基于机器视觉的穴盘精密播种性能检测系统

2014年11月
农业机械学报
第45卷增刊
doi :10.6041/j.issn.1000-1298.2014.S0.004
基于机器视觉的穴盘精密播种性能检测系统
*
赵郑斌
1
刘昱程
1
刘忠军
1
高波
2
(1.现代农装科技股份有限公司,北京100083;2.中机美诺科技股份有限公司,北京100083)
摘要:针对穴盘精密播种存在重播、漏播以及播种性能不稳定问题,运用机器视觉技术对穴盘精密播种机进行播种性能检测。在穴盘精密播种机上配置性能检测系统,光电传感器根据穴盘位置触发相机,双相机逐行扫描拍摄穴盘图像,图像数据实时传输到计算机,通过视觉算法软件进行图像分析与处理,识别穴盘的播种状况,检测图像与结果同步显示。播种检测试验表明,系统的重播率检测精度为98.94%,漏播率检测精度为99.33%。关键词:穴盘播种
性能检测
视觉算法
中图分类号:S223.1+
3;TP391.41
文献标识码:A
文章编号:1000-1298(2014)S0-0024-05收稿日期:2014-07-31修回日期:2014-08-24*公益性行业(农业)科研专项经费资助项目(201303014)
作者简介:赵郑斌,工程师,主要从事农业机械设计研究,E-mail :zzbin1702@163.com 通讯作者:刘昱程,高级工程师,主要从事农业装备研究,
E-mail :caamslych@foxmail.com 引言
小粒径种子的机械化穴盘精密播种解决了人工点播存在的生产效率低、劳动强度大、作业成本高、种子用量大和田间管理用工量大等问题
[1]
,目前优
良的气吸式穴盘精密播种机的重播率和漏播率均能满足温室穴盘精密播种机技术条件的要求:空穴率不大于5%,重播率不大于5%
[2]
。昂贵的种子价格
和穴盘单粒播种的特点,对精密播种机播种精度提出了较高要求,但是在长时间的作业中,气吸式精密播种装置会发生吸种不当、吸孔堵塞或落种不畅,影响穴盘播种性能
[3-5]
,不利于后续钵苗的移栽作业。
随着检测技术和智能化技术的发展,对穴盘精密播种性能检测已从传统的光电检测向机器视觉检测方向发展
[6-13]
。胡建平等[14]设计了基于计算机
图像处理技术和单片机控制技术的磁吸式穴盘排种器实时监控系统,采用CCD 摄像头实时监测磁吸头工作情况,并通过计算机图像处理分析统计磁吸头的排种精度,但该系统没有对播后穴盘中种子数量进行分析与处理。齐龙等
[15]
研究了基于机器视觉
的超级稻秧盘育苗播种空穴检测技术,采用CCD 相机拍摄穴盘图像,建立与穴孔相对应的掩模图像,通过图像处理和分析,有效识别穴盘空穴,该检测系统的检测精度较低。本文针对种子的特点和穴盘精密播种的要求,基于机器视觉技术设计穴盘精密播种性能检测系统。
1
硬件设计及工作原理
1.1
硬件设计
播种性能检测系统由台架、相机、白色光源、光
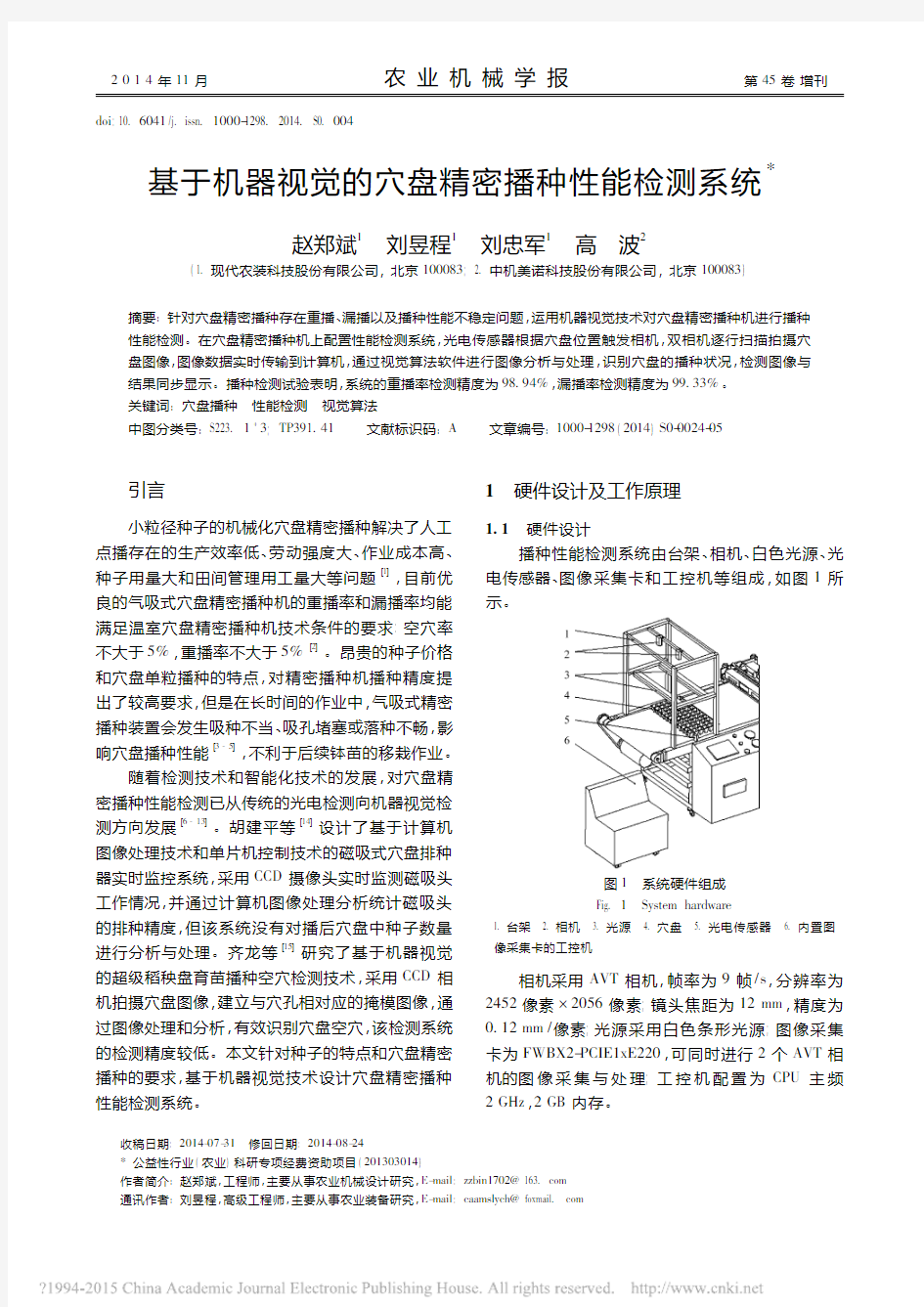
电传感器、图像采集卡和工控机等组成,如图1所示
。
图1系统硬件组成Fig.1
System hardware
1.台架2.相机3.光源
4.穴盘
5.光电传感器
6.内置图
像采集卡的工控机
相机采用AVT 相机,帧率为9帧/s ,分辨率为2452像素?2056像素;镜头焦距为12mm ,精度为0.12mm /像素;光源采用白色条形光源;图像采集
卡为FWBX2-PCIE1xE220,可同时进行2个AVT 相机的图像采集与处理;工控机配置为CPU 主频
2GHz ,2GB 内存。
常见小粒径种子多为浅色或黑色,为便于对不同颜色种子和穴孔的识别,本系统对白色穴盘进行加工处理,使底孔和孔壁为蓝色,穴孔隔断为白色的6穴?12穴的穴盘,如图2所示
。
图2穴盘设计Fig.2
Tray design
常用穴盘尺寸为540mm ?280mm ,穴孔深度为
42 50mm 。相机需要拍摄540mm 长度内的穴盘图像,
结合相机的分辨率和镜头精度,确定使用2个AVT 相机拍摄穴盘图像,2个相机悬挂在穴盘正上方,
每个相机拍摄270mm 尺寸内的穴孔播种状况。相机设置为外触发状态,光电传感器根据穴盘的位置触发拍摄。
考虑穴孔的深度,为确保穴盘底部图像无阴影
区,
设计采用两侧光照方式照亮穴盘底部,交叉光线可确定穴盘底部无阴影区。1.2
工作原理
对于不同规格的穴盘,试验前首先确定穴盘的行数和列数。穴盘放置在传送带上,并随传送带一起运动。光电传感器检测穴盘位置,单次触发,相机逐行扫描拍摄穴盘图像并实时传输到工控机进行图
像的分析与处理,
在工控机上输出穴盘中各个穴孔的种子数和穴盘播种的重播率和漏播率,并储存拍
摄到的播种图像。
2软件设计
采用VC ++可视化集成编程系统和机器视觉
软件包HALCON 设计穴盘精密播种性能检测系统软件部分。软件由相机模块、图像处理模块和主框架3部分组成,软件结构如图3所示。
HALCON 拥有应用广泛的机器视觉集成开发环境,HALCON 机器视觉算法包含了各类滤波、色彩以及几何、数学转换、形态学计算分析、校正、分类辨识、形状搜寻等基本的几何以及影像计算功能,可以满足本软件开发的需求。2.1
相机模块
相机模块控制相机实现对穴盘以及种子图像的拍摄,
并将相机拍摄到的彩色图像传送到工控机,
由图3软件结构
Fig.3
Software structure
图像处理模块对拍摄到的图像进行分析与处理。如
图4所示,以6穴?12穴的穴盘为例,相机拍摄到穴盘的彩色图像,图中黑色的圆点即为种子图像
。
图4相机拍摄的图像
Fig.4
Picture captured by camera
2.2图像处理模块
相机模块拍摄到的图像由图像处理模块进行图像的分析和处理。
Blob Analysis 是对图像中相同灰度的前景像素进行识别的一种方法。Blob 就是灰度相同的前景像素构成的连通域,
Blob 分析可为机器视觉应用提供图像中的Blobs 的数量、位置、形状和方向等信
息,还可以提供相关Blobs 间的几何拓扑结构[16]。本系统运用Blob 分析识别穴孔和种子的位置及数
量,进行种子的分析和计数。
图像分析处理步骤如下:
(1)获取图像:图像处理模块获得相机拍摄到的RGB 图像。
(2)图像通道分析:将相机拍摄的彩色图像拆分为红、蓝、绿不同通道的图像,观察不同通道中穴盘和种子的表现效果,
筛选能够分割穴盘和种子的5
2增刊赵郑斌等:基于机器视觉的穴盘精密播种性能检测系统
图像通道。
将相机拍摄的图像从RGB空间转换为HIS空间,通过图像的色调、饱和度和亮度的变化筛选能够分割穴盘和种子的图像通道。
(3)图像叠加:通过RGB和HIS两种颜色空间对拍摄到的图像进行初步筛选处理,确定使用蓝色通道图像(B)与色调图像(H)的叠加。
(4)穴孔位置分割:在叠加过的蓝色通道图像和色调图像中,使用与蓝色通道易于区分的红色建立筛选框,对图像进行阈值分割获取每个穴孔位置。
(5)穴孔位置过滤:确定穴孔位置后,运用Blob 分析过滤穴孔周围较小的杂点,减少杂点对种子分割和过滤的干扰。
(6)种子分割:在确定好的穴孔区域位置中对图像进行阈值分割获取种子区域。
(7)种子过滤:运用Blob分析过滤种子区域中因噪声而产生的面积很小的杂点。
(8)种子计数:对过滤后的种子区域进行Blob 分析,计算Blob的个数和每个Blob的面积,判断穴孔中种子的个数。
2.3主框架模块
主框架模块提供相机参数设置、图像处理参数设置和检测结果显示功能。
2.3.1相机参数设置
进行相机的曝光时间、白平衡和拍摄间隔等参数设置,确保相机拍摄到完整清晰、亮度合适的穴盘图像。
2.3.2图像处理参数设置
实现检测区域、种子面积阈值、种子分割阈值、穴孔面积阈值和穴孔分割阈值,实现不同规格穴盘的检测,提高软件的通用性和扩展性。以6穴?12穴的穴盘为例,详细介绍图像处理中各个参数值的设置。
