状态表示&状态转移(进阶篇)

动态规划总结
专题一状态表示
在用动态规划解题时,我么往往第一个考虑的是数组维数,其实数组维度(和状态表示)是有规律可循的:
A.二维空间的DP:
一般采用二位数组——d[i,j]表示当i,j为某一边角时的极值(e:d[i,j]可以表示以i,j为右上角时所能构成的正方形的边长最大值——听不懂?接着往下看)。
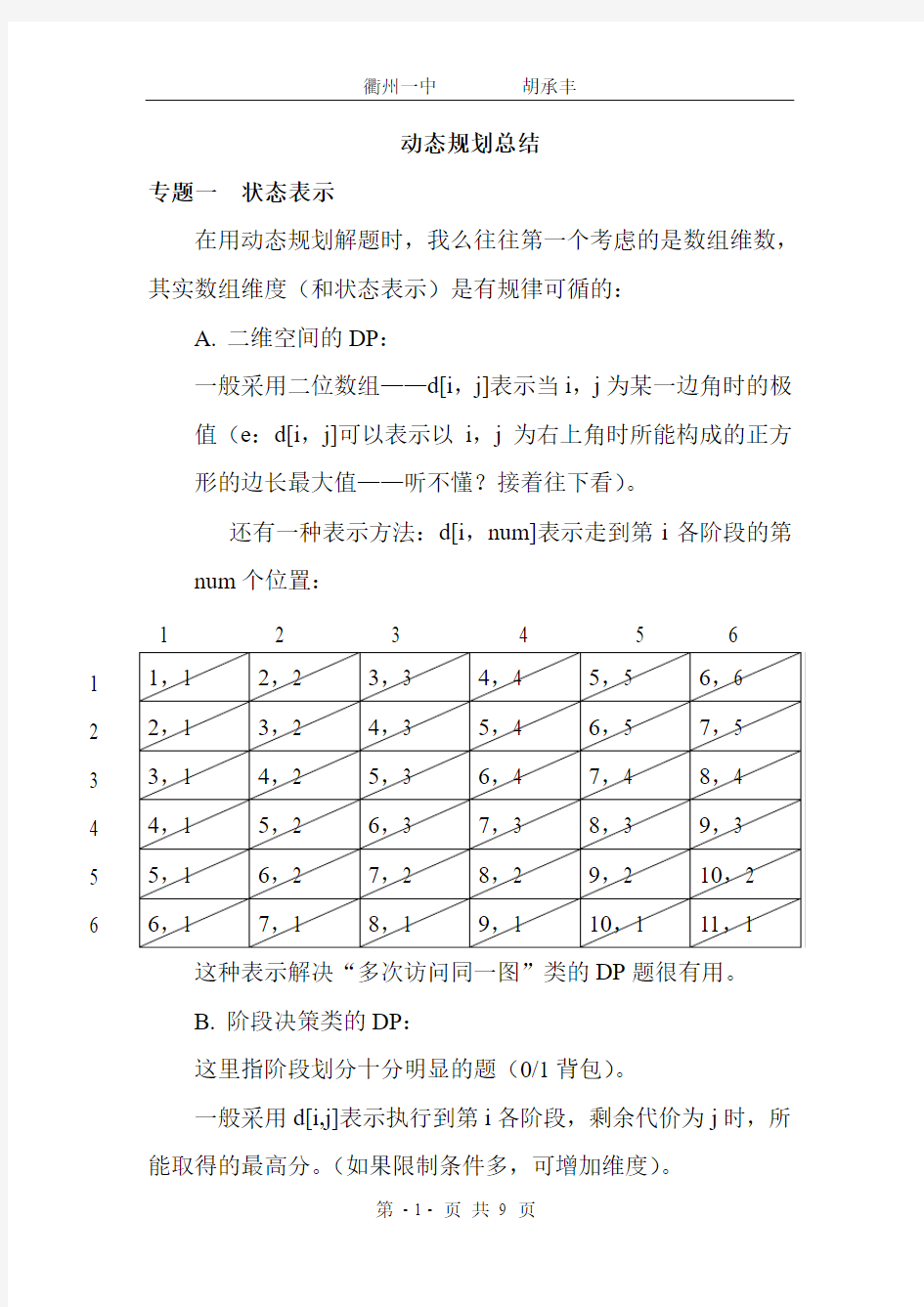
还有一种表示方法:d[i,num]表示走到第i各阶段的第num个位置:
这种表示解决“多次访问同一图”类的DP题很有用。
B.阶段决策类的DP:
这里指阶段划分十分明显的题(0/1背包)。
一般采用d[i,j]表示执行到第i各阶段,剩余代价为j时,所能取得的最高分。(如果限制条件多,可增加维度)。
C.树形关系类的DP:
一般用d[i]来表示以i为根节点的最优值,可以加维来保证正确性。
D.线性关系类的DP:
这一类的DP最简单,是每一个OIER的必备基础,在这里就不废话了。
专题二状态转移
(专题二与专题一的分类标准不同,因为dugushuiyi说这样分更好,感谢他)
A.线性转移
一般公式:d[i]=operation(d[j]+w[j,i])(w[i]为由j转移到i的消耗){operation为求最值}
B.阶段性转移
一般公式:
d[i,j]:= operation(d[i-1,k]+w[k,j],d[i-2,……)
如果只涉及到前面的有限个阶段,可以使用滚动数组。
D[I mod n,j]= operation(d[(i-1)mod n,k]+w[k,j],d[(i-2)mod n,……)
C.树性转移
一般公式:
D[i,j]=max(d[lson[i],k1]+w[j,k1],d[rson[i],k2]+w[j,k2])遍历顺序一般为后序遍历顺序。
D.多维空间转移
一般公式:
d[i,j]:=max(d[i-1,j]+w1,d[i,j-1]+w2)
复杂度分析:
DP的复杂度为:
状态表示的数组维数*状态转移的代价
So A 的复杂度为O(n^2)
BCD:O(n^3);
专题三题目分类总结
一、一般类试题
题库:
最长不下降子序列
最长匹配前缀
邮票组合
共性总结:
1、题目一般可以通过for 语句来枚举状态,所以时间复
杂度为O(N^2)
本类的状态是基础的基础,大部分的动态规划都要用到它,成为一个维。
一般来说,有两种编号的状态:
状态(i)表示前i个元素决策组成的一个状态。
状态(i)表示用到了第i个元素,和其他在1到i-1间的元素,
决策组成有的一个状态。
二、01背包:(重点)★★★
题库:
01背包(USACO、vijos1025、1104)
装箱问题(NOIP01 Trade 4)、
取火柴问题(sgu153 Playing with matches)
共性总结:
1、一般都从阶段的角度来表示状态
2、因为d[i,j]只与d[i-1,k]有关,所以可以用滚动数组
来实现。D[odd(i),j]
各例分析:
1、采药(NOIP2006、vijos)
一个背包,每个物品只能放一次。
(1)D[i,j]:=max(d[i,j],d[i,j-t[i]]+p[i]);
D[I,j]表示决策了前i个物品,花费了j的代价
优化:滚动数组.
