神经网络学习笔记
1 神经网络学习笔记
发表于2016/4/14 22:41:51 3754人阅读
分类: machine-learning
2 神经网络
3 sigmoid函数
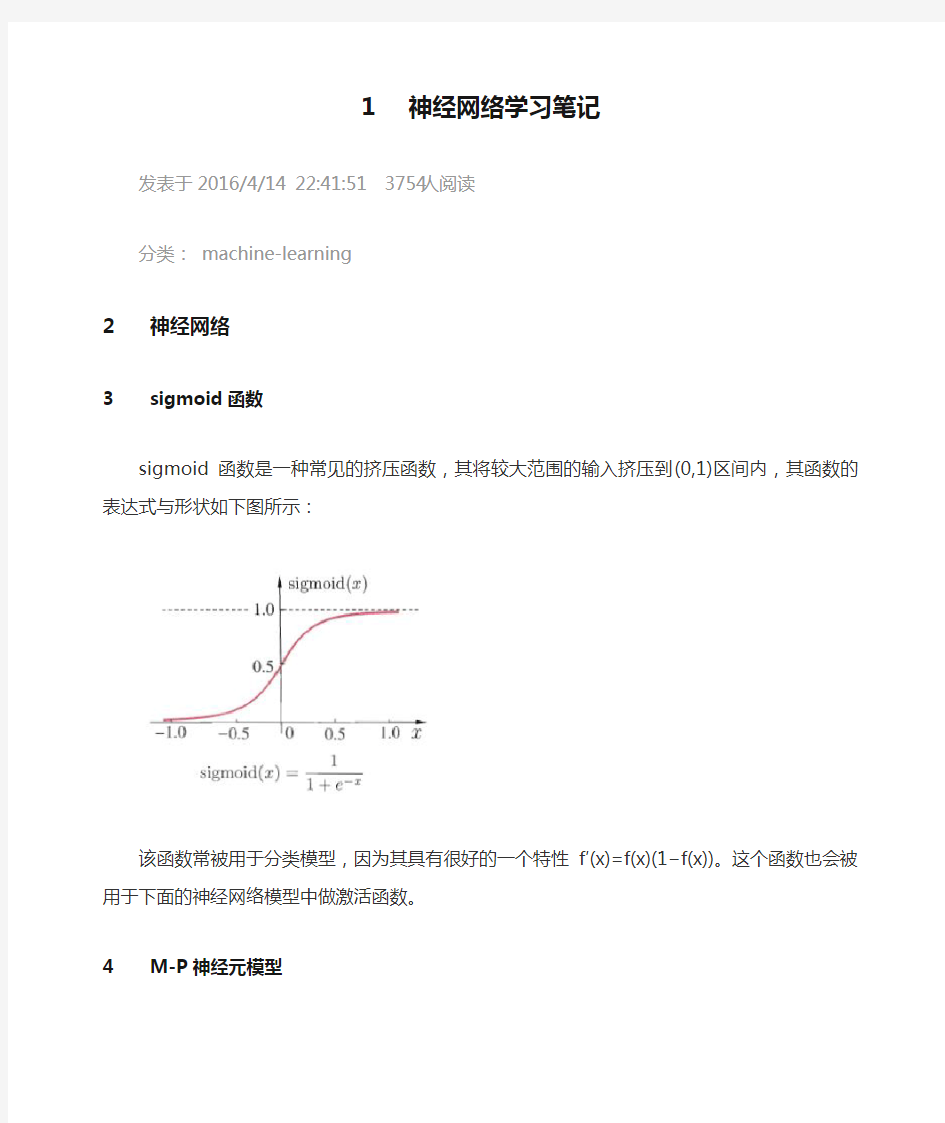
sigmoid函数是一种常见的挤压函数,其将较大范围的输入挤压到(0,1)区间内,其函数的表达式与形状如下图所示:
该函数常被用于分类模型,因为其具有很好的一个特性f′(x)=f(x)(1?f (x))。这个函数也会被用于下面的神经网络模型中做激活函数。
4 M-P神经元模型
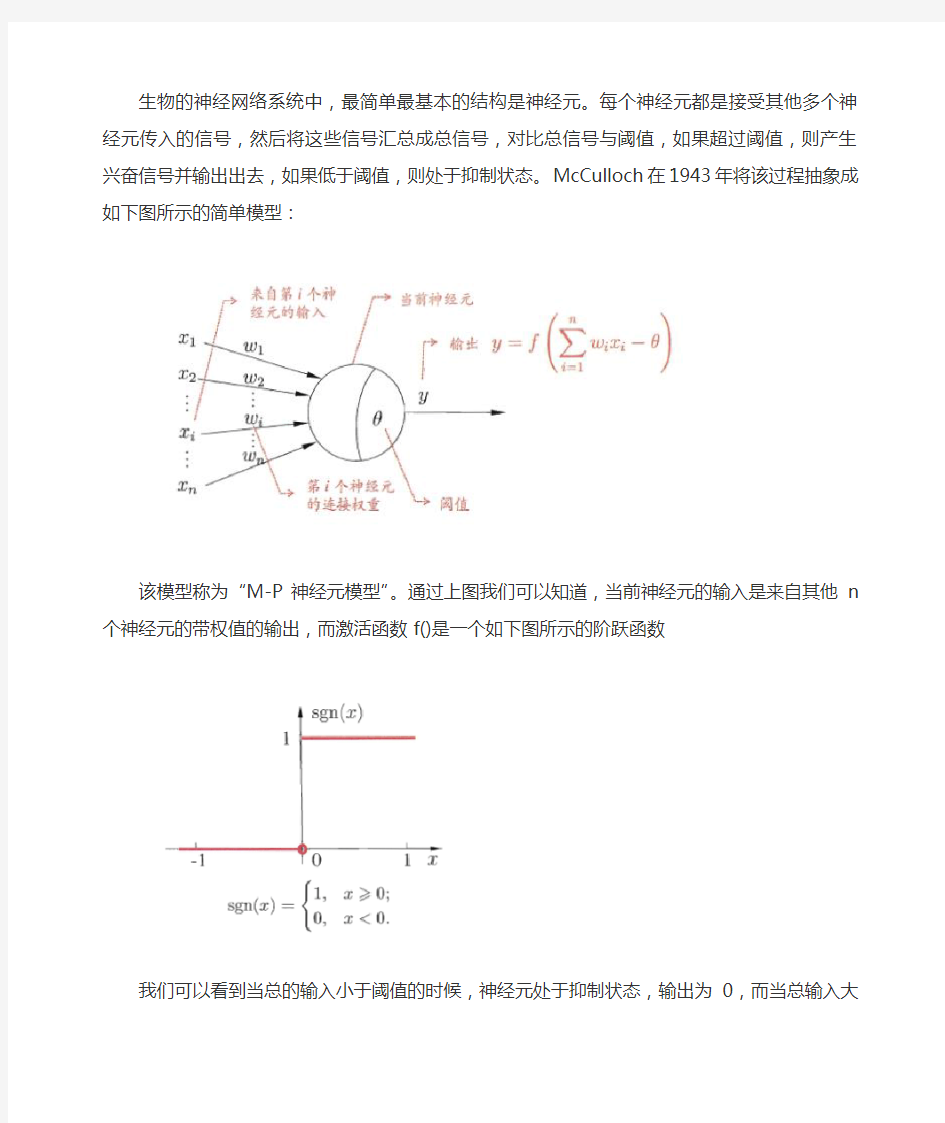
生物的神经网络系统中,最简单最基本的结构是神经元。每个神经元都是接受其他多个神经元传入的信号,然后将这些信号汇总成总信号,对比总信号与阈值,如果超过阈值,则产生兴奋信号并输出出去,如果低于阈值,则处于抑制状态。McCulloch在1 943年将该过程抽象成如下图所示的简单模型:
该模型称为“M-P神经元模型”。通过上图我们可以知道,当前神经元的输入是来自其他
n个神经元的带权值的输出,而激活函数f()是一个如下图所示的阶跃函数
我们可以看到当总的输入小于阈值的时候,神经元处于抑制状态,输出为0,而当总输入大于阈值,则神经元被激活为兴奋状态,输出1。但是我们发现该函数是不连续且不光滑的,使用起来会很不方便,因此在实际应用中常常使用sigmoid函数代替阶跃函数做神经元的激活函数。
5 感知器模型
感知器模型,是一种最简单的神经网络模型结构,其网络结构包括输入层与输出层两层,如下图所示:
其为具有两个输入神经元,一个输出神经元的感知器模型。我们知道该模型是可以做
与或非运算的。这是因为如果我们要做与或非运算,那么对于输入x1,x2来说,其取值只能是0或1,而我们的输出y=f(∑2i=1ωi x i?θ),如果要做与运算,那令阈值ω1=1,ω2=1,θ=2,则只有在x1=1,x2=1的时候才能激活输出层神经元,输出1,其余情况均输出0。同样,如果做或运算,那令阈值ω1=1,ω2=1,θ=1,则只要有一个输入x i=1,即可激活输出神经元,
输出1,如果对x1做非运算,那么可以令阈值ω1=?0.6,ω2=0,θ=
?0.5,则如果x1=1,x2=0,总输入为?0.6,小于阈值,输出0,如果x1=0,x2=0,总输入为0,大于阈值,输出1。这里的激活函数为阶跃函数。这个通过下面的三幅图也可以看得出来
但是我们可以发现,对于只有输入层与输出层的感知机模型,∑2i=1ωi x i?θ是线性的,其只能对线性数据进行划分,对于如下图的异或模型,其实无法准确划分的。
因为任何一条线都无法将(1,0),(0,1)划为一类,(0,0),(1,1)划为一类。但如果是像图(a)中那样的两层网络(这里的两层指的是隐层与输出层,因为只有这两层中的节点是有激活函数的),在隐层有两个节点,那么此时就可以得到两条线
性函数,再在输出节点汇总之后,将会得到由两条直线围成的一个面,如图(b)所示,这时就可以成功的将异或问题解决。
因此我们可以看到,随着网络深度的增加,每一层节点个数的增加,都可以加强网络的表达能力,网络的复杂度越高,其表示能力就越强,也就可以表达更复杂的模型。通过上面你的示例,我们也可以看到,对网络的学习其实主要是对网络中各个节点之间的连接权值和阈值的学习,即寻找最优的连接权值和阈值从而使得该模型可以达到最优(一般是局部最优)。下面主要介绍多隐层前馈神经网络模型参数的学习方法。
6 多隐层前馈神经网络
对于多隐层前馈神经网络,其网络中相邻两层是全连接,而层内是没有连接的,跨层之间也没有连接,如下图所示:
这里是一个单隐层的前馈神经网络,可以看到该网络的参数主要是输入层与隐层之间
的连接权值ωhj,隐层的阈值θ,隐层与输出层之间的连接权值v ih,输出层的阈值r h。这里假设输出层的节点个数为l个,隐层的节点个数为q个,输入层的节点个数为d个,那么我们需要学习的参数个数就为d?q+q+q?l+l个参数,其中d?q与q?l分别是输入层与隐层的连接权值与隐层和输出层的连接权
值个数,q,l分别是隐层和输出层的阈值个数。这样我们就可以将对神经网络的学习问题转化为参数的优化问题。而优化问题最常用的方法就是梯度下降方法,就是让目标参数沿着梯度的方向变化从而达到最优值,即ωi+1=ωi+ηΔω,其中η为步长,Δω为沿梯度方向的变化量。
假设隐层与输出层的激活函数均为sigmoid函数,该网络的输出为Y?=(y?1,...,y?j,...,y?l),那么其第j个节点的输入为βj=∑qi=1ωij b i,其输出y?j=f(βj?r j),那么该网络的均方误差值即为E=12∑li=1(y i ?y?i)2。
这里我们将隐层第h个节点与输出层第j个节点的连接权值ωhj作为优化的目标参数,那么基于梯度下降方法我们知道该参数的变化量
Δωhj=ηδEδωhj
根据链式规则,我们可以将该公式展开
δEδωhj=δEδy?jδy?jδβjδβjδωhj
=y?j?y j,δy?jδβj=y?j(1?y?j),δβjδωhj=b h,因此
其中,δEδy?j
δEδωhj=y?j(1?y?j)(y?j?y j)b h
令g j=y?j(1?y?j)(y?j?y j),那么
Δωhj=ηg j b h
同样的方法,我们可以求出所有其他参数的变化值,依据这些变化值不断调整参数直至收敛。这种学习参数的方法称为标准BP算法(误差逆向传播算法)。
