红外定位的系统和方法与相关技术
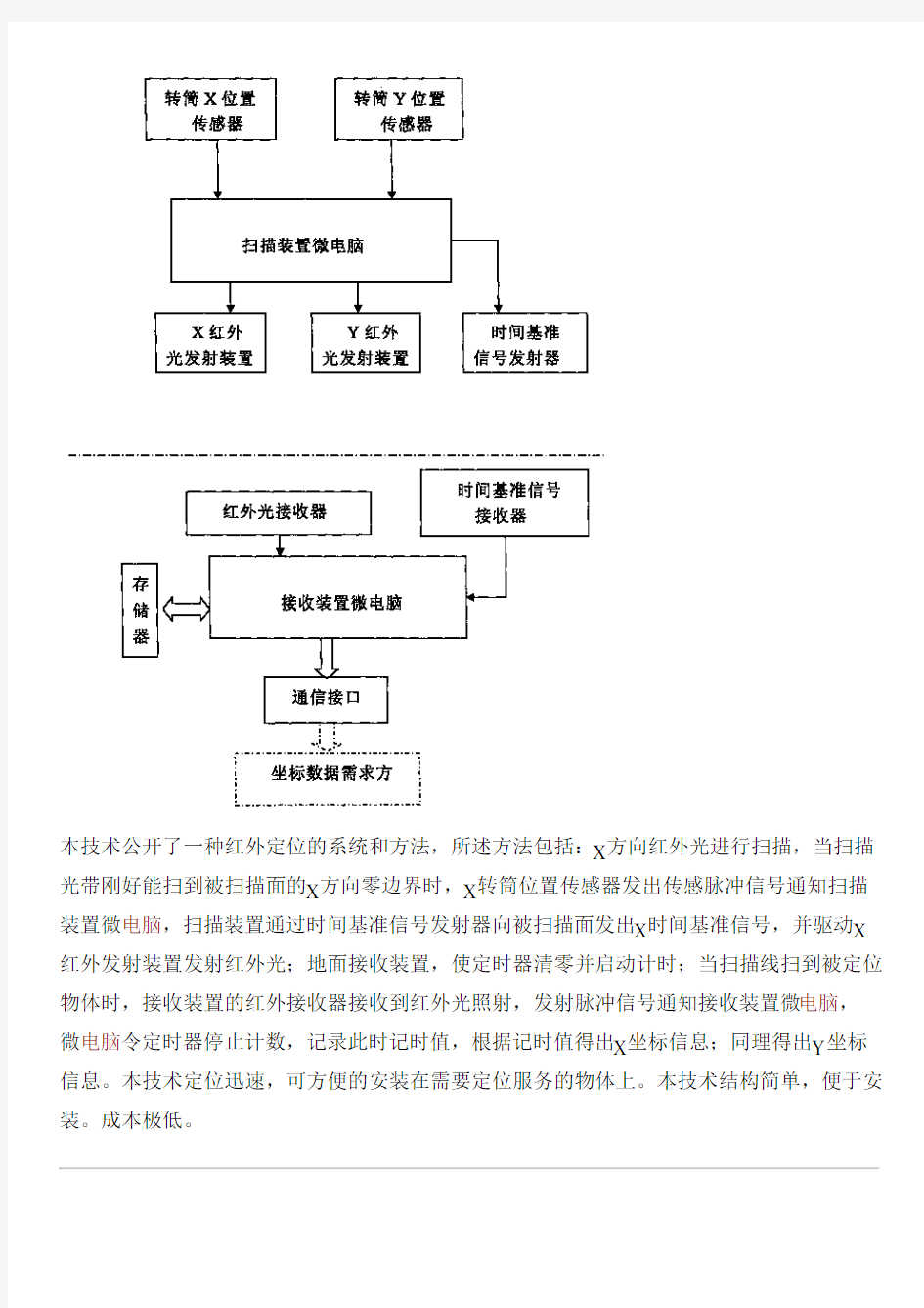

本技术公开了一种红外定位的系统和方法,所述方法包括:X方向红外光进行扫描,当扫描光带刚好能扫到被扫描面的X方向零边界时,X转筒位置传感器发出传感脉冲信号通知扫描装置微电脑,扫描装置通过时间基准信号发射器向被扫描面发出X时间基准信号,并驱动X 红外发射装置发射红外光;地面接收装置,使定时器清零并启动计时;当扫描线扫到被定位物体时,接收装置的红外接收器接收到红外光照射,发射脉冲信号通知接收装置微电脑,微电脑令定时器停止计数,记录此时记时值,根据记时值得出X坐标信息;同理得出Y坐标信息。本技术定位迅速,可方便的安装在需要定位服务的物体上。本技术结构简单,便于安
装。成本极低。
技术要求
1、一种红外定位系统,包括扫描装置和接收装置;其特征在于,所述扫描装置中,包括:
扫描装置微电脑、X方向红外光发射装置、X转筒位置传感器、Y方向
红外光发射装置;Y转筒位置传感器;时间基准信号发射器;
所述扫描装置微电脑,用于接收转筒位置传感信号,控制时间基准信号发射器和红外光发射装置;
所述X方向红外光发射装置,用于产生红外光,对被定位平面的X方向
扫描;
所述X转筒位置传感器,使红外扫描光带在刚好能扫到被扫描面X边界时,产生一个X脉冲信号;
所述Y方向红外光发射装置,用于产生红外光,对被定位平面的Y方向
扫描;
所述Y转筒位置传感器,使红外扫描光带在刚好能扫到被扫描面Y边界时,产生一个Y脉冲信号;
所述时间基准信号发射器,用于产生时间基准信号,向被扫描面发射X、Y时间基准信号;
所述接收装置包括:接收装置微电脑;时间基准信号接收器;红外光接收器;存储器;
所述时间基准信号接收器,用于接收扫描装置发出的X、Y时间基准信号,并通知接收装置微电脑;
所述红外光接收器,用于接收扫描装置发出的红外扫描信号;
所述接收装置微电脑,具有定时器功能,用于计算时间基准信号与红外
扫描信号的时间差,得出位置坐标。
2、根据权利要求1所述的红外定位系统,其特征在于,所述接收装置还
包括一个通信接口,负责所述接收装置微电脑与坐标数据需求方之间的数据传输。
3、根据权利要求1或2所述的红外定位系统,其特征在于,所述接收装
置包括的所述存储器,存储扫描时间与位置对应关系的换算表,供接收装置微电脑查询。
4、根据权利要求3所述的红外定位系统,其特征在于,所述扫描装置中,所述X或Y方向红外光发射装置,分别安装在两个转筒中,通过驱动使其周期运动;所述转筒上刻有狭缝,红外光透过狭缝射出,照射到被定位区域上成一束光带。
5、根据权利要求4所述的红外定位系统,其特征在于,所述的两个转筒
的安装位置为相互垂直。
6、根据权利要求5所述的红外定位系统,其特征在于,所述的X或Y转
筒位置传感器,安装在相应的转筒的一侧。
7、一种红外定位的方法,其特征在于,包括如下步骤:
首先,X方向红外光进行扫描,当扫描光带刚好能扫到被扫描面的X方
向零边界时,X转筒位置传感器发出传感脉冲信号通知扫描装置微电脑,
扫描装置通过时间基准信号发射器向被扫描面发出X时间基准信号,并驱
动X红外发射装置发射红外光;地面接收装置,使定时器清零并启动计时;
当扫描线扫到被定位物体时,接收装置的红外接收器接收到红外光照
射,发射脉冲信号通知接收装置微电脑,微电脑令定时器停止计数,记录此时记时值,根据记时值得出X坐标信息;
接着,按如上过程进行Y方向红外光扫描,得出Y坐标信息。
8、根据权利要求7所述的红外定位方法,其特征在于,所述根据记时值
得出X或Y的坐标信息,可以通过接收装置微电脑进行实时运算得出,也可
以通过预先计算的换算表查询。
说明书
一种红外定位的系统和方法
技术领域
本技术涉及位置定位技术领域,特别是涉及一种红外定位系统与方法,本技术适用于向地面可移动装置、墙面爬行装置等位于一特定矩形平面区域内的物体提供位置、速度信息。
背景技术
随着国民经济的迅速发展,对各种物体的定位服务也随之增加,借助于定位技术,可以准确地获知被定位物体的位置信息,并提供相关的导航服务。现有技术中,主要有以下几种定位方案:
在地面上绘制标志线
被定位装置主要通过光电检测地面反射信号的强度探测标志线,进行粗略定位。地上绘制标志线只能对定位起到极为有限的辅助作用,比如,接通管理系统中,对闯红灯的车辆碱性定位监测,但是车辆不能通过它来确定自己的确切位置。
利用电子眼和超声传感器等装置获得方位信息
通过强大的数字信号处理单元实时对数据进行处理,判别周围物体的方位,从而得到自身的相对位置。这是对人类和其他动物通过眼睛定位的一种仿真,也许是机器人定位技术发展的最终方式,如果这种技术成熟,将会得到非常广泛的应用,但目前这种技术尚未成熟,不论是硬件还是软件都很复杂,效果也不是很好,尚不可能被推广。
被定位区域上空固定摄像机
