动成为可能,使制动防滑系统更加精确完善。 电子驻车制动系统的开发及应用 作者:见下文来源:上海汽车日期:2011年10月刊 辛登岭张建明 上海大众汽车有限公司 【摘要】介绍电子驻车制动(EPB)系统的架构及组成部件、系统的网络结构以及它们之间的信息通信,EPB 的主要功能及试验评价。最后探讨了EPB系统的发展和应用前景。 关键词:电子驻车制动系统电子稳定程序起步辅助Autohold自动停车紧急制动 0 引言 随着汽车在中国的普及,汽车公司更加关注提高顾客驾驶的舒适性和安全性,目前电子驻车制动(EPB)系统在B级车得到普遍应用。EPB系统的应用可以使汽车内部空间的利用和中央通道/脚部空间的设计具有更大的灵活性;可以为顾客提供有助的舒适性功能;由于取消了手制动手柄和拉索,简化了装配过程;它是机电一体化的产品,系统的功能始终处于监控状态。本文主要介绍EPB系统及其主要功能和评价指标。 1 系统架构 图1描述EPB系统的架构,EPB系统主要由电子稳定程序(ESP)控制器、EPB控制器,带有执行电机的后制动钳总成、EPB/自动停车开关,离合器传感器(仅用于手动档)等组成。 它们通过驱动总线与发动机控制器、变速器控制器、安全气囊控制器、组合仪表、网关、门传感器进行通信。 1.1 ESP控制器 ESP控制器是EPB系统的关键部分之一,它集成了纵向和横向加速度传感器。它不但向EPB系统提供车速信号、纵向加速度信号、坡度信号,还提供自动停车和紧急制动功能的控制。 有些ESP和EPB的组合系统,纵向和横向加速度传感器集成在EPB控制器内,如果ESP控制器需要这些信号则通过总线从EPB控制器中取得。 相对于没有EPB装备的ESP控制器,除了软件的不同外,硬件也需要更改。需要多使用两个Pin角,一个与自动停车的开关相连,另一个用于控制自动停车功能的指示灯。 1.2 EPB控制器 EPB控制器是EPB系统的控制核心部件。和ESP控制器一样,它可以集成纵向和横向加速度传感器,也可以从ESP控制器中取得这些信号。两者之间通过总线通信。 它由蓄电池直接供电,与执行电机、EPB开关、离合器传感器之间通过硬线连接,与其它控制器的信息通信通过总线。图2为EPB控制器的Pin角定义图。 汽车智能制动系统的数学建模与MATLAB仿真 摘要 本文主要以汽车制动为研究对象,通过分析车辆动力学模型、轮胎模型、制动系统模型和控制系统模型,从而获得汽车的智能制动系统的数学模型,然后在Matlab/Simulink中建立各个模型的子系统,并将他们组装成汽车的智能制动系统的Simulink仿真模型。本文中汽车智能制动系统的控制方法采用了模糊神经网络优化的PID控制,没有选用传统的逻辑门限方法。本文利用汽车智能制动系统的Simulink仿真模型,研究了在不同路面上智能制动系统对汽车制动性能的影响。 关键词:智能制动系统;Simulink仿真;控制方法;滑移率;模糊神经网络 Abstract: Key: 绪论 汽车安全系统主要分为两个方面,一是主动安全系统,另外一方面是被动安全系统。所谓主动安全,就是避免事故的发生,主动安全性的好坏决定了汽车发生事故的概率;而被动安全则是在发生事故时汽车对车内成员的保护或对被撞车辆或行人的保护,被动安全性的好坏主要决定了事故后车内成员的受伤严重程度。汽车制动系统就是汽车行驶的一个非常重要的主动安全系统,其性能的好坏对汽车的行驶安全有着重要的影响。 汽车的制动性是指汽车行驶时能在短距离内停车且维持行驶方向稳定性和在下长坡时能维持一定车速的能力。汽车的制动性主要由制动效能、制动效能的恒定性和制动时汽车的方向稳定性三方面来评价。汽车防抱制动系统(ABS)是一种主动安全装置,它从防止制动过程中车轮抱死的角度出发,避免车辆后轮侧滑和前轮丧失转向能力,提高车辆对地面附着能力的利用率,从而达到改善车辆制动稳定性、操纵性和缩短制动距离等目的。 目前,ABS开发模式有传统实车开发和基于计算机仿真两种。在传统ABS开发模式中,ABS 控制规律依靠大量实车道路试验,不但需要大量人力、物力、而且开发周期较长。通常确定的控制参数只适用于某一具体车型,互换性不好,开发出的ABS产品在装到其他车型上时,需要再次进行道路试验,延长了开发周期、增加了成本。但是随着计算机技术的快速发展,利用计算机仿真模拟车辆制动过程,探索控制方法,已成为可能。基于计算机仿真的ABS开发,把实车实验安排到开发最后阶段,绝大部分工作通过计算机仿真完成,缩短了开发时间, 新能源汽车电制动简述 概述:全文共5部分。