(2)D[odd(i),j]:=max(d[i-1,j],d[odd(i-1),j-t[i]]+p[i]);
观察(2)不难发现,当我们算到j时,1→j-1并没有更新,而d[i-1,j-t[i]]一定在1→j-1的范围内,所以完全可以用一位数组,方程为:d[i]:=max(d[i],d[i-t[j]]+p[j])
在最外层循环一下j就ok了。(精益求精)
2、总分(USACO)
一个背包,可以重复放物品。
D[i]:=max(d[i],d[i-t[j]]+p[j])
D[i]表示花费i各单位时间所能达到的最大值。(较简单)
3、Raucous Rockers(USACO)
多个背包,不可以重复放物品,但放物品的顺序有限制。
d[I,j,k]:=max(d[I-1,j,k],d[I-1,j,k-t[i]]+p[i],d[i-1,j-1,maxtime-t[i]])
d[I,j,k]表示决策到第i个物品、第j个背包,此背包花费了k的空间。d[I-1,j,k]表示不取i,d[I-1,j,k-t[i]]表示取了i病房入背包j中,d[i-1,j-1,maxtime-t[i]] 表示取了i病房入背包j-1中。比较好理解。(本题也可以用滚动数组优化)
4、Fence Rails(USACO)
多个背包,不可以重复放物品,但放物品的顺序无限制。
这道题只能用search做了,因为放物品的顺序无限制,无论怎么表示状态,都不能保证无后效性。(为什么 1 、2题可以?想一想。——因为只有一个背包)
背包为题的版本还有很多,但万变不离其宗,我们应该抛开背景,来观察问题的实质。
我也做过和1、2、3类似的背包问题,有些版本和1、2、3极像,但不能使用DP,因为它将一些本质的条件更改了。
三、旅游DP:
题库:
方格取数(NOIP00 advance 4)
旅行商简化版(VIJOS)(欧几里德回路)
巡游加拿大(IOI95、USACO)
三取方格数(VIJOS)
Hill(VIJOS)
花店橱窗布置(IOI99)
共性分析:
1、行走方向决定阶段性
有规定源点与终点。每次行走方向都有一定的规定,使原点到终点的所有路径形成无环有向图。
2、决策稀疏性
就是所谓走法,若对于一个状态,它的前驱或者后继数很少(从无环有向图角度,就是入度或出度少),称决策稀疏。
3、状态稀疏性
就是很多状态是没有用的,如排列的LCS,状态为2维的(x,y),但对于一个x只有一个y是有效个。所以实质上状态数还是线形的。
4 、阶段划分不明显
(1、2、3 by Amber)
各例分析:
1、一取方格数
m*n 的方格内填上一些数,从1,1出发,只能向上或向右走, 走到m ,n 使得所经方格的数字之和最大。 题目很简单,不说了。 2、 三取方格数
与上题类似,要求走三遍(可以重复),使得三遍所经方格的数字之和最大。
本题的状态表示用到了开始时的表格(一个人走三次=三个
d[num,i,j,k]:=max(d[num-1,i-1,j,k], d[num-1,i-1,j-1,k]
d[num-1,i-1,j-1,k-1], d[num-1,i-1,j,k-1] d[num-1,i,j,k], d[num-1,i-1,j-1,k] d[num-1,i,j-1,k-1], d[num-1,i-1,j,k-1])
d[num ,i ,j ,k]表示三个人在第num 各阶段,的i ,j ,k 位置(i<=j<=k )是的最优值。
3、巡游加拿大(IOI95、USACO)
从东至西有m个城市,其中某些城市之间有航班,让你从最东边的城市出发,坐航班每次只能向西走,走到最西边之后再往回走到最东边的城市(除了两端的城市,其他城市只能经过一次),使得经过的城市数量尽可能多。
(东至西至东==两个人同时向西走且经过的城市不相同)设d[i,j]表示从起点出发,一个人到达i,另一个人到达j时经过的城市数。
因为d[i,j]=d[j,i],所以我们限制i>j。
分析状态(i,j),它可能是(k,j)(j 所以状态转移方程是:d[i,j]=max{d[k,j]+1(k,i可达且 j 时间复杂度O(n3)(by forverstar) 四、环形DP: 题库: 数字游戏(VIJOS) HILL(VIJOS) 看似很难,只要想清楚就可以了。 五、树形DP: 题库: 加分二叉树(NOI、VIJOS) 选课(NOI、VIJOS) 这两道题网上的解题报告很多,我就不罗嗦了。 其他练习题: a)括号序列(Problem B, NEERC 2001) b)多边形(IOI98) c)石子合并(NOI95 2) 构造最优二叉排序树(CTSC96 2) a)整数划分 常应用在将一个权分配给一定的小分割块,如:将大堆的石子分成一定的小堆,小堆可为空,大堆要分完。有时应用在树型动态规划(二叉转多叉)中。 b)乘积最大(NOIP00 Advance 2) 推荐题库:VIJOS动态规划专题 动态规划讲解大全 动态规划(dynamic programming)是运筹学的一个分支,是求解决策过程(decision process)最优化的数学方法。20世纪50年代初美国数学家R.E.Bellman等人在研究多阶段决策过程(multistep decision process)的优化问题时,提出了著名的最优化原理(principle of optimality),把多阶段过程转化为一系列单阶段问题,逐个求解,创立了解决这类过程优化问题的新方法——动态规划。1957年出版了他的名著Dynamic Programming,这是该领域的第一本著作。 动态规划问世以来,在经济管理、生产调度、工程技术和最优控制等方面得到了广泛的应用。例如最短路线、库存管理、资源分配、设备更新、排序、装载等问题,用动态规划方法比用其它方法求解更为方便。 虽然动态规划主要用于求解以时间划分阶段的动态过程的优化问题,但是一些与时间无关的静态规划(如线性规划、非线性规划),只要人为地引进时间因素,把它视为多阶段决策过程,也可以用动态规划方法方便地求解。 动态规划程序设计是对解最优化问题的一种途径、一种方法,而不是一种特殊算法。不象前面所述的那些搜索或数值计算那样,具有一个标准的数学表达式和明确清晰的解题方法。动态规划程序设计往往是针对一种最优化问题,由于各种问题的性质不同,确定最优解的条件也互不相同,因而动态规划的设计方法对不同的问题,有各具特色的解题方法,而不存在一种万能的动态规划算法,可以解决各类最优化问题。因此读者在学习时,除了要对基本概念和方法正确理解外,必须具体问题具体分析处理,以丰富的想象力去建立模型,用创造性的技巧去求解。我们也可以通过对若干有代表性的问题的动态规划算法进行分析、讨论,逐渐学会并掌握这一设计方法。 基本模型 多阶段决策过程的最优化问题。 