我们可以看到,对于标准BP算法,其每输入一个样本值的时候,就会对参数进行一次更新,当我们的样本量非常大的时候,这种学习方式会耗费大量的时间成本,速度非常的慢,而且对不同的样本进行更新的时候很可能会出现效果抵消的问题。那么我们想如果可以将所有的样本都输入一次后,再对参数进行更新,即将所有的样本的误差都计算一遍,并将这些误差累积,依据累积的误差来对参数进行更新,这样就会快很多。这种方法是可行的,以这种思想为基础的BP算法称为累积BP算法。累积BP 算法的更新频率会低很多,但是该算法在下降到一定程度之后,其再下降的速度就会慢很多。因此对于大部分的算法,其都是首先使用累积梯度下降更新参数,在下降到一定程度之后,再用标准BP算法进行更新。
但是使用BP算法,常常会遇到过拟合的问题,对于过拟合问题,通常采用早停和正则化的两种方式来缓解。其中早停方法比较简单,其就是讲数据集分为训练集和验证集两部分,当训练集的误差降低但验证集的误差升高的时候,就结束训练。而正则化方法则是在计算误差的时候加上一个正则项μ,该正则项用于衡量模型的复杂度,如下所示:
μ=∑iω2i
在增加连接权值和阈值这些参数的平方项之后,使得网络更加倾向于比较小的参数,从而让网络的输出更加平滑,对过拟合有所缓解。
一种递归神经网络在FPGA平台上的实现方案详解
一种递归神经网络在FPGA平台上的实现方案详解 近十年来,人工智能又到了一个快速发展的阶段。深度学习在其发展中起到了中流砥柱的作用,尽管拥有强大的模拟预测能力,深度学习还面临着超大计算量的问题。在硬件层面上,GPU,ASIC,FPGA都是解决庞大计算量的方案。本文将阐释深度学习和FPGA各自的结构特点以及为什么用FPGA加速深度学习是有效的,并且将介绍一种递归神经网络(RNN)在FPGA平台上的实现方案。 揭开深度学习的面纱深度学习是机器学习的一个领域,都属于人工智能的范畴。深度学习主要研究的是人工神经网络的算法、理论、应用。自从2006年Hinton等人提出来之后,深度学习高速发展,在自然语言处理、图像处理、语音处理等领域都取得了非凡的成就,受到了巨大的关注。在互联网概念被人们普遍关注的时代,深度学习给人工智能带来的影响是巨大的,人们会为它隐含的巨大潜能以及广泛的应用价值感到不可思议。 事实上,人工智能是上世纪就提出来的概念。1957年,Rosenblatt提出了感知机模型(Perception),即两层的线性网络;1986年,Rumelhart等人提出了后向传播算法(Back PropagaTIon),用于三层的神经网络的训练,使得训练优化参数庞大的神经网络成为可能;1995年,Vapnik等人发明了支持向量机(Support Vector Machines),在分类问题中展现了其强大的能力。以上都是人工智能历史上比较有代表性的事件,然而受限于当时计算能力,AI总是在一段高光之后便要陷入灰暗时光——称为:“AI寒冬”。 然而,随着计算机硬件能力和存储能力的提升,加上庞大的数据集,现在正是人AI发展的最好时机。自Hinton提出DBN(深度置信网络)以来,人工智能就在不断的高速发展。在图像处理领域,CNN(卷积神经网络)发挥了不可替代的作用,在语音识别领域,RNN (递归神经网络)也表现的可圈可点。而科技巨头也在加紧自己的脚步,谷歌的领军人物是Hinton,其重头戏是Google brain,并且在去年还收购了利用AI在游戏中击败人类的DeepMind;Facebook的领军人物是Yann LeCun,另外还组建了Facebook的AI实验室,Deepface在人脸识别的准确率更达到了惊人的97.35%;而国内的巨头当属百度,在挖来了斯坦福大学教授Andrew Ng(Coursera的联合创始人)并成立了百度大脑项目之后,百
(完整版)深度神经网络及目标检测学习笔记(2)
深度神经网络及目标检测学习笔记 https://youtu.be/MPU2HistivI 上面是一段实时目标识别的演示,计算机在视频流上标注出物体的类别,包括人、汽车、自行车、狗、背包、领带、椅子等。 今天的计算机视觉技术已经可以在图片、视频中识别出大量类别的物体,甚至可以初步理解图片或者视频中的内容,在这方面,人工智能已经达到了3岁儿童的智力水平。这是一个很了不起的成就,毕竟人工智能用了几十年的时间,就走完了人类几十万年的进化之路,并且还在加速发展。 道路总是曲折的,也是有迹可循的。在尝试了其它方法之后,计算机视觉在仿生学里找到了正确的道路(至少目前看是正确的)。通过研究人类的视觉原理,计算机利用深度神经网络(Deep Neural Network,NN)实现了对图片的识别,包 括文字识别、物体分类、图像理解等。在这个过程中,神经元和神经网络模型、大数据技术的发展,以及处理器(尤其是GPU)强大的算力,给人工智能技术 的发展提供了很大的支持。 本文是一篇学习笔记,以深度优先的思路,记录了对深度学习(Deep Learning)的简单梳理,主要针对计算机视觉应用领域。 一、神经网络 1.1 神经元和神经网络 神经元是生物学概念,用数学描述就是:对多个输入进行加权求和,并经过激活函数进行非线性输出。 由多个神经元作为输入节点,则构成了简单的单层神经网络(感知器),可以进行线性分类。两层神经网络则可以完成复杂一些的工作,比如解决异或问题,而且具有非常好的非线性分类效果。而多层(两层以上)神经网络,就是所谓的深度神经网络。 神经网络的工作原理就是神经元的计算,一层一层的加权求和、激活,最终输出结果。深度神经网络中的参数太多(可达亿级),必须靠大量数据的训练来“这是苹在父母一遍遍的重复中学习训练的过程就好像是刚出生的婴儿,设置。.果”、“那是汽车”。有人说,人工智能很傻嘛,到现在还不如三岁小孩。其实可以换个角度想:刚出生婴儿就好像是一个裸机,这是经过几十万年的进化才形成的,然后经过几年的学习,就会认识图片和文字了;而深度学习这个“裸机”用了几十年就被设计出来,并且经过几个小时的“学习”,就可以达到这个水平了。 1.2 BP算法 神经网络的训练就是它的参数不断变化收敛的过程。像父母教婴儿识图认字一样,给神经网络看一张图并告诉它这是苹果,它就把所有参数做一些调整,使得它的计算结果比之前更接近“苹果”这个结果。经过上百万张图片的训练,它就可以达到和人差不多的识别能力,可以认出一定种类的物体。这个过程是通过反向传播(Back Propagation,BP)算法来实现的。 建议仔细看一下BP算法的计算原理,以及跟踪一个简单的神经网络来体会训练的过程。
