ZL15型轮式装载机工作装置设计(有全套图纸)
毕业设计论文ZL15型轮式装载机工作装置设计
前言
装载机主要用来装卸成堆散料,也能进行轻度的铲掘工作。由于它适用于建筑、矿山、铁道、公路、水电等国民经济各个部门,因此,在国内外产量与品种的发展都较快,是工程机械中的一个主要机种。
装载机根据不同的使用要求,发展形成了不同的结构类型。通常,按使用场合的不同,分成露天用装载机和井下用装载机;接行走系统结构不同,分成轮式装载机与履带式装载机;按卸料装载机的设计。
装载机的设计,大致要经历:明确任务、调查研究、制订设计任务书,进行整车布置、确定整机的主要性能参数,进行各部件的方案设计与强度计算,技术设计和工艺设计,试验鉴定和修改定型等这样一些阶段。一台装载机的设计是否成功,首先是从能否满足使用要求,好造、好用、好修,具备较高的作业生产串和较低的使用成本来衡量的。这体现在设计工作中,就是应当使装载机具有较完善的技术经济性能与指标以及先进的部件结构方案。
摘要
我所设计的ZL15装载机既保留了传统装载机的优点,而有具有新的性能和优点。
本次设计主要进行的工作装置的设计。装载机采掘和卸载货物的作业是通过工作装置的运动实现的。装载机的工作装置由铲斗,动臂、摇臂、连杆及液压系统等组成。铲斗以铲装物料;动臂和动臂油缸的作用是提升铲斗并使之与车架连接;转斗油缸通过摇臂,连杆使铲斗转动。动臂的升降和铲斗的转动采用液压操作。
先对装载机的发展概况几计的指导思想、特点、任务进行概述,然后确定方案,在技术设计部分罗列了ZL15装载机的主要技术性能和参数,进行了牵引特性计算,工作装置设计。工作装置设计中有工作装置运动分析,对铲斗、动臂、连杆机构进行设计等几部分组成。
在工艺设计中叙述了工艺工程。应用程序计算了受力分析。总之,整个设计是有序地完成的。
在整个设计的过程中,在老师及其他老师的指导下顺利完成的,通过这次设计,我学到很多东西,在实践中把大学中所学的知识综合运用复习了一次,同时也学到很多新的东西,受益非浅。在此,本人表示衷心感谢!并真诚希望各位老师对我提出宝贵的意见。
Abstract
This type of ZL15 loader that I have designed has the common virtues of the traditional loaders.And it has some new-improved virtues and function.