在现实生活中,有一类活动的过程,由于它的特殊性,可将过程分成若干个互相联系的阶段,在它的每一阶段都需要作出决策,从而使整个过程达到最好的活动效果。当然,各个阶段决策的选取不是任意确定的,它依赖于当前面临的状态,又影响以后的发展,当各个阶段决策确定后,就组成一个决策序列,因而也就确定了整个过程的一条活动路线,如图所示:(看词条图) 这种把一个问题看作是一个前后关联具有链状结构的多阶段过程就称为多阶段决策过程,这种问题就称为多阶段决策问题。 记忆化搜索 给你一个数字三角形, 形式如下: 1 2 3 4 5 6 7 8 9 10 找出从第一层到最后一层的一条路,使得所经过的权值之和最小或者最大. 无论对与新手还是老手,这都是再熟悉不过的题了,很容易地,我们写出状态转移方程:f(i, j)=a[i, j] + min{f(i+1, j),f(i+1, j + 1)} 对于动态规划算法解决这个问题,我们根据状态转移方程和状态转移方向,比较容易地写出动态规划的循环表示方法。但是,当状态和转移非常复杂的时候,也许写出循环式的动态规划就不是那么 入侵检测概念、过程分析和布署 入侵检测概念、过程分析和布署 1、入侵检测的基本概念入侵检测是指“通过对行为、安全日志或审计数据或其它网络上可以获得的信息进行操作,检测到对系统的闯入或闯入的企图”(参见国标GB/T18336)。入侵检测是检测和响应计算机误用的学科,其作用包括威慑、检测、响应、损失情况评估、攻击预测和起诉支持。入侵检测技术是为保证计算机系统的安全而设计与配置的一种能够及时发现并报告系统中未授权或异常现象的技术,是一种用于检测计算机网络中违反安全策略行?募际酢=?腥肭旨觳獾娜砑?胗布?淖楹媳闶侨肭旨觳庀低常↖ntrusion Detection System,简称IDS)。 2、入侵检测系统的发展历史 1980年JamesP.Anderson在给一个保密客户写的一份题为《计算机安全威胁监控与监视》的技术报告中指出,审计记录可以用于识别计算机误用,他给威胁进行了分类,第一次详细阐述了入侵检测的概念。1984年到1986年乔治敦大学的DorothyDenning和SRI公司计算机科学实验室的PeterNeumann研究出了一个实时入侵检测系统模型- IDES(Intrusion Detection Expert Systems入侵检测专家系统),是第一个在一个应用中运用了统计和基于规则两种技术的系统,是入侵检测研究中最有影响的一个系统。1989年,加州大学戴维斯分校的Todd Heberlein写了一篇论文《A Network SecurityMonitor》,该监控器用于捕获TCP/IP分组,第一次直接将网络流作为审计数据来源,因而可以在不将审计数据转换成统一格式的情况下监控异种主机,网络入侵检测从此诞生。 3、系统模型为解决入侵检测系统之间的互操作性,国际上的一些研究组织开展了标准化工作,目前对IDS进行标准化工作的有两个组织:IETF的Intrusion Detection Working Group(IDWG)和Common Intrusion Detection Framework(CIDF)。CIDF早期由美国国防部高级研究计划局赞助研究,现在由CIDF工作组负责,是一个开放组织。 CIDF阐述了一个入侵检测系统(IDS)的通用模型。它将一个入侵检测系统分为以下组件:事件产生器(Event generators),用E盒表示;事件分析器(Event analyzers),用A盒表示;响应单元(Responseunits),用R盒表示;事件数据库(Event databases),用D盒表示。 摘要:状态转移矩阵是现代控制理论的重要概念,在线性控制系统的运动分析中起着重要的作用。分别对连续时间线性时变系统、离散时间线性定常系统以及离散时间线性时变系统的状态转移矩阵进行了研究。根据常微分方程和差分方程解的唯一性,得到了判断矩阵函数是某一线性系统状态转移矩阵的充分条件,以及如何求出其对应的系统矩阵的方法。 状态转移矩阵是现代控制理论的重要概念,在线性控制系统的运动分析中起着重要的作用。 文献[1-8] 对线性系统的状态转移矩阵(包括连续时间线性定常系统、连续时间线性时变系统、离散时间线性定常系统、离散时间线性时变系统)进行了详细而深人的介绍。通常情况下,判断矩阵函数是某一连续时间线性时不变系统的状态转移矩阵的充要条件会在之前的工作中给出。 本文对连续时间线性时变系统、离散时间线性定常系统、离散时间线性时变系统的状态转移矩阵进行了进一步的研究。根据常微分方程和差分方程解的唯一性,得到了判断矩阵函数是某一线性系统状态转移矩阵的充分条件,并求出了其对应的系统矩阵。 1预备知识 考虑连续时间线性时变系统、离散时间线性定常系统和时变系统,它们的齐次状态方程分别为: 其中差分方程部分如下: 为了给出判断矩阵函数是某一线性系统状态转移矩阵的充分条件,需要用到下面的引理。 引理1状态转移矩阵是下列矩阵微分方程初值问题的解,且解是唯一的[5]: 引理2状态转移矩阵是下列矩阵差分方程初值问题的解: 引理3状态转移矩阵是下列矩阵差分方程初值问题的解: 2.1判定结果 2.2讨论 定理1 ~3给出了判定矩阵函数是某一线性系统状态转移矩阵的充分条件,也给出了计算其对应的系统矩阵的公式。由状态转移矩阵的性质可知对连续系统,定理1的条件也是必要的;但对于离散系统,由于状态转移矩阵不能保证必为非奇异[2],所以定理2和定理3的条件不是必要的。但对于连续时间线性系统的时间离散化系统,无论其为时不变或时变系统,状态转移矩阵必为非奇异[2],此时定理2和定理3 的条件是充分必要的。 定理1 ~3给出的条件是非常容易验证的,可使用比较流行的Matlab工具进行验证,因而这些充分条件是有效的。 3结束语 本文对线性系统的状态转移矩阵进行了进一步的讨论,针对连续时间线性时变系统、离散时间线性定常系统和离散时间线性时变系统,分别给出了函数矩阵是某一线性系统状态转移矩阵的充分条件。这些条件是非常容易验证的,因而是有效的,并通过例子说明了结论的正确性。 参考文献 [1 ]王高雄,周之铭,朱思铭,等.常徽分方程[M].2版.北京:高等《自动化仪表》 [2] 郑大钟.线性系统理论[M].2版.北京:清华大学出版社,2002. [3] 刘豹,唐万生.现代控制理论[M].2版.北京:机械工业出版社, 2005. [4] 施颂椒,陈学中,杜秀华.现代控制理论基础[M].北京:高等教育出版社,2007. [5] 王孝武.现代控制理论基础[M].2版.北京:机械工业出版社, 2006. [6] 白素英四种计算方法的比较[J].数学的实践与认识,2008 , 38(2) :156-158. [7] 徐进.常系数齐次线性微分方程组基解矩阵的求解[J].江汉大学学报:自然科学版,2005,33(4): 17-19. [8] 黄承绪.