第一部分,纯电动汽车制动系统概述,主要介绍电动真空助力系统的主要组成元件和工作原理;第二部分,混合动力汽车制动系统,主要介绍混合动力汽车电子制动控制系统的主要组成元件和工作原理;第三部分,制动能量回收系统,主要介绍制动能量回收系统的原理和能量回收模式;第四部分,拓展知识,主要介绍EMB电子机械制动系统、brake-by-wire的发展简介;第五部分,案例,主要介绍本田第四代IMA混合动力系统的制动能量回收系统控制;第六部,传统汽车刹车系统,主要介绍鼓式和盘式刹车。 一、纯电动汽车制动系统 纯电动汽车采用的液压制动系统与传统汽车基本结构区别不大,但是在液压制动系统的真空辅助助力系统和制动主缸两个部件上存在较大的差异。 绝大多数的汽车采用真空助力伺服制动系统,人力和助力并用。真空助力器利用前后腔的压差提供助力。传统汽车真空助力装置的真空源来自于发动机进气歧管,真空度负压一般可达到0.05~0.07MPa。对于纯电动汽车由于没有发动机 总成即没有了传统的真空源,仅由人力所产生的制动力无法满足行车制动的需要,通常需要单独设计一个电动真空泵来为真空助力器提供真空源。这个助力系统就是电动真空助力系统,即EVP系统(Electric Vacuum Pump,电动真空助力)。1 所示,电动真空助力系统由真空泵、真空罐、真空如图1整车控制器里)以及与传统汽车相泵控制器(后期集成到VCU 电源组成。12V同的真空助力器、电动真空助力系统的工作过程为:当驾驶员起动汽车时,车辆电源接通,控制器开始进行系统自检,如果真空罐内的真空度小于设定值,真空罐内的真空压力传感器输出相应电压信号至控制器,此时控制器控制电动真空泵开始工作,当真空度达到设定值后,真空压力传感器输出相应电压信号至控制器,此时控制器控制真空泵停止工作。当真空罐内的真空度因制动消耗,真空度小于设定值时,电动真空泵再次开始工作,如此循环。(一)电动真空助力系统的主要组成元件以下介绍电动真空助力系统的主要组成元件。 1)真空泵(真空泵是指利用机械、物理、化学或物理化学的方法对被抽容器进行抽气而获得真 一、驻车制动系统工作原理 驻车制动系统主要由驻车制动手柄、驻车制动器、连接二者的杠杆和拉索等组成。 驻车制动器可以是独立的,也可以与行车制动器共用。如果是独立的驻车制动器,一般布置在变速器之后,万象传动装置之前,可以用鼓式制动器,也可以用盘式制动器。如果与行车制动器共用,一般是在后轮制动器上增加一套机械操纵机构,用制动手柄控制。 二、部件图 手制动阀部件图 更换 1、将制动系统泄压 2、拆卸中平台后部总成, 3、拆卸手动阀总成 1)拆卸手动阀气管接头 螺母,分离手制动阀 气管。 注意: 使用油管扳手拆卸。 提示: 在断开气管之前要对 气管进行标记处理, 安装是方便识别。 2)拆卸手动阀固定螺栓, 取下手制动阀总成。 4、安装手动阀总成 1)安装手制动阀螺栓。 扭矩:23 N.m 2)连接手制动阀气管安 装手动阀气管接头螺 母。 注意: 使用油管扳手安装。 5、安装中平台后部总成 三、注意事项 1、驻车制动系统操作注意事项 1)小心正确更换每个零件,否则将影响驻车制动系统的性能,并可能危及人身安全。 2)务必使用原厂纯正配件。 3)保持零件和维修场地清洁。 4)务必定期检查,每行驶10000 Km 必须检查驻车制动系统功能是否正常。 四、驻车系统常见故障及排除方法 故障现象表 五、检测与调整 1、驻车制动器检查 1).操作检查 ?将车辆停放在干燥的斜坡上。挂上驻车制动器,驻车制动器必须能够使车辆保持不动。 ?上拉制动杆。检查弹簧室发挥作用时(制动力加在后轮上),是否有排气声音。 ?将释放手柄向制动杆顶端的手柄处推压,放下制动杆。 ?检查报警灯的工作情况。 制动系统建模、仿真及A B S控制器设计 目录 1. 动力学建模........................................................................................ - 0 - 2. 分段线性的轮胎模型 ....................................................................... - 0 - 3. 控制算法............................................................................................ - 1 - 4. 仿真流程及参数输入 ....................................................................... - 1 - 5. 实例分析............................................................................................ - 2 - 6. MATLAB 仿真过程.......................................................................... - 3 - 6.1.逻辑门限值控制器................................................................... - 3 - 6.2.模糊控制器............................................................................... - 7 - 6.2.1模糊控制器设计............................................................. - 7 - 6.2.2模糊控制matlab仿真过程 ............................................ - 8 - 6.3.PID控制器 ............................................................................. - 13 - 目录 1. 动力学建模....................................................................................... - 1 - 2. 分段线性的轮胎模型 ...................................................................... - 1 - 3. 控制算法........................................................................................... - 2 - 4. 仿真流程及参数输入 ...................................................................... - 2 - 5. 实例分析........................................................................................... - 3 - 6. MATLAB 仿真过程......................................................................... - 3 - 6.1.逻辑门限值控制器 ................................................................... - 3 - 6.2.模糊控制器 ............................................................................... - 7 - 6.2.1模糊控制器设计 .............................................................. - 7 - 6.2.2模糊控制matlab仿真过程 ............................................. - 8 - 6.3.PID控制器.............................................................................. - 12 - 详解四大驻车制动装置 现代汽车对于电子化的运用越来越广泛,驾校教练口中的“踩刹车、踩离合、脱空档、拉手刹”等等一些列各种组合与连续的动作,在高科技的参与下简化为了踩刹车和踩油门。