《自动控制理论(第4版)》第四章习题参考答案

第四章习题参考答案 4-1
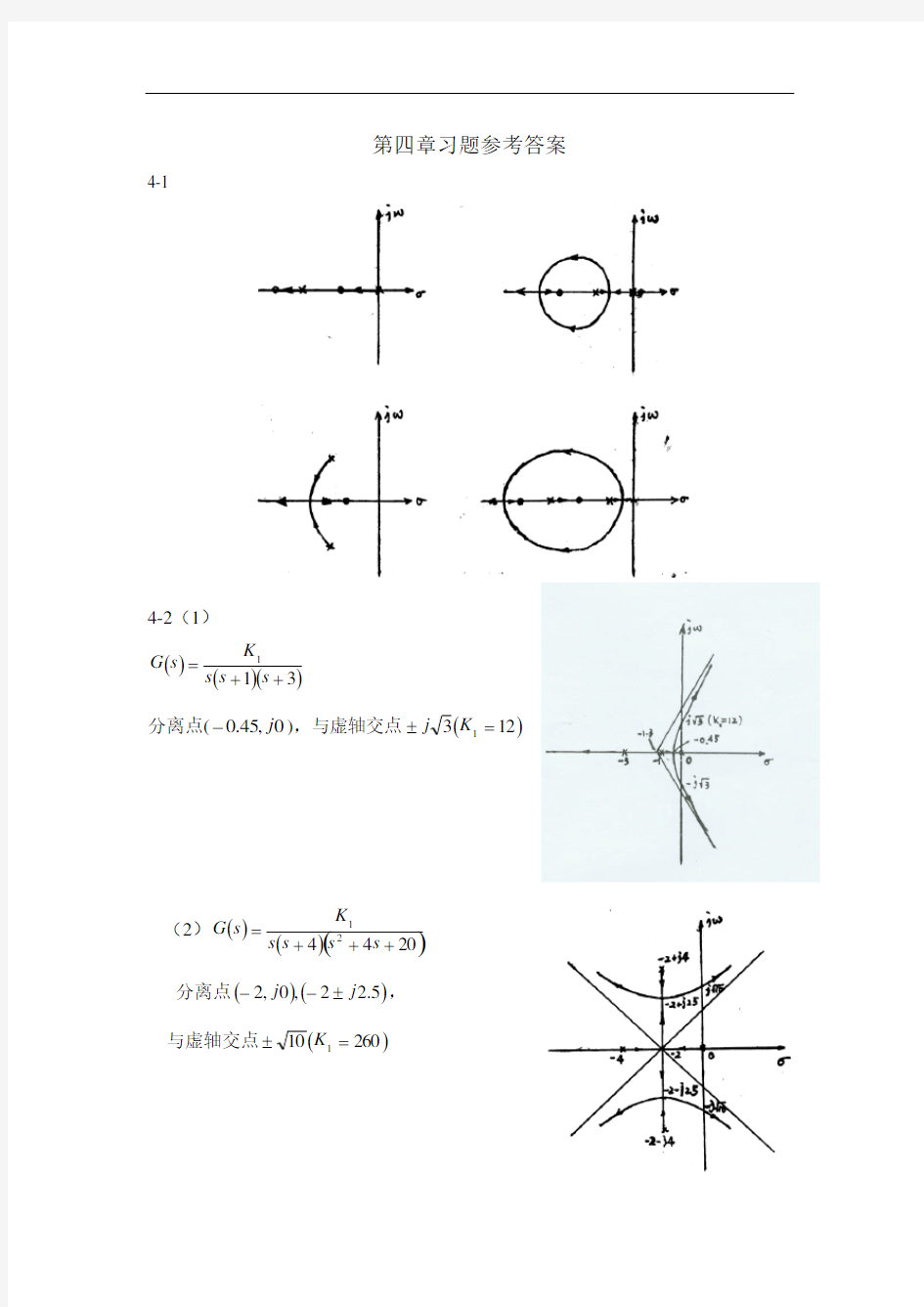
4-2(1)
()()()
311++=s s s K s G 分离点(0,45.0j -),与虚轴交点()1231=±K j
(2)()()()
204421+++=s s s s K s G 分离点()()5.22,0,2j j ±--, 与虚轴交点()260101=±K
4-3
(1)()()
221+=s s K s G 分离点为()0,0j ;从根轨迹图可见,当
01>K 便有二个闭环极点位于右半s 平面。
所以无论K 取何值,系统都不稳定。
(2)
()()()
2121++=s s s K s G 分离点为()0,0j ;从根轨迹图看,
加了零点1-=Z 后,无论K 取何值,系统都是
稳定的。
4-7
系统特征方程为()0112=+++s s α
以α为可变参数可写为0112=+++s s s
α
分离点为()0,1j -,出射角为?=150 P ?。
(1) 无局部反馈时,单位速度输入信号作用
下的稳态误差为1=sr e ;阻尼比为
5.0=ξ;调节时间为()%56s t s =
(2) 2=α时,3=sr e ,5.1=ξ,()???
? ??--==n s s t s t ωξξ1385.72 可见,当加入局部反馈之后,阻尼比变大,调节时间增大,
稳态误差加大。
相关主题