矩阵指数函数的一些性质[J].武汉理工大学学报:交通科学与工程版,2001,25(2) ;147 -149. 一、状态编程思想引入 使用经验法及基本指令编制的程序存在以下一些问题 (1)工艺动作表达繁琐。 (2)梯形图涉及的连锁关系较复杂,处理起来较麻烦。 (3)梯形图可读性差,很难从梯形图看出具体控制工艺过程。 思考:寻求一种易于构思,易于理解的图形程序设计工具。它应有流程图的直观,又有利于复杂控制逻辑关系的分解与综合,这种图就是状态转移图。 引出:状态编辑思想即将一个复杂的控制过程分解为若干个工作状态,弄清各个状态的工作细节(状态的功能、转移条件和转移方向)在依据总的控制顺序要求将这些状态联系起来,形成状态转移图,进而编绘梯形程序,状态转移图是状态编辑的重要工具, 台车自动往返控制的流程图 台车自动往返控制的状态转移图 二、三菱FX2N系列plc的状态元件 三菱plc的状态元件即状态继电器,它是构成状态转移图的重要元件。 三、FX2N系列plc的步进顺控指令 PLC的步进指令有两条:步进节点指令STL和步进返回指令RET。 1、步进接点指令STL 从下图不难看出,转移图中的一个状态在梯形图中用一条步进接点指令表示。STL指令的意义为“激活”某个状态,在梯形图上体现为从主 母线上引出的状态接点,有建立子母线的功能,使该状态的所有操作均在子母线上进行。 其梯形图符号也可用空心绘出,以与普通常开触点区别。“激活” 的第二层意思是采用STL指令编辑的梯形图区间,只有被激活的程序段才被扫描执行,而且在状态转移图的一个单流程中,一次只有一个状态被激活,被激活的状态有自动关闭激活它的前个状态的能力。这样就形成了状态间的隔离,是编程者在考虑某个 状态的工作任务时,不必考虑状态间的连锁 状态转移图与状态梯形图对照 2.步进返回指令RET RET的意义用于返回主母线。梯形图符号为,使步进顺控程序执行完毕后,非状态程序的操作在主母线上完成,防止出现逻辑错误。状态转移程序的结尾必须使用RET指令。 四、运用程序编辑思想解决顺控问题的方法步骤 运用状态编辑思想设计状态转移图的方法和步骤: 步骤1:状态分解,分配状态元件 步骤2:标明状态的功能 步骤3:标明状态的转移条件 台车自动往返状态转移图 步骤1:状态分解,分配状态元件。即将整个过程按任务要求分解,其中的每个工序均对应一个状态,并分配状态元件。 每个工序(或称步)用一矩形方框表示,方框中用文字表示该工序的动作内容或用数字表示该工序的标号。与控制过程的初始状态相对应的步称为初始步,用双线框表示。方框之间用线段连接表示状态间的联系。 例如台车自动往返控制实例中: 第6章状态转移图及编程方法 教学目的及要求:通过教学,使学生明确状态的功能和状态转移图所表示的顺序控制过程,熟练掌握选择性分支与汇合、并行性分支与汇合的应用,掌握顺控系统设计的方法和技能。 教学方式:理论讲解、例题讲解。 演示操作:利用FX2N-64MR PLC实现对自动送料小车的控制。 重点难点:掌握单流程状态图的编程、选择性及并行性分支与汇合的编程。 问题的提出:状态转移图是使用什么语言编程,它与梯形图语言有什么区别。 6.1 状态转移图及状态的功能 6.1.1 状态转移图 用梯形图或指令表方式编程固然广为电气技术人员接受,但对于一个复杂的控制系统,尤其是顺序控制系统,由于内部的联锁、互动关系极其复杂,其梯形图往往长达数百行。另外,在梯形图上如果不加注释,这种梯形图的可读性也会大大降低。 为了解决这个问题,近年来,许多新生产的PLC在梯形图语言之外加上了符合IEC1131—3标准的SFC(Sequential Function Chart)语言,用于编制复杂的顺控程序。IEC1131—3中定义的SFC语言是一种通用的流程图语言。三菱的小型PLC在基本逻辑指令之外增加了两条简单的步进顺控指令(STL,意为Step Ladder;RET,意为返回),同时辅之以大量状态元件,就可以使用状态转移图方式编程。 称为“状态”的软元件是构成状态转移图的基本元素。FX2N共有1000个状态元件,其分类、编号、数量及用途如表6-1所示。 表6-1 FX2N的状态元件 类别元件编号个数用途及特点 初始状态S0~S9 10 用作状态转移图的起始状态 返回状态S10~S19 10 用IST指令时,用作返回原点的状态 通用状态S20~S499 480 用作SFC的中间状态 掉电保持状态S500~S899 400 具有停电保持功能,停电恢复后需继续执行的 场合,可用这些状态元件 信号报警状态S900~S999 100 用作故障诊断或报警元的状态 a状态的编号必须在指定范围选择。 b各状态元件的触点,在PLC内部可自由使用,次数不限。 c在不用步进顺控指令时,状态元件可作为辅助继电器在程序中使用。 d通过参数设置,可改变一般状态元件和掉电保持状态元件的地址分配。 6.1.2 FX2N系列PLC的步进顺控指令 FX2N系列PLC的步进指令有两条:步进接点指令STL和步进返回指令RET。 1、STL:步进接点指令(梯形图符号为) 1.资源问题1 -----机器分配问题 F[I,j]:=max(f[i-1,k]+w[i,j-k]) 2.资源问题2 ------01背包问题 F[I,j]:=max(f[i-1,j-v[i]]+w[i],f[i-1,j]); 3.线性动态规划1 -----朴素最长非降子序列 F[i]:=max{f[j]+1} 4.剖分问题1 -----石子合并 F[i,j]:=min(f[i,k]+f[k+1,j]+sum[i,j]); 5.剖分问题2 -----多边形剖分 F[I,j]:=min(f[i,k]+f[k,j]+a[k]*a[j]*a[i]); 6.剖分问题3 ------乘积最大 f[i,j]:=max(f[k,j-1]*mult[k,i]); 7.资源问题3 -----系统可靠性(完全背包) F[i,j]:=max{f[i-1,j-c[i]*k]*P[I,x]} 8.贪心的动态规划1 -----快餐问题 F[i,j,k]:=max{f[i-1,j',k']+(T[i]-(j-j')*p1-(k-k')*p2) div p3} 9.贪心的动态规划2 -----过河 f[i]=min{{f(i-k)} (not stone[i]) {f(i-k)}+1} (stone[i]); +贪心压缩状态 10.剖分问题4 -----多边形-讨论的动态规划 F[i,j]:=max{正正 f[I,k]*f[k+1,j]; 负负 g[I,k]*f[k+1,j]; 正负 g[I,k]*f[k+1,j]; 负正 f[I,k]*g[k+1,j];} g为min 11.