(1)检测区域。“检测区域-X”和“检测区域-Y”用于确定检测区域起始坐标,“检测区域-W”和“检测区域-H”用于确定检测区域的大小。试验前安装好光电传感器,通过光电传感器首次触发时穴盘的位置,确定检测区域的数值,本例中X为551,Y为1251,W为1541,H为201。
(2)种子面积阈值。参数范围0 99999,此参数用于过滤面积小于阈值的种子区域,本例中,种子面积阈值为2。
(3)种子分割阈值S
max
和S min。提取灰度范围在S max到S min之间的点作为种子计数区域,S max值要大于S min值,参数范围0 255,参数用于过滤面积小于阈值的空穴区域,本例中,种子分割阈值S max为33,S
min
为1。
(4)穴孔面积阈值。参数范围0 99999,此参数用于过滤面积小于阈值的空穴区域,本例中,穴孔面积阈值为19000。
(5)穴孔分割阈值D
max
和D min。提取灰度范围在D max到D min之间的点作为穴孔区域,D max值要大于
D
min
值,参数范围:0 255,本例中,穴孔分割阈值
D
max
为31,D min为1。
2.3.3检测结果显示
在工控机界面显示穴盘各个穴孔的种子数以及穴盘播种的重播率和漏播率,同时可实时显示相机拍摄到的穴盘图像。如图5所示,左右两侧分别为2个相机拍摄图像处理后的效果图,图中可以看到红色线框框出的穴孔位置,红色框中的绿色部分为种子位置
。
图5图像处理及结果
Fig.5Image processing and result
3试验与结果分析
为确定系统的检测精度,采用机器视觉识别并与人工统计进行对比试验。
3.1试验材料
试验用播种机为针式穴盘精密播种机,播种行数为12行,穴盘规格为6穴?12穴,播种速度为360盘/h。
试验用种子为黑色圆形颗粒状的油菜种子。
3.2试验方法
根据NY/T1823—2009《温室穴盘精密播种机技术条件》[17]的相关规定进行试验。
运行针式穴盘精密播种机,通过调节针嘴的吸种压力,完成播种机在不同条件下的播种。根据检测系统确定穴盘播种的重播率和漏播率,同时,通过人工统计,计算该次穴盘播种的重播率和漏播率,对比2种方法的误差。
3.3试验结果
在播种机上进行500次穴盘试验,试验结果如表1所示。
62农业机械学报2014年
表1试验结果统计Tab.1
Experimental data
%
指标测量值
实际值误差重播率 1.72 2.78 1.06漏播率
2.11 2.78
0.67
播种试验表明,系统的重播率检测精度为
98.94%,漏播率检测精度为99.33%。图像处理中,每幅图像的处理时间为0.3s ,处
理每个穴盘需要1.8s ,
系统每小时可处理穴盘图像2000个,远远大于播种机的播种速度,能够满足穴
盘精密播种机的在线检测。3.4
误差分析
穴盘精密播种系统性能测试装置是一种检测设备,其检测精度直接关系到对育苗精密播种机的性能评估,因此误差对于测试装置检测精度的影响不容忽略。针对测试装置调试数据记录和调试过程中出现的问题,归纳总结可能引起误差的原因:(1)环境光源变化引起的误差
由于种子较小(圆粒油菜种子直径在2mm 左右),而穴盘深度一般在45mm 左右,在光源照射下,将小粒的种子、较深的穴盘以及其他的干扰光区分开是一个难点。本测试装置采用的双摄像头,每个摄像头拍摄6个穴孔。油菜等小粒种子多为黑色,为了与穴盘颜色区分,本装置采用喷涂蓝色底漆的白色穴盘,在白色光源下,便于将每个穴孔及种子分割提取。
在一定的光源下,外界环境光强弱的变化会影响相机对穴盘和种子图像的识别,影响装置的测试精度。因此,在测试装置的应用过程中,应选择环境光源较好的室内,并且尽量避免外界光源的强弱变化对测试对象的影响。
(2)种子形状不均匀引起的误差
本测试装置采用的图像处理软件,
通过对穴盘和种子图像的提取、分割和过滤,实现穴盘种子的计数统计和分析。因此,为提高穴盘种子的识别率,试验前需要对种子进行初步的清选,剔除破损或者形状不规则的种子。
4结论
(1)设计了基于机器视觉的穴盘精密播种机性
能检测装置,
在针式精量播种机上进行了穴盘精密播种性能测试,结果表明,系统的重播率检测精度为
98.94%,漏播率检测精度为99.33%,每幅图像处理时间为0.3s ,可以应用于穴盘精密播种机的检测。
(2)根据穴盘结构特点,设计了基于HALCON 的通用型穴盘精密播种性能检测软件,运用Blob 分析识别穴盘和种子,进行种子的分析和计数。开发了参数设置模块,通过调节种子和空穴参数,实现了不同规格穴盘的检测,提高了软件的通用性和扩展性。
参
考
文献
1
程欢庆,张祖立,张为政.蔬菜穴盘播种装置的研究进展[
J ].农业科技与装备,2010(4):31-33.Cheng Huanqing ,Zhang Zuli ,Zhang Weizheng.Research progress in vegetable plug tray seeding device [J ].Agricultural Science &Technology and Equipment ,2010(4):31-33.(in Chinese )
2
张宁,廖庆喜.我国小粒径种子播种技术与装备的应用与研究进展[
J ].中国农机化,2012(1):93-96,103.Zhang Ning ,Liao Qingxi.Research progress of seeding technology and equipment for small seeds in China [J ].Chinese
Agricultural Mechanization ,
2012(1):93-96,103.(in Chinese )3
武广伟,付卫强,董建军,等.基于组合式排种辊的穴盘播种机的设计与机理分析[
J ].农机化研究,2014(6):14-18.Wu Guangwei ,Fu Weiqiang ,Dong Jianjun ,et al.Design and mechanism analysis of tray seeder based on combined seeding roll [J ].Journal of Agricultural Mechanization Research ,2014(6):14-18.(in Chinese )
4
刘彩玲,宋建农,张广智,等.气吸式水稻钵盘精量播种装置的设计与试验研究[
J ].农业机械学报,2005,36(2):43-46.Liu Cailing ,Song Jiannong ,Zhang Guangzhi ,et al.Design and experimental study on rice precision suction for pot seedling nursery box [J ].Transactions of the Chinese Society for Agricultural Machinery ,2005,36(2):43-46.(in Chinese )
5
范鹏飞,张晋国,王秀,等.设施育苗精准播种机的设计与试验[