这里面有很大一部分由自动变速器负责简化,剩下的就是小编今天要讲的刹车系统中的手刹、P 挡、电子手刹与自动驻车,来看看它们有啥区别? ●传统手刹 其实我们通常说的手刹专业称呼应该叫驻车制动器。与行车制动器(我们常说的脚刹)有所不同,从名字就能分辨出来,行车制动是在车辆行驶过程中短时间制动使车辆停稳或者减速的,而驻车制动是在车辆停稳后用于稳定车辆,避免车辆在斜坡路面停车时由于溜车造成事故。 工作原理及结构 手刹属于辅助制动系统,主要借助人力,一般在停车的时候,为了防止车辆自行溜车而设立的。手刹(驻车制动器)主要由制动杆,拉线,制动机构以及回位弹簧组成。是用来锁死传动轴从而使驱动轮锁死的,有些是锁死两只后轮。对于制动杆,其实就利用了杠杆原理,拉到固定位置通过锁止牙进行锁止。 而另一种是在变速器的后方,传动轴的前方,这种又叫做中央驻车制动器。制动原理大体相似,只是安装部位不同。 现在大多数乘用车都是采用四轮盘式制动器,其制动机构就集成在后轮的盘式制动器上。 有些超级跑车的后制动盘上有两个卡钳,现在你知道为什么了吧。 如何使用手刹? 进行驻车制动时,踩下行车制动踏板,向上全部拉出驻车制动杆。欲松开驻车制动,同样踩下制动器踏板,将驻车制动杆向上稍微提起,用拇指按下手柄端上的按钮,然后将驻车制动杆放低到最低的位置。 优缺点 与手刹配套使用的还有回位弹簧。拉起手刹制动时,弹簧被拉长;手刹松开,弹簧回复原长。长期使用手刹时,弹簧也会产生相应变形。手刹拉线也同样会产生相应变形会变长。任何零件在长期、频繁使用时,都存在效用降低的现象。 基于MAT LAB 的汽车制动系统 3 设计与分析软件开发 孙益民(上汽汽车工程研究院 【摘要】根据整车制动系统开发需要, 利用MAT LAB 平台开发了汽车制动系统的设计和性能仿真软件。 该软件用户界面和模块化设计方法可有效缩短开发时间, 提高设计效率。并以上汽赛宝车为例, 对该软件的可行性进行了验证。 【主题词】制动系汽车设计 统分成两个小闭环系统, 使设计人员更加容易把 1引言 制动性能是衡量汽车主动安全性的主要指标。如何在较短的开发周期内设计性能良好的制动系统一直是各汽车公司争相解决的课题。 本文拟根据公司产品开发工作需要, 利用现有MA T LAB 软件平台, 建立一套面向设计工程师, 易于调试的制动开发系统, 实现良好的人机互动, 以提高设计效率、缩短产品开发周期。 握各参数对整体性能的影响, 使调试更具针对性。 其具体实施过程如图1所示。 3软件开发 与图1所示的制动系统方案设计流程对应, 软件开发也按照整车参数输入、预演及主要参数确定, 其他参数确定和生成方案报告4个步骤实现。3. 1车辆参数输入 根据整车产品的定位、配置及总布置方案得出空载和满载两种条件下的整车质量、前后轴荷分配、质心高度, 轮胎规格及额定最高车速。以便获取理想的前后轴制动力分配及应急制动所需面临的极限工况。 3. 2预演及主要参数确定 在获取车辆参数后, 设计人员需根据整车参数进行制动系的设计, 软件利用MAT LAB 的G U I 工具箱建立如图2所示调试界面。左侧为各主要参数, 右侧为4组制动效能仿真曲线, 从曲线可以查看给定主要参数下的制动力分配、同步附着系数、管路压力分配、路面附着系数利用率随路况的变化曲线, 及利用附着系数与国标和法规的符合现制动器选型、性能尺寸调节, 查看液压比例阀、感载比例阀、射线阀等多种调压工况的制动效能, 并通过观察了 2汽车制动系统方案设计流程的优化 从整车开发角度, 制动系统的开发流程主要包括系统方案设计、产品开发和试验验证三大环节。制动系统的方案设计主要包含结构选型、参数选择、性能仿真与评估, 方案确定4个环节。以前, 制动系统设计软件都是在完成整个流程后, 根据仿真结果对初始设计参数修正。因此, 设计人员往往要反复多次方可获得良好的设计效果, 而且, 在调试过程中, 一些参数在特定情况下的相互影响不易在调试中发现, 调试的尺度很难把握。 本文将整车设计流程划分为两个阶段:主要参数的预演和确定、其他参数的预演和参数确定。即根据模块化设计思想, 将原来一个闭环设计系 收稿日期:2004-12-27 3本文为上海市汽车工程学会2004年(第11届学术年会优秀论文。 我国城轨车辆制动系统介绍及选型 吕晓晖 (中国北方机车车辆工业集团,266031,青岛∥高级工程师) 摘 要 介绍了日本N A BCO、德国K N O RR和英国WEST IN G HO US E制动系统控制装置的组成、工作原理及在我国各地城轨车辆上的应用。