树型动态规划1 -----加分二叉树 (从两侧到根结点模型) 一、 状态编程思想引入 使用经验法及基本指令编制的程序存在以下一些问题 梯形图可读性差,很难从梯形图看出具体控制工艺过程。 思考:寻求一种易于构思,易于理解的图形程序设计工具。它应有流程图的直观, 又有利于复杂控制逻辑关系的分解与综合,这种图就是状态转移图。 引出:状态编辑思想即将一个复杂的控制过程分解为若干个工作状态, 弄清各个 状态的工作细节(状态的功能、转移条件和转移方向)在依据总的控制顺序要求 将这些状态联系起来,形成状态转移图,进而编绘梯形程序,状态转移图是状态 编辑的重要工具, lo V 1 (1) 工艺动作表达繁琐。 (2) 梯形图涉及的连锁关系较复杂,处理起来较麻烦。 SB* -启动《前 逬、 4态功能' I 前述1 和动作 501- H&ig I#二 |— 502- -B 退俸 ear ¥2 动作 吟三I —— 【0上£时前进 工序 倆A ■后退 両五]— 匕怎离R 停 台车自动往返控制的流程图 (3) SB 台车自动往返控制的状态转移图 二、 三菱FX2N 系列pic 的状态元件 三菱pic 的状态元件即状态继电器,它是构成状态转移图的重要元件 三、 FX2N 系列pic 的步进顺控指令 PLC 的步进指令有两条:步进节点指令 STL 和步进返回指令RET 1步进接点指令STL 从下图不难看出,转移图中的一个状态在梯形图中用一条步进接点指令表 示。STL 指令的意义为“激活”某个状态 ,在梯形图上体现为从主 母线上引出的状态接点,有建立子母线的功能,使该状态的所有操作均在子 的第二层意思是采用 STL 指令编辑的梯形图区间,只有被激活的 程序段才被扫描执行,而且在状态转移图的一个单流程中, 一次只有一个状态被激活,被激活的状态有自动关闭激活它 的前个状态的能力。这样就形成了状态间的隔离,是编程者在考虑某个 状态的工作 任务时,不必考虑状态间的连锁 --M8002 SB-TCO [状态继削器〉 〔状态继啣器〉 (状态堆电器〉 [状态继电器> 〔状态筮电器> 审 | (2^ ) f 〈状态转移条件) 他"谁《态转榕条件: TO _ <[状态转移条用 零 「OUT 指? K60 <^OUT 4] ______________ <S ) Voirr 指司 驚|二 V 状态转移条件) S24 ----------------------------- 电J <0UT4&? 523 閃YW ” 也 i an^on. c 〔*tn 母线上进行。 其梯形图符号也可用空心绘出 以与普通常开触点区别 “激活” 动态规划基本原理 近年来,涉及动态规划的各种竞赛题越来越多,每一年的NOI几乎都至少有一道题目需要用动态规划的方法来解决;而竞赛对选手运用动态规划知识的要求也越来越高,已经不再停留于简单的递推和建模上了。 要了解动态规划的概念,首先要知道什么是多阶段决策问题。 一、多阶段决策问题 如果一类活动过程可以分为若干个互相联系的阶段,在每一个阶段都需作出决策(采取措施),一个阶段的决策确定以后,常常影响到下一个阶段的决策,从而就完全确定了一个过程的活动路线,则称它为多阶段决策问题。 各个阶段的决策构成一个决策序列,称为一个策略。每一个阶段都有若干个决策可供选择,因而就有许多策略供我们选取,对应于一个策略可以确定活动的效果,这个效果可以用数量来确定。策略不同,效果也不同,多阶段决策问题,就是要在可以选择的那些策略中间,选取一个最优策略,使在预定的标准下达到最好的效果. 让我们先来看下面的例子:如图所示的是一个带权有向的多段图,要求从A到D的最短 图4-1 带权有向多段图 路径的长度(下面简称最短距离)。 我们可以搜索,枚举图中的每条路径,但当图的规模大起来时,搜索的效率显然不可能尽人意。让我们来试用动态规划的思路分析这道题:从图中可以看到,A点要到达D点必然要经过B1和B2中的一个,所以A到D的最短距离必然等于B1到D的最短距离加上5,或是B2到D的最短距离加上2。同样的,B1到D的最短距离必然等于C1到D的最短距离加上3或是C2到D的最短距离加上2,……。 我们设G[i]为点i到点D的距离,显然G[C1]=4,G[C2]=3,G[C3]=5,根据上面的分析, 有: G[B1]=min{G[C1]+3,G[C2]+2}=5, G[B2]=min{G[C2]+7,G[C3]+4}=9, 再就有G[A]=min{G[B1]+5,G[B2]+2}=10, 所以A到D的最短距离是10,最短路径是A→B1→C2→D。 二、动态规划的术语 1.阶段 把所给求解问题的过程恰当地分成若干个相互联系的阶段,以便于求解,过程不同,阶段数就可能不同.描述阶段的变量称为阶段变量。在多数情况下,阶段变量是离散的,用k 表示。此外,也有阶段变量是连续的情形。如果过程可以在任何时刻作出决策,且在任意两个不同的时刻之间允许有无穷多个决策时,阶段变量就是连续的。 在前面的例子中,第一个阶段就是点A,而第二个阶段就是点A到点B,第三个阶段是点B到点C,而第四个阶段是点C到点D。 2.状态 状态表示每个阶段开始面临的自然状况或客观条件,它不以人们的主观意志为转移,也称为不可控因素。在上面的例子中状态就是某阶段的出发位置,它既是该阶段某路的起点,同时又是前一阶段某支路的终点。 在前面的例子中,第一个阶段有一个状态即A,而第二个阶段有两个状态B1和B2,第三个阶段是三个状态C1,C2和C3,而第四个阶段又是一个状态D。 过程的状态通常可以用一个或”一组数”来描述,称为状态变量。一般,状态是离散的,但有时为了方便也将状态取成连续的。当然,在现实生活中,由于变量形式的限制,所有的状态都是离散的,但从分析的观点,有时将状态作为连续的处理将会有很大的好处。此外,状态可以有多个分量(多维情形),因而用向量来代表;而且在每个阶段的状态维数可以不同。 当过程按所有可能不同的方式发展时,过程各段的状态变量将在某一确定的范围内取值。状态变量取值的集合称为状态集合。 3.无后效性 我们要求状态具有下面的性质:如果给定某一阶段的状态,则在这一阶段以后过程的发 动态规划的特点及其应用 摘要:本文的主要内容就是分析它的特点。第一部分首先探究了动态规划的本质,因为动态规划的特点是由它的本质所决定的。第二部分从动态规划的设计和实现这两个角度分析了动态规划的多样性、模式性、技巧性这三个特点。第三部分将动态规划和递推、搜索、网络流这三个相关算法作了比较,从中探寻动态规划的一些更深层次的特点。文章在分析动态规划的特点的同时,还根据这些特点分析了我们在解题中应该怎样利用这些特点,怎样运用动态规划。这对我们的解题实践有一定的指导意义。本文介绍了动态规划的基本思想和基本步骤,通过实例研究了利用动态规划设计算法的具体途径,讨论了动态规划的一些实现技巧,并将动态规划和其他一些算法作了比较,最后还简单介绍了动态规划的数学理论基础和当前最新的研究成果。 