采集到的信息传到计算机后通过相应软件进行物体识别、坐标计算,确定被定位目标的坐标,并通过无线通信的方式把坐标传给地面目标或直接对目标进行控制。这种定位方式和方案二类似,但在原理上(主要是软件上) 比方案二简单,但只能在某些特殊场合值得应用,这种方案硬件上花费很大且只能对几个预知形状和颜色的物体定位。
在某些特殊的场合,比如在某个特定的小范围内,上述定位技术还不能较好地适用,目前,尚未检索到适用较小范围内定位的相应的技术文献。
技术内容
本技术要解决的技术问题是提出一种适合小范围的红外定位系统与方法,本技术定位迅速、精确可靠、结构简单、安装方便、成本低廉。
本技术所述红外定位系统,包括扫描装置和接收装置;
所述扫描装置中,包括:
扫描装置微电脑、X方向红外光发射装置、X转筒位置传感器、Y方向红外光发射装置;Y转筒位置传感器;时间基准信号发射器;
所述扫描装置微电脑,用于接收转筒位置传感信号,控制时间基准信号发射器和红外光发射装置;
所述X方向红外光发射装置,用于产生红外光,对被定位平面的X方向扫描;
所述X转筒位置传感器,使红外扫描光带在刚好能扫到被扫描面X边界时,产生一个X脉冲信号;
所述Y方向红外光发射装置,用于产生红外光,对被定位平面的Y方向扫描;
所述Y转筒位置传感器,使红外扫描光带在刚好能扫到被扫描面Y边界时,产生一个Y脉冲信号;
所述时间基准信号发射器,用于产生时间基准信号,向被扫描面发射X、 Y时间基准信号;
所述接收装置包括:接收装置微电脑;时间基准信号接收器;红外光接收器;存储器;
所述时间基准信号接收器,用于接收扫描装置发出的X、Y时间基准信号,并通知接收装置微电脑;
所述红外光接收器,用于接收扫描装置发出的红外扫描信号;
所述接收装置微电脑,具有定时器功能,用于计算时间基准信号与红外扫描信号的时间差,得出位置坐标。
如上所述的系统,所述接收装置还包括一个通信接口,负责所述接收装置微电脑与坐标数据需求方之间的数据传输。
如上所述的系统,所述接收装置包括所所述的存储器,存储扫描时间与位置对应关系的换算表,供接收装置微电脑查询。
如上所述的系统,所述扫描装置中,所述X或Y方向红外光发射装置,分别安装在两个转筒中,通过驱动使其周期运动;所述转筒上刻有狭缝,红外光透过狭缝射出,照射到被定位区域上成一束光带。
如上所述的系统,所述的两个转筒的安装位置为相互垂直。
如上所述的系统,所述的X或Y转筒位置传感器,安装在相应的转筒的一侧。
本技术所述红外定位的方法,包括如下步骤:
X方向红外光进行扫描,当扫描光带刚好能扫到被扫描面的X方向零边界时,X转筒位置传感器发出传感脉冲信号通知扫描装置微电脑,扫描装置通过时间基准信号发射器向被扫描面发出X时间基准信号,并驱动X红外发射装置发射红外光;地面接收装置,使定时器清零并启动计时;
当扫描线扫到被定位物体时,接收装置的红外接收器接收到红外光照射,发射脉冲信号通知接收装置微电脑,微电脑令定时器停止计数,记录此时记时值,根据记时值得出X 坐标信息;
接着,按如上过程进行Y方向红外光扫描,得出Y坐标信息。
如上所述的方法,所述根据记时值得出X或Y的坐标信息,可以通过接收装置微电脑进行实时运算得出,也可以通过预先计算的换算表查询。
本技术与传统的定位方案相比,有如下优点:
定位迅速,每秒能连续提供多次以上的坐标信息。被定位物体不限数量和外形,只要处在被定位面内,均能各自安装接收器定位。精度高。体积小,扫描装置的体积可以控制在20cm*20cm*10cm以内,接收装置的体积在 4cm*3cm*3cm以内,可方便的安装在需要定位服务的物体上。本技术结构简单,便于安装。成本极低。
附图说明
图1为本技术系统结构示意图;
图2是扫描装置结构示意图;
图3是本技术所述定位方法的扫描过程的示意图;
图4位置传感器和接收装置计时配合的示意图;
图5是红外光扫描到接收装置的红外传感器上的示意图;
图6为红外光对Y方向扫描过程的示意图。
具体实施方式
本技术所述系统分为扫描装置和接收装置两部分。扫描装置利用两束红外光分别在互相垂直的方向上匀速转动扫描一矩形平面区域,分别在当红外光扫到地面两互相垂直的边界上时发送两种不同时间基准信号(为叙述方便,以下称这两个互相垂直的方向为X,Y 方向,系统中相应的两套同类部件均以X,Y相区别)。地面上的接收装置通过计算从收到时间基准信号至红外光到达之间的时间差并将其转换成接收装置分别离两边界的距离(即横纵坐标)。
本技术所述系统的结构示意图如图1所示,扫描装置的结构示意图如图 2所示,各部件功能如下:
支架:用于安装和固定扫描机构和其他部件。
X、Y方向的转筒:每个转筒里面安装有红外光发射器,转筒上刻有狭缝。红外光透过狭缝射出,照射到地面上成一条光带。光带与被扫描平面平行,用于扫描被定位平面。转筒由机械运动部件带动作圆周运动(也可选择往复运动等周期性运动方式)。转筒上的狭缝随着转筒运动,红外光透过它照射到被定位平面的光带在平面上扫描。
时间基准信号发射器、接收器:用于时间基准信号的传输,可使用红外或无线等传输手段。