提出了选用城轨车辆制动系统需注意的几个方面:在保证安全性的同时,尽量减少制动系统的运用。应考虑制动控制系统的寿命周期成本;在选用城轨制动控制系统时,需要研究其零部件维修的可能性,而不是自始至终从国外购买整机。 关键词 城轨车辆;制动控制系统;电空制动 中图分类号 U260.352 Selection of Vehicle Brake System in C hina Lv Xiaohui A bstract Compar ed with the br ake systems in Japan, Ge mar y and UK(NABCO,KNORR and Westing House), the com position and func tions of the contempor ar y urban ra il vehicle bra ke syste m adopted in China's ur ban r ail tra nsit ar e introduced,meanwhile suggestions and analysi s are pr ese nted on the selec tion of ur ban r ail vehicle br ake system.The auther ar gues that a fe asibility study on br ake parts maintenance should be car ried out be fore the pur chase of the wh ole car body f rom abr oud. Key words urban r ail vehicle;br ake contr ol syste m; elec tropne uma tic br ake Author's address Chinese Norther n Loco.and Ca r I ndustr ial Gr oup,266031,Qingdao,China 城轨车辆制动系统的整体使用寿命要求20~30年,是影响城轨车辆安全性和寿命成本最重要的因素之一。本文介绍了当前我国城轨车辆主要选用的制动系统,从组成、功能和原理上进行了剖析,以便于城轨车辆制动系统的选用及维护。 1 城轨车辆制动系统介绍 目前我国城轨车辆主要选用国外进口的制动系统,主要包括日本NABCO制动系统、德国KNORR 制动系统、英国WES TING HO US E制动系统和SABWABCO(FAIVELEY)制动系统。以上均属于当今主型的模拟式直通电空制动系统,具有反应快速、操纵灵活,以及与牵引、TCMS(列车控制管理系统)和A TC等系统协调配合等特点。由于不同制动系统的风源和基础制动单元差别不大,下面主要对这些制动系统的控制系统或单元进行介绍。 1.1 日本NABC O制动系统 日本NABCO制动系统主要指NABCO的H RDA型电空制动系统,1992年投入应用,是一种传统的直通电空制动系统。在我国,该电空制动系统主要应用于北京和天津的城轨项目。 H RDA型电空制动系统的制动控制单元包括制动电子控制装置和气动控制装置两部分:电子控制装置为贮有定制程序的标准机箱,气动控制装置主要由电空中继阀、空重车调整阀和气路板等组成。制动控制单元的原理框图如图1所示。 如图2所示,制动电子控制装置和气动控制装置同装于一个制动控制箱内。制动控制箱外形尺寸为710mm×615mm×590m m,总重100kg。 1.1.1 制动电子控制装置 H RDA型电空制动系统的电子控制装置整体结构采用6U标准机箱,主要芯片采用日本日立公司的H8系统微控制器。该电子控制装置主要包括制动控制、防滑控制、通信及显示三个部分。 制动控制部可接收列车制动控制线的PWM 制动指令,进行空气和电制动的混合制动计算,控制电空中继阀上电空转换(EP)阀的电流,实现对制动缸的预控压力控制;同时,电子控制装置又根据两路空气弹簧压力(AS1、AS2)对预控压力按载荷进行自动调整,通过气动控制装置实现对制动力的控制。 防滑控制部可以测定各车轴的速度,一旦检测到有车轮滑行,便控制防滑阀降低滑行轴的制动缸压力,使滑行车轮恢复到正常的粘着状态。 通信及显示部用于与TM S通信及故障诊断信息的显示与存贮。 · 56· 电子驻车制动系统 由控制单元控制的电子驻车制动系统简称为EPB 系统。