J ].农机化研究,2012(7):127-130.Fan Pengfei ,Zhang Jinguo ,Wang Xiu ,et al.Design and experiment on the seedling precision seeder of facility agricultural [J ].Journal of Agricultural Mechanization Research ,2012(7):127-130.(in Chinese )6Karayel D ,Wiesehoff M , zmerzi A ,et al.Laboratory measurement of seed drill seed spacing and velocity of fall of seeds using high-speed camera system [J ].Computers and Electronics in Agriculture ,2006,50(2):89-96.7Leemans V ,Destain M F.A computer-vision based precision seed drill guidance assistance [J ].Computers and Electronics in Agriculture ,2007,59(1-2):1-12.8Pablo M Granitto ,Pablo F Verdes ,Ceccatto H A.Large-scale investigation of weed seed identification by machine vision [J ].Computers and Electronics in Agriculture ,2004,47(1):15-24.
9
马旭,王剑平,胡少兴,等.用图像处理技术检测精密排种器性能[
J ].农业机械学报,2001,32(4):34-37.7
2增刊
赵郑斌等:基于机器视觉的穴盘精密播种性能检测系统
82农业机械学报2014年
Ma Xu,Wang Jianping,Hu Shaoxing,et al.Detection of a precision seedmeter performance using image processing technology[J].Transactions of the Chinese Society for Agricultural Machinery,2001,32(4):34-37.(in Chinese)
10张军,丁元法,李英,等.精密排种器性能检测技术的发展与现状[J].农机化研究,2002(3):16-17,32.
11吴海平,王玉顺,安爱琴,等.精密排种器排种质量的机器视觉检测与分析[J].山西农业大学学报:自然科学版,2008,28(3):324-328.
Wu Haiping,Wang Yushun,An Aiqin,et al.Detection and analysis on seeding quality of metering mechanism of precision drills based on machine vision[J].Journal of Shanxi Agricultural University:Natural Science Edition,2008,28(3):324-328.(in Chinese)
12王玉顺,郭俊旺,赵晓霞,等.基于机器视觉的条播排种器性能检测及分析[J].农业机械学报,2005,36(11):50-54,49.Wang Yushun,Guo Junwang,Zhao Xiaoxia,et al.Performance detection and analysis of a machine vision based metering mechanism of drill[J].Transactions of the Chinese Society for Agricultural Machinery,2005,36(11):50-54,49.(in Chinese)13陈进,边疆,李耀明,等.基于高速摄像系统的精密排种器性能检测试验[J].农业工程学报,2009,25(9):90-95.Chen Jin,Bian Jiang,Li Yaoming,et a1.Performance detection experiment of precision seed metering device based on high-speed camera system[J].Transactions of the CSAE,2009,25(9):90-95.(in Chinese)
14胡建平,陆黎.磁吸式穴盘播种器图像监控系统设计[J].农业机械学报,2006,37(11):88-91.
Hu Jianping,Lu Li.Design of the image monitored control system for the magnetic type precision seeder[J].Transactions of the Chinese Society for Agricultural Machinery,2006,37(11):88-91.(in Chinese)
15齐龙,马旭,周海波.基于机器视觉的超级稻秧盘育秧播种空穴检测技术[J].农业工程学报,2009,25(2):121-125.Qi Long,Ma Xu,Zhou Haibo.Seeding cavity detection in tray nursing seedlings of super rice based on computer vision technology [J].Transactions of the CSAE,2009,25(2):121-125.(in Chinese)
16Milan Sonka,Vaclav Hlavac,Roger Boyle.图像处理、分析与机器视觉[M].3版.艾海舟,译.北京:人民邮电出版社,2010.17NY/T1823—2009温室穴盘精密播种机技术条件[S].2009.
Performance Detection System of Tray Precision Seeder
Based on Machine Vision
Zhao Zhengbin1Liu Yucheng1Liu Zhongjun1Gao Bo2
(1.Modern Agricultural Equipment Co.,Ltd.,Beijing100083,China
2.Menoble Co.,Ltd.,Beijing100083,China)
Abstract:In order to solve the problem of high reseeding,miss-seeding and instability issue in the vegetable tray precision seeder,the seedling performance was detected in the tray precision seeder based on machine vision technology.The performance detective device was setting in the tray precision seeder.
Double-camera took tray images one by one after the tray was detected by photosensor,and then these images were transferred to the computer in real-time.The images were processed and analyzed by the vision algorithm software,the seeds could be seen in the tray and the results and photos were displayed on the screen together.The test showed that the reseeding detection accuracy was98.94%and miss-seeding detection accuracy was99.33%.