转筒位置传感器:调整转筒位置传感器的安装位置,使红外扫描光带在刚好能扫到被扫描面边界时,产生一个传感脉冲信号(注意“刚好能”三个字的意思是指如果此时转筒里发出红外光,那么红外光带将处在被扫描面边界上,实际上红外光是在扫描装置接收到X 转筒位置传感器传来的脉冲信号后才开始发射的,本文以后出现的“刚好能”三个字均应作此理解)。
如图3所示,透过X转筒射出的X红外扫描光带刚好能扫描到被扫描矩形区域内X方向上的边界AB时,安装在X转筒旁的X转筒位置传感器产生一个X传感脉冲信号,扫描装置上的微电脑接收到这个传感信号后,通过时间基准信号发射器向被扫描面发送X时间基准信号。处于被扫描平面内的接收装置通过时间基准信号接收器接收到X时间基准信号后,发出脉冲信号给接收装置微电脑,微电脑对记时器清零并开始记时。同理,Y转筒位置传感器在透过Y转筒的Y红外扫描光带刚好能扫描到被扫描面的Y方向上的AC 边界时,发出传感脉冲信号通知扫描装置微电脑,微电脑通过时间基准信号发射器向被扫描面发送Y时间基准信号。处于被扫描平面内的接收装置通过时间基准信号接收器接收到Y时间基准信号后,发出脉冲信号给接收装置微电脑,微电脑也对记时器清零并开始记时。值得注意的是,由于本技术所述系统X,Y方向上的扫描是轮流而不是同时的,所以微电
脑可以只使用一个定时器,这一点将在对本技术所述系统工作过程的阐述中进一步解释。
红外光发射装置:扫描装置在收到X转筒位置传感器传感脉冲信号后,在向被扫描面发射X时间基准信号的同时,驱动X红外发射装置持续发射一段时间,这段时间的长度略大于X红外光带沿X方向从被扫描面AB边界扫到CD边界的时间。同理,扫描装置在收到Y 转筒位置传感信号时,驱动Y 红外发射装置持续发射红外光一段时间。这段时间的长度也略大于Y红外光带沿Y方向从被扫描面AC边界到BD边界的时间。
红外光接收器:红外光扫描到接收装置时,接收装置上的红外接收器发出脉冲信号通知传给接收装置微电脑,微电脑停止定时器并记录此时计时值。
存储器:根据转筒的运动规律可推算出红外光带在被扫描面上的运动规律,从而可以得到地面接收装置定时器的计时值和坐标的对应关系。这个对应关系可通过计算机制成对应表存放在接收装置的存储器里。微电脑凭计时值查表可立即得出坐标值。当然接收装置也可根据扫描光带的运动规律实时计算出坐标而不需要存储器,不过这会增加微电
脑的运算负担。
通信接口:根据不同的需要,通信接口负责把坐标数据传输给坐标数据需求方。如果是对可移动机器人定位,则通信接口负责把数据传给机器人的微电脑或其指挥机构。如果是对农场中的牲畜、区域内的障碍物等非电子装置,通信接口负责将数据发送给中央管理系统,用以对牲畜、障碍物进行监测。
本技术所述方法的原理如下:
如附图4所示,当X红外扫描光带刚好能扫到被扫描面的X方向零边界时,(即面ABCD的AB线)时,X转筒位置传感器发出传感脉冲信号通知扫描装置微电脑,扫描装置通过时间基准信号发射器向被扫描面发出X时间基准信号,并驱动X红外发射装置发射红外光。地面接收装置接收到这个X 时间基准信号后让定时器清零并启动计时。
当X扫描线扫到如图5位置时,接收装置的红外接收器接收到红外光照射,发射脉冲信号通知接收装置微电脑,微电脑令定时器停止计数,记录此时记时值,并根据这个时间值查表得出X坐标。
X红外扫描光带沿X方向扫过边界CD,移出被定位面。扫描装置停止X 红外光的发射。根据扫描装置转筒的运动规律,可推算出X红外扫描光带沿 X方向从边界AB扫到边界CD所需的时间T1,扫描装置只需使X红外发射装置的发光时间略大于时间T1即可。
接下来扫描装置等待Y位置传感器的脉冲信号,当Y红外扫描光带刚好能扫到被扫描面的Y方向零边界时,(即面ABCD的AC线)时,Y转筒位置传感器发出传感脉冲信号。扫描装置通过时间基准信号发射器向被扫描面发出Y时间基准信号,并驱动Y红外发射装置持续发射红外光直到Y红外扫描光带沿Y方向从边界AC扫到边界BD。地面接收装置接收到这个Y时间基准信号后让定时器清零并启动计时。
当Y扫描线扫到如图6位置时,接收装置的红外接收器接收到红外光照射,发射脉冲信号通知接收装置微电脑,微电脑令定时器停止计数,记录此时记时值,并根据这个时间值查表就可得出Y坐标。
Y红外扫描光带沿X方向扫过边界BD,移出被定位面。扫描装置停止Y 红外光的发射。根据扫描装置转筒的运动规律,可推算出Y红外扫描光带沿 X方向从边界AC扫到边界BD所需的时间T2,扫描装置只需使Y红外发射装置的发光时间略大于时间T2即可。
通过如上步骤,接收装置就获得了一次X、Y坐标信息。按照以上规律,扫描装置不停的扫描,接收装置便能不停的获得当前的坐标信息。
上述根据记时值得出X或Y的坐标信息,可以通过接收装置微电脑进行实时运算得出,也可以通过预先计算的换算表查询。
下面列举本技术的两个具体例子:
扫描装置装在需要定位面的上方
地面上需定位物体或可移动装置安装本技术所述系统的接收装置。接收装置便可实时向坐标信息接收方提供坐标信息,从而可以进行各种智能控制。如控制机器人的行走,机器人头上安装定位接收装置,则本技术所述系统可替代传统的定位系统,给机器人提供更迅速,更精确,更直接的位置信息。本技术所述系统也可应用于非电子装置,如牲畜,障碍物等。接收装置可将牲畜,障碍物的位置发送给中央管理系统或其他需要这些位置信息的地方做进一步的应用。