EPB 系统去掉了普通机械式驻车制动系统的手柄或是踏板等机械装置,通过一个 EPB 开关对驻车制动器进行控制,该系统不仅实现了驻车制动的电子化控制,同时 EPB控制单元通过数据总线与 ESP 系统链接,可以实现车辆的自动停止固定功能和动态的应急制动。现代车辆上装配的电子驻车制动系统有两种形式,一种是通过驻车制动执行电机驱动制动拉线使驻车制动系统工作的鼓式电子驻车制动系统。另外一种是将驻车制动执行电机安装于后轮两侧的制动卡钳上,由驻车制动执行电机控制制动卡钳的活塞。前者装配于宝马 7 系的 E65/E66 车型和韩国现代的新雅科仕车型上,后者多见于奥迪车系,而韩国现代于 2011 年中上市的新雅尊HG 车型也装配了类似的 EPB 系统。这两种电子驻车制动系统虽然在结构上有很大的区别,但是其基本的功能和控制方式却是很相像的,现就这两种系统的结构和工作原理做一简要分析。 一、基本功能 1. 静态驻车制动:车辆在停止时,按下 EPB 开关(无论点火开关是ON 或 OFF,以及行车制动的状态),EPB 系统工作制动锁止车辆。释放驻车制动时,点火开关处于 ON 位置(发动机工作或熄火均可),踩下行车制动踏板,拉起 EPB 开关,EPB 系统停止制动锁止。当然如果车辆的发动机盖和后备箱盖以及 4 个车门都是OFF 状态时,变速器杆从 P 位移到 R 位或 D 位时,EPB 系统也会自动释放。 2. 动态应急制动:车辆在行驶过程中,驾驶员按下 EPB 开关,EPB控制单元收到开关信号后通过数据总线要求 ESP 系统控制行车制动,如果行车制动系统或是 ESP 系统故障,由EPB 控制单元直接控制驻车制动系统工作(仅限于后轮)来应对这种紧急情况。EPB 系统的动态制动控制是持续进行的,直到松开 EPB 开关为止。在动态制动工作期间,驻车制动警告灯将会一直闪烁。 3. 自动车辆固定(AVH)功能:也称制动力自动保持,由 ESP 系统实现该功能的控制。主要是为了应对车辆由于路面交通信号使车辆在 D 挡停止时对车轮进行液压制动的控制。也同时是为了保证车辆在上坡起步时车辆不会后移,在部分欧洲车上该功能可以通过操作显示器的菜单或是使用诊断仪激活或是取消该功能。但是在韩国现代汽车上则专门设计有这样一个被称为 AVH 的开关,操作这个开关就可以随时的激活或取消该功能。当自动车辆固定功能被激活时,车辆在遇到路面交通信号灯停止后,即使驾驶员不踩制动踏板,车辆也会被 ESP 控制单元的控制而制动,同时制动灯继电器被闭合,制动灯点亮。在自动车辆固定控制期间,如果踩下加速踏板时,制动系统会释放,车辆就可以行驶。如果车辆在自动车辆固定控制期间发动机 OFF,发动机盖 ON,后备箱盖 ON 或车门 ON时,系统将自动从自动车辆固定模式转变为 EPB 控制单元控制的驻车制动模式。或者在当前驾驶周期内自动车辆固定的模式持续工作 5min 以上,以及在当前的驾驶周期内累计工作 30min 以上,或是车辆停止的坡度超过 21°时,系统也会从自动车辆固定控制模式转换为 EPB 系统控制的驻车制动模式。这样的目的主要是为了防止 ESP 模块中的电磁阀因长时间工作而过载(在韩现雅科仕轿车和新雅尊 HG 轿车上,当按下自动车辆固定的 AVH 开关时,仪表上会有一个白色的 AUTO HOLD 的指示灯点亮,表示系统进入车辆自动固定的准备阶段,在系统工作期间,一个绿色的 AUTO HOLD 灯就会点亮,表示自动车辆固定模式当前处于工作状态,如果自动车辆固定 88液%与气(2018年第5期 doi:10.11832/j.issn.1000-4858.2018. 05.015 车辆制动系统需液量仿真分析 王权,刘伟,张致兴,吴志强,张杰,陈颖 (万向钱潮股份有限公司钱潮技术中心,浙江杭州311200) 摘要:需液量是制动系统关键性设计参数,目前关于制动系统需液量的研究缺乏理论和仿真依据。 通过解析车辆制动系统的结构和工作原理,推导需液量关于制动液压强的数学公式,并基于AMESim的设计 探索工具,搭建可自寻优的需液量仿真模型。根据实测数据寻找制动系统仿真模型的最优参数拟合值,并利 用自寻优出的模型对制动系统需液量的影响因素进行仿真分析。结果表明,该模型可根据目标需液量反向 推导出制动系统的关键设计参数,并用以模拟制动系统的需液量分析,为制动系统的设计和故障诊断提供参 依。 