四维空间球极投影与霍普夫纤维丛具体算法实现
四维空间球极投影与霍普夫纤维丛具体算法实现
作者Wxy
本文是一篇根据一部数学科普CG电影《维度:数学漫步》[1]对四维空间与霍普夫纤维丛的讲解基础上,讲解如何在支持3D软件编程下绘制出霍普夫纤维丛的算法,实现绘制《维度:数学漫步》影片上所展示的图形。
球极投影(Stereographic Projection)
首先,我们来看一下三维空间中球极投影的公式:设一个球心在原点的半径=R的球。设投影极点为(0,0,1),投影平面:z=-1
我们不难得出:给一球面上的点(x0,y0,z0),它在投影平面:z=-1上投影坐标为: x = -((2*x0)/(-2+R*R+R*z0));
y = -((2*y0)/(-2+R*R+R*z0));
这是一段伪代码:
function stgpro(x0,y0,z0) {
x = -((2*x0)/(-2+R*R+R*z0));
y = -((2*y0)/(-2+R*R+R*z0));
return [x, y, -1];
}
如果要画一个正多面体的球极投影,得先把它“膨胀”到球心在原点的球面上:
function proSphere(x0,y0,z0) {
l = Math.sqrt(x0*x0+y0*y0+z0*z0);
return [R*x0/l, R*y0/l, R*z0/l];
}
而通过类比的思想,我们可以得出四维空间球极投影公式:
x = -((2*x0)/(-2+R*R+R*t0));
y = -((2*y0)/(-2+R*R+R*t0));
z = -((2*z0)/(-2+R*R+R*t0));
function stgpro4D(x0,y0,z0,t0) {
x = -((2*x0)/(-2+R*R+R*t0));
y = -((2*y0)/(-2+R*R+R*t0));
z = -((2*z0)/(-2+R*R+R*t0));
return [x, y, z, -1];
}
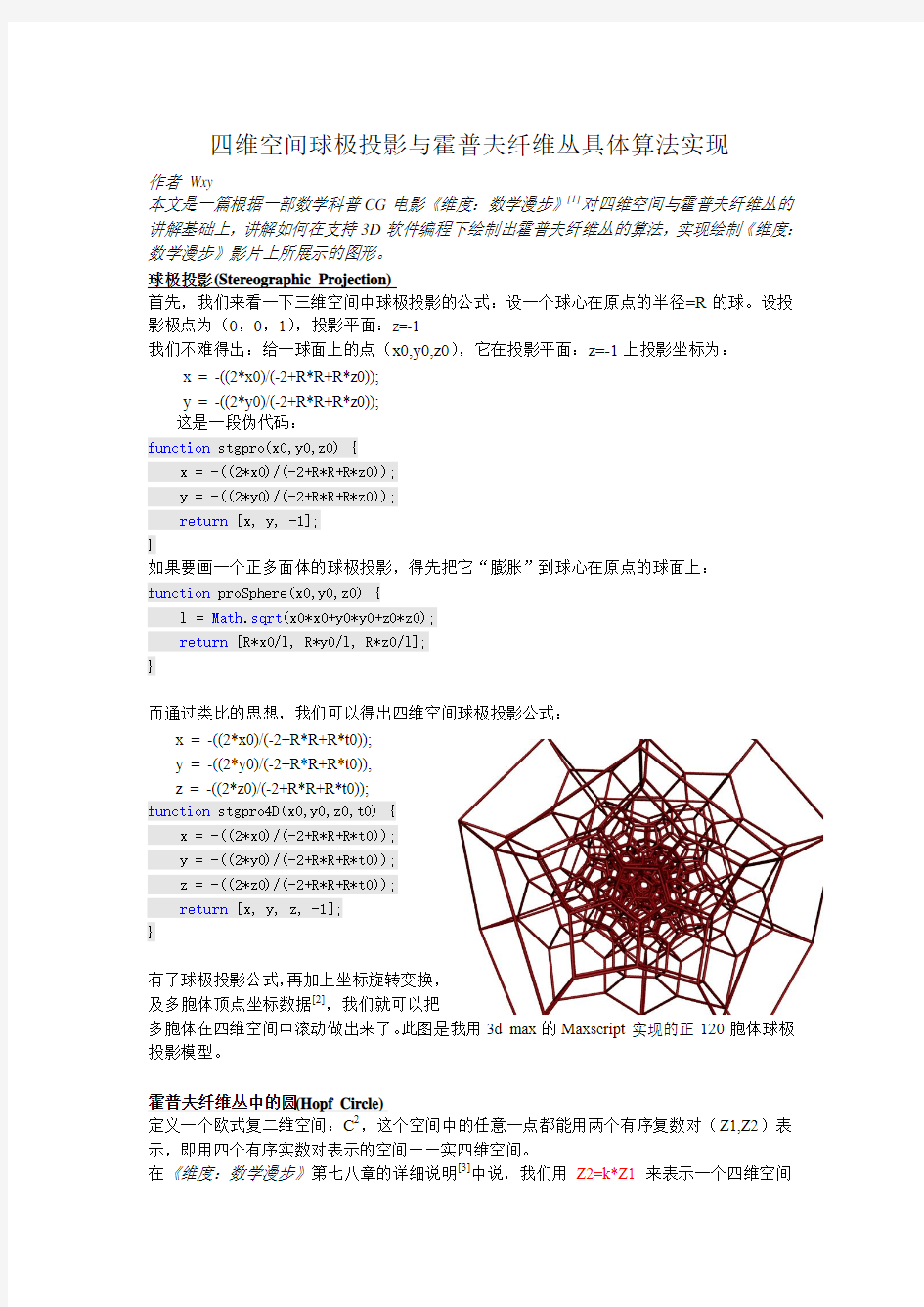
有了球极投影公式,再加上坐标旋转变换,
及多胞体顶点坐标数据[2],我们就可以把
多胞体在四维空间中滚动做出来了。此图是我用3d max的Maxscript实现的正120胞体球极投影模型。
霍普夫纤维丛中的圆(Hopf Circle)
定义一个欧式复二维空间:C2,这个空间中的任意一点都能用两个有序复数对(Z1,Z2)表示,即用四个有序实数对表示的空间——实四维空间。
在《维度:数学漫步》第七八章的详细说明[3]中说,我们用Z2=k*Z1来表示一个四维空间
里的二维平面。(但注意用Z2=k*Z1并不能表示所有过原点的二维平面,比如xOz坐标面就不能写成这样的形式,能写成Z2=k*Z1的过原点平面是很特殊的,所以我们不能用此方法直接研究一般情形的平面,但我们用这些特殊的平面来截S3已足够了,因为它们所截得的圆周两两不相交)
所以只要给定一个k,就给定了一个二维平面,而这个二维平面与S3相交出来的圆周就确定了。现在我们要解决的是给一个k值,我们该如何让程序找到这个交出来的圆,并球极投影到我们的三维空间当中,把这个圆周描出来。
首先,设k=a+bi Z1=x+yi Z2=z+ti
则我们得到:
z=ax-by
t=ay+bx
将这两个式子与S3联立:x2+y2+z2+t2=1
我们即可以得出这个圆周在四维空间中的方程:
做一下整理,可得:
x2+y2=1/(1+a2+b2)
从这个式子中我们可以发现,给定一个复数k=a+bi,我们即定义了一个四维空间当中的过圆心的圆周,而且已知圆周上的一点的一个坐标分量(如x),根据方程我们就可以解出其余的坐标(y,z,t坐标值)而我们正是想让计算机来把圆周上的点描出来。怎样来选取圆周上的点呢?