在会议室、多媒体教室等需要用大屏幕投影的场合
扫描装置可对投影幕扫描。接收装置安装在教鞭顶端,即可提供教鞭顶端相对于投影幕的位置。计算机上安装相应的驱动程序。计算机通过和接收装置通讯,可实时控制鼠标移动到教鞭所指的位置。教鞭上可安装两个按键,代替鼠标左右键,则可完全代替鼠标操作计算机,完成类似触摸屏的功能,有相当的实用价值。
最后所应说明的是:以上实施例仅用以说明而非限制本技术的技术方案,尽管参照上述实施例对本技术进行了详细说明,本领域的普通技术人员应当理解:依然可以对本技术进行修改或者等同替换,而不脱离本技术的精神和范围的任何修改或局部替换,其均应涵盖在本技术的权利要求范围当中。
红外线定位仪
红外线定位仪 可广泛用于各种板材切割成型机、石材机械、木工机械、金属锯床、包装机械的对刀、放线。能产生一条清晰明请打零贰玖捌捌柒贰陆柒柒叁亮的红线、体积小巧、方便调节、易于安装、稳定可靠。能较大幅度的提高工作效率。我们还可以提供电源内置一体式激光辅助定位灯,使客户的使用更加方便。 The equipment is wide applies to various boards cutting machine, stone material machine, woodcutting machine, metal sawing machine, packaging machine collimated. It can emit a clear red light, and has small body with easy adjusted and set up and also safe stability. It can improve working efficiency highly. We can offer a unity series laser marking-off equipment with power supply inside for using easier. 输出波长:635nm 650nm 输出功率:635nm 10~30mw 650nm 20~150mw 工作电压:5V DC 工作电流:≤450mA 光束发散度:0.1~1.5mrad 出光张角:10o~135o 光线直径:≤0.5mm @0.5m;≤1.0mm @3.0m;≤1.5mm @6.0m; 直线度:≤1.0mm @6.0m 光学透镜:光学镀膜玻璃或塑胶透镜 尺寸:Φ16×55mm;Φ16×65mm;Φ16×80mm;Φ22×85mm;Φ26×110mm(可定制) 尺寸:Φ45×210mm;Φ60×210mm(电源内置一体式) 工作温度:-10~75℃ 储存温度:-40~85℃ 使用寿命:连续使用大于8000小时 附件:专用电源工业支架 激光等级:Ⅲb Output wavelength: 635nm 650nm Output power: 635nm 10~30mw 650nm 20~150mw Operating voltage: 5V DC Operating current: ≤450mA Beam divergence: 0.1~1.5mrad Fan angle: 10o~135o Beam diameter: ≤0.5mm @0.5m;≤1.0mm @3.0m;≤1.5mm @6.0m; L ine degree:≤1.0mm @6.0m Optics: coated glass lens or plastic lens Size: Φ16×55mm;Φ16×65mm;Φ16×80mm;Φ22×85mm;Φ26×110mm(made as requirement; Φ45×210mm;Φ60×210mm(power supply inside series) Operating temperature: -10℃~75℃
基于单摄像头的运动目标跟踪定位技术研究
工程技术 Computer CD Software and Applications 2012年第18期 — 82 — 基于单摄像头的运动目标跟踪定位技术研究 谢鹏程 (北京信息科技大学仪器学院,北京 100101) 摘要:单目视觉跟踪定位、双目视觉跟踪定位和多目视觉传感器跟踪定位是当前的计算机主要的视觉定位跟踪方式,但是由于利用双目视觉跟踪定位和多目视觉传感器中存在着视场小、系统结构庞大、立体匹配难等缺陷,在很多工业制造场合已逐渐被标定步骤少、结构简单的单目视觉所代替。本实验通过单目视觉方式实现了对运动目标跟踪定位,并设计了基于单摄像头的运动目标跟踪定位系统,采用CamShift 算法通过目标颜色信息选取对目标进行识别、提取以及检测,通过基于邻域线性搜索与卡尔曼滤波器相结合的跟踪算法,准确实现运动目标的识别和定位,并进行了一系列相应的理论实验验证与分析,给出了最终的实验结果。 