神经网络C语言实现
#i n c l u d e"" #include <> const double e = ; //设置一个神经网络 //有一个隐藏层(含有两个节点) //输出层有一个节点 //输入数据是二维(两个节点) //一个样本数据为:x = , 标签为 //初始权值输入节点1到隐藏层:, //输入节点2到隐藏层:, //隐藏层到输出层初始权值为:, //学习速率为1 double changeWeightFromHiddenToOutput(double cost,double output,double hiddenLayerCode) { double result=0; result = cost*output*(1-output)*hiddenLayerCode; return result; } double changeWeightFromInputToHidden(double cost,double output,double weightOfHiddenCodeToOutput,double weightOfHiddenCode,double inputNum)
double result=0; result = cost*output*(1-output)*weightOfHiddenCodeToOutput*weightOfHiddenC ode*(1-weightOfHiddenCode)*inputNum; return result; } double sigmoidFunction(double x) { double result=0; result = 1/(1+pow(e,-x)); return result; } double costFunction(double originalSignal,double outputOfOurCalculation) { //此处采取的损失函数是最小二乘法 double cost=0; cost = (1/*(originalSignal-outputOfOurCalculation)*(originalSignal-outpu tOfOurCalculation); return cost;
(完整版)深度神经网络全面概述
深度神经网络全面概述从基本概念到实际模型和硬件基础 深度神经网络(DNN)所代表的人工智能技术被认为是这一次技术变革的基石(之一)。近日,由IEEE Fellow Joel Emer 领导的一个团队发布了一篇题为《深度神经网络的有效处理:教程和调研(Efficient Processing of Deep Neural Networks: A Tutorial and Survey)》的综述论文,从算法、模型、硬件和架构等多个角度对深度神经网络进行了较为全面的梳理和总结。鉴于该论文的篇幅较长,机器之心在此文中提炼了原论文的主干和部分重要内容。 目前,包括计算机视觉、语音识别和机器人在内的诸多人工智能应用已广泛使用了深度神经网络(deep neural networks,DNN)。DNN 在很多人工智能任务之中表现出了当前最佳的准确度,但同时也存在着计算复杂度高的问题。因此,那些能帮助DNN 高效处理并提升效率和吞吐量,同时又无损于表现准确度或不会增加硬件成本的技术是在人工智能系统之中广泛部署DNN 的关键。 论文地址:https://https://www.360docs.net/doc/6e15387729.html,/pdf/1703.09039.pdf 本文旨在提供一个关于实现DNN 的有效处理(efficient processing)的目标的最新进展的全面性教程和调查。特别地,本文还给出了一个DNN 综述——讨论了支持DNN 的多种平台和架构,并强调了最新的有效处理的技术的关键趋势,这些技术或者只是通过改善硬件设计或者同时改善硬件设计和网络算法以降低DNN 计算成本。本文也会对帮助研究者和从业者快速上手DNN 设计的开发资源做一个总结,并凸显重要的基准指标和设计考量以评估数量快速增长的DNN 硬件设计,还包括学界和产业界共同推荐的算法联合设计。 读者将从本文中了解到以下概念:理解DNN 的关键设计考量;通过基准和对比指标评估不同的DNN 硬件实现;理解不同架构和平台之间的权衡;评估不同DNN 有效处理技术的设计有效性;理解最新的实现趋势和机遇。 一、导语 深度神经网络(DNN)目前是许多人工智能应用的基础[1]。由于DNN 在语音识别[2] 和图像识别[3] 上的突破性应用,使用DNN 的应用量有了爆炸性的增长。这些DNN 被部署到了从自动驾驶汽车[4]、癌症检测[5] 到复杂游戏[6] 等各种应用中。在这许多领域中,DNN 能够超越人类的准确率。而DNN 的出众表现源于它能使用统计学习方法从原始感官数据中提取高层特征,在大量的数据中获得输入空间的有效表征。这与之前使用手动提取特征或专家设计规则的方法不同。 然而DNN 获得出众准确率的代价是高计算复杂性成本。虽然通用计算引擎(尤其是GPU),已经成为许多DNN 处理的砥柱,但提供对DNN 计算更专门化的加速方法也越来越热门。本文的目标是提供对DNN、理解DNN 行为的各种工具、有效加速计算的各项技术的概述。 该论文的结构如下:
BP神经网络模型应用实例