可以考虑转换成参数方程:引入一个角θ(0≤θ≤2π)
令x = cosθ/sqrt(1+a2+b2),则y = sinθ/sqrt(1+a2+b2),又因为z=ax-by,t=ay+bx,我们就可以把这个圆在四维空间中描出来了。
function drawcircles(k) {
a = k[0];//get the value of Re k
b = k[1];//get the value of Im k
var x, y, z, t;
for(var i=0;i<=Math.PI*2;i+= Math.PI/20){
r = Math.sqrt(1+a*a+b*b);
x = Math.cos(i)/r;
y = Math.sin(i)/r;
z=a*x-b*y;
t=a*y+b*x;
P=stgpro4D(x,y,z,t); //得到此点在三维空间的球极投影
lineTo(P);//描点连线
}
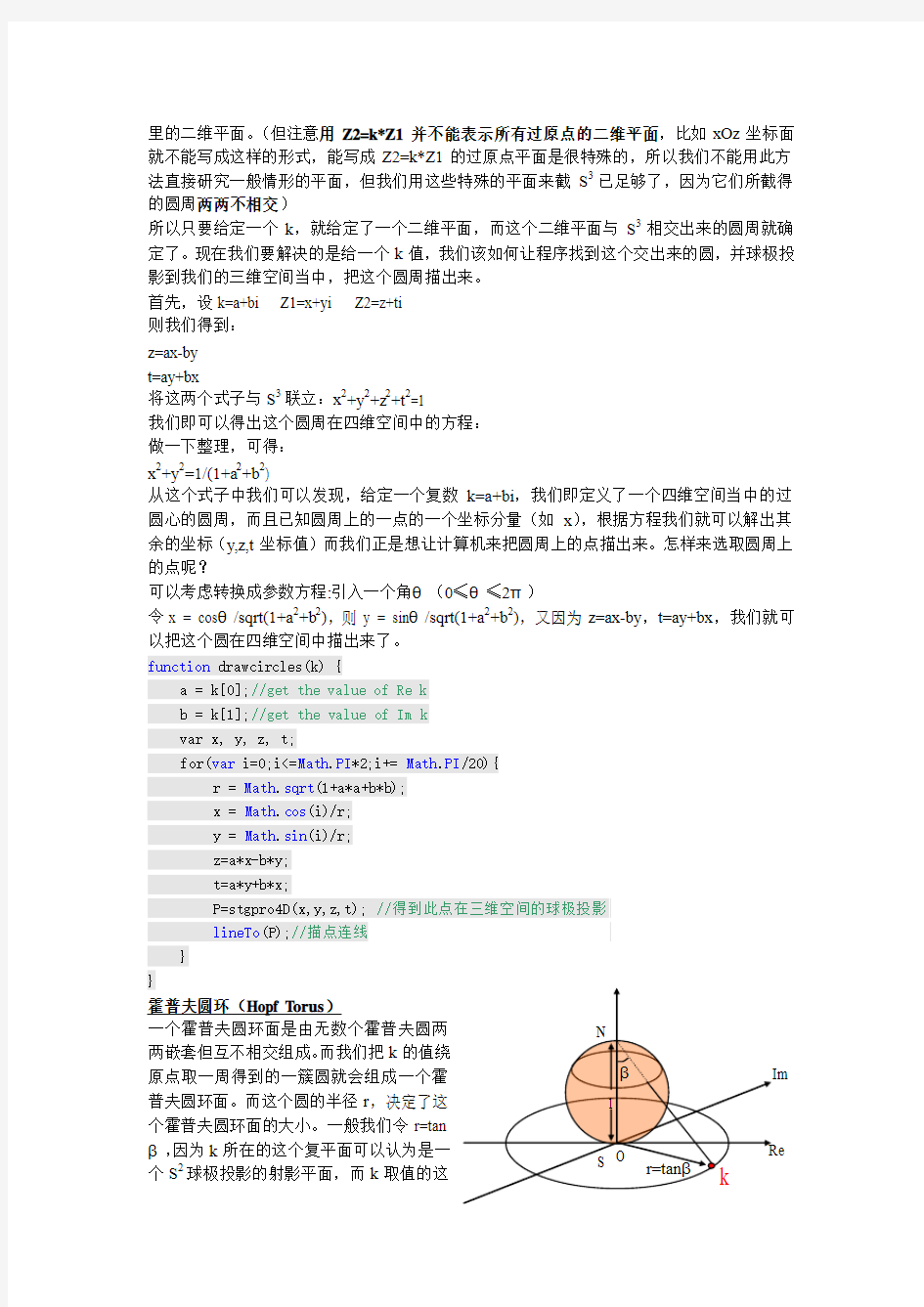
} Array霍普夫圆环(Hopf T orus)
一个霍普夫圆环面是由无数个霍普夫圆两
两嵌套但互不相交组成。而我们把k的值绕
原点取一周得到的一簇圆就会组成一个霍
普夫圆环面。而这个圆的半径r,决定了这
个霍普夫圆环面的大小。一般我们令r=tan
β,因为k所在的这个复平面可以认为是一
个S2球极投影的射影平面,而k取值的这
一簇簇的同心圆则是上的一圈圈纬线。引入的角β则可理解为纬度。(但注意,这样定义的话南极为0°,赤道45°,北极90°),当圆的半径为0时(即南极点,k=0),霍普夫圆环会缩小成一个圆。当圆的半径无限大时(即北极点,k=0),霍普夫圆环会无限膨胀,只留下一根过四维空间S3球面极点的“直线”。最后,我们把整个纤维丛画出来:
function show(k) {
for(var j=0;j<=Math.PI/2;j+= Math.PI/6){ //移动S2上的纬线圈
r = Math.tan(j); //计算k所在圆的半径
for(var k=0;k<=Math.PI*2;k+= Math.PI/20){
//旋转一周,把k点在复平面上取遍描出来
drawcircles([r*Math.cos(k), r*Math.sin(k)]);
//画一个Hopf圆
}
}
}
附:3d max Max script 脚本完整代码(直接粘贴到Maxscript上全部运行):效果:
sphereR=1
gl4_x=0.0
gl4_y=0.0
gl4_z=0.0
--定义坐标旋转角度
fn Ls p1 p2=sqrt((p2[2]-p1[2])*(p2[2]-p1[2])+(p2[1]-p1[1])*(p2[1]-p1[1]))
fn gl4_P p = (--四维坐标旋转函数
_point4d=#()
_point4d = rotates gl4_y #(p[1], p[4]) #(0,0)
p[1] = _point4d[1]
p[4] = _point4d[2]
_point4d = rotates gl4_z #(p[2], p[4]) #(0,0)
p[2] = _point4d[1]
p[4] = _point4d[2]
_point4d = rotates gl4_x #(p[3], p[4]) #(0,0)
p[3] = _point4d[1]
p[4] = _point4d[2]
return proplane p
)
fn proplane Ponit4D =(--四维球极投影函数
x0 = Ponit4D[1]
y0 = Ponit4D[2]
z0 = Ponit4D[3]
t0 = Ponit4D[4]
l = sqrt(x0*x0+y0*y0+z0*z0+t0*t0)
x0 = Ponit4D[1]*sphereR/l
y0 = Ponit4D[2]*sphereR/l
z0 = Ponit4D[3]*sphereR/l
t0 = Ponit4D[4]*sphereR/l
x1 = -((2*x0)/(-2+sphereR*sphereR+sphereR*t0))
y1 = -((2*y0)/(-2+sphereR*sphereR+sphereR*t0))
z1 = -((2*z0)/(-2+sphereR*sphereR+sphereR*t0))
return #(x1,y1,z1)
)
fn rotates sita p1 p2 =(
_an_ = (Patan2 p2 p1)+sita
_r_ = Ls p1 p2
_NX_ = cos(_an_)*_r_+p2[1]
_NY_ = sin(_an_)*_r_+p2[2]
return #(_NX_, _NY_)
)
fn Patan2 p1 p2=atan2 (p1[2]-p2[2]) (p1[1]-p2[1])
fn L3 p1 p2 = ((p2[3]-p1[3])*(p2[3]-p1[3])+(p2[2]-p1[2])*(p2[2]-p1[2])+(p2[1]-p1[1]) *(p2[1]-p1[1]))
for man=0 to 90 by 15 do(
s = splineShape() --create a spline shape
snum=1
for ian=0 to 360 by 20 do(
mm = tan man*cos ian
mn = tan man*sin ian
addNewSpline s --add a spline to it
for jan=0 to 360 by 5 do(
yuanx = cos(jan)/sqrt(1+mm*mm+mn*mn)
yuany = sin(jan)/sqrt(1+mm*mm+mn*mn)
yuanz = yuanx*mm-yuany*mn
yuant = yuany*mm+yuanx*mn
p0=gl4_P #(yuanx, yuany, yuanz, yuant)
addKnot s snum #smooth #curve [p0[1],p0[2],p0[3]]
)
snum=snum+1
)
updateShape s --update the shape
)
参阅:
1.《维度:数学漫步》(Dimensions: A Walk Through Mathematics)官方网站:
https://www.360docs.net/doc/6311579986.html,/Dim_ZH_si.htm
2.顶点数据来自:四维之美https://www.360docs.net/doc/6311579986.html,/atyuwen/archive/2009/11/12/tesseract.html
3. 《维度:数学漫步》详细说明第七、八章:纤维丛
https://www.360docs.net/doc/6311579986.html,/Dim_CH7_ZH_si.htm
最小二乘一次完成算法(程序)