关键词:单目视觉;CamShift 算法;颜色空间;目标定位 中图分类号:TP391 文献标识码:A 文章编号:1007-9599 (2012) 18-0082-03 1 引言 计算机视觉是计算机科学和人工智能的一个重要分 支,它既是工程领域,也是科学领域中的一个富有挑战性 的重要研究领域,已经吸引了来自各个学科的研究者参加 到对它的研究之中。计算机视觉的挑战是要为计算机和机器人开发具有与人类水平相当的视觉能力。机器视觉需要图像信号,纹理和颜色建模,几何处理和推理,以及物体建模。一个有能力的视觉系统应该把所有这些处理都紧密地集成在一起[1] 。本文中通过单目视觉检测方法实现了对运动目标跟踪定位,并设计了基于卡尔曼滤波器与邻域线性搜索相结合的跟踪算法,大大地减少了传统的目标跟踪算法对目标运动位置预测搜索的迭代时间,并解决了在相邻两帧图像中由于目标位置发生剧烈变化而导致目标丢失的问题,该系统简单便携,在工业自动化方面具有较高的应用价值。 2 构建单目视觉的运动目标跟踪定位系统 本系统共分为目标提取识别和目标 跟踪定位两大模块,目标提取识别模块由边缘提取,特征提取,图像分割等方法实现。其实质是用数字图像处理的方法实现对目标的识别,数字图像处理一般包括图像的获取、增强、存储、处理、表达和识别等步骤[2]。目标跟踪定位模块由CamShift 算法,邻域线性搜索法组成。本文的图像处理流程为: 图1 图像处理流程图 在目标识别前,首先要进行目标采集,本文所用设备为USB 摄像头,所采集图片的颜色空间为RGB 空间,然后把RGB 空间转换成HSV 颜色空间,然后选取目标的颜色模板,通过特征匹配和邻域线性搜索等检测跟踪算法,最终实现对目标的识别与跟踪。 2.1 采用HSV 颜色空间对图像进行处理 首先,本文的识别系统主要是通过对目标颜色信息的提取进行定位,色彩信息在HSV 空间有显著差异 ,HSV 坐标可以用图2表示,由图可以看出色度H 差异明显,此外白色与黑色分别位于锥顶和锥底中心,与彩色的V 值和饱和度差异明显。设定门限较为容易,而采用RGB 空间,在目标识别时可造成某些颜色分量的重叠,这些重叠目前无规律可循,因此不利于进行目标的识别和定位。 图2 圆锥表示的HSV 颜色模型 其次,采用HSV 颜色空间可抵抗光照强度的变化,HSV 颜色模型的坐标系统如图2所示,H 表示色彩信息,即所处的光谱颜色的位置,该参数用一角度量来表示,红、绿、蓝分别相隔120°,互补色分别相差180°。饱和度S 为一比例值,范围为0-1,它表示所选颜色的纯度和该颜色最大纯度之间的比率。V 表示色彩的明亮程度,范围为0-1[3]。由转换关系: max=max(R ,G ,B) min=min(R ,G ,B) if R=max ,H=(G-B)/(max-min) if G=max ,H=2+(B-R)/(max-min) if B=max ,H=4+(R-G)/(max-min) H=H*60
室内定位技术汇总教学内容
室内定位技术调研 随着数据业务和多媒体业务的快速增加,人们对定位与导航的需求日益增大,尤其在复杂的室内环境,如机场大厅、展厅、仓库、超市、图书馆、地下停车场、矿井等环境中,常常需要确定移动终端或其持有者、设施与物品在室内的位置信息。但是受定位时间、定位精度以及复杂室内环境等条件的限制,GPS和北斗导航定位系统在室内都很难定位,原因是定位系统星座发射的微波信号过于微弱,并且频率很高,即要沿着直线传播,且难以穿过墙壁,所以在室内就收不到信号了。只有在室外,天空中没有什么阻挡时可以接受。 图1 室内定位的方式 因此,专家学者提出了许多室内定位技术解决方案,如A-GPS定位技术、超声波定位技术、蓝牙技术、红外线技术、射频识别技术、超宽带技术、无线局域网络、光跟踪定位技术,以及图像分析、信标定位、计算机视觉定位技术等等。这些室内定位技术从总体上可归纳为几类,即GNSS技术(如伪卫星等),无线定位技术(无线通信信号、射频无线标签、超声波、光跟踪、无线传感器定位技
术等),其它定位技术(计算机视觉、航位推算等),以及GNSS和无线定位组合的定位技术(A-GPS或A-GNSS)。除了以上提及的定位技术,还有基于计算机视觉、光跟踪定位、基于图像分析、磁场以及信标定位等。此外,还有基于图像分析的定位技术、信标定位、三角定位等。目前很多技术还处于研究试验阶段,如基于磁场压力感应进行定位的技术。如图1所示,能够满足米级定位精度的定位技术,从规模上推广角度来看由易到难,依次为 Wi-Fi、LED、RFID、ZiBee、超声波、蓝牙、计算机视觉、激光、超宽带等。实现室内定位技术上可以采取以下一种或多种混合:北斗定位、基站定位、wifi定位、IP定位、RFID/二维码等标签识别定位、蓝牙定位、声波定位、场景识别定位. Wi-Fi定位 Wi-Fi定位相比于北斗、GPS、基站定位方式的优势在于室内定位精度高。由于Wi-Fi热点廉价、布设容易,很容易通过增加Wi-Fi热点来提高室内定位精度。