BP神经网络模型 第1节基本原理简介 近年来全球性的神经网络研究热潮的再度兴起,不仅仅是因为神经科学本身取得了巨大的进展.更主要的原因在于发展新型计算机和人工智能新途径的迫切需要.迄今为止在需要人工智能解决的许多问题中,人脑远比计算机聪明的多,要开创具有智能的新一代计算机,就必须了解人脑,研究人脑神经网络系统信息处理的机制.另一方面,基于神经科学研究成果基础上发展出来的人工神经网络模型,反映了人脑功能的若干基本特性,开拓了神经网络用于计算机的新途径.它对传统的计算机结构和人工智能是一个有力的挑战,引起了各方面专家的极大关注. 目前,已发展了几十种神经网络,例如Hopficld模型,Feldmann等的连接型网络模型,Hinton等的玻尔茨曼机模型,以及Rumelhart等的多层感知机模型和Kohonen的自组织网络模型等等。在这众多神经网络模型中,应用最广泛的是多层感知机神经网络。多层感知机神经网络的研究始于50年代,但一直进展不大。直到1985年,Rumelhart等人提出了误差反向传递学习算法(即BP算),实现了Minsky的多层网络
设想,如图34-1所示。 BP 算法不仅有输入层节点、输出层节点,还可有1个或多个隐含层节点。对于输入信号,要先向前传播到隐含层节点,经作用函数后,再把隐节点的输出信号传播到输出节点,最后给出输出结果。节点的作用的激励函数通常选取S 型函数,如 Q x e x f /11)(-+= 式中Q 为调整激励函数形式的Sigmoid 参数。该算法的学习过程由正向传播和反向传播组成。在正向传播过程中,输入信息从输入层经隐含层逐层处理,并 传向输出层。每一层神经元的状态只影响下一层神经
1BP神经网络实现(JAVA代码)
BP神经网络实现(Java代码) 神经网络的原理虽然理解起来不难,但是要是想实现它,还是需要做一些工作的,并且有很多细节性的东西需要注意。通过参阅各种相关资料,以及参考网络上已有的资源,自己写了一个含有一个隐含层,且只能有一个输出单元的简单的BP网络,经过测试,达到了预期的效果。 需要说明的是,神经网络的每个输入都在[0,1]中,输出也在[0,1]中,在使用神经网络解决实际问题的时候,还需要对实际问题的输入输出进行归一化处理。另外,尽量不要使得神经网络的输入或输出接近于0或1,这样会影响拟合效果。 我用正弦函数进行了一次测试,效果如图所示: 以下是相关的代码: 1.神经网络代码 [java]view plaincopy 1.package pkg1; 2. 3.import java.util.Scanner; 4. 5./* 6.* 7.*/ 8.public class TestNeuro{
9. 10.private int INPUT_DIM=1; 11.private int HIDDEN_DIM=20; 12.private double LEARNING_RATE=0.05; 13.double[][]input_hidden_weights=new double[INPUT_DIM][HIDDEN_DIM]; 14.double[]hidden_output_weights=new double[HIDDEN_DIM]; 15.double[]hidden_thresholds=new double[HIDDEN_DIM]; 16.double output_threshold; 17. 18.public static void main(String[]args){ 19.Scanner in=new Scanner(System.in); 20.TestNeuro neuro=new TestNeuro(1,5); 21.neuro.initialize(); 22.for(int i=0;i<10000;i++){ 23.double[]input=new double[1]; 24.input[0]=Math.random(); 25.double expectedOutput=input[0]*input[0]; 26.//System.out.println("input:"+input[0]+"\t\texpectedOutput: "+expectedOutput); 27.//System.out.println("predict before training:"+neuro.predict (input)); 28.neuro.trainOnce(input,expectedOutput); 29.//System.out.println("predict after training:"+neuro.predict( input)); 30.//in.next(); 31.} 32.while(true){ 33.//neuro.printLinks(); 34.double[]input=new double[1]; 35.input[0]=in.nextDouble(); 36.double expectedOutput=in.nextDouble(); 37.System.out.println("predict before training:"+neuro.predict(i nput)); 38.neuro.trainOnce(input,expectedOutput); 39.System.out.println("predict after training:"+neuro.predict(in put)); 40. 41.} 42.} 43. 44.public TestNeuro(int input_dimension,int hidden_dimension){ 45.this.INPUT_DIM=input_dimension; 46.this.HIDDEN_DIM=hidden_dimension; 47.this.initialize();