Key words:Tray seeder Performance detection Vision algorithm
机器视觉检测系统简述及系统构成
机器视觉检测系统简述及系统构成 1机器视觉检测的一般模式 机器视觉检测的目标千差万别,检测的方式也不尽相同。农产品如苹果、玉米等通常是检测其成熟度,大小,形态等,工业产品如工业零件,印刷电路板通常是检测其几何尺寸,表面缺陷等。不同的应用场合,就需要采用不同的检测设备和检测方法。如有的检测对精度要求高,就需要选择高分辨率的影像采集装置;有的检测需要产品的彩色信息,就需要采用彩色的工业相机装置。正是由于不同检测环境的特殊性,目前世界上还没有一个适用于所有产品的通用机器视觉检测系统。虽然各个检测系统采用的检测设备和检测方法差异很大,但其检测的一般模式却是相同的。机器视觉检测的一般模式是首先通过光学成像和图像采集装置获得产品的数字化图像,再用计算机进行图像处理得到相关检测信息,形成对被测产品的判断决策,最后将该决策信息发送到分拣装置,完成被测产品的分拣。 机器视觉检测的一般模式如图1所示: 图1机器视觉检测的一般模式 1.1图像获取 图像获取是机器视觉检测的第一步,它影响到系统应用的稳定性和可靠性。图像的获取实际上就是将被测物体的可视化图像和内在特征转换成能被计算机处理的图像数据。机器视觉检测系统一般利用光源,光学镜头,相机,图像采集卡等设备获取被测物体的数字化图像。 1.2视觉检测 视觉检测通过图像处理的方法从产品图像中提取需要的信息,做出结果处理并发送相应消息到分拣机构。通常这部分功能由机器视觉软件来完成。优秀的机器视觉软件可对图像中的目标特征进行快速准确地检测,并最大限度地减少对硬件系统的依赖性,而算法设计不够成熟的机器视觉软件则存在检测速度慢,误判率高,对硬件依赖性强等特点。在机器视觉检测系统中视觉信息的处理主要依赖于图像处理方法,它包括图像增强,数据编码和传输,平滑,边缘锐化,分割,特征提取,目标识别与理解等内容。 1.3分拣 对于一个检测系统而言,最终是要实现次品(含不同种类的次品)与合格品的分离即分拣,这部分功能由分拣机构来完成。分拣是机器视觉检测的最后一个也是最为关键的一个环节"对于不同的应用场合,分拣机构可以是机电系统!液压系统!气动系统中的某一种。但无论是哪一种,除了其加工制造和装配精度要严格保证以外,其动态特性,特别是快速性和稳定性也十分重要,必须在设计时予以足够的重视。 2机器视觉检测系统的构成 一个典型的机器视觉检测系统主要包括光源、光学镜头、数字相机、图像采集卡、图像处理模块、分拣机构等部份。其构成如图2所示。 图2典型的机器视觉检测系统 3光源
ITS-高速公路事件检测系统要点
ITS-高速公路事件检测系统 技 术 方 案 浙江捷尚视觉科技有限公司 2010年3月
目录 一、概述 (3) 二、系统特点 (4) 2.1设计原则 (4) 2.2设计依据 (4) 2.3系统应用 (5) 2.4可靠的检测算法 (5) 2.5事件分级报警 (6) 2.6嵌入式设计 (6) 2.7国产本土化服务优势 (7) 2.8远程集中管理 (7) 三、系统组成 (8) 四、系统功能 (10) 4.1全面的事件检测功能 (10) 4.1.1撞车事故检测 (10) 4.1.2车辆抛锚检测 (11) 4.1.3异物抛撒检测 (11) 4.1.4车辆拥堵检测 (12) 4.1.5逆行检测 (12) 4.1.6交通信息采集 (13) 4.2系统自诊断报警功能 (13)
4.3智能化的报警中心 (13) 4.3.1动态视频查看 (14) 4.3.2交通信息量采集 (14) 4.3.3事件提示 (15) 4.3.4信息查询 (15) 4.4关联视频 (16) 4.5交通诱导信息发布 (17) 4.6远程访问 (18) 4.7用户管理 (18) 五、关键设备介绍 (19) 5.1交通信息分析器 (19) 5.1检测摄像机 (20) 5.2摄像机镜头 (20) 六、注意事项 (22)
一、概述 随着我国经济建设的发展,国力的增强,交通事业迅猛发展,机动车数量以每年15%速度快速增长,道路建设不断加快。日益发达的公路网络虽然给人们带来了越来越多的快捷与便利;但在交通现代化的同时也带来了日益繁重的管理负担,为此有关部门为了提高交通管理水平向科技要警力,对能够代替人工进行监视的智能化监视系统的需求日益迫切。 随着各类公路的交通量不断增加,交通事故明显上升,事故或交通堵塞得不到及时检测和处理,必然会降低高速公路运营效率,给高速公路运营公司带来巨大的经济损失。因此,应用高速公路事件检测与管理具有重要意义。 尤其是在高速公路、城市高架、城际快速路、BRT专用车道管理系统中显的尤为重要,在现有的道路监控系统中,大都采用DVR对各监控点进行全天候录像或人工控PTZ对各个路面进行巡检的方式进行监控,采用DVR全天候录像方式,如果出现异常事故工作人员再将视频监控录像调出进行核对,这种方式只能做到事后补救无法做到“即时”发现“即时”处理,而如果对道路上发生的异常情况不能及时排除的话,很容易引发更大的交通事故及车辆大堵塞等问题,存在道路信息处理“滞后”、安全隐患突出的问题;而人工控制PTZ巡检的方式需要消耗大量的人力资源,并且由于人类的视觉疲劳缺陷,即便是一路视频,人眼也很难做到对关键信息完全获取。 ITS-智能交通监控系统是结合智能视觉分析,模式识别、信息传输等技术对路面上所发生的各类事件进行自动检测、自动报警的真正智能化解决方案,系统能实时检测出道路上发生的交通事故、异常停车、异物抛撒、车辆拥堵、车辆逆行、非法变道、道路塌陷等异常状况,并对发生的事件实时进行报警提示。
机器视觉检测系统的工作原理与检测流程【干货】
机器视觉检测系统的工作原理与检测流程 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 在机器视觉检测系统工作流程中,主要分为图像信息获取、图像信息处理和机电系统执行检测结果3个部分,另外根据系统需要还可以实时地通过人机界面进行参数设置和调整。 当被检测的对象运动到某一设定位置时会被位置传感器发现,位置传感器会向PLC控制器发送“探测到被检测物体”的电脉冲信号,PLC控制器经过计算得出何时物体将移动到CCD相机的采集位置,然后准确地向图像采集卡发送触发信号,采集开检测的此信号后会立即要求CCD相机采集图像。被采集到的物体图像会以BMP文件的格式送到工控机,然后调用专用的分析工具软件对图像进行分析处理,得出被检测对象是否符合预设要求的结论,根据“合格”或“不合格”信号,执行机会对被检测物体作出相应的处理。系统如此循环工作,完成对被检测物体队列连续处理。如下图所示。
机器视觉检测系统工作原理 一个完整的机器视觉检测系统的主要工作过程如下: ①工件定位传感器探测到被检测物体已经运动到接近机器视觉摄像系统的视野中心,向机器视觉检测系统的图像采集单元发送触发脉冲。 ②机器视觉检测系统的图像采集单元按照事先设定的程序和延时,分别向摄像机和照明系统发出触发脉冲。 ③机器视觉摄像机停止目前的扫描,重新开始新的一帧扫描,或者机器视觉摄像机在触发脉冲来到之前处于等待状态,触发脉冲到来后启动一帧扫描。 ④机器视觉摄像机开始新的一帧扫描之前打开电子快门,曝光时间可以事先设定。 ⑤另一个触发脉冲打开灯光照明,灯光的开启时间应该与机器视觉摄像机的曝光时间相匹配。 ⑥机器视觉摄像机曝光后,正式开始新一帧图像的扫描和输出。 ⑦机器视觉检测系统的图像采集单元接收模拟视频信号通过A/D转换器将其数字化,或者是直接接收机器视觉摄像机数字化后的数字视频信号。 ⑧处理结果控制生产流水线的动作、进行定位、纠正运动的误差等。 从上述的工作流程可以看出,机器视觉检测系统是一种相对复杂的系统。大多监控和检测对象都是运动的物体,系统与运动物体的匹配和协调动作尤为重要,所以给系统各部分的动作时间和处理速度带来了严格的要求。在某些应用领域,例如机器人、飞行物体制导等,对整个系统或者系统的一部分的重量、体积和功耗等都会有严格的要求。 尽管机器视觉应用各异,归纳一下,都包含一下几个过程: ①图像采集:光学系统采集图像,将图像转换成数字格式并传入计算机存储器。
机器视觉测量技术
机器视觉测量技术杨永跃合肥工业大学 2007.3 目录 第一章绪论 1.1 概述 1.2 机器视觉的研究内容 1.3 机器视觉的应用 1.4 人类视觉简介 1.5 颜色和知觉 1.6 光度学 1.7 视觉的空间知觉 1.8 几何基础 第二章图像的采集和量化 2.1 采集装置的性能指标 2.2 电荷藕合摄像器件 2.3 CCD 相机类 2.4 彩色数码相机 2.5 常用的图像文件格式