《系统辨识与建模》(MATLAB编程) 信研0701 孙娅萍2007000694 编程第四次作业 仿真模型参数为:a=[-1.5 0.7];b=[1.0 0.5],由下式递推产生502组数据,并形成如下矩阵: z(k)=1.5z(k–1)-0.7z(k–2)+1.0u(k–1)+0.5u(k–2)+v(k) 试用一次完成最小二乘法辨识系统模型。 程序部分: %************************************************************% % ***** 二阶系统的最小二乘一次完成算法辨识程序*****% % 系统辨识的输入信号u是6阶的M序列,长度是500; L = 500; u = load('u.txt'); u2 = load('u2.txt'); u1 = load('u1.txt'); z = zeros(1,L+1); for k = 3 : (L+1) % 理想输出作为系统观测值 z(k) = 1.5 * z(k-1) - 0.7 * z(k-2) + u(k-1) + 0.5 * u(k-2); end % 绘制输入信号和输出观测值的图形 figure(1) i = 1 : 1 : L; subplot(2,1,1) plot(i,u) k = 1 : 1 : (L+1); subplot(2,1,2) plot(k,z) z = z' z1 = load('z1.txt'); z2 = load('z2.txt'); z3 = load('z3.txt'); Na = 2; Nb = 2; % 定义Na、Nb; for i = 1 : (Na+Nb) if ((i == 1)) H = -1 * z2; end if (i == 2) H = -1 * z1; end if (i == (Na+1)) H = u2; end
几种最小二乘法递推算法的小结
一、 递推最小二乘法 递推最小二乘法的一般步骤: 1. 根据输入输出序列列出最小二乘法估计的观测矩阵?: ] )(u ... )1( )( ... )1([)(T b q n k k u n k y k y k ------=? 没有给出输出序列的还要先算出输出序列。 本例中, 2)]-u(k 1),-u(k 2),-1),-y(k -[-y(k )(T =k ?。 2. 给辨识参数θ和协方差阵P 赋初值。一般取0θ=0或者极小的数,取σσ,20I P =特别大,本例中取σ=100。 3. 按照下式计算增益矩阵G : ) ()1()(1)()1()(k k P k k k P k G T ???-+-= 4. 按照下式计算要辨识的参数θ: )]1(?)()()[()1(?)(?--+-=k k k y k G k k T θ?θθ 5. 按照下式计算新的协方差阵P : )1()()()1()(---=k P k k G k P k P T ? 6. 计算辨识参数的相对变化量,看是否满足停机准则。如满足,则不再递推;如不满足, 则从第三步开始进行下一次地推,直至满足要求为止。 停机准则:ε???<--) (?)1(?)(?max k k k i i i i 本例中由于递推次数只有三十次,故不需要停机准则。 7. 分离参数:将a 1….a na b 1….b nb 从辨识参数θ中分离出来。 8. 画出被辨识参数θ的各次递推估计值图形。 为了说明噪声对递推最小二乘法结果的影响,程序5-7-2在计算模拟观测值时不加噪 声, 辨识结果为a1 =1.6417,a2 = 0.7148,b1 = 0.3900,b2 =0.3499,与真实值a1 =1.642, a2 = 0.715, b1 = 0.3900,b2 =0.35相差无几。 程序5-7-2-1在计算模拟观测值时加入了均值为0,方差为0.1的白噪声序列,由于噪 声的影响,此时的结果为变值,但变化范围较小,现任取一组结果作为辨识结果。辨识结果为a1 =1.5371, a2 = 0.6874, b1 = 0.3756,b2 =0.3378。 程序5-7-2-2在计算模拟观测值时加入了有色噪声,有色噪声为 E(k)+1.642E(k-1)+0.715E(k-2),E(k)是均值为0,方差为0.1的白噪声序列,由于有色噪声的影响,此时的辨识结果变动范围远比白噪声时大,任取一组结果作为辨识结果。辨识结果为a1 =1.6676, a2 = 0.7479, b1 = 0.4254,b2 =0.3965。 可以看出,基本的最小二乘法不适用于有色噪声的场合。
四维几何基础知识(二)
导读 本<四维几何基础知识>系列文章一共有五章,分别为: 第一章名词术语和简单的夬 第二章位置关系 第三章投影 第四章面轴 第五章曲体 这是其中的一章.如果您对其他章节感兴趣,请在百度文库中查找,或光临本人的微博: “四维几何基础知识”,里面有打包下载的更新链接. 在本系列文章中,有个非常重要的问题要说明,那就是”多胞体”这个名称用”夬(jué)”字暂代了,例如:五胞体→五体夬,正八胞体→正方夬,超球体→圆夬.其原因已在<前言>中说明,在此不再重复. 感谢您的关注,希望<四维几何基础知识>系列文章能够为您的学业有所帮助. 作者
四维几何基础知识(201802第一次更新) 第二章位置关系 一>低维理论的升级 下面是一些关于四维几何的公设,这些公设若要证明是非常复杂,但基于我们通常的数学认知,可以认为这些公设是正确的. 1>在四维空间中,一条不与立体空间平行的直线,与此空间有且只有一个交 点. 2>在四维空间中,不与立体空间平行的平面,与此空间相交于一条直线. 3>在四维空间中,两个互不平行的立体空间,相交于一个平面. 4>在四维空间中,若立体A平行于立体B, 立体B平行于立体C,则立体A平 行于立体C. 5>在四维空间中,若直线a垂直于立体V, 直线b也垂直于立体V,则直线a 平行于直线b. ………………… 其实我们之前学习的二维和三维的几何理论,大部分在四维空间中都是适用的.在这里先例举一些,希望能够达到举一反三的效果. 二>平行 三维几何中平行的概念只包含直线和平面,在四维几何中平行概念得以进一步扩充,本节讨论直线与立体平行,平面与立体平行,立体与立体平行. 1> 在四维空间中,一条与参照立体空间平行的直线,与此空间是没有交点的.这条直线上的任意一点,到参照立体空间的距离都相等. 设直线a平行于立体空间O-XYZ,在直线a上任取两点,作垂直于参照空间的垂线与空间相交于两点,连接此两点形成直线b,则直线a平行于直线b. 在参照立体空间内,任何平行于直线b的直线都平行于直线b在空间外的平行直线a. 在参照立体空间内,任何平行于直线b的平面都平行于直线b在空间外的平行直线a.图一(1) 2> 在四维空间中,与参照立体空间平行的平面,与此空间没有相交线.平面上的任意一点,到参照立体空间的距离都相等. 设平面S1平行于立体空间O-XYZ,则平面S1内任意直线皆平行于立体空间O-XYZ. 在平面S1上任取三点,作垂直于参照空间的垂线与空间相交于三个交点,过此三
偏最小二乘法