若用于LBS,Wi-Fi定位可作为一定室内区域(如博物馆内部、校园内各建筑内部)的定位手段,而在室外仍用北斗定位等方式。当前比较流行的Wi-Fi 定位是无线局域网络系列标准之IEEE802.11的一种定位解决方案。该系统采用经验测试和信号传播模型相结合的方式,易于安装,需要很少基站,能采用相同的底层无线网络结构,系统总精度高。Wi-Fi绘图的精确度大约在1米至20米的范围内,总体而言,它比蜂窝网络三角测量定位方法更精确。但是,如果定位的测算仅仅依赖于哪个Wi-Fi的接入点最近,而不是依赖于合成的信号强度图,那么在楼层定位上很容易出错。目前,它应用于小范围的室内定位,成本较低。但无论是用于室内还是室外定位,Wi-Fi收发器都只能覆盖半径90米以内的区域,而且很容易受到其他信号的干扰,从而影响其精度,定位器的能耗也较高。利用 Wi-Fi 可以覆盖一个十万平米的商场,费用几十万元,在这个商场中不仅可以做到米级的定位,还可以满足上网需求(在商场中用户的需求中,上网的需求远远大于室内定位导航的需求)。Wi-Fi 定位并不是不能做亚米级乃至分米级的定位,英国的研究机构就用 Wi-Fi 技术来探测墙后恐怖分子的肢体活动,当然这个成本目前也不是大众消费市场所能负担的。Wi-Fi需要60~140m配置基站继续覆盖。
技术分析的理论及方法介绍100分
技术分析的理论及方法介绍
返回上一级
单选题(共 3 题,每题 10 分)
1 . KDJ 指标用目前股价在近一阶段股价分布中的相对位置来预测可能发生的趋势反转,并以此作为短期 投资信号的一种指标,其取值范围在 0-100 之间,( )为超买区,( )为超卖区。
?
A.20 80
?
B.30 70
?
C.80 20
?
D.70 30
我的答案: C
2 . 哪种形态是因为投资者的情绪急剧亢奋所形成,通常出现在长期上升的最后阶段,是顶部反转突破的
重要形态,由三个高点和两个低点组成。( )
?
A.头肩顶
?
B.头肩底
?
C.三重顶
?
D.双重顶
?
E.喇叭形
我的答案: E
3 . 在股价下跌一段时间后形成的 K 线组合形态中,空方力量已成强弩之末,而多方势力蓄势待发,典型
的底部形态有( )。
?
A.黄昏之星
?
B.射击之星
?
C.吊颈线
?
D.早晨之星
我的答案: D
多选题(共 6 题,每题 10 分)
1 . 支撑线或压力线对当前股价的影响主要有哪几个方面( )?
?
A.股价在此区域停留的时间长短
?
B.股价在此区域伴随的成交量大小
?
C.股价在此区域波动的幅度高低
?
D.该支撑区域和压力区域发生的时间距离当前时间的远近
我的答案: ABD
2 . 道氏理论的主要原理有哪些?( )
无线定位技术
无线定位技术: 现在的社会,是一个没有隐私的社会,只要有设备和条件,别人想跟踪你的位置实在是太简单了,不管是你在大街上走还是在商场里逛,只要上面想,你的行踪都很难不被暴露。好比我们看大片,罪犯在这边打电话,FBI在那边定位,唧唧几声,就把你的大概方位确定了。千万别以为这是什么高深技术,我们天朝网警照样玩的转。而且,随着网络越来越向智能化和移动化发展,一些很有意思的应用都可能和将来的定位技术联系起来,在一定程度上影响我们的生活,比如twitter,Aardvark,包括一些很有前途的mobile game,等等。 Google Latitude一出后, 很多朋友都惊诧于无gps条件下其定位的准确性,也有不少人因此对通过wifi定位比较感兴趣。其实各式各样的无线通信技术都可以用来定位,由于通信距离的不同,有的可以用来室内定位,有的可以用来室外定位。 这里,我尝试着对一些逐渐在普及的定位技术做一些讲解,考虑到GPS的普及性, GPS定位原理和优缺点就在这里忽略了。其实无线定位的流程很简单,大概都遵从交换信号===>数据融合===>建模求解的步骤。下面就针对不同技术的不同重点,把这个过程分割介绍。 手机基站网络 通过基站网络的检测来进行户外定位是一个相对成本低, 成熟, 但是精度不高 的方法. 它的工作原理是这样的, 我们都知道, 手机要通信, 就需要通过蜂窝 网络和一个个基站交换数据,从而实现和别的手机的通信. 而考虑到双方通信的距离和现实中基站的放置密度,每一个手机都可能被覆盖于多个基站,如果能通过某种方法得到每个基站对于手机的检测数据,通过特定的data fusion技术,就可以大致估算初当前手机的位置。在这里,data fusion是最关键的技术,事实上也是下面会介绍的大多数其他定位技术的基础,所以花多点篇幅介绍一下。为了简化,我们只考虑二维平面情况,也就是说每个点都只有(x,y)值, 不考虑z平面。 以前常用的data fusion技术包括TOA — time of arrival data fusion, AOA — angle of arrival data fusion, 以及混合型技术. 假设下面这张图是一个分布示意图, 图中出现的几个基站(Base Station)都能和当前手机, 也就是MS(Mobile Station)所在位置通信.