基于matlab实现BP神经网络模型仿真
基于BP神经网络模型及改进模型对全国历年车祸次数预测 一、背景 我国今年来随着经济的发展,汽车需求量不断地增加,所以全国每年的车祸次数也被越来越被关注,本文首先搜集全国历年车祸次数,接着通过这些数据利用BP神经网络模型和改进的径向基函数网络进行预测,最后根据预测结果,分析模型的优劣,从而达到深刻理解BP神经网络和径向基函数网络的原理及应用。所用到的数据即全国历年车祸次数来自中国汽车工业信息网,网址如下: https://www.360docs.net/doc/6e15387729.html,/autoinfo_cn/cszh/gljt/qt/webinfo/2006/05/124650 1820021204.htm 制作历年全国道路交通事故统计表如下所示: 二、问题研究 (一)研究方向 (1)通过数据利用BP神经网络模型预测历年全国交通事故次数并与实际值进行比较。(2)分析BP神经网络模型改变训练函数再进行仿真与之前结果进行对比。 (3)从泛化能力和稳定性等方面分析BP神经网络模型的优劣。 (4)利用径向基函数网络模型进行仿真,得到结果与采用BP神经网络模型得到的结果进行比较。
(二)相关知识 (1)人工神经网络 人工神经网络是一种应用类似于大脑神经突触联接的结构进行信息处理的数学模型。在工程与学术界也常直接简称为神经网络或类神经网络。神经网络是一种运算模型,由大量的节点(或称神经元)和之间相互联接构成。每个节点代表一种特定的输出函数,称为激励函数(activation function)。每两个节点间的连接都代表一个对于通过该连接信号的加权值,称之为权重,这相当于人工神经网络的记忆。网络的输出则依网络的连接方式,权重值和激励函数的不同而不同。而网络自身通常都是对自然界某种算法或者函数的逼近,也可能是对一种逻辑策略的表达。 人工神经网络有以下几个特征: (1)非线性非线性关系是自然界的普遍特性。大脑的智慧就是一种非线性现象。人工神经元处于激活或抑制二种不同的状态,这种行为在数学上表现为一种非线性网络关系。具有阈值的神经元构成的网络具有更好的性能,可以提高容错性和存储容量。 (2)非局限性一个神经网络通常由多个神经元广泛连接而成。一个系统的整体行为不仅取决于单个神经元的特征,而且可能主要由单元之间的相互作用、相互连接所决定。通过单元之间的大量连接模拟大脑的非局限性。联想记忆是非局限性的典型例子。 (3)非常定性人工神经网络具有自适应、自组织、自学习能力。神经网络不但处理的信息可以有各种变化,而且在处理信息的同时,非线性动力系统本身也在不断变化。经常采用迭代过程描写动力系统的演化过程。 (4)非凸性一个系统的演化方向,在一定条件下将取决于某个特定的状态函数。例如能量函数,它的极值相应于系统比较稳定的状态。非凸性是指这种函数有多个极值,故系统具有多个较稳定的平衡态,这将导致系统演化的多样性。 (2)BP神经网络模型 BP(Back Propagation)网络是1986年由Rumelhart和McCelland为首的科学家小组提出,是一种按误差逆传播算法训练的多层前馈网络,是目前应用最广泛的神经网络模型之一。BP网络能学习和存贮大量的输入-输出模式映射关系,而无需事前揭示描述这种映射关系的数学方程。它的学习规则是使用最速下降法,通过反向传播来不断调整网络的权值和阈值,使网络的误差平方和最小。BP神经网络模型拓扑结构包括输入层(input)、隐层(hide layer)和输出层(output layer)。 (3)径向基函数网络模型 径向基函数(Radial Basis Function,RBF)神经网络由三层组成,输入层节点只传递输入信号到隐层,隐层节点由像高斯函数那样的辐射状作用函数构成,而输出层节点通常是简单的线性函数。 隐层节点中的作用函数(基函数)对输入信号将在局部产生响应,也就是说,当输入信号靠近基函数的中央范围时,隐层节点将产生较大的输出,由此看出这种网络具有局部逼近能力,所以径向基函数网络也称为局部感知场网络。
神经网络学习笔记及R实现
神经网络 一、神经网络简介 人工神经网络(ANN),简称神经网络,是一种模仿生物神经网络的结构和功能的数学模型或计算模型。神经网络由大量的人工神经元联结进行计算。大多数情况下人工神经网络能在外界信息的基础上改变内部结构,是一种自适应系统。现代神经网络是一种非线性统计性数据建模工具,常用来对输入和输出间复杂的关系进行建模,或用来探索数据的模式物理结构:人工神经元将模拟生物神经元的功能 计算模拟:人脑的神经元有局部计算和存储的功能,通过连接构成一个系统。人工神经网络中也有大量有局部处理能力的神经元,也能够将信息进行大规模并行处理存储与操作:人脑和人工神经网络都是通过神经元的连接强度来实现记忆存储功能,同时为概括、类比、推广提供有力的支持 训练:同人脑一样,人工神经网络将根据自己的结构特性,使用不同的训练、学习过程,自动从实践中获得相关知识 神经网络是一种运算模型,由大量的节点(或称“神经元”,或“单元”)和之间相互联接构成。每个节点代表一种特定的输出函数,称为激励函数。每两个节点间的连接都代表一个对于通过该连接信号的加权值,称之为权重,这相当于人工神经网络的记忆。网络的输出则依网络的连接方式,权重值和激励函数的不同而不同。而网络自身通常都是对自然界某种算法或者函数的逼近,也可能是对一种逻辑策略的表达。 二、BP神经网络算法描述 1、sigmoid函数分类 回顾我们前面提到的感知器,它使用示性函数作为分类的办法。然而示性函数作为分类器它的跳点让人觉得很难处理,幸好sigmoid函数y=1/(1+e^-x)有类似的性质,且有着光滑性这一优良性质。我们通过下图可以看见sigmoid函数的图像: 错误!