偏最小二乘法 ( PLS)是光谱多元定量校正最常用的一种方法 , 已被广泛应用 于近红外 、 红外 、拉曼 、核磁和质谱等波谱定量模型的建立 , 几乎成为光谱分析中建立线性定量校正模型的通用方法 〔1, 2〕 。近年来 , 随着 PLS 方法在光谱分析尤其是分子光谱如近红外 、 红外和拉曼中应用 的深入开展 , PLS 方法还被用来解决模式识别 、定量校正模型适用性判断以及异常样本检测等定性分析问题 。 由于 PLS 方法同时从光谱阵和浓度阵中提取载荷和得分 , 克服主成分分析 ( PCA)方法没有利用浓度阵的缺点 , 可有效降维 , 并消除光谱间可能存在的复共线关系 , 因此取得令人非常满意的定性分析结果 〔3 ~ 5〕 。 本文主要介绍PLS 方法在光谱定性分析方面的原理及应用 实例 。 偏最小二乘方法(PLS-Partial Least Squares))是近年来发展起来的一种新的多元统计分析法, 现已成功地应用于分析化学, 如紫外光谱、气相色谱和电分析化学等等。该种方法,在化合物结构-活性/性质相关性研究中是一种非常有用的手段。如美国Tripos 公司用于化合物三维构效关系研究的CoMFA (Comparative Molecular Field Analysis)方法, 其中,数据统计处理部分主要是PLS 。在PLS 方法中用的是替潜变量,其数学基础是主成分分析。替潜变量的个数一般少于原自变量的个数,所以PLS 特别适用于自变量的个数多于试样个数的情况。在此种情况下,亦可运用主成分回归方法,但不能够运用一般的多元回归分析,因为一般多元回归分析要求试样的个数必须多于自变量的个数。 §§ 6.3.1 基本原理 6.3 偏最小二乘(PLS ) 为了叙述上的方便,我们首先引进“因子”的概念。一个因子为原来变量的线性组合,所以矩阵的某一主成分即为一因子,而某矩阵的诸主成分是彼此相互正交的,但因子不一定,因为一因子可由某一成分经坐标旋转而得。 在主成分回归中,第一步,在矩阵X 的本征矢量或因子数测试中,所处理的仅为X 矩阵,而对于矩阵Y 中信息并未考虑。事实上,Y 中亦可能包含非有用的信息。所以很自然的一种想法是,在矩阵X 因子的测试中应同时考虑矩阵Y 的作用。偏最小二乘正是基于这种思想的一种回归方法。 偏最小二乘和主成分分析很相似,其差别在于用于描述变量Y 中因子的同时也用于描述变量X 。为了实现这一点,在数学上是以矩阵Y 的列去计算矩阵X 的因子,与此同时,矩阵Y 的因子则由矩阵X 的列去预测。其数学模型为: E P T X +'=F Q U Y +'=
带你进入四维空间
上次说到维度时,有人提到了如何理解四维空间的问题。这是一个非常有趣的话题,可是我一直没有用心写一下。前段时间网上出了一部片子叫做Dimensions: a walk through mathematics,据称里面详细介绍了四维空间。我本以为推荐一下这个片子就能少写一篇又臭又长的日志了的,没想到下下来看了之后发现该片奇差,不了解四维空间的人看了半天估计还是不了解四维空间。最近放假比较闲,打算慢慢来扯一下。如果你以前从来没细想过四维空间的话,相信今天你会有一种超凡脱俗的感觉。 现在,假设我是一个二维世界的人,我不能理解什么是“高度”,什么是“体”,什么是“空间”。你想向我描述三维世界中的立方体。你该怎么说呢?你或许会从立方体的展开图开始谈起:图(a)就是一个立方体的展开图,如果我们剪一个这种形状的纸板,我们可以把它折成一个正方体。我开始好奇了。 - 你说说该怎么做呢? - 先把上面几个正方形折起来,把对应的边粘在一起…… - 等会儿呢等会儿呢,这几个正方形是稳定的形状呀,它们的边怎么可能挨到一起呢? - 傻了吧!在二维世界中它们不是活动的,但是它们可以向第三维度弯折啊!给你画一个图(b)吧,这就是把上面那几个正方形粘合起来的样子,这就成了一个没有封顶、还差一面的正方体…… - 你耍赖!你这样弯折了之后正方形都不是正方形了,都变成梯形了! - 不对,它们仍然是正方形。图(b)的六块区域其实都是正方形,只是由于透视作用,它们看上去好像变“斜”了。 - 嗯,好吧,你继续。 - 现在我们得到的是一个有盖的盒子。上面五个正方形(其中有四个由于处于第三维度而变了形)的“内部”已经形成了“空间”了,可以往里面放东西了。要想做成一个封闭的正方体,只需要把剩下的那个正方形合上去就行了,最终结果就像图(c)那样。 - 咦?图(c)里面,刚才最后要合上去的那个正方形到哪儿去了? - 它就是最大的那个正方形。 - 胡说!那个大正方形是五个小正方形拼成的!这个大正方形刚才在图(b)
四维空间与能量本质
四维空间与能量本质 王大为 国网湖北电力中超建设管理公司湖北武汉微信号:wdw45740967在我们所生活的空间中我们能够直接接触到长宽高这样比较直观的维度,还有虽然我们不能直接接触但是可以感受到的维度--时间。这四个维度共同构成了我们的四维空间。虽然还不能直接接触到四维空间,但幸运的是我们拥有回忆,在回忆里,把我们一连串的活动记录下来,这就形成了我们脑海中的四维空间,虽然它不是真正的四维空间,仅仅由一系列三维片段构成,而且我们的大脑还做不到全方向、各个角度的审视和处理,但是这也足够使我们的智力得到发展并通过学习构建了今天的社会。 对于现实的生活空间人们使用数学这样的工具来描述它,并利用其严密的逻辑来证明我们宇宙空间的自洽性。在这里,只需要一些基本的物理规律,简洁的数学描述就足以促使我们的宇宙运行下去,终日不辍。 在这些基本的物理规律中有一条及其重要的定律,那就是能量守恒定律。数百年间,经历了无数人的质疑、验证,多少永动机梦碎,至今依然屹立不倒。1915年在爱因斯坦发表广义相对论的同年,伟大的德国女数学家埃米〃诺特发现了诺特定理,第一次从理论上证明了能量与时空的对应关系(诺特定理对于物理系统空间平移的不变性给出了动量守恒定律,对于时间平移的不变性给出了能量守恒定律)。而早在十年前的1905年,爱因斯坦就提出了令世人瞩目的质能方程2 E ,向世人揭示了质量与能量 mc 的关系,质量、能量还有空间之间的关系在人类不断的探索与追问下慢慢显露出了一丝真容。人们认识到能量与空间存在着现实对应的关系,对于空间,爱因斯坦的老师闵可夫斯基创立了闵可夫斯基空间,爱尔兰数学家、
物理学家哈密顿发现了四元数,它们都可以用来描述四维空间。然而最敏锐的还是爱因斯坦,他意识到速度与时间的关系以及光速的重要性,即时间随速度的增加而变慢这一日常难以观测到的事实并给出了关系式 t c v t )1('22 -=。在这里如果我们把速度与时间联系起来,可以惊喜的发现它们恰巧具有这样的关系,利用四元数可以表述如下: 2 222221z y x z y x z y x v v v v z y x v v v v i c v j c v k c v c v c v c ++=→→???? ??+++-?=有三个空间轴上的速度,、、分别表示、、表示光速,表示四维速度矢量,注:其中 或者简洁表述如1)1(22 222 =+-c v c v 这样的形式,时间与速度的平方和刚好就是光速的平方,这像极了三角形勾股定理,时间与空间的关系呼之欲出。利用四维空间可以很好的解释这个现象,因为空间是四维的,并以光速扩展,因此所有的物体都是在以光速运动,只有方向不同。在这里时间也是一维空间,物体在其间也具有速度,且物体的时间速度大小是22v c -,与空间速度v 对应(具体了解可以见拙作《关于四元数的几何意义和物理应用》)。 可以说以时间方向作为物体运动的正方向,不同速度的物体只是运动方向偏转了而已,其它并没有什么不同。利用三角函数可以很轻易的描述时间与空间的关系并体现出能量与空间的关联性。例如以时间方向作为运动正方向,构建时间、速度、光速关系的三角形,将光速作为斜边,速度作为对边,时间作为邻边,可以得到一个α角及如下三角函数:
偏最小二乘法算法
偏最小二乘法 1.1 基本原理 偏最小二乘法(PLS )是基于因子分析的多变量校正方法,其数学基础为主成分分析。但它相对于主成分回归(PCR )更进了一步,两者的区别在于PLS 法将浓度矩阵Y 和相应的量测响应矩阵X 同时进行主成分分解: X=TP+E Y=UQ+F 式中T 和U 分别为X 和Y 的得分矩阵,而P 和Q 分别为X 和Y 的载荷矩阵,E 和F 分别为运用偏最小二乘法去拟合矩阵X 和Y 时所引进的误差。 偏最小二乘法和主成分回归很相似,其差别在于用于描述变量Y 中因子的同时也用于描述变量X 。为了实现这一点,数学中是以矩阵Y 的列去计算矩阵X 的因子。同时,矩阵Y 的因子则由矩阵X 的列去预测。分解得到的T 和U 矩阵分别是除去了大部分测量误差的响应和浓度的信息。偏最小二乘法就是利用各列向量相互正交的特征响应矩阵T 和特征浓度矩阵U 进行回归: U=TB 得到回归系数矩阵,又称关联矩阵B : B=(T T T -1)T T U 因此,偏最小二乘法的校正步骤包括对矩阵Y 和矩阵X 的主成分分解以及对关联矩阵B 的计算。 1.2主成分分析 主成分分析的中心目的是将数据降维,以排除众多化学信息共存中相互重叠的信息。他是将原变量进行转换,即把原变量的线性组合成几个新变量。同时这些新变量要尽可能多的表征原变量的数据结构特征而不丢失信息。新变量是一组正交的,即互不相关的变量。这种新变量又称为主成分。 如何寻找主成分,在数学上讲,求数据矩阵的主成分就是求解该矩阵的特征值和特征矢量问题。下面以多组分混合物的量测光谱来加以说明。假设有n 个样本包含p 个组分,在m 个波长下测定其光谱数据,根据比尔定律和加和定理有: A n×m =C n×p B p×m 如果混合物只有一种组分,则该光谱矢量与纯光谱矢量应该是方向一致,而大小不同。换句话说,光谱A 表示在由p 个波长构成的p 维变量空间的一组点(n 个),而这一组点一定在一条通过坐标原点的直线上。这条直线其实就是纯光谱b 。因此由m 个波长描述的原始数据可以用一条直线,即一个新坐标或新变量来表示。如果一个混合物由2个组分组成,各组分的纯光谱用b1,b2表示,则有: 1122 T T T i i i a c b c b =+ 有上式看出,不管混合物如何变化,其光谱总可以用两个新坐标轴b1,b2来表示。因此可以 推出,如果混合物由p 个组分组成,那么混合物的光谱就可由p 个主成分轴的线性组合表示。
偏最小二乘法(PLS)简介
偏最小二乘法(PLS)简介 偏最小二乘法(PLS )简介 偏最小二乘法(PLS )简介 简介 偏最小二乘法是一种新型的多元统计数据分析方法,它于1983年由伍德(S.Wold)和阿巴诺(C.Albano)等人首次提出。近几十年来,它在理论、方法和应用方面都得到了迅速的发展。 偏最小二乘法 长期以来,模型式的方法和认识性的方法之间的界限分得十分清楚。而偏最小二乘法则把它们有机的结合起来了,在一个算法下,可以同时实现回归建模(多元线性回归)、数据结构简化(主成分分析)以及两组变量之间的相关性分析(典型相关分析)。这是多元统计数据分析中 的一个飞跃。 偏最小二乘法在统计应用中的重要性体现在以下几个方面: 偏最小二乘法是一种多因变量对多自变量的回归建模方法。偏最小二乘法可以较好的解决许多以往用 普通多元回归无法解决的问题。 偏最小二乘法之所以被称为第二代回归方法,还由于它可以实现多种数据分析方法的综合应用。 主成分回归的主要目的是要提取隐藏在矩阵X 中的相关信息,然后用于预测变量Y 的值。 这种做法可以保证让我们只使用那些独立变量,噪音将被消除,从而达到改善预测模型质量的目的。但是,主成分回归仍然有一定的缺陷,当一些有用变量的相关性很小时,我们在选取主成分时就很容易把它们漏掉,使得最终的预测模型可靠性下降,如果我们对每一个成分 进行挑选,那样又太困难了。 偏最小二乘回归可以解决这个问题。它采用对变量X 和Y 都进行分解的方法,从变量X 和Y 中同时提取成分(通常称为因子),再将因子按照它们之间的相关性从大到小排列。现在,我们要建立一个模型,我们只要决定选择几个因子参与建模就可以了 基本概念 偏最小二乘回归是对多元线性回归模型的一种扩展,在其最简单的形式中,只用一个线性模 型来描述独立变量Y 与预测变量组X 之间的关系: 偏最小二乘法(PLS) 简介
(完整word版)多种最小二乘算法分析+算法特点总结
第一部分:程序设计思路、辨识结果分析和算法特点总结 (2) 一:RLS遗忘因子法 (2) RLS遗忘因子法仿真思路和辨识结果 (2) 遗忘因子法的特点: (3) 二:RFF遗忘因子递推算法 (4) 仿真思路和辨识结果 (4) 遗忘因子递推算法的特点: (5) 三:RFM限定记忆法 (5) 仿真思路和辨识结果 (5) RFM限定记忆法的特点: (7) 四:RCLS偏差补偿最小二乘法 (7) 仿真思路和辨识结果 (7) RCLS偏差补偿最小二乘递推算法的特点: (9) 五:增广最小二乘法 (9) 仿真思路和辨识结果 (9) RELS增广最小二乘递推算法的特点: (11) 六:RGLS广义最小二乘法 (12) 仿真思路和辨识结果 (12) RGLS广义最小二乘法的特点: (14) 七:RIV辅助变量法 (14) 仿真思路和辨识结果 (14) RIV辅助变量法的特点: (16) 八:Cor-ls相关最小二乘法(二步法) (17) 仿真思路和辨识结果 (17) Cor-ls相关最小二乘法(二步法)特点: (18) 九:MLS多级最小二乘法 (19) 仿真思路和辨识结果 (19) MLS多级最小二乘法的特点: (22) 十:yule_walker辨识算法 (23) 仿真思路和辨识结果 (23) yule_walker辨识算法的特点: (24) 第二部分:matlab程序 (24) 一:RLS遗忘因子算法程序 (24) 二:RFF遗忘因子递推算法 (26) 三:RFM限定记忆法 (28) 四:RCLS偏差补偿最小二乘递推算法 (31) 五:RELS增广最小二乘的递推算法 (33) 六;RGLS 广义最小二乘的递推算法 (36) 七:Tally辅助变量最小二乘的递推算法 (39) 八:Cor-ls相关最小二乘法(二步法) (42) 九:MLS多级最小二乘法 (45) 十yule_walker辨识算法 (49)
四维空间的生物就是鬼世界上最神秘的生物