关键词: 动态规划,阶段 1 引言 动态规划是运筹学的一个分支,是求解决策过程最优化的数学方法。20世纪50年代初美国数学家R.E.Bellman 等人在研究多阶段决策过程(multistep decision process)的优化问题时,提出了著名的最优化原理(principle of optimality),把多阶段过程转化为一系列单阶段问题,逐个求解,创立了解决这类过程优化问题的新方法——动态规划。1957年出版了他的名著Dynamic Programming,这是该领域的第一本著作。 动态规划问世以来,在经济管理、生产调度、工程技术和最优控制等方面得到了广泛的应用。例如最短路线、库存管理、资源分配、设备更新、排序、装载等问题,用动态规划方法比用其它方法求解更为方便。 虽然动态规划主要用于求解以时间划分阶段的动态过程的优化问题,但是一些与时间无关的静态规划(如线性规划、非线性规划),只要人为地引进时间因素,把它视为多阶段决策过程,也可以用动态规划方法方便地求解。 2 动态规划的基本思想 一般来说,只要问题可以划分成规模更小的子问题,并且原问题的最优解中包含了子问题的最优解(即满足最优子化原理),则可以考虑用动态规划解决。动态规划的实质是分治思想和解决冗余,因此,动态规划是一种将问题实例分解 第四章动态规划 §1 引言 1.1 动态规划的发展及研究内容 动态规划(dynamic programming)是运筹学的一个分支,是求解决策过程(decision process)最优化的数学方法。20世纪50年代初R. E. Bellman等人在研究多阶段决策过程(multistep decision process)的优化问题时,提出了著名的最优性原理(principle of optimality),把多阶段过程转化为一系列单阶段问题,逐个求解,创立了解决这类过程优化问题的新方法—动态规划。1957年出版了他的名著《Dynamic Programming》,这是该领域的第一本著作。 动态规划问世以来,在经济管理、生产调度、工程技术和最优控制等方面得到了广泛的应用。例如最短路线、库存管理、资源分配、设备更新、排序、装载等问题,用动态规划方法比用其它方法求解更为方便。 虽然动态规划主要用于求解以时间划分阶段的动态过程的优化问题,但是一些与时间无关的静态规划(如线性规划、非线性规划),只要人为地引进时间因素,把它视为多阶段决策过程,也可以用动态规划方法方便地求解。 应指出,动态规划是求解某类问题的一种方法,是考察问题的一种途径,而不是一种特殊算法(如线性规划是一种算法)。因而,它不象线性规划那样有一个标准的数学表达式和明确定义的一组规则,而必须对具体问题进行具体分析处理。因此,在学习时,除了要对基本概念和方法正确理解外,应以丰富的想象力去建立模型,用创造性的技巧去求解。 例1 最短路线问题 下面是一个线路网,连线上的数字表示两点之间的距离(或费用)。试寻求一条由A 到G距离最短(或费用最省)的路线。 例2 生产计划问题 工厂生产某种产品,每单位(千件)的成本为1(千元),每次开工的固定成本为3(千元),工厂每季度的最大生产能力为6(千件)。经调查,市场对该产品的需求量第一、二、三、四季度分别为2,3,2,4(千件)。如果工厂在第一、二季度将全年的需求都生产出来,自然可以降低成本(少付固定成本费),但是对于第三、四季度才能上市的产品需付存储费,每季每千件的存储费为0.5(千元)。还规定年初和年末这种产品均无库存。试制定一个生产计划,即安排每个季度的产量,使一年的总费用(生产成本和存储费)最少。 1.2 决策过程的分类 根据过程的时间变量是离散的还是连续的,分为离散时间决策过程(discrete-time decision process)和连续时间决策过程(continuous-time decision process);根据过程的演变是确定的还是随机的,分为确定性决策过程(deterministic decision process)和随 江苏大学 JIANGSU UNIVERSITY 入侵检测期末论文题目:入侵检测技术 学院: 专业班级: 学号: 姓名: 指导老师: 基本概念 入侵检测是指“通过对行为、安全日志或审计数据或其它网络上可以获得的信息进行操作,检测到对系统的闯入或闯入的企图”(参见国标GB/T18336)。入侵检测是检测和响应计算机误用的学科,其作用包括威慑、检测、响应、损失情况评估、攻击预测和起诉支持。入侵检测技术是为保证计算机系统的安全而设计与配置的一种能够及时发现并报告系统中未授权或异常现象的技术,是一种用于检测计算机网络中违反安全策略行为的技术。进行入侵检测的软件与硬件的组合便是入侵检测系统(IntrusionDetectionSystem,简称IDS)。 发展历史 1980年JamesP.Anderson在给一个保密客户写的一份题为《计算机安全威胁监控与监视》的技术报告中指出,审计记录可以用于识别计算机误用,他给威胁进行了分类,第一次详细阐述了入侵检测的概念。1984年到1986年乔治敦大学的DorothyDenning和SRI公司计算机科学实验室的PeterNeumann研究出了一个实时入侵检测系统模型-IDES(IntrusionDetectionExpertSystems入侵检测专家系统),是第一个在一个应用中运用了统计和基于规则两种技术的系统,是入侵检测研究中最有影响的一个系统。1989年,加州大学戴维斯分校的ToddHeberlein 写了一篇论文《ANetworkSecurityMonitor》,该监控器用于捕获TCP/IP分组,第一次直接将网络流作为审计数据来源,因而可以在不将审计数据转换成统一格式的情况下监控异种主机,网络入侵检测从此诞生。 系统模型 为解决入侵检测系统之间的互操作性,国际上的一些研究组织开展了标准化工作,目前对IDS进行标准化工作的有两个组织:IETF的IntrusionDetectionWorkingGroup(IDWG)和CommonIntrusionDetectionFramework (CIDF)。CIDF早期由美国国防部高级研究计划局赞助研究,现在由CIDF工作组负责,是一个开放组织。 CIDF阐述了一个入侵检测系统(IDS)的通用模型。它将一个入侵检测系统分为以下组件:事件产生器(Eventgenerators),用E盒表示;事件分析器(Eventanalyzers),用A盒表示;响应单元(Responseunits),用R盒表示;事件数据库(Eventdatabases),用D盒表示。 CIDF模型的结构如下:E盒通过传感器收集事件数据,并将信息传送给A 盒,A盒检测误用模式;D盒存储来自A、E盒的数据,并为额外的分析提供信息;R盒从A、E盒中提取数据,D盒启动适当的响应。