2.6 照明系统设计 第三章光学图样的测量 3.1 全息技术 3.2 散斑测量技术 3.3 莫尔条纹测量技术 3.4 微图像测量技术 第四章标定方法的研究 4.1 干涉条纹图数学形成与特征4.2 图像预处理方法 4.3 条纹倍增法 4.4 条纹图的旋滤波算法 第五章立体视觉 5.1 立体成像 2 5.2 基本约束 5.3 边缘匹配 5.4 匹域相关性 5.5 从 x 恢复形状的方法 5.6 测距成像
第六章标定 6.1 传统标定 6.2 Tsais 万能摄像机标定法 6.3 Weng ’ s 标定法 6.4 几何映射变换 6.5 重采样算法 第七章目标图像亚像素定位技术第八章图像测量软件 (多媒体介绍 第九章典型测量系统设计分析9.1 光源设计 9.2 图像传感器设计 9.3 图像处理分析 9.4 图像识别分析 附:教学实验 1、视觉坐标测量标定实验 2、视觉坐标测量的标定方法。 3、视觉坐标测量应用实验 4、典型零件测量方法等。
3 第一章绪论 1.1 概述 人类在征服自然、改造自然和推动社会进步的过程中,面临着自身能力、能量的局限性, 因而发明和创造了许多机器来辅助或代替人类完成任务。智能机器或智能机器人是这种机器最理想的模式。 智能机器能模拟人类的功能、能感知外部世界,有效解决问题。 人类感知外部世界:视觉、听觉、嗅觉、味觉、触觉 眼耳鼻舌身 所以对于智能机器,赋予人类视觉功能极其重要。 机器视觉:用计算机来模拟生物(外显或宏观视觉功能的科学和技术。 机器视觉目标:用图像创建或恢复现实世界模型,然后认知现实世界。 1.2 机器视觉的研究内容 1 输入设备成像设备:摄像机、红外线、激光、超声波、 X 射线、 CCD 、数字扫描仪、超声成像、 CT 等 数字化设备 2 低层视觉(预处理 :对输入的原始图像进行处理(滤波、增强、边缘检测 ,提取角点、边缘、线条色彩等特征。 3 中层视觉:恢复场景的深度、表面法线,通过立体视觉、运动估计、明暗特征、纹理分析。系统标定
机器视觉在线检测系统项目实施流程
随着机器视觉检测技术的日益成熟,越来越多的企业选择安装机器视觉在线检测系统,企业如何做到机器视觉在线检测项目的顺利实施,企业用户对机器视觉在线检测系统设计制作流程的了解至关重要,今天创视新小编在这里整理了整个机器视觉在线检测系统从前期的产品检测评估到系统设备设计制作集成的整个过程做一个简单的介绍: 1、项目的前期评估 A、通过电话联系我们公司,我们公司将会有专业项目工程工程师跟您进行初步的沟通,了解您的需求; B、需要您提供检测样品(OK品和各种NG品数个)以及现场环境,如果不是做整机检测设备的还需要提供视觉设备的安装空间及外围IO通讯。如有需要,项目工程师可以到贵公司进行现场评估; C、根据提供的样品,项目工程师会在公司进行初步的技术评估,一般在收到样品后两个工作日内会给出测试结果; D、项目工程师会根据测试结果,向您提出专业的意见。提供合适的视觉产品(包括工业相机、镜头、光源、电脑、机器视觉系统软件等)给您,然后在测试结果出来后给您提供初步方案及项目费用预估。 E、如对方案存在疑问,可以随时联系项目工程师,项目工程师会对您的疑问进行解答并完善方案,尽力满足您的需求。 2、立项 项目经过初步评估后,双方确认项目方案的可行性,项目工程师接下来会建立一个新项目流程往下进行。 3、检测标准的明确 需要您收集OK品和限度NG品(即初步测试中认为可以检测出来的NG品种类),需要一定数量。项目工程师会对您提供的样品进行测试,详细的检测标准跟您进行确认。 4、其他确认 明确了检测标准后,项目工程师会进一步和您确认检测设备达到安装现场,机械和电气要求;如果贵公司对设备使用有特殊要求的,请及时提出,以便我们进行评估和设计。 5、整体方案书制作、明细报价单、合同制作 项目工程师根据以上的确认制作详细的整体方案,整体包含整机图、视觉系统配置、检测标准、软件功能等。 机器视觉在线检测系统设备设计制作流程
机器视觉检测系统【深度解读】
机器视觉检测系统 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 现代工业自动化生产中涉及到各种各样的检验、生产监视和零件识别应用,如汽车零配件批量加工的尺寸检查和自动装配的完整性检查、电子装配线的元件自动定位、IC上的字符识别等。通常这种带有高度重复性和智能性的工作是由肉眼来完成的,但在某些特殊情况下,如对微小尺寸的精确快速测量、形状匹配以及颜色辨识等,依靠肉眼根本无法连续稳定地进行,其它物理量传感器也难以胜任。人们开始考虑用CCD照相机抓取图像后送入计算机或专用的图像处理模块,通过数字化处理,根据像素分布和亮度、颜色等信息来进行尺寸、形状、颜色等的判别。这种方法是把计算机处理的快速性、可重复性与肉眼视觉的高度智能化和抽象能力相结合,由此产生了机器视觉检测技术的概念。 视觉检测技术是建立在计算机视觉研究基础上的一门新兴测试技术。与计算机视觉研究的视觉模式识别、视觉理解等内容不同,视觉检测技术重点研究的是物体的几何尺寸及物体的位置测量,如轿车白车身三维尺寸的测量、模具等三维面形的快速测量、大型工件同轴度测量以及共面性测量等,它可以广泛应用于在线测量、逆向工程等主动、实时测量过程。视觉检测技术在国外发展很快,早在20世纪80年代,美国国家标准局就曾预计未来90%的检测任务将由视觉检测系统来完成。因此仅在80年代,美国就有100多家公司跻身于视觉检测系统的经营市场,可见视觉检测系统确实很有发展前途。在近几届北京国际机床展览会上已
机器视觉测量技术1.
机器视觉测量技术 杨永跃 合肥工业大学 2007.3
目录第一章绪论 1.1 概述 1.2 机器视觉的研究内容 1.3 机器视觉的应用 1.4 人类视觉简介 1.5 颜色和知觉 1.6 光度学 1.7 视觉的空间知觉 1.8 几何基础 第二章图像的采集和量化 2.1 采集装置的性能指标 2.2 电荷藕合摄像器件 2.3 CCD相机类 2.4 彩色数码相机 2.5 常用的图像文件格式 2.6 照明系统设计 第三章光学图样的测量 3.1 全息技术 3.2 散斑测量技术 3.3 莫尔条纹测量技术 3.4 微图像测量技术 第四章标定方法的研究 4.1 干涉条纹图数学形成与特征 4.2 图像预处理方法 4.3 条纹倍增法 4.4 条纹图的旋滤波算法 第五章立体视觉 5.1 立体成像
5.2 基本约束 5.3 边缘匹配 5.4 匹域相关性 5.5 从x恢复形状的方法 5.6 测距成像 第六章标定 6.1 传统标定 6.2 Tsais万能摄像机标定法 6.3 Weng’s标定法 6.4 几何映射变换 6.5 重采样算法 第七章目标图像亚像素定位技术 第八章图像测量软件 (多媒体介绍) 第九章典型测量系统设计分析9.1 光源设计 9.2 图像传感器设计 9.3 图像处理分析 9.4 图像识别分析 附:教学实验 1、视觉坐标测量标定实验 2、视觉坐标测量的标定方法。 3、视觉坐标测量应用实验 4、典型零件测量方法等。
第一章绪论 1.1 概述 人类在征服自然、改造自然和推动社会进步的过程中,面临着自身能力、能量的局限性,因而发明和创造了许多机器来辅助或代替人类完成任务。智能机器或智能机器人是这种机器最理想的模式。 智能机器能模拟人类的功能、能感知外部世界,有效解决问题。 人类感知外部世界:视觉、听觉、嗅觉、味觉、触觉 眼耳鼻舌身 所以对于智能机器,赋予人类视觉功能极其重要。 机器视觉:用计算机来模拟生物(外显或宏观)视觉功能的科学和技术。 机器视觉目标:用图像创建或恢复现实世界模型,然后认知现实世界。 1.2 机器视觉的研究内容 1 输入设备成像设备:摄像机、红外线、激光、超声波、X射线、CCD、数字扫描仪、 超声成像、CT等 数字化设备 2 低层视觉(预处理):对输入的原始图像进行处理(滤波、增强、边缘检测),提取角 点、边缘、线条色彩等特征。 3 中层视觉:恢复场景的深度、表面法线,通过立体视觉、运动估计、明暗特征、纹理 分析。系统标定 4 高层视觉:在以物体为中心的坐标系中,恢复物体的完整三维图,识别三维物体,并 确定物体的位置和方向。 5 体系结构:根据系统模型(非具体的事例)来研究系统的结构。(某时期的建筑风格— 据此风格设计的具体建筑) 1.3 机器视觉的应用 工业检测—文件处理,毫微米技术—多媒体数据库。 许多人类视觉无法感知的场合,精确定量感知,危险场景,不可见物感知等机器视觉更显其优越十足。 1 零件识别与定位
机器视觉在线检测详解