四维空间的生物就是鬼世界上最神秘的生物 未解之谜多的是,世界万物皆存在神秘的一面,那些不寻常的生物,让我们一起了解并揭开其神秘的面纱吧。 世界上最神秘的生物 一、吃腐人肉的康加玛托 据传说,神秘生物康加玛托可能在任何时刻从天而降,攻击船只。这种神秘生物据说会盗掘人类的墓葬,吃掉腐烂的人肉。1923年,探险家弗兰克-梅兰德出版了《非洲的巫术》,一下子提高了康加玛托的名气。根据描述,康加玛托身躯巨大,呈红色,长有带羽毛的翅膀和长满牙齿的喙。 二、印度尼西亚爪哇蝙蝠猴 在印尼爪哇的雨林深处,你可能在夜里听到怪异的哭叫声。这种令人恐怖的声音据说由正在觅食的蝙蝠猴发出。根据传说,蝙蝠猴蜷缩在雨林地面上时的体型与一名儿童相当,长有锋利的爪子和翅膀,翼展可达到10英尺(约合3米),是狐蝠的两倍。狐蝠是世界上已知最大的蝙蝠。 三、南非闪电鸟 南非闪电鸟据说能够以一种非常不寻常的方式展开空袭。正如名字所暗示的那样,这种鸟会制造闪电和雷声。非洲的一些原始部落相信这种说法。据信,雷鸟会喝人血。它们经常被描述成
黑白相间,体型与人相当的神秘动物。南非的闪电鸟据说能够以一种非常不寻常的方式展开空袭。 四、巨型类鸟:雷鸟与大鹏 在会飞的巨型类鸟神秘生物中,最著名的当属大鹏和雷鸟。据传,亚利桑那州的两名牛仔射杀了一只身长28米的巨鸟,翼展达到约58米。1977年,伊利诺斯州的一位母亲声称他10岁的儿子被一只巨鸟掠走,而后从约6米的高度抛下。类似的巨鸟绑架或者绑架未遂的传闻也时有出现。 五、东非珀珀巴瓦 这种神秘生物据说大约40年前曾在桑给巴尔群岛的奔巴岛出现,会攻击和强奸猎物。受害者随后向其他人讲述自己的可怕经历,导致珀珀巴瓦再也没有在奔巴岛出现。据说,珀珀巴瓦没有固定的形态,能够变成动物或者人的形态。一些人表示它们是恶魔的灵魂。
基于最小二乘算法的RBF
基于正交最小二乘算法的RBF神经网络 一、实验环境 硬件平台Win10 64位操作系统,1.5GHZ,4G内存,软件版本MA TLAB2015b 二、实验数据 训练数据集: T F W M Y Q 1000.00130010000 20.00740.03350.00150.00320.010610000 30.00430.022300.00470.005310000 40.5520.30170.25810.30940.231601000 50.54520.27930.26110.29880.203601000 60.55020.24580.27170.31150.234701000 70.24620.15080.09470.09640.099900100 80.25350.10610.09680.09710.08100100 90.26650.08940.09370.09940.090800100 100.66150.52510.51950.471100010 110.67380.44130.52250.47320.966700010 120.66650.47490.52550.47690.975800010 13110.981210.820600001 140.97970.977710.9960.775900001 150.98460.97270.98470.98570.7600001 测试数据集: T F W M Y Q 10.00310.02350.00050.0030.004510000 20.54930.26260.26590.30880.222101000 30.25720.10060.09580.09810.08900100 40.67040.49720.52350.47410.979100010 50.9920.98990.99790.99370.797900001 三、算法介绍 RBF函数网络从结构上看是一个3层前馈网络,包括一个输入层、一个输出层和一个隐含层。输入层节点的作用是将输入数据传递到隐含层节点。隐含层节点称为RBF节点,其激活函数为辐射状函数的神经元构成,通常采用高斯型函数:Array 图1 RBF结构 RBF网络中所用的非线性函数的形式对网络性能的影响并不是至关重要的,关键因素是基函数中心的选取,中心选取不当构造出来的RBF网络的性能一般不能令人满意。例如,如果某些中心靠的太近,会产生近似线形相关,从而带来数值上的病变条件。基本的RBF 神经网络采用随机抽取固定中心的方法,在输入样本数据的分布具有某种特性的情况下,采用这种方法解决给定问题就显得简单可行了。而针对其缺陷,已经有许多改进的方法,其中 之一就是利用最小二乘法选取中心,训练网络权重。
四维空间
四维空间论 在我们这个世界中找不到和海市蜃楼一样的建筑,这说不定是时空扭曲导致的未来世界建筑的投影,也可能海市蜃楼发生的地方与四维空间有关 有科学家坚信人类一直生活在三维空间中,在三维空间中并不存在十分高级的智慧生命体,它只能属于中等的地位,不同维度之间都有着无形的界限,而低维生物一直生活在二维空间,就拿蚂蚁来说,它很难进入三维空间,在它的眼中人类就像是庞然大物,之所以能判定人类处于三维空间,主要是人们可以观察到立体状态的物体,并通过大脑进行信息处理,在三维空间中就可以很直接明了的看到平面,如果在二维空间的话只能看到线,如果是一维空间那就将成无数个点。很多人都认为宇宙中存在着四维空间,四维空间很明显比三维空间更为高级,在19世纪的时候,有一位科学家对四维空间进行了深入的研究,它就是黎曼。黎曼拥有自己的见解,他将非欧几何和欧氏几何相互结合在一起,所以便得出四维空间真实存在的观点。到目前为止,有很多科学家一直反对这个观点,但他们都没有足够的把握去推翻。有科学家认为,如果生存在三维空间的人类,突然进入到四维空间,那么内部的各个机制都会发生前所未有的变化,很有可能由于无法适从最终崩溃,后果难以想象,主要是四维空间的所有都是同步的,如果超越承受能力,那么人体的机制很快陷入一片混乱,人类离死亡也就不远了。目前世界上已经确认存在四个维度空间,分别是零维、一维、二维和三维,所谓三维空间就是由无数个面组成的立体形状的空间。 零维:让我们从一个点开始,和我们几何意义上的点一样,它没有大小、没有维度。它只是被想象出来的、作为标志一个位置的点。它什么也没有,空间、时间通通不存在,这就是零维度。 为了向更高的维度前进,现在我们现在来想象一下二维世界里的生物。因为二维空间没有深度(也可以理解成厚度),只有长度与宽度,我们就可以将它理解成“纸片人”,或者是扑克牌K.J.A Q里的画像。因为维度的局限,这个可怜的二维生物也只能看到二维的形状。如果让它去看一个三维的球体,那么他只能看到的是这个球体的截面,也就是一个圆。现在
四维空间不同于三维空间四维空间指的是标准欧几里得空间可以
四维空间不同于三维空间四维空间指的是标准欧几里得空 间可以 人们提出了关于四维空间的一些猜想。尽管这些猜想现在并不能证明是正确的。但科学理论有很多是由猜想开始的。现今科学理论一般是基于现象总结规律。而关于四维空间的现象没有足够准确清晰的认识。或者看到了这种现象却并没有想到是四维空间引起的。 中文名,四维空间。别称,四度空间。表达式,ax+by+cz+du+e=0。应用学科,数学。物理学。适用领域范围,量子。宇宙学。 定义。在物理学中描述物质变化时所需的参数。 这个参数就叫做维。几个参数就是几个维。比如描述“门”的位置就只需要角度。所以是一维的而不是二维。简单地说:零维是点。没有长度。宽度及高度。一维是由无数的点组成的一条线。只有长度。没有其中的宽度。高度。二维是由无数的线组成的面。有长度。宽度没有高度。三维是由无数的面组成的体。有长度。宽度。高度。因为人的眼睛只能看到二维。二维生物看对方只有一条线。人的双眼看到的是两个二维投影。 经过大脑处理形成一个整体的视觉。一个简单的说法:N维就是两个以上的N-1维物体垂直所形成的空间。因为。人类只能理解3维。所以后面的维度可以通过数学理论构建。但要仔细理解就很难。在量子力学。仍在建立的弦理论。认为世界是11维的。首先。错误的说法是把”四维空间定义为三维空间+时间轴”。而”三维空间+时间维”