A、E、D及R盒之间的通信都基于GIDO(generalizedIntrusiondetectionobjects,通用入侵检测对象)和CISL(commonintrusionspecificationlanguage,通用入侵规范语言)。如果想在不同种类的A、E、D及R盒之间实现互操作,需要对GIDO实现标准化并使用CISL。 入侵检测系统 入侵检测系统(intrusion detection system,简称“IDS”)是一种对网络传输进行即时监视,在发现可疑传输时发出警报或者采取主动反应措施的网络安全设备。它与其他网络安全设备的不同之处便在于,IDS是一种积极主动的安全防护技术。IDS最早出现在1980年4月。1980年代中期,IDS逐渐发展成为入侵检测专家系统(IDES)。1990年,IDS分化为基于网络的IDS和基于主机的IDS。后又出现分布式IDS。目前,IDS发展迅速,已有人宣称IDS可以完全取代防火墙。 一、简介 IDS是计算机的监视系统,它通过实时监视系统,一旦发现异常情况就发出警告。IDS入侵检测系统以信息来源的不同和检测方法的差异分为几类:根据信息来源可分为基于主机IDS和基于网络的IDS,根据检测方法又可分为异常入侵检测和滥用入侵检测。不同于防火墙,IDS入侵检测系统是一个监听设备,没有跨接在任何链路上,无须网络流量流经它便可以工作。因此,对IDS的部署,唯一的要求是:IDS应当挂接在所有所关注流量都必须流经的链路上。在这里,"所关注流量"指的是来自高危网络区域的访问流量和需要进行统计、监视的网络报文。在如今的网络拓扑中,已经很难找到以前的HUB式的共享介质冲突域的网络,绝大部分的网络区域都已经全面升级到交换式的网络结构。因此,IDS在交换式网络中的位置一般选择在尽可能靠近攻击源或者尽可能靠近受保护资源的位置。[1]这些位置通常是:服务器区域的交换机上;Internet接入路由器之后的第一台交换机上; 重点保护网段的局域网交换机上。由于入侵检测系统的市场在近几年中飞速发展,许多公司投入到这一领域上来。Venustech(启明星辰)、Internet Security System(ISS)、思科、赛门铁克等公司都推出了自己的产品。 二、系统组成 IETF将一个入侵检测系统分为四个组件: 事件产生器(Event generators),它的目的是从整个计算环境中获得事件,并向系统的其他部分提供此事件。 事件分析器(Event analyzers),它经过分析得到数据,并产生分析结果。 响应单元(Response units ),它是对分析结果作出作出反应的功能单元,它可以作出切断连接、改变文件属性等强烈反应,也可以只是简单的报警。 事件数据库(Event databases )事件数据库是存放各种中间和最终数据的地方的统称,它可以是复杂的数据库,也可以是简单的文本文件。 三、系统缺陷 1998年2月,Secure Networks Inc.指出IDS有许多弱点,主要为:IDS对数据的检测;对IDS自身攻击的防护。由于当代网络发展迅速,网络传输速率大大加快,这造成了IDS工作的很大负担,也意味着IDS 对攻击活动检测的可靠性不高。而IDS在应对对自身的攻击时,对其他传输的检测也会被抑制。同时由于模式识别技术的不完善,IDS的高虚警率也是它的一大问题。 信息学竞赛中的动态规划专题 哈尔滨工业大学周谷越 【关键字】 动态规划动机状态典型题目辅助方法优化方法 【摘要】 本文针对信息学竞赛(面向中学生的Noi以及面向大学生的ACM/ICPC)中的动态规划算法,从动机入手,讨论了动态规划的基本思想和常见应用方法。通过一些常见的经典题目来归纳动态规划的一般作法并从理论上加以分析和说明。并介绍了一些解决动态规划问题时的一些辅助技巧和优化方法。纵观全文可知,动态规划的关键在于把握本质思想的基础上灵活运用。 【目录】 1.动态规划的动机和基本思想 1.1.解决重复子问题 1.2.解决复杂贪心问题 2.动态规划状态的划分方法 2.1.一维状态划分 2.2.二维状态划分 2.3.树型状态划分 3.动态规划的辅助与优化方法 3.1.常见辅助方法 3.2.常见优化方法 4.近年来Noi动态规划题目分析 4.1 Noi2005瑰丽华尔兹 4.2 Noi2005聪聪与可可 4.3 Noi2006网络收费 4.4 Noi2006千年虫 附录参考书籍与相关材料 1.动态规划的动机和基本思想 首先声明,这里所说的动态规划的动机是从竞赛角度出发的动机。 1.1 解决重复子问题 对于很多问题,我们利用分治的思想,可以把大问题分解成若干小问题,然后再把各个小问题的答案组合起来,得到大问题的解答。这类问题的共同点是小问题和大问题的本质相同。很多分治法可以解决的问题(如quick_sort,hanoi_tower等)都是把大问题化成2个以内的不相重复的小问题,解决的问题数量即为∑(log2n / k)。而考虑下面这个问题: USACO 1.4.3 Number Triangles http://122.139.62.222/problem.php?id=1417 【题目描述】 考虑在下面被显示的数字金字塔。 写一个程序来计算从最高点开始在底部任意处结束的路径经过数字的和的最大。每一步可以走到左下方的点也可以到达右下方的点。 7 3 8 8 1 0 2 7 4 4 4 5 2 6 1 在上面的样例中,从7到3到8到7到5的路径产生了最大和:30。 【输入格式】 第一个行包含R(1<= R<=1000) ,表示行的数目。后面每行为这个数字金字塔特定行包含的整数。所有的被供应的整数是非负的且不大于100。 【输出格式】 单独的一行包含那个可能得到的最大的和。 【样例输入】 5 7 3 8 8 1 0 2 7 4 4 4 5 2 6 1 【样例输出】 30 显然,我们同样可以把大问题化成小问题来解决。如样例中最底层的6就可以从次底层 动态规划(生产和存储问题) 一、动态规划法的发展及其研究内容 动态规划是运筹学的一个分支,是求解决策过程最优化的数学方法。20世纪50年代初美国数学家R.E.BELLMAN等人在研究多阶段决策过程的优化问题时,提出了著名的最优化原理,把多阶段问题转化为一系列的单阶段问题,逐个求解 创立了解决这类过程优化问题的新方法——动态规划。1957年出版的他的名著《Dynamic Proggramming》,这是该领域的第一本著作。 动态规划问世以来,在经济管理·生产调度·工程技术和最优控制等方面得到了广泛的应用。例如最短路线·库存管理·资源分配·设备更新·组合·排序·装载等问题,采用动态规划法求解比用其他方法更为简便。 二、动态规划法基本概念 一个多阶段决策过程最优化问题的动态规划模型通常包括以下几个要素: 1.