图像定位及跟踪技术大解析
图像定位及跟踪技术大解析 在科学技术日新月异的今天,人们对机器设备的智能性、自主性要求也越来越高,希望其完全替代人的角色,把人们从繁重、危险的工作任务中解脱出来,而能否像人一样具有感知周围环境的能力已成为设备实现智能化自主化的关键。 广义的“图像跟踪”技术,是指通过某种方式(如图像识别、红外、超声波等)将摄像头中拍摄到的物体进行定位,并指挥摄像头对该物体进行跟踪,让该物体一直被保持在摄像头视野范围内。狭义的“图像跟踪”技术就是我们日常所常谈到的,通过“图像识别”的方式来进行跟踪和拍摄。 因为红外、超声波等方式,都受环境的影响,而且要专门的识别辅助设备,在实际应用中已经逐步被“图像识别”技术所替代。“图像识别”是直接利用了摄像头拍摄到的图像,进行NCAST图像差分及聚类运算,识别到目标物体的位置,并指挥摄像头对该物体进行跟踪。 图像跟踪系统采用特有的NCAST目标外形特征检测方法,被跟踪者无需任何辅助设备,只要进入跟踪区域,系统便可对目标进行锁定跟踪,使摄像机画面以锁定的目标为中心,并控制摄像机进行相应策略的缩放。系统支持多种自定义策略,支持多级特写模式,适应性强,不受强光、声音、电磁等环境影响。 目标物体的边缘检测 物体的形状特征在大多数情况下变化不多,基于目标形状轮廓的跟踪方法与基于区域的匹配方法相比,可以更精确的分割目标。 边缘是运动目标的最基本特征,表现在图像中就是指目标周围图像灰度有阶跃变化或屋顶变化的那些像素集合,它是图像中局部亮度变化最显著的部分。 边缘检测就是采用某种算法来定位灰度不连续变化的位置,从而图像中目标与背景的交界线。图像的灰度变化可以用灰度梯度来表示。
CS技术分析的理论及方法介绍答案
C S技术分析的理论及 方法介绍答案 集团企业公司编码:(LL3698-KKI1269-TM2483-LUI12689-ITT289-
C18044S技术分析的理论及方法介绍答案单选题(共3题,每题10分)? 1.在股价下跌一段时间后形成的K线组合形态中,空方力量已成强弩之末,而多方势力蓄势待发,典型的底部形态有(D)。 A.黄昏之星 B.射击之星 C.吊颈线 D.早晨之星 2.在波浪理论中,哪一浪是最大、最有爆发力(价格往往跳空)的上升浪,行情持续的时间与幅度经常是最长的,投资者信心恢复,成交量大幅上 升。(C) A.第一浪 B.第二浪 C.第三浪 D.A浪 E.B浪 3.KDJ指标用目前股价在近一阶段股价分布中的相对位置来预测可能发生的趋势反转,并以此作为短期投资信号的一种指标,其取值范围在0-100之间,(C)为超买区,(C)为超卖区。 A.2080
B.3070 C.8020 D.7030 多选题(共6题,每题10分) 1.切线的种类包括(ABCD)等。 A.趋势线 B.轨道线 C.黄金分割线 D.百分比线 2.OBV线亦称能量潮,是将成交量值予以数量化,制成趋势线,配合股价趋势线,从价格的变动及成交量的增减关系,推测市场气氛,其应用法则 为(ABCD)。 A.当股价上升(下降),而OBV也相应地上升(下降),则可确认当前的上升(下降)趋势 B.当股价上升(下降),而OBV并未相应的上升(下降),出现背离现象,则对当前上升(下降)趋势的认可程度要大打折扣,成交量后劲不足,股 价有反转的可能 C.形态学和切线理论也同样适用于OBV曲线,顶背离、底背离 D.当股价进入盘整区,OBV曲线如率先出现脱离盘整的信号,则股价向上或向下突破可能性增大
红外线激光定位灯讲解
红外线激光定位灯产品可广泛应用于各类工业加工机械,能起辅助标线与定位作用,如:轮胎成型机、木工机械、钢板划线定位、五金剪压机械、成衣加工、裁床裁剪对格与对条、纺织印染标示、制鞋机定位、运动器材加工、玻璃加工机械、电子 SMT 定位定格、印刷电路板标示定位、印刷机标示定位及建筑装潢等行业。 特点:红外线激光定位灯产品的安装机使用简单方便, 可安装在使用机械的垂直或水平面上, 提供一条可见的激光标线, 使得在整个生产过程中有一条可见的、非接触的定位线指导操作过程。具有方便生产操作和提高生产效率的优点。激光线可在三维空间任意微调, 已达到最佳使用效果。 应用领域 红外线激光定位灯安装使用简单方便, 通电即可使用, 可广泛应用于轮胎成型机、纸张裁切机、金属锯床、 pcb 电路板切割机等工业机械的辅助定位,能较大幅度的提高工作效率。一字线激光器线条清晰,小巧,易于安装。 参数 光斑形状:一字线型 波长:532nm 635nm 650nm(可定制 管芯功率:0~200mw(按要求定制 工作电流:0~2000mA(可定制 工作电压:5V 12V 24V 36V 外形尺寸:Φ16×55mm Φ16×80mm Φ22×85mm Φ26×110mm (可选择 光束发散度:0.3~1.5mrad 出光张角:10 o~135o