是另一种说法。前者也并非是什么四维时空。而且本身四维时空是个伪概念。很简单“时间只是因为粒子运动。 而为什么这一维会定义为时间维度呢。是因为某一派观点认为广延的“时间”具有空间性。故而出现的一种替代说法。你要将它叫什么其实都可以。它是一个统一。确定的定义概念下产生的依据不同学派自主概念的命名法。有些同学有点纠结于“时空”这个说法。我先说。没有四维时空这种说法还有另一个理由。也就是时空在近代物理学中的概念本来就是四维的。所以不会冒出五维时空。也不存在时空前面特别说明为四维。近代物理学某一派认为。 时间空间相互且可变。且其变量互相存于其中。而他们在特定条件下所对应的这一个广域叫做时空。时空可能受到物质和能量 * 发生扭曲或者凹陷。且其最小单位是普朗克时间和普朗克长度。这是这个概念的由来。但是很多人把时空和四维空间混用。这两者有相关性。但不能混用。从广义上讲:维度是事物“有联系”的抽象概念的数量。“有联系”的抽象概念指的是由两个抽象概念联系而成的抽象概念。如面积。所以四维就是四个有联系的抽象概念组成的。 第四个抽象概念是实时间。第四联系值为速度。高维度时空和高维度空间是不同的。举例来说。在三维空间中只有一个时间维度。但它是一个伪维度。即它的单位和其他三个维度不同。四维空间的第四维仍然和三维空间的维度具有相同性质。时间仍是伪维度。因此。不可把时空和空间混为一谈。 概念。
系统辨识—最小二乘法汇总
最小二乘法参数辨识 201403027 摘要:系统辨识在工程中的应用非常广泛,系统辨识的方法有很多种,最小 二乘法是一种应用极其广泛的系统辨识方法.阐述了动态系统模型的建立及其最小二乘法在系统辨识中的应用,并通过实例分析说明了最小二乘法应用于系统辨识中的重要意义. 关键词:最小二乘法;系统辨识;动态系统 Abstract: System identification in engineering is widely used, system identification methods there are many ways, least squares method is a very wide range of application of system identification method and the least squares method elaborated establish a dynamic system models in System Identification applications and examples analyzed by the least squares method is applied to illustrate the importance of system identification. Keywords: Least Squares; system identification; dynamic system
引言 随着科学技术的不断发展,人们认识自然、利用自然的能力越来越强,对于未知对象的探索也越来越深入.我们所研究的对象,可以依据对其了解的程度分为三种类型:白箱、灰箱和黑箱.如果我们对于研究对象的内部结构、内部机制了解很深入的话,这样的研究对象通常称之为“白箱”;而有的研究对象,我们对于其内部结构、机制只了解一部分,对于其内部运行规律并不十分清楚,这样的研究对象通常称之为“灰箱”;如果我们对于研究对象的内部结构、内部机制及运行规律均一无所知的话,则把这样的研究对象称之为“黑箱”.研究灰箱和黑箱时,将研究的对象看作是一个系统,通过建立该系统的模型,对模型参数进行辨识来确定该系统的运行规律.对于动态系统辨识的方法有很多,但其中应用最广泛,辨识 效果良好的就是最小二乘辨识方法,研究最小二乘法在系统辨识中的应用具有现实的、广泛的意义. 1.1 系统辨识简介 系统辨识是根据系统的输入输出时间函数来确定描述系统行为的数学模型。现代控制理论中的一个分支。通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。而系统辨识所研究的问题恰好是这些问题的逆问题。通常,预先给定一个模型类μ={M}(即给定一类已知结构的模型),一类输入信号u和等价准则J=L(y,yM)(一般情况下,J是误差函数,是过程输出y和模型输出yM的一个泛函);然后选择使误差函数J达到最小的模型,作为辨识所要求的结果。系统辨识包括两个方面:结构辨识和参数估计。在实际的辨识过程中,随着使用的方法不同,结构辨识和参数估计这两个方面并不是截然分开的,而是可以交织在一起进行的。 1.2系统辨识的目的 在提出和解决一个辨识问题时,明确最终使用模型的目的是至关重要的。它对模型类(模型结构)、输入信号和等价准则的选择都有很大的影响。通过辨识建立数学模型通常有四个目的。 ①估计具有特定物理意义的参数有些表征系统行为的重要参数是难以直接测量的,例如在生理、生态、环境、经济等系统中就常有这种情况。这就需要通过能观测到的输入输出数据,用辨识的方法去估计那些参数。 ②仿真仿真的核心是要建立一个能模仿真实系统行为的模型。用于系统分析的仿真模型要求能真实反映系统的特性。用于系统设计的仿真,则强调设计参数能正确地符合它本身的物理意义。 ③预测这是辨识的一个重要应用方面,其目的是用迄今为止系统的可测量的输入和输出去预测系统输出的未来的演变。例如最常见的气象预报,洪水预报,其他如太阳黑子预报,市场价格的预测,河流污染物含量的预测等。预测模型辨识的等价准则主要是使预测误差平方和最小。只要预测误差小就是好的预测
四维空间球极投影与霍普夫纤维丛具体算法实现
四维空间球极投影与霍普夫纤维丛具体算法实现 作者Wxy 本文是一篇根据一部数学科普CG电影《维度:数学漫步》[1]对四维空间与霍普夫纤维丛的讲解基础上,讲解如何在支持3D软件编程下绘制出霍普夫纤维丛的算法,实现绘制《维度:数学漫步》影片上所展示的图形。 球极投影(Stereographic Projection) 首先,我们来看一下三维空间中球极投影的公式:设一个球心在原点的半径=R的球。