In my design progress,I put emphasis on the working-device.
The ZL15 loader also has some traditional virtues like the articulited wh
目录
第一章设计任务书 (1)
第二章装载机的发展及应用
2.1 装载机在的介绍 (1)
2.2 装载机在地下开采中的应用 (2)
2.3 我国装载机的发展前景 (3)
第三章轮式装载机总体参数的确定 (4)
第四章装载机的总体布置
4.1 装载机的总体布置原则 (6)
4.2 装载机各部件的布置 (7)
4.3 装载机的总体构造和分类 (9)
第五章装载机工作装置的设计
5.1 工作装置结构分析 (10)
5.2 铲斗设计 (11)
5.3 工作机构连杆系统的尺寸参数设计 (15)
5.4 工作装置强度计算 (21)
5.5 装载机工作装置中油缸作用力的确定 (29)
5.6 工作装置的限位机构 (30)
总结 (31)
参考文献 (32)
第一章设计任务及要求
一.课题名称(包括主要技术参数)及要求
ZL15型装载机工作装置设计
m
装载机工作装置斗容:0.93
额定载重量:
柴油机功率:
整机重量:5.1t
最大卸载高度:2
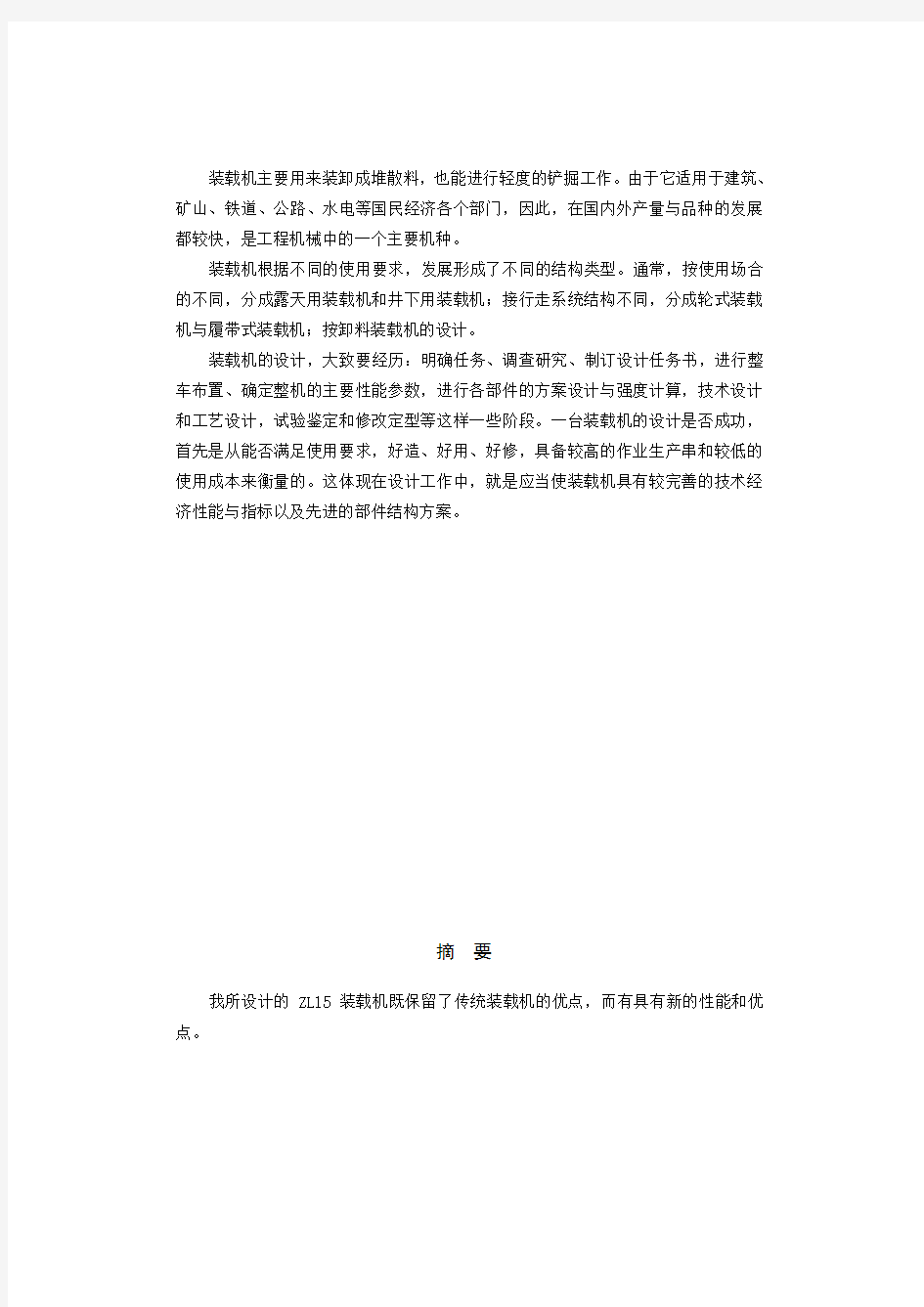
最小动臂或横梁上相应的挡块相碰铲斗即停止上翻。由于转斗油缸控制阀尚未回到中立位置,故油泵继续向转斗油缸供油,造成液压系统的压力超过过载阀调出压力,过载阀打开,避免机构损坏。铲斗前倾角的限位原理与上述一样,在最大卸载高度的铲斗前倾角达到45 时,铲斗上的挡块B与动臂或横梁上相对应的挡块相碰,铲斗即停止前倾。
铲斗转角限位装置简图
总结
经过这三个月的集中努力,毕业设计已经接近尾声,至此我已经完成了所有的设计任务。在我做设计期间,主要经历了实习,可行性分析,计算和绘图等几个阶段。
由于设计的内容是第一次接触,所以开始着手时候不是很顺利,整个设计过程中有很多反复计算,如设计装载机工作装置的工作部分确定各个铰接点位置的过程中走了一些弯路。到目前为止对设计不是非常满意,我所学知识有限没能弄懂某些知识点,在设计过程中,很多新的东西都是边翻资料边作设计,对有些知识掌握的不透,还需要在以后的工作学习过程中多实践学习。同时在设计过程中有粗心大意的时候,造成了一些影响,望老师谅解。
设计过程中,我得到老师的细心指导,使我所遇到的困难得到了即时的解决。另外,也感谢老师的督促指导,在此向所有的指导老师表示感谢!