动态神经网络综述
动态神经网络综述 摘要 动态神经网络(DNN)由于具有很强的学习能力和逼近任意非线性函数的特点而被广泛应用。本文系统介绍了该网络的几种常见模型,并在此基础之上介绍它的基本学习算法、功能、应用领域、实际推广。 关键词:动态神经网络,模型,功能,算法,应用 Abstract Dynamic Neural Network (DNN) has been widely applied by means of the strong ability of learning and the characteristic of approximating any nonlinear function. The paper mainly introduces several models of common dynamic neural network, and dynamic neural network's function, basic algorithm, application and promotion. Keywords: DNN, Models , Function , Algorithm , Application
1、绪论 人工神经网络(Artificial Neural Networks,简写为ANNs)是一种应用类似于大脑神经突触联接的结构进行信息处理的数学模型。在工程与学术界也常直接简称为神经网络或类神经网络。神经网络是一种运算模型,由大量的节点(或称神经元)和之间相互联接构成。每个节点代表一种特定的输出函数,称为激励函数(activation function)。每两个节点间的连接都代表一个对于通过该连接信号的加权值,称之为权重,这相当于人工神经网络的记忆。网络的输出则依网络的连接方式,权重值和激励函数的不同而不同。而网络自身通常都是对自然界某种算法或者函数的逼近,也可能是对一种逻辑策略的表达[1]。 神经网络按是否含有延迟或反馈环节,以及与时间是否相关分为静态神经网络和动态神经网络,其中含有延迟或反馈环节,与时间直接有关的神经网络称为动态神经网络[2]。动态神经网络具有很强的学习能力和逼近任意非线性函数的特点,自20世纪80年代末以来,将动态神经网络作为一种新的方法引入复杂非线性系统建模中引起了工程控制领域许多学者的关注[3]。动态神经网络现在已经广泛地用于模式识别、语音识别、图象处理、信号处理、系统控制、AUV自适应航向和机器人控制、故障检测、变形预报、最优化决策及求解非线性代数问题等方面。 本文第二章主要介绍了动态神经网络的分类,基本模型和算法;第三章主要介绍了动态神经网络的应用;第四章简要介绍了神经网络的改进方法。 2、DNN网络的基本模型和算法 根据结构特点,可以将动态神经网络分为3类:全反馈网络结构,部分反馈网络结构以及无反馈的网络结构。 反馈网络(Recurrent Network),又称自联想记忆网络,如下图所示: 图2-1 反馈网络模型 反馈网络的目的是为了设计一个网络,储存一组平衡点,使得当给网络一组初始值时,网络通过自行运行而最终收敛到这个设计的平衡点上。 反馈网络能够表现出非线性动力学系统的动态特性。它所具有的主要特性为以下两点: 第一、网络系统具有若干个稳定状态。当网络从某一初始状态开始运动,网络系统总可以收敛到某一个稳定的平衡状态; 第二、系统稳定的平衡状态可以通过设计网络的权值而被存储到网络中。 反馈网络根据信号的时间域的性质的分类为
神经网络实现非线性系统设计范本
神经网络实现非线性系统设计
毕业设计(论文) 中文题目神经网络实现非线性系统设计英文题目 Neural Network Nonlinear System 院系: 年级专业: 姓名: 学号: 指导教师: 职称: 月日
【摘要】神经网络具有极强的非线性及自适应自学习的特性,常被用来模拟判断、拟合和控制等智能行为,成功渗透了几乎所有的工程应用领域,是一个在人工智能方向迅速发展的具有重大研究意义的前沿课题。 本文前两章主要介绍了神经网络的发展背景和研究现状,还有BP 网络的结构原理及相关功能。然后,对如何利用GUI工具和神经网络原理设计非线性系统的基本流程进行了详细的阐述。最后,经过利用Matlab软件进行编程,以及是经过对BP神经网络算法及函数的运用,研究其在函数逼近和数据拟合方面的应用,并分析了相关参数对运行结果的影响。 【关键词】BP网络,GUI,非线性系统 【ABSTRACT】Neural network has a strong nonlinear and adaptive self-organizing properties, often used to simulate the behavior of intelligent decision-making, cognitive control, and the successful penetration of almost all engineering applications, is a rapid development in the direction of artificial intelligence
一种基于FPGA的神经网络硬件实现方案详解
一种基于FPGA的神经网络硬件实现方案详解 人工神经网络在智能控制、模式识别、图像处理等领域中应用广泛。在进行神经网络的应用研究时,人们可以将神经网络模型或算法在通用的计算机上软件编程实现,但很多时间浪费在分析指令、读出写入数据等,其实现效率并不高。软件实现的缺点是并行程度较低,因此利用软件实现神经网络的方法无法满足某些对数据实时处理要求较高的场合(如工业控制等领域)。 目前实现大规模、实时性要求高的神经网络,传统的软件算法实现方法显示出其难以满足速度等要求的不足。此外,在构建神经网络时必然需要考虑硬件实现问题。由于神经网络具有并行计算的特点和功能,可以有效发掘算法本身的并行特性,提出高效的硬件电路结构,从而完成神经网络的硬件实现。 脉冲耦合神经网络(Pulse Coupled Neural Network,PCNN)是新一代的神经网络,在研究猫等哺乳动物的视觉神经元时,根据其脉冲同步发放的工作原理所提出的。目前,P CNN 理论仍在发展中,由于其独特的并行性能,在图像分割与平滑、边缘检测与细化、决策与优化等领域应用广泛。当前的研究重点在于模型的优化和软件的实现,而相关的硬件实现在国内并不多见,PCNN并行结构的特性为硬件实现提供了可能。 1 PCNN的基本原理 脉冲耦合神经网络是一种单层模式的两维神经网络,它的基本单元是脉冲耦合网络的神经元。图1为PCNN的单个神经元模型框图,它由输入部分、连接调制部分、脉冲发生器部分3部分构成。 输入部分即接收域,其接收信号来源有两部分:邻近神经元产生的信号和外部的输入激励。这两部分信号通过两个不同的路径进行传递,其中一个路径传递反馈输入信号,其包含外部输入激励,该路径即为F路径;另一个路径传递连接输入信号,其包含来自邻近神经元产生的信号,该路径即为L路径。 连接调制部分完成上述两个路径信号的耦合,经过一定的信号处理,产生神经元的内部活
如何用MATLAB的神经网络工具箱实现三层BP网络