关键词:制动系统;需液量;AMESim#自寻优;影响因素 中图分类号:TH137 文献标志码:B文章编号=1000-4858(2018)05-0088-05 Simulation Analysis for Required Fluid Amount of Automobile Brake System WANGQuan,LIUWei,ZHANG Zhi-xing,WUZhi-qiang,ZHANGJie,CHENYing (W an xian g Q ian ch ao C o.,Ltd.,T ech n o lo gy C enter,H an gzhou,Z hejiang311200) Abstract:The required fluid amount is a key design parameter for brake system.At present,there i oretical and simulation bases for tlie research on required fluid amount.By the analysis of automobil structure and work principle,a hydraulic pressure mathematical formula for required fluid amount is d self-optimization simulation model is built by the design exploration tool of AMESim.According to the measured da- ta,we find the optimal parameter of brake system simulation model.Then the influence factors of require m ount for brake s ystem are analyzed by the self-optimization model.The results show that through the modified model,we can deduce the key design parameters of brake system according to the target required fluid amount.It is used to simulate the required fluid amount of brake system and provide a basis for d brake?y?tem. Key words:brake system,required fluid amount,AMESim,self-optimization,influence factors 引言 制动系统需液量指的是汽车在常规制动过程中卡 钼■内制动液达到一定压力时,从制动主缸泵出的制动 液体积[1]。需液量可以用制动液所需体积M随卡钳 内压力P变化的曲线图来表示。需液量不仅影响 驾驶员的制动踏板感[2],而且也是ABS(防抱死制动 系统)内零部件匹配设计的重要参考依据。目前,国内关于需液量的研究都只针对制动卡钳,针对制动系 统的需液量分析寥寥无几,且研究方法都是正向推导,即根据系统的详细参数搭建模型,然后做分析。这样 就需要对所研究的系统非常了解,且被忽略的部分存在不可控性。 本研究基于AMESim搭建盘式制动系统需液量模 型,利用AMESim的设计探索工具,在制动系统内部结 构参数未知的情况下,根据目标需液量,M图,寻找出 制动系统设计参数最优拟合值。通过改变模型中的相 关参数,对比输出结果,分析需液量的影响特征,从而 收稿日期:2018-1-10 基金项目:浙江省重点研发计划(2018C01058) 作者简介:王权(1988—),男,浙江江山人,工程师,硕士,主要从事ABS/ESP 制动系统研发工作。城市轨道交通车辆制动技术题库
电子驻车制动系统的开发及应用
汽车智能制动系统的数学建模与MATLAB仿真综述
完整版新能源汽车电制动简述
驻车制动系统
制动系统建模、仿真及ABS控制器设计word版本
制动系统建模、仿真及ABS控制器设计
详解四大驻车制动装置
基于MATLAB的汽车制动系统设计与分析软件开发.
我国城轨车辆制动系统介绍及选型_吕晓晖
电子驻车制动系统
车辆制动系统需液量仿真分析