广东省东莞市莞城区莞太路34号东莞市创意产业中心园区8座502 Unit 502, Building 8, Creative Industry Center Park, No. 34 Guantai Road, Guancheng District, Dong Guan 523000, P.R.China 机器视觉在线检测详解 机器视觉的一个重要应用就是进行在线检测。这个与物体静止时的视觉检测系统不同,最起码图像摄取的速度要足够快才行,不然就不可能在被测物体运动时获取足够清晰的图像,再一个就是机器视觉软件的图像处理能力也要足够强,分析判断周期要够短,不然等反应过来了,产品可能都已经走出次品剔除系统的工作范围了。这样的机器视觉在线检测就是不合格的。 1 机器视觉在线检测的基本原理 基于机器视觉的在线检测系统的基本原理:首先通过视觉传感器获取高速流水线上运动待检测物体图像,图像传送到计算机后,计算机调用专用的图像处理软件来对检测物体进行检测、测量、分析、判断。多功能检测实验平台的硬件结构如图1所示,机器视觉在线检测系统的基本模块包括:传动装置、专用LED光源、图像采集模块、电气控制模块。 2 多功能检测实验平台运动控制部分设计 在这套系统中,运动控制部分选用工业PC+运动控制卡+步进电机的控制模式。运动控制卡是步进电机公司的MPC01。它配备了许多功能强大、内容丰富的运动控制软件工具和函数库。MPC01运动函数库用于二次开发,用户只要用C/C++或Visual Basic等编制所需的用户界面程序,并把它与MPC01
运动库链接起来,就可以开发出自己的控制系统。 3 专用LED光源 光源对图像质量的影响是至关重要的,考虑到本套试验平台将要进行各种物品的检测实验,开发设计了多种专用LED照明方案以适应各种不同的待检物体。直环型用于各种具有稳定照度和清晰图像的工件;狭角型用于各种透明工件或低对比度工件;棒型用于透明、光滑、镀金表面;圆顶型用于不平整或弯曲的表面检测,金属包片上的印刷字体或弯曲表面的孔穴;背光型用于透明材料或液体的检测;同轴型用于光滑、电镀、低反射表面。 4 高速图像采集系统 图像采集部分将完成流水线上的运动图像获取,采集图像质量的好坏将直接影响整个检测效率。图像采集部分主要由CCD摄像机完成。CCD摄像机摄取图像信号,由图像采集卡将图像信号采集进来。本套实验装置选用两个方位的摄像机对待检测物体进行检测,一个俯拍位一个侧拍位,对有些待检测物体可以进行多方位的检测。摄像机采用的是Pulnix公司的TM6703,采集卡选用Matrox 公司的Comora2。 4.1 图像采集卡 Matrox Corona Ⅱ是Matrox Graphics Inc.生产的图像控制器,可采集隔行扫描/逐行扫描的分量RGB信号和单/双路黑白模拟视频信号;3路10bit A/D转换器;24-bit RS-422/LVDS数字接口;模拟情况下采集率达到30MHz,RS-422数字模式下达25MHz,LVDS数字模式下达40MHz;连接2个RGB 或6个模拟黑白视频信号;32-bit/33MHz PCI总线主模式;扩展板上实时采
视觉检测系统报告
视觉检测系统报告 年春季学期研究生课程考核(阅读报告、研究报告)考核科目:视觉测量系统学所在院(系):电气工程及自动化学院学生所在学科:仪器科学与技术学生姓名:***学 号:10S001***学生类别:工学硕士考核结果: 阅卷人: 视觉测量系统课程报告第一部分视觉测量系统发展现状综述机器视觉自起步发展到现在,已有15年的发展历史。应该说机器视觉作为一种应用系统,其功能特点是随着工业自动化的发展而逐渐完善和发展的。 目前全球整个视觉市场总量大概在60~70亿美元,是按照每年 8、8%的增长速度增长的。而在中国,这个数字目前看来似乎有些庞大,但是随着加工制造业的发展,中国对于机器视觉的需求将承上升趋势。 一、机器视觉的定义及特点简言之,机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是指通过机器视觉产品(即图像摄取装置,分CMOS和CCD两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
机器视觉系统的特点是提高生产的柔性和自动化程度。在一些不适合于人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉;同时在大批量工业生产过程中,用人工视觉检查产品质量效率低且精度不高,用机器视觉检测方法可以大大提高生产效率和生产的自动化程度。而且机器视觉易于实现信息集成,是实现计算机集成制造的基础技术。 正是由于机器视觉系统可以快速获取大量信息,而且易于自动处理,也易于同设计信息以及加工控制信息集成,因此,在现代自动化生产过程中,人们将机器视觉系统广泛地用于工况监视、成品检验和质量控制等领域。在中国,这种应用也在逐渐被认知,且带来最直接的反应就是国内对于机器视觉的需求将越来越多。 二、机器视觉在国内外的应用现状在国外,机器视觉的应用普及主要体现在半导体及电子行业,其中大概40%~50%都集中在半导体行业。具体如PCB印刷电路:各类生产印刷电路板组装技术、设备;单、双面、多层线路板,覆铜板及所需的材料及辅料;辅助设施以及耗材、油墨、药水药剂、配件;电子封装技术与设备;丝网印刷设备及丝网周边材料等。SMT表面贴装:SMT工艺与设备、焊接设备、测试仪器、返修设备及各种辅助工具及配件、SMT材料、贴片剂、胶粘剂、焊剂、焊料及防氧化油、焊膏、清洗剂等;再流焊机、波峰焊机及自动化生产线设备。电子生产加工设备:电子元件制造设备、半导体及集成电路制造设备、元
高速公路智能视频监控系统 解决方案
高速公路智能视频监控系统解决方案 目录一、前言.3 二、高速公路智能视频监控系统.3 2.1 系统概述3 2.2 系统构成4 2.3 系统功能5 2.3.1 流量监测.5 2.3.2 烟、火、雾监测.6 2.3.3 违章(超速、违章左/右转、变线、逆行、停车等)8 2.3.4 遗洒物体.9 2.3.5 行人横穿/进入公路.9 三、设备介绍.10 3.1 前端设备10 3.2 视频分析设备11 3.3 终端设备12 四、服务承诺.14 高速公路智能视频监控系统解决方案 一、前言 高速公路是国家经济发展的命脉,是人民大众工作生活不可缺少的重要组成部分.如 何高效、科学的管理高速公路是摆在高速公路管理部门面前的重要议题. 传统的高速公路监控系统主要关注在收费站、服务区、隧道/大桥等.完成车辆收费、 车牌记录、重点地段监控等基本功能.但随着高速公路基础建设的不断完善,对整个高速 公路的总体服务质量也提出了更高的要求.如何即时发现道路上发生的问题,并即时预警 和通知车主,带来更高的客户满意度,是高速公路业主面临一个新的焦点问题. 沈阳天目科技有限公司是由归国留学人员创办的高科技企业,立足于把世界上最先进 的视频分析技术带到中国.基于计算机视觉、人工智能、数字信号处理的视频分析技术使得摄像机具备人脑分析功能,可以实时的对监控画面分析判断并对紧急情况和事件进行处理(显示、报警等).应用到高速公路监控领域,可以自主分析道路情况,实现流量控制、 自动记录各种违章行为、烟、火的自动监测、行人穿道路报警等一系列智能功能.可以说, 视频分析技术将彻底改变传统监控系统被动的录像查询功能,向更智能化、更人性化的方向发展. 二、高速公路智能视频监控系统 2.1 系统概述 传统高速公路监控系统完成的基本功能主要包括进出车辆情况登记和重点路段的情况 监测.车辆情况登记可以通过设置在卡口的车牌识别摄像机和视频摄像机完成,重点路况的监测则需要职守人员自主控制调度多处分布在不同地点的摄像机完成.其缺点在于: 1. 高速公路里程远远超过所安装的摄像机能覆盖的范围,很多路段情况不能够得到及 时有效的处理; 2. 即使安装大量监控摄像机,由于职守人员的精力、注意力有限,不可能同时对所有摄 像机情况进行及时处理; 以上两条造成了高速公路的监控系统只能作为事后查证的依据,没有起到及时发现及时 处理的工具,更没有在危险到来之前主动预警的功能. 高速公路智能视频监控系统解决方案 沈阳天目科技有限公司 4
机器视觉检测
机器视觉检测 一、概念 视觉检测是指通过机器视觉产品(即图像摄取装置,分 CMOS 和CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。 机器视觉检测的特点是提高生产的柔性和自动化程度。 2、典型结构 五大块:照明、镜头、相机、图像采集卡、软件 1.照明 照明是影响机器视觉系统输入的重要因素,它直接影响输入数据的质量和应用效果。目前没有通用的照明设备,具体应用场景选择相应的照明装置。照射方法可分为: 分类具体说明优点 背向照明被测物放在光源和摄像机之 间能获得高对比度的图像 前向照明光源和摄像机位于被测物的 同侧 便于安装 结构光将光栅或线光源等投射到被 测物上,根据它们产生的畸 变,解调出被测物的三维信 息 频闪光照明将高频率的光脉冲照射到物