如何用MA TLAB的神经网络工具箱实现三层BP网络? % 读入训练数据和测试数据 Input = []; Output = []; str = {'Test','Check'}; Data = textread([str{1},'.txt']); % 读训练数据 Input = Data(:,1:end-1); % 取数据表的前五列(主从成分) Output = Data(:,end); % 取数据表的最后一列(输出值) Data = textread([str{2},'.txt']); % 读测试数据 CheckIn = Data(:,1:end-1); % 取数据表的前五列(主从成分) CheckOut = Data(:,end); % 取数据表的最后一列(输出值) Input = Input'; Output = Output'; CheckIn = CheckIn'; CheckOut = CheckOut'; % 矩阵赚置 [Input,minp,maxp,Output,mint,maxt] = premnmx(Input,Output); % 标准化数据 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%% % 神经网络参数设置 %====可以修正处 Para.Goal = 0.0001; % 网络训练目标误差 Para.Epochs = 800; % 网络训练代数 Para.LearnRate = 0.1; % 网络学习速率 %==== Para.Show = 5; % 网络训练显示间隔 Para.InRange = repmat([-1 1],size(Input,1),1); % 网络的输入变量区间 Para.Neurons = [size(Input,1)*2+1 1]; % 网络后两层神经元配置
用系统动力学、神经网络和特征值来分析供应链绩效-以实例论证讲解学习
用系统动力学、神经网络和特征值来分析供应链绩效 -以实例论证 L. RABELO*y, M. HELALy, C. LERTPATTARAPONGz, R. MORAGAx and A. SARMIENTOy 佛罗里达中央大学工程与管理系统部美国奥兰多佛罗里达中央大道4000号 摘要 由于内生变量和外生变量都影响改变供应链的行为,本文提出一种的新的方法来预测生产供应链。在用此方法进行预测识别时,由于方法允许的原因,可能导致负面的行为,为此建立供应链的动态模型,利用系统动力学进行仿真。用该模型对神经网络进行训练,使在早期,企业有能力作出反应并对相关行为进行预测。根据模型稳定性和可控性原则,特征值分析用于调查任何不可预见的行为,并消除或减少这些行为带来的影响。最后以一个电子制造公司案例来演示如何应用此方法给企业带来利益。 关键字:供应链模型系统动力学神经网络特征值分析 引言 供应链管理(SCM)目标是多方面的,包括成本最小化、提高服务质量、加强合作伙伴之间的沟通,并增加供货方面的灵活性和快速响应。而一个优秀的供应链管理则依赖于销售、需求和库存水平的数据,这需要假定供给是可预见的,这个市场过去是由供应商主导的而非消费者。目前在争夺全球市场时企业之间竞争十分激烈,因此做法上推行以顾客为中心的战略、以及拉式理念在制造业的运用和注重质量认证的策略越来越被企业看中,而这些革命性的变化迫使企业提高供应链管理,以达到预期的竞争优势。 与SCM相关的一个问题就是SC行为的变化,由于受内部和外部因素的影响,SC行为是动态的和非线性的相互作用。在客户需求层面一些小的变化都可以引起SC大幅波动(牛鞭效应)和振荡反应。例如在服务行业,当货款利率突然下降会导致对货款需求的突然增加,银行可能无法满足,因此制造业和服务业必须准备应付任何不良后果。在本文中,我们引入三个SC行分析方法:一是抓住SC 的动态;二是分析识别和分类不同情况下的系统参数;三是为SC设置自我修复能力,避免不良行为和后果。 为此我们利用系统动力学(SD)模拟该模型的性能及对SC的影响,用神经
人工智能神经网络
基于神经网络的人机对抗人工智能系统(理论) -------------------------------------------------------------------------------- 基于神经网络的人机对抗人工智能系统 Harreke 摘要: 人工智能是一门科学名称。自电子计算机发明后不久,人工智能学科即宣布创立,其目的就是要模拟人类的智力活动机制来改进计算机的软件硬件构成,使他们掌握一种或多种人的智能,以便在各种领域内有效替代人的脑力劳动,特别是解决用传统软硬件方法难以解决的问题,如模式识别,复杂的控制行为或对海量的数据进行实时评估等。 所谓人工智能,就是由人工建立的硬件或软件系统的智能,是无生命系统的智能。智能是人类智力活动的能力,是一个抽象的概念。一个软件或硬件系统是否有智能,只能根据它所表现出来的行为是否和人类某些行为相类似来做判断。 人工智能在计算机上的实现,有两种不同的方式。一种是采用传统的编程技术,使系统呈现智能的效果,而不考虑所用方法是否与人或生物机体所用的方法相同。这种方法称为工程学方法,它的编程方式虽然简单,智能效果显著,可是算法和程序一旦固定下来,智能就很难再进一步提高。另一种是模拟法,它不仅要看智能效果,还要求实现方法和人类或生物机体所用的方法相同或类似。人工神经网络是模拟人类或生物大脑中神经元的活动方式,属于模拟法。 人工神经网络入门难度大,编程者需要为每一个对象设置一个智能系统来进行控制,新设置好的智能系统,虽然一开始什么都不懂,但它拥有学习的能力,可以通过学习,不断提升智能,不断适应环境、应付各种情况。通常来讲,使用人工神经网络虽然编程复杂,但编写完成后的维护工作,将比使用其他方式编程后的维护更加省力。 本文采用人工神经网络构建一个完整的人工智能系统,并将该人工神经网络理论应用于电脑领域的项目DOTA。 关键词:人机对抗,神经网络,人工智能,DOTA 目录 第一章神经网络系统概述 1.1生物学神经网络 1.2人工神经网络
人工神经网络复习资料题
《神经网络原理》 、填空题 1、从系统的观点讲,人工神经元网络是由大量神经元通过极其丰富和完善的连接而构成的自适应、非线性、动力学系统。 2、神经网络的基本特性有拓扑性、学习性和稳定收敛性。 3、神经网络按结构可分为前馈网络和反馈网络,按性能可分为 离散型和连续型,按学习方式可分为有导师和无导师。 4、神经网络研究的发展大致经过了四个阶段。 5、网络稳定性指从t=0时刻初态开始,到t时刻后v(t+ △)=▼(◎,(t>0),称网络稳定。 6、联想的形式有两种,它们分是自联想和异联想。 7、存储容量指网络稳定点的个数,提高存储容量的途径一是改—进网络的拓扑结构,二是改进学习方法。 8、非稳定吸引子有两种状态,一是有限环状态,二是混沌状态。 9、神经元分兴奋性神经元和抑制性神经元。 10、汉明距离指两个向量中对应元素不同的个数。 二、简答题 1、人工神经元网络的特点? 答:(1 )、信息分布存储和容错性。 (2 )、大规模并行协同处理。 (3)、自学习、自组织和自适应。
(4)、人工神经元网络是大量的神经元的集体行为,表现为复杂