主要参考文献
1. 《机械设计课程设计》寇尊权主编吉林科学技术出版社2.《机械设计》杨明忠主编
3.《轮式装载机设计》吉林工业大学工程机械教研室编中国建筑工业出版社 1982年12月第一版
4.《矿山装载机设计》东北工学院李建成主编机械工业出版社 1989年5月第一版
5.《机械工程图学》吉林大学侯洪生主编科学出版社 2001年9月第一版
6.《露头装载机》冶金工业部长沙矿山研究所主编
7.《地下装载机结构设计与使用》高梦熊主编北京冶金工业出版社8.《装载机工作装置优化设计》王国彪,杨力夫主编机械工业出版社
9.《装载机械高湖海主编工程机械构造图册》刘烯平主编
10.《装载机械》高湖海主编
11.《中文版 Auto CAD 2004机械制作轻松入门》王建平,长会珍编科学出版社
12.《机械原理》机械原理谢进, 万朝燕, 杜立杰主编
13.《机械设计手册》机械设计手册编委会主编
14.《C程序设计第二版》谭浩强编清华大学出版社
附件:
动臂、铲斗运动仿真:
#include "stdio.h"
#include "math.h"
#include "graphics.h"
#define pi 3.1415926
main()
{
float l1 , l2 , l3 , l4 , a , b;
int x1 , y1 , x2 , y2 , x3 , y3 , x4 , y4;
int gdriver=DETECT,gmode;
initgraph (&gdriver ,&gmode , "c:\\mydocuments\\tc"); cleardevice();
line(20,460,400,460);
line(20,460,20,20);
circle(20,230,3);
circle(20,320,3);
l1=sqrt(pow(119,2)+pow(130,2));
l2=sqrt(pow(210,2)+pow(230,2));
x2=(int)(12*sin(135*(pi/180)));
y2=(int)(230-12*cos(135*(pi/180)));
l3=sqrt(pow((250-x2),2)+pow((460-y2),2));
l4=sqrt(pow((240-x2),2)+pow((y2-430),2));
x1=(int)(l1*sin(135*(pi/180)));
y1=(int)(230-l1*cos(135*(pi/180)));
circle(250,460,3);
circle(240,460,3);
line(x2,y2,250,460);
line(x2,y2,240,430);
line(240,430,250,460);
b=60*(pi/180);
for(a=70*(pi/180);a<145*(pi/180);a+=pi/180)
{cleardevice(); line (20,460,400,460); line(20,460,20,20); circle(20,230,3); circle(20,320,3);
line(20,230,x1,y1); line(x1,y1,x2,y2); circle(x2,y2,3);
line(20,320,x1,y1); circle(x1,y1,3);
x3=x2+l3*sin(a);
y3=y2+l3*cos(a);
x4=x2+l4*sin(a+b); y4=y2+l4*cos(a+b); circle(x3,y3,3); circle(x4,y4,3);
line(x2,y2,x3,y3); line(x2,y2,x4,y4); line(x3,y3,x4,y4); getch();
}
for (a=135*(pi/180);
a>50*(pi/180);
a-=pi/120)
{
line (20,460,400,460);
line (20,460,20,20);
circle(20,230,3);
circle(20,320,3);
x1=(int)(l1*sin(a));
y1=(int)(230-l1*cos(a));
circle(x1,y1,3);
line(20,320,x1,y1);
line(20,230,x1,y1);
x2=(int)(12*sin(a));
y2=(int)(230-12*cos(a)); circle(x2,y2,3);
line(x1,y1,x2,y2);
getch();
}
getch();
}