体上,摄像机拍摄要求与光 源同步 2.镜头 镜头的选择应注意以下几点:焦距、目标高度、影像高度、放大倍数、影响至目标的距离、中心点/节点、畸变。 3.相机 按照不同标准可分为:标准分辨率数字相机和模拟相机等。 要根据不同的实际应用场合选不同的相机和高分辨率相机:线扫描CCD 和面阵CCD;单色相机和彩色相机。 为优化捕捉到的图像,需要对光圈、对比度和快门速度进行调整。 4.图像采集卡 图像采集卡是图像采集部分和图像处理部分的接口。将图像信号采集到电脑中,以数据文件的形式保存在硬盘上。通过它,可以把摄像机拍摄的视频信号从摄像带上转存到计算机中。 5.软件 视觉检测系统使用软件处理图像。软件采用算法工具帮助分析图像。视觉检测解决方案使用此类工具组合来完成所需要的检测。是视觉检测的核心部分,最终形成缺陷的判断并能向后续执行机构发出指令。常用的包括,搜索工具,边界工具,特征分析工具,过程工具,视觉打印工具等。 3、关键——光源的选择 1.光源选型基本要素: 对比度机器视觉应用的照明的最重要的任务就是使需要被观察的特征与需要被忽略的图像特征之间产生最大的对比度,从而易于特
机器视觉在线检测系统项目实施流程
精选文档 随着机器视觉检测技术的日益成熟,越来越多的企业选择安装机器视觉在线检测系统,企业如何做到机器视觉在线检测项目的顺利实施,企业用户对机器视觉在线检测系统设计制作流程的了解至关重要,今天创视新小编在这里整理了整个机器视觉在线检测系统从前期的产品检测评估到系统设备设计制作集成的整个过程做一个简单的介绍: 1、项目的前期评估 A、通过电话联系我们公司,我们公司将会有专业项目工程工程师跟您进行 初步的沟通,了解您的需求; B、需要您提供检测样品(0K品和各种NG品数个)以及现场环境,如果 不是做整机检测设备的还需要提供视觉设备的安装空间及外围I0通讯。如有 需要,项目工程师可以到贵公司进行现场评估; C、根据提供的样品,项目工程师会在公司进行初步的技术评估,一般在收 到样品后两个工作日内会给出测试结果; D、项目工程师会根据测试结果,向您提出专业的意见。提供合适的视觉产品 (包括工业相机、镜头、光源、电脑、机器视觉系统软件等)给您,然后在测 试结果出来后给您提供初步方案及项目费用预估。 E、如对方案存在疑问,可以随时联系项目工程师,项目工程师会对您的疑 问进行解答并完善方案,尽力满足您的需求。 2、立项 项目经过初步评估后,双方确认项目方案的可行性,项目工程师接下来会建 立一个新项目流程往下进行。 3、检测标准的明确 需要您收集0K品和限度NG品(即初步测试中认为可以检测出来的NG品 种类),需要一定数量。项目工程师会对您提供的样品进行测试,详细的检测标准跟您进行确认 精选文档
4、其他确认 明确了检测标准后,项目工程师会进一步和您确认检测设备达到安装现场,机械和电气要求;如果贵公司对设备使用有特殊要求的,请及时提出,以便我们进行评估和设计。 5、整体方案书制作、明细报价单、合同制作 项目工程师根据以上的确认制作详细的整体方案,整体包含整机图、视觉系统配置、检测标准、软件功能等。 机器视觉在线检测系统设备设计制作流程 在签完合同和各方面财务确认后就开始进一步的系统设备的设计制作。 1、客服提供相关的辅料 需要提供不同程度的良品与不良品样品、产品样品外观尺寸和设计品载具。如果需要使用专用载具,请提供专用载具的相关尺寸以提供我们的设计使用。 2、设备整机布置图和电气控制动作流程的确认 我们在收到您提供的相关辅料几个工作日后,提供设备整机布置图和电气控制动作流程给贵公司的责任人确认,如有疑问可以和公司的技术工程师沟通,技术工程师会尽快解决您的问题。 3、机器零件图设计 整机布置图确认后,接着就是进行机械零件的设计。 4、机械、电气标准件的选型 精选文档 整机布置图和电控动作流程确认后,接着就是完成机械、电气标准件的选型。
机器视觉检测系统的最经典结构
机器视觉检测系统的最经典结构一个典型的机器视觉系统主要包括五大块,分别是照明、镜头、相机、图像采集和视觉处理器。 下面,我们就来认识一下这五个结构的用途、特点与工作情况。 照明是影响机器视觉系统输入的重要因素,它直接影响输入数据的质量和应用效果。 照明系统可以将被测物特征最大化,并减少相应的背景中对比物的影响,使高速相机可以清晰地“看见”被测物。 高对比的图像可以降低系统难度并提高系统的稳定性;反之,低对比的图像会增加系统的处理时间并使加大系统的复杂度。 机器视觉应用的成功很大一部分取决于照明设置,一个合适的照明系统可以使整个视觉检测系统更具有效率和准确性。 由于没有通用的机器视觉照明设备,所以针对每个特定的应用实例,要选择相应的照明装置,以达到最佳效果。
光源可分为可见光和不可见光。常用的几种可见光源是白炽灯、日光灯、水银灯和钠 光灯。 可见光的缺点是光能不能保持稳定。如何使光能在一定的程度上保持稳定,是实用化过程中急需要解决的问题。 另一方面,环境光有可能影响图像的质量,所以可采用加防护屏的方法来减少环境光的影响。
照明系统按其照射方法可分为:背向照明、前向照明、结构光和频闪光照明等。 其中,背向照明是被测物放在光源和摄像机之间,它的优点是能获得高对比度的图像。 前向照明是光源和摄像机位于被测物的同侧,这种方式便于安装。 结构光照明是将光栅或线光源等投射到被测物上,根据它们产生的畸变,解调出被测物的三维信息。 频闪光照明是将高频率的光脉冲照射到物体上,摄像机拍摄要求与光源同步。 机器视觉照明要点有使用强光检测缺失的材料、使用合适的波长进行精确定位、使用非散射照明检测玻璃裂缝、使用扩散光检查透明包装、使用颜色来创建对比度等。 相机镜头由多个透镜、可变(亮度)光圈和对焦环组成。使用时由操作者观察相机显示屏来调整可变光圈和焦点,以确保图像的明亮程度及清晰度。 在选择镜头时需要考虑多个方面的因素如焦距、目标高度、影像高度、放大倍数、影像至目标的距离等。 在实际应用中“选择与视场相符的透镜”及“以大景深聚焦图像”是选择镜头时非常重要的两个方面。 机器视觉相机的目的是将通过镜头投影到传感器的图像传送到能够储存、分析和(或者)显示的机器设备上。
高速公路视频检测系统解决方案
第一章视频检测方案概述 1.1 视频检测产品概述 GDW-VD-2002型视频检测器是上海高德威智能交通系统有限公司在多年视频检 测技术研发及应用经验的基础上推出的新型视频检测产品。由于采用了先进的模式识别、图像处理等先进技术,该产品能够对车辆运行过程的动态跟踪,获取全面实时的交通信息。除具有检测区域广、安装运行无干扰、施工维护方便低耗及可视性等一般视频检测产品的优势外,GDW-VD-2002型视频检测器还加强了车辆跟踪技术、硬件设计、检测数据处理软件等方面的功能,并从解决方案、安装与调试、售后服务等角度进行了设计与反复验证,希望能够针对山西的实际需要,通过视频检测这一先进的智能交通信息采集处理技术,为整个高速公路管理系统的建立与完善提供良好的基础。 1.2 工程范围 本次工程包括视频检测系统以下各项设备的生产、运输、安装、调试、试运行及缺陷责任期运行: (1)视频检测摄像机 (2)2路视频复用光端机 (3)视频检测视频处理器 (4)视频处理器机架 (5)视频检测站处理机(收费站) (6)视频检测服务器(监控中心) (7)安装摄像机的架杆 (8)所需的电力电缆和信号电缆(包括电缆及电缆从路边手孔到设备的敷设与连接) (9)规范中没有规定,但对于完成工程所必须的材料及工作
1.3 视频检测系统的总体目标与意义 作为高速公路监控系统实时交通流信息的供应者,上海高德威智能交通系统有限公司的视频检测系统所要实现的总体目标是:通过采集、处理、显示及发布交通流参数、事件、拥挤等动态交通流信息,为高速公路现代化监控系统的建立提供一流的交通信息支持与技术服务。 其主要意义与价值在于: 率先在全国高速公路系统中采用了视频检测这一先进的智能交通技术,是高速公路监控系统信息化、智能化进程中的一次大胆尝试,具有很高的理论价值与实践意义; 视频检测系统除具备施工运行无干扰、维护费用低的特点外,还能兼顾用户“图像监视功能”与“数据检测功能”的双重要求,从而实现了“经济效益”与“使用效果”的双赢; 系统提供的可靠的产品、面向用户需求的解决方案、完善的服务等保证了系统在运行、升级过程中的可持续性发展,从而有助于整个高速公路监控系统信息采集技术与水平的不断提高。 第二章方案设计的基本原则 详细分析高速公路用户需求,提供完善的视频检测系统和可操作性强的解决方案建立视频检测系统,实现交通流信息采集的动态化 不仅要提供视频检测设备,还要提供包括硬件、应用软件及解决方案在内的视频检测系统,使采集到的动态交通流信息能够方便地让用户使用。 确保系统运行的稳定性、可靠性 无论从设备的选型、不同气候、光照条件下的检测算法,还是到具体的实施方案,都要考虑到系统可靠性问题,确保系统正常、稳定、可靠、连续地运行。 确保安装、使用、维护过程的无干扰与方便性 本系统除选择合适的安装地点与方式、保证安装过程对交通流运行的无干扰外,还设置了远程添加删除虚拟线圈和远程诊断维护功能,为日常的运行和维护工作提供最方便的工具与服务。 确保系统运行的经济性