阶段 阶段(stage)是对整个过程的自然划分。通常根据时间顺序或是空间特征来划分阶段,对于与时间,空间无关的“静态”优化问题,可以根据其自然特征,人为的赋予“时段”概念,将静态问题动态化,以便按阶段的顺序解优化问题。阶段变量一般用k=1.2….n.表示。 1.状态 状态(state)是我们所研究的问题(也叫系统)在过个阶段的初始状态或客观条件。它应能描述过程的特征并且具有无后效性,即当某阶段的状态给定时,这个阶段以后的过程的演变与该阶段以前各阶段的状态无关。通常还要求状态是可以直接或者是间接可以观测的。描述状态的变量称为状态变量(State Virable)用s 表示,状态变量的取值集合称为状态集合,用S表示。变量允许取值的范围称为允许状态集合(set of admissble states).用x(k)表示第k阶段的状态变量,它可以是一个数或者是一个向量。用X(k)表示第k阶段的允许状态集合。 n 个阶段的决策过程有n+1个状态变量,x(n+1)是x(n)的演变的结果。 根据演变过程的具体情况,状态变量可以是离散的或是连续的。为了计算方便有时将连续变量离散化,为了分析的方便有时又将离散的变量视为连续的。 2.决策 当一个阶段的状态确定后,可以做出各种选择从而演变 到下一阶段的某个状态,这种选择手段称为决策 (decision),在最优控制问题中也称为控制(control)描述决策的变量称为决策变量(decision virable)。 变量允许取值的范围称为允许决策集合(set of 状态迁移法 一、概念 1.什么是状态迁移法 在定义状态迁移法之前,先介绍一下程序的功能说明。一个程序的功能说明通常由动态说明和静态说明组成。动态说明描述了输入数据的次序或转移的次序。静态说明描述了输入条件与输出条件之间的对应关系。对于较复杂的程序,由于存在大量的组合情况,因此,仅用静态说明组成的规格说明对于测试来说往往是不够的,必须用动态说明来补充功能说明。 功能图方法是用功能图形式化地表示程序的功能说明,并机械地生成功能图的测试用例。功能图模型由状态迁移图和逻辑功能模型构成: (1)状态迁移图用于表示输入数据序列以及相应的输出数据。用状态和迁移 来描述一个状态指出数据输入的位置(或时间),而迁移则指明状态的改 变,同时要依靠判定表或因果图表示的逻辑功能。在状态迁移图中,由 输入数据和当前状态决定输出数据和后续状态。 (2)逻辑功能模型用于表示在状态中输入条件和输出条件之间的对应关系。 逻辑功能模型只适合于描述静态说明,输出数据仅由输入数据决定。 (3)测试用例则是由测试中经过的一系列状态和在每个状态中必须依靠输入 /输出数据满足的一对条件组成。 如何从状态迁移图中选取用例?我们采用节点代替状态,弧线代替迁移,那么状态迁移图就转换成为一个程序的控制流程图,问题也就随之转换为路径测试的问题了。所以,功能图方法其实是是一种黑盒/白盒混合使用的用例设计方法。比如在功能图方法中,用到的逻辑覆盖与路径测试的概念和方法,就是属于白盒测试方法中的内容。(逻辑覆盖是以程序内部的逻辑结构为基础的测试用例设计方法,该方法要求测试人员对程序的逻辑结构有清楚的了解。由于覆盖测试的目标不同,逻辑覆盖可分为:语句覆盖,判定覆盖,判定-条件覆盖,条件组合覆盖及路径覆盖。) 注意:测试人员应当注意区分黑盒测试中系统功能或者系统水平上的逻辑覆 1. 资源问题1 -----机器分配问题 总公司拥有高效生产设备M台,准备分给下属的N个公司。各分公司若获得这些设备,可以为国家提供一定的盈利。问:如何分配这M台设备才能使国家得到的盈利最大?求出最大盈利值。其中M<=15,N<=10。分配原则:每个公司有权获得任意数目的设备,但总台数不得超过总设备数M。 数据文件格式为:第一行保存两个数,第一个数是设备台数M,第二个数是分公司数N。接下来是一个M*N的矩阵,表明了第I个公司分配J台机器的盈利。 用机器数来做状态,数组F[I,J]表示前I个公司分配J台机器的最大盈利。则状态转移方程为: F[I,j]:=max(f[i-1,k]+w[i,j-k]) 2. 资源问题2 ------01背包问题 有N件物品和一个容量为V的背包。第i件物品的费用是c,价值是w。求解将哪些物品装入背包可使这些物品的费用总和不超过背包容量,且价值总和最大。 F[I,j]:=max(f[i-1,j-v[i]]+w[i],f[i-1,j]); 3. 线性动态规划1 -----朴素最长非降子序列 设有由n个不相同的整数组成的数列,记为: a(1),a(2),……,a(n)且a(i)<>a(j) (i<>j) 例如3,18,7,14,10,12,23,41,16,24。 若存在i1且有a(i1)则称为长度为e的不下降序列。如上例中3,18,23,24就是一个长度为4的不下降序列,同时也有3,7,10,12,16,24长度为6的不下降序列。程序要求,当原数列给出之后,求出最长的不下降序列。 F[i]:=max{f[j]+1} 4. 剖分问题1 -----石子合并 在一个园形操场的四周摆放N堆石子(N≤100),现要将石子有次序地合并成一堆。规定每次只能选相邻的两堆合并成新的一堆,并将新的一堆的石子数,记为该次合并的得分。 编一程序,由文件读入堆数N及每堆的石子数(≤20)。 F[i,j]:=min(f[i,k]+f[k+1,j]+sum[i,j]); 5. 剖分问题2 -----多边形剖分 多边形三角剖分是计算几何的一个几何基元.它可以简化问题规模,在计算机图形学、模式识别和地理数据库方面有重要应用. F[I,j]:=min(f[j,k]+f[k,j]+a[k]*a[j]*a[i]); 6. 剖分问题3 ------乘积最大 今年是国际数学联盟确定的“2000——世界数学年”,又恰逢我国著名数学家华罗庚先生诞辰90周年。在华罗庚先生的家乡江苏金坛,组织了一场别开生面的数学智力竞赛的活动,你的一个好朋友XZ也有幸得以参加。活动中,主持人给所有参加活动的选手出了这样一道题目: 设有一个长度为N的数字串,要求选手使用K个乘号将它分成K+1个部分,找出一种分法,使得这K+1个部分的乘积能够为最大。 同时,为了帮助选手能够正确理解题意,主持人还举了如下的一个例子: 有一个数字串:312,当N=3,K=1时会有以下两种分法: 1)3*12=36 2)31*2=62 这时,符合题目要求的结果是:31*2=62动态规划讲解大全(含例题及答案)
入侵检测概念、过程分析和布署
状态转移矩阵判定条件小论文
三菱PLC状态转移图详解知识讲解
状态转移图及编程方法
动态规划状态转移方程
三菱PLC状态转移图详解
动态规划基本原理
动态规划
4第四章 动态规划
入侵检测技术
入侵检测系统
动态规划习题精讲
动态规划(生产和存储问题)
[黑盒测试基本方法]状态迁移法
状态转移方程大全