的非线性动力学特性。 (5)人式神经元网络具有不适合高精度计算、学习算法和网络 设计没有统一标准等局限性。 2、单个神经元的动作特征有哪些? 答:单个神经元的动作特征有:(1 )、空间相加性;(2 )、时间相加性;(3)、阈值作用;(4 )、不应期;(5 )、可塑性;(6)疲劳。 3、怎样描述动力学系统? 答:对于离散时间系统,用一组一阶差分方程来描述: X(t+1)=F[X(t)]; 对于连续时间系统,用一阶微分方程来描述: dU(t)/dt=F[U(t)]。 4、F(x)与x的关系如下图,试述它们分别有几个平衡状态,是 否为稳定的平衡状态? 答:在图(1、中,有两个平衡状态a、b,其中,在a点曲线斜率|F' (X)|>1 ,为非稳定平稳状态;在b点曲线斜率|F' (X)|<1 ,为稳定平稳状态。 在图(2、中,有一个平稳状态a,且在该点曲线斜率|F' (X)|>1 ,为非稳定平稳状态。
神经网络与matlab仿真
神经网络与matlab仿真 摘要 随着技术的发展,人工神经网络在各个方面应用越来越广泛,由于matlab仿真技术对神经网络的建模起着十分重要的作用,因此,本文通过讨论神经网络中基础的一类——线性神经网络的matlab仿真,对神经网络的matlab仿真做一个基本的了解和学习。 关键词:人工神经网路matlab仿真线性神经网络 1 神经网络的发展及应用 人工神经网络(Artificial Neural Network,简称ANN)是一种高度并行的信息处理系统,它具有高度的容错性,自组织能力和自学习能力;它以神经科学的研究成果为基础,反映了人脑功能的若干基本特性,对传统的计算机结构和人工智能方法是一个有力的挑战,其目的在于探索人脑加工、储存和搜索信息的机制,进而应用于人工智能系统。 1.1 神经网络的研究历史及发展现状 神经网络的研究已有较长的历史。1943年,心理学家McCulloch和数学家Pitts合作提出形式(兴奋与抑制型)神经元的数学模型(MP模型),开创了神经科学理论研究的时代。1944年,Hebb提出了神经元连接强度的修改规则,它们至今仍在各种神经网络模型中起着重要作用。50年代末60年代初,开始了作为人工智能的网络系统的研究。1958年,F.Rosenblatt首次引进了模拟人脑感知和学习能力的感知器概念,它由阈值性神经元组成。1962年,B.Widrow提出的自适应线性元件(adaline),具有自适应学习功能,在信息处理、模式识别等方面受到重视和应用。在这期间,神经网络大都是单层线性网络。此时,人们对如何解决非线性分割问题很快有了明确的认识,但此时,计算机科学已被人工智能研究热潮所笼罩。80年代后,传统的数字计算机在模拟视听觉的人工智能方面遇到了物理上不能逾越的基线,此时,物理学家Hopfield提出了HNN模型,引入了能量函数的概念,给出了网络稳定性的判据,同时开拓了神经网络用于联想记忆和优化计算的新途径。神经网络的热潮再次掀起。此后,Feldmann和Ballard 的连接网络模型指出了传统的人工智能“计算”与生物的“计算”的不同点,给出了并行分布的计算原则;Hinton和Sejnowski提出的Boltzman机模型则急用了统计物理学的概念和方法,首次采用了多层网络的学习算法,保证整个系统趋于全局稳定点;Rumelhart和McClelland等人发展了多层网络的BP算法;Kosko提出了双向联想记忆网络;Hecht-Nielsen提出了另一种反向传播网络,可用于图像压缩和统计分析;Holland提出了分类系统类似于以规则为基础的专家系统。这些努力为神经网络的后期发展奠定了牢固的基础。 目前,神经网络在研究方向上已经形成多个流派,包括多层网络BP算法,Hopfield网络模型,自适应共振理论(ART),自组织特征映射理论等。1987年,IEEE在San Diego召开大规模的神经网络国际学术会议,国际神经网络学会也随之诞生。 迄今为止的神经网络研究。大体可分为三个大的方向:
神经网络应用实例
神经网络 在石灰窑炉的建模与控制中的应用神经网络应用广泛,尤其在系统建模与控制方面,都有很好应用。下面简要介绍神经网络在石灰窑炉的建模与控制中的应用,以便更具体地了解神经网络在实际应用中的具体问题和应用效果。 1 石灰窑炉的生产过程和数学模型 石灰窑炉是造纸厂中一个回收设备,它可以使生产过程中所用的化工原料循环使用,从而降低生产成本并减少环境污染。其工作原理和过程如图1所示,它是一个长长的金属圆柱体,其轴线和水平面稍稍倾斜,并能绕轴线旋转,所以又 CaCO(碳酸钙)泥桨由左端输入迴转窑,称为迴转窑。含有大约30%水分的 3 由于窑的坡度和旋转作用,泥桨在炉内从左向右慢慢下滑。而燃料油和空气由右端喷入燃烧,形成气流由右向左流动,以使泥桨干燥、加热并发生分解反应。迴转窑从左到右可分为干燥段、加热段、煅烧段和泠却段。最终生成的石灰由右端输出,而废气由左端排出。 图1石灰窑炉示意图 这是一个连续的生产过程,原料和燃料不断输入,而产品和废气不断输出。在生产过程中首先要保证产品质量,包括CaO的含量、粒度和多孔性等指标,因此必须使炉内有合适的温度分布,温度太低碳酸钙不能完全分解,会残留在产品中,温度过高又会造成生灰的多孔性能不好,费燃料又易损坏窑壁。但是在生产过程中原料成分、含水量、进料速度、燃油成分和炉窑转速等生产条件经常会发生变化,而且有些量和变化是无法实时量测的。在这种条件下,要做到稳定生产、高质量、低消耗和低污染,对自动控制提出了很高的要求。 以前曾有人分析窑炉内发生的物理-化学变化,并根据传热和传质过程来建立窑炉的数学模型,认为窑炉是一个分布参数的非线性动态系统,可以用二组偏
基于MATLAB 的神经网络的仿真
智能控制 基于MATLAB 的神经网络的仿真 学院: 姓名: 学号: 年级: 学科:检测技术与自动化装置 日期:
一.引言 人工神经网络以其具有信息的分布存储、并行处理以及自学习能力等优点, 已经在模式识别、 信号处理、智能控制及系统建模等领域得到越来越广泛的应用。MATLAB中的神经网络工具箱是以人工神经网络理论为基础, 利用MATLAB 语言构造出许多典型神经网络的传递函数、网络权值修正规则和网络训练方法,网络的设计者可根据自己的需要调用工具箱中有关神经网络的设计与训练的程序, 免去了繁琐的编程过程。 二.神经网络工具箱函数 最新版的MATLAB 神经网络工具箱为Version4.0.3, 它几乎涵盖了所有的神经网络的基本常用类型,对各种网络模型又提供了各种学习算法,我们可以根据自己的需要调用工具箱中的有关设计与训练函数,很方便地进行神经网络的设计和仿真。目前神经网络工具箱提供的神经网络模型主要用于: 1.数逼近和模型拟合; 2.信息处理和预测; 3.神经网络控制; 4.故障诊断。 神经网络工具箱提供了丰富的工具函数,其中有针对某一种网络的,也有通用的,下面列表中给出了一些比较重要的工具箱函数。
三.仿真实例 BP 网络是一种多层前馈神经网络,由输入层、隐层和输出层组成。BP 网络模型结构见图1。网络同层节点没有任何连接,隐层节点可以由一个或多个。网络的学习过程由正向和反向传播两部分组成。在正向传播中,输入信号从输入层节点经隐层节点逐层传向输出层节点。每一层神经元的状态只影响到下一层神经元网络,如输出层不能得到期望的输出,那么转入误差反向传播过程,将误差信号沿原来的连接通路返回,通过修改各层神经元的权值,逐次地向输入层传播去进行计算,在经正向传播过程,这两个过程反复运用,使得误差信号最小或达到人们所期望的要求时,学习过程结束。