设投影极点为(0,0,1),投影平面:z=-1 我们不难得出:给一球面上的点(x0,y0,z0),它在投影平面:z=-1上投影坐标为: x = -((2*x0)/(-2+R*R+R*z0)); y = -((2*y0)/(-2+R*R+R*z0)); 这是一段伪代码: function stgpro(x0,y0,z0) { x = -((2*x0)/(-2+R*R+R*z0)); y = -((2*y0)/(-2+R*R+R*z0)); return [x, y, -1]; } 如果要画一个正多面体的球极投影,得先把它“膨胀”到球心在原点的球面上: function proSphere(x0,y0,z0) { l = Math.sqrt(x0*x0+y0*y0+z0*z0); return [R*x0/l, R*y0/l, R*z0/l]; } 而通过类比的思想,我们可以得出四维空间球极投影公式: x = -((2*x0)/(-2+R*R+R*t0)); y = -((2*y0)/(-2+R*R+R*t0)); z = -((2*z0)/(-2+R*R+R*t0)); function stgpro4D(x0,y0,z0,t0) { x = -((2*x0)/(-2+R*R+R*t0)); y = -((2*y0)/(-2+R*R+R*t0)); z = -((2*z0)/(-2+R*R+R*t0)); return [x, y, z, -1]; } 有了球极投影公式,再加上坐标旋转变换, 及多胞体顶点坐标数据[2],我们就可以把 多胞体在四维空间中滚动做出来了。此图是我用3d max的Maxscript实现的正120胞体球极投影模型。 霍普夫纤维丛中的圆(Hopf Circle) 定义一个欧式复二维空间:C2,这个空间中的任意一点都能用两个有序复数对(Z1,Z2)表示,即用四个有序实数对表示的空间——实四维空间。 在《维度:数学漫步》第七八章的详细说明[3]中说,我们用Z2=k*Z1来表示一个四维空间
一维二维三维四维空间 生活点滴
一维二维三维四维空间 ? 生活点滴 一维二维三维四维空间 2007-07-06 23:53:38 发表于生活工作本文链接: 一维二维三维四维空间 最近下班座在公司的车上一直在思考这个空间的问题,不知道是什么原因触发我一直想这个事情,说说我的想法吧!就以封闭为例,在一维空间的世界里面,比如一条直线,___|____mm____|,那么这个mm永远就没有办法取出来了,mm被彻底的封闭了,如果在二维的世界里呢?这个mm就可以从不同的方向取出来了,所以二维对于一维来说,就灵活和复杂很多了。反过来说,在二维的空间里面有无穷多的一维世界存在,对于一维的世界来说,二维的每一个元素都可以是神,因为他可以随便改变一维的世界,但是这个神也不是万能的,因为他对某一个一的改变只是一个随机事件,对于某一个一维世界,简直就是小小小小概率时间。三维对于二维呢?二维的一个圆形中的任何一个元素,在二维的世界都是被绝对封闭的,可是到了三维呢?我们就可以随便取出来,但是你是否注意到,二维对于三维来说,仅仅是我们构的一个概念而已,谁能想像二维的世界呢,你能看到二维的元素么,不能,因为我们生活在三维的空间,但是我们的一举一动,说不定就干涉来身边的二维世界,而这个我们确没有任何的感知,被我们改变的二维世界就是一个小小小概率事件!三维之后呢?四维,你能想像么?假如你把东西放在一个封闭的铁球里面,三维世界里面,能不破坏铁球就能取出里面的东西么?不能!在三维世界里面,我们可以很好的控制三个坐标,你可以吧东西拉长、变短、加高。同样的道理,我们不妨假设四维世界相比三维来说多出来的是一个时间坐标轴,那么在四维世界里面,就可以方便的把铁球里面的东西取出来了,而不损坏铁球。因为我们可以像控制东西的长短那样控制时间,将铁球外壳的时间延长至球壳损坏,同时控制内部的时间不要改变,取出东西之后,将时间恢复到原始状态,铁球也就恢复了原装,这不就方便的取出东西了么?所以如果四维世界真存在,或者真有类似生命的东西存在的话,那么对于我们来说他们就是神仙了,但是他们不能随便控制我们就如我们不能随便控制二维时间的东西一样,因为我们找不到二维的元素。所以某些人失踪了,比如著名的百慕大地区的时间,估计就可能是跳出了三维的空间,所以没有办法回来,就比如一个平面,二维的东西平面的交界出一不小心步入歧途,可能就进入了另外一个二维世界,对于三维,也许会有类似的情况!这些东西越想越复杂,所以到此为止,自己胡乱思考的东西,现在把它给记下来
偏最小二乘法基本知识
偏最小二乘法(PLS)简介-数理统计 偏最小二乘法partial least square method是一种新型的多元统计数据分析方法,它于1983年由伍德(S.Wold)和阿巴诺(C.Albano)等人首次提出。近几十年来,它在理论、方法和应用方面都得到了迅速的发展。 偏最小二乘法 长期以来,模型式的方法和认识性的方法之间的界限分得十分清楚。而偏最小二乘法则把它们有机的结合起来了,在一个算法下,可以同时实现回归建模(多元线性回归)、数据结构简化(主成分分析)以及两组变量之间的相关性分析(典型相关分析)。这是多元统计数据分析中的一个飞跃。 偏最小二乘法在统计应用中的重要性体现在以下几个方面: 偏最小二乘法是一种多因变量对多自变量的回归建模方法。偏最小二乘法可以较好的解决许多以往用普通多元回归无法解决的问题。 偏最小二乘法之所以被称为第二代回归方法,还由于它可以实现多种数据分析方法的综合应用。 主成分回归的主要目的是要提取隐藏在矩阵X中的相关信息,然后用于预测变量Y的值。这种做法可以保证让我们只使用那些独立变量,噪音将被消除,从而达到改善预测模型质量的目的。但是,主成分回归仍然有一定的缺陷,当一些有用变量的相关性很小时,我们在选取主成分时就很容易把它们漏掉,使得最终的预测模型可靠性下降,如果我们对每一个成分进行挑选,那样又太困难了。 偏最小二乘回归可以解决这个问题。它采用对变量X和Y都进行分解的方法,从变量X和Y 中同时提取成分(通常称为因子),再将因子按照它们之间的相关性从大到小排列。现在,我们要建立一个模型,我们只要决定选择几个因子参与建模就可以了
基本概念 偏最小二乘回归是对多元线性回归模型的一种扩展,在其最简单的形式中,只用一个线性模型来描述独立变量Y与预测变量组X之间的关系: Y= b0 + b1X1 + b2X2 + ... + bpXp 在方程中,b0是截距,bi的值是数据点1到p的回归系数。 例如,我们可以认为人的体重是他的身高、性别的函数,并且从各自的样本点中估计出回归系数,之后,我们从测得的身高及性别中可以预测出某人的大致体重。对许多的数据分析方法来说,最大的问题莫过于准确的描述观测数据并且对新的观测数据作出合理的预测。 多元线性回归模型为了处理更复杂的数据分析问题,扩展了一些其他算法,象判别式分析,主成分回归,相关性分析等等,都是以多元线性回归模型为基础的多元统计方法。这些多元统计方法有两点重要特点,即对数据的约束性: 1.变量X和变量Y的因子都必须分别从X'X和Y'Y矩阵中提取,这些因子就无法同时表示变量X和Y的相关性。 2.预测方程的数量永远不能多于变量Y跟变量X的数量。 偏最小二乘回归从多元线性回归扩展而来时却不需要这些对数据的约束。在偏最小二乘回归中,预测方程将由从矩阵Y'XX'Y中提取出来的因子来描述;为了更具有代表性,提取出来的预测方程的数量可能大于变量X与Y的最大数。 简而言之,偏最小二乘回归可能是所有多元校正方法里对变量约束最少的方法,这种灵活性让它适用于传统的多元校正方法所不适用的许多场合,例如一些观测数据少于预测变量数时。并且,偏最小二乘回归可以作为一种探索性的分析工具,在使用传统的线性回归模型之前,先对所需的合适的变量数进行预测并去除噪音干扰。