高速公路管理中的交通事件视频检测系统(10.14)
收稿日期:2005209206 作者简介:李为民(19702),男,陕西人,工程师,主要从事高速公路通信、监控系统的规划、设计与施工工作。 高速公路管理中的交通事件视频检测系统 The V ideo D etection System for Traff ic I nc iden t i n M anagm en t of H ighway 李为民1,王长峰2 L iW ei m in 1,W ang Changfeng 2 (1.广西交通科学研究所,广西南宁 530001;2.河南盈科交通工程有限公司,河南郑州 545005) (1.Guangx i Comm un icati on Science In stitu te ,N ann ing ,Guangx i ,530001,Ch ina ;2.H enan Y ingke Comm un icati on Engineering Co .L td .,Zhengzhou ,H enan ,545005,Ch ina ) 摘要:采用背景自动更新技术,实现了一个交通事件视频检测系统。该系统由分析仪、数据服务器和管理器等组成,可对交通事件报警,可在事件事故发生时自动录像,以及进行永久录像、管理员录像、多摄像机录像和外部触发录像,可测量交通参数,可进行远程维护,实现对道路交通安全管理。关键词:视频检测系统 交通事件 参数测量 高速公路 中图法分类号:T P 399;U 412.366 文献标识码:A 文章编号:100227378(2005)S 020086203 Abstact :T h is article in troduces the operating p rinci p le ,system com po siti on and system functi on s of the video detecti on system fo r traffic inciden t to p rom o te the system app licati on s in h ighw ay m anagem en t .T he system is com po sed of analyzer ,data server and m anager .It has m any functi on s such as traffic accidence alar m ing ,accidence video reco rding ,per m anen t video ing ,op erato r video ing ,m u lti 2cam era video ing ,ex ternal triggering video ing ,traffic param eter m easu ring ,and rem o te m ain tenance etc .to realize the safely traffic m anagem en t .Key words :video detecti on system ,traffic inciden t ,m easu re of param eter ,h ighw ay 高速公路交通安全管理是交通管理部门和道路运营部门非常关心的事情。采用交通事件视频检测系统能够直观地监视道路交通状况,实时地对异常状况进行报警和录像,能够实现对道路交通安全管理的需求。 交通事件视频检测报警系统采用道路上和隧道里的监控摄像机图像作为输入,在图像的覆盖范围内,自动检测车辆停驶、交通拥堵、逆行车辆、辆、行人出现、丢弃物品、交通事故等各种事件,并且系统能够快速自动报警和录像,为道路的交通安全管理和道路运营提供极大的帮助。本文介绍交通事件视频检测系统的工作原理、系统组成和功能,以进一步促进该系在高速公路管理中的应用。 1 系统的工作原理 视频交通事件自动检测系统是利用沿线遥控摄 像机采集的视频图像,从图像序列的变化中选取目标信息进行计算处理,对车辆移动轨迹进行分析,根据图像处理算法产生事件告警。该系统采用背景自动更新技术,可适应遥控摄像机的转动和外部环境的变化。 当遥控摄像机一旦停止转动,立刻开始检测。检测开始时,系统先建立一个不变背景图片,然后系统每秒提取摄像机拍摄的数幅图片,比较拍到的图片和背景图片,可以检测到车辆的存在,根据形态辨别过滤标识每一个车辆(一个标记块),算法分析图像序列跟踪标记块(车辆),建立轨迹,新的过滤可剔除无关的轨线,车辆跟踪系统为每一个车辆计算出存在、速度或停车等数据信息。当目标移动的轨迹不符合常规时,系统经过比较测量结果即可得出交通事件数据并发出警报。 2 系统组成 系统的硬件构成见图1。 68广西科学院学报 2005年10月 第21卷增刊
机器视觉检测的分析简答作业及答案要点
2012研究生机器视觉课程检测及课程设计内容 一、回答下列问题: 1、什么是机器视觉,它的目标是什么?能否画出机器视觉检测系统的结构方 块图,并说出它们的工作过程原理和与人类视觉的关系? 机器视觉是机器(通常指计算机)对图像进行自动处理并报告“图像中有什么”的过程,也就是说它识别图像中的内容。图像中的内容往往是某些机器零件,而处理的目标不仅要能对机器零件定位,还要能对其进行检验。 机器视觉系统的组成框图 2、在机器视觉检测技术中:什么是点视觉技术、一维视觉技术、二维视觉技 术、三维视觉技术、运动视觉技术、彩色视觉技术、非可见光视觉技术等? 能否说出他们的应用领域病句、案例?能否描述它们的技术特点? 答:点视觉:用一个独立变量表示的视觉称之为点视觉。如应用位移传感器测量物体的移动速度。 一维视觉:普通的CCD。 两维视觉:用两个独立变量表示的视觉称之为两维视觉。比如普通的CCD。 三维视觉:用三个独立变量表示的视觉称之为三维视觉。比如用两个相机拍摄(双目视觉);或者使用一个相机和一个辅助光源。 彩色视觉:用颜色作为变量的视觉称之为彩色视觉。物体的颜色是由照 射光源的光谱成分、光线在物体上反射和吸收的情况决定的。比如,一 个蓝色物体在日光下观察呈现蓝色,是由于这个物体将日光中的蓝光 反射出来,而吸收了光谱中的其他部分的光谱,而同样的蓝色物体, 在红色的光源照射下,则呈现红紫色, 非可见光视觉技术:用非可见光作为光源的视觉技术。比如非可见光成像技术。
3、机器视觉检测技术中:光源的种类有哪些?不同光源的特点是什么?光照 方式有几种?不同光照方式的用途是什么?又和技术特点和要求? 机器视觉检测技术中光源有以下几种:荧光灯,卤素灯+光纤导管,LED 光源,激光,紫外光等。几种光源的特点如下: 光照方式有以下几种: 背景光法(背光照射)是将被测物置于相机和光源之间。这种照明方式的优点是可将被测物的边缘轮廓清晰地勾勒出来。由于在图像中,被测物所遮挡的部分为黑色,而未遮挡的部分为白色,因此形成“黑白分明”的易于系统分析的图像。此方法被应用于90%的测量系统中。 前景光法(正面照射)是将灯源置于被测物和相机之前。又可分为明场照射和暗场照射。明场照射是为了获得物体的几乎全部信息,照射物体的光在视野范围之内几乎全部反射回去;暗场照射是为了获取物体表面的凹凸,照射物体的光在视野范围之外有部分光反射回去。 同轴光法是将灯源置于被测物和相机之间。 4、机器视觉检测系统中,光学系统的作用是什么?光学器件有哪几种,它们 各自的作用是什么?光学镜头有几种类型,它们各自有何用途?光学镜头有哪些技术参数,各自对测量有什么影响? 答:机器视觉检测系统中,光学系统用来采集物体的轮廓、色彩等信息。 光学器件主要有:镜头、成像器件(CCD和CMOS)、光圈、快门等。 镜头的作用是对成像光线进行调焦等处理,使成像更清晰;成像器件的作用是将光学图像转换成模拟电信号;光圈的作用如同人得瞳孔, 控制入射光的入射量,实现曝光平衡;快门的作用是将想要获取的光学