光线直径:≤ 0.5mm @0.5m ;≤ 1.0mm @3.0m ;≤ 1.5mm @6.0m ; 直线度:≤ 1.0mm @3.0m 光学透镜:光学镀膜玻璃或塑胶透镜 工作温度 :-10~75℃ 储存温度 :-40~85℃ 工作介质:半导体 等级:Ⅲ b 可选配:专用支架、电源 yxl
怎样像定位系统一样跟踪人而不被发现
怎样像定位系统一样跟踪人而不被发现(草稿)编辑 译者:鹿鸣音原作者:ERIC RAVENSCRAFT 发表时间:1970-01-01浏览量:0评论数:0挑错数:0 跟踪他人通常都不是一个好主意,除非你有私家侦探的执照,但它不会对已经知道到这种行为是如何进行的人造成伤害,所以你可以学会在可能发生这种情况的时候保护自己。
很有必要指出的是,尽管各州的法律各有所不同,跟踪他人不仅是一个粗鲁的侵犯他人隐私的行为,如果它可以认为是跟踪或骚扰他人的话,也很可能是非法行为。你可以阅读更多关于跟踪在每一个国家的法律,在那里这种行为是合法的。然而,在一般情况下,在没有征得他们的同意的情况下跟踪某人,这是一个非常糟糕的想法。在这篇文章中许多的技术都是以供私家侦探,或是有明确的许可可以去做这样的事情的情况下使用。这些信息是为了帮助你识别那些想要跟踪你的人,可以帮你注意到这种的迹象。我们不推荐个人自己来尝试这个。P 提前P学习他们的行为习惯
如何利用互联网来研究你的,你同事的,或新朋友的下一步行动(不怪)你想知道一些关于互联网的信息或在工作中潜在的新员工,但你不一定需要一个全面彻底的……了解… 这取决于你对你要跟随的人的了解程度,这可能是说起来容易做起来难。然而,你对你的目标的习惯了解更多信息,你就更可能会知道他们将要去的地方。我们已经涵盖了如何在线研究一个人而没有那么多麻烦的内容。人不可能总是把他们最邪恶的秘密发布在微博上,但一个家庭地址,工作地址,和附近的显著地点的信息(杂货店,学校,等)可以给你提供一个相当好的猜测,他可能会在一个什么样看似平常的日子,选用什么路径的,以及这样普通的外出会干些什么P。 从装备中看到(或记录)
室内定位应用及解决方案详解
室内定位应用及解决方案详解 一、什么是室内定位?如何实现室内位置定位? 在室内环境无法使用卫星定位时,使用室内定位技术作为卫星定位的辅助定位,解决卫星信号到达地面时较弱、不能穿透建筑物的问题。最终定位物体当前所处的位置。 室内定位是指在室内环境中实现位置定位,主要采用无线通讯、基站定位、惯导定位等多种技术集成形成一套室内位置定位体系,从而实现人员、物体等在 室内空间中的位置监控。 二、做室内定位比较好的公司有哪些? 近几年做室内定位的创业公司比较多,怎么选择做室内定位比较好的公司?要看该企业是否能够做到满足室内定位用户需求,同时优化成本也是至关重要的一个方面。 例如恒高科技提出从方案设计、安装、运维三方面来优化产品成本投入。 1.方案设计 方案设计的目标是针对不同应用场景设计产品,降低成本投入。能想象到,水电站、化工厂中的室内定位技术部署方式和博物馆、自动驾驶中的部署方式一 定有区别,如果设计方案不适合所应用场景,必然将影响研发、生产等一系列环节,增加时间或人才投入,进而增加成本投入。 当然,并不是说不同应用场景的部署方式一定不同。对于做室内定位服务方案的企业来说,要做的便是归纳用户实际需要,找到共性之后将用户需求分门别类,从而快速完成方案设计。
谈到用户需求的分类方法,按照定位制式可分为两类:跟踪定位(被动定位)和导航定位(主动定位);按照TDOA定位方法也可分两类:下行TDOA和上行TDOA 两者在定位标签容量、定位动态、定位标签功耗、定位基站功耗方面各有优势,如下图所示。 下IfTPOA与上行TPOA定位方法对比 宦位标签容量 F 行TDOA>上行eoA 定位动态下行TPOA<上行TPOA 定位标签功耗下行丁DOA>上行TPOA 方仿总站功择T 行丁DQA卜irTDHA 以上四种方式自由组合,即能应用在不同场景之中。例如建筑工地、火电厂、水电站、化工厂等通常需要跟踪、导航定位兼得,上/下行TDOA兼得;监狱、港口码头、养老院/疗养院等只需跟踪室内定位与上行TDOA而机器人、无人机、自动驾驶汽车、景区导航等只需导航室内定位与下行TDO A总的来说,方案设 计必须依据应用场景与用户需求来定,不可改变。 2.安装
CS技术分析的理论及方法介绍汇总答案分
C S技术分析的理论及方法介绍汇总答案分集团企业公司编码:(LL3698-KKI1269-TM2483-LUI12689-ITT289-
C18044S技术分析的理论及方法介绍参考答案 单选题(共3题,每题10分)? 1.在股价下跌一段时间后形成的K线组合形态中,空方力量已成强弩之末,而多方势力蓄势待发,典型的底部形态有(D)。 A.黄昏之星 B.射击之星 C.吊颈线 D.早晨之星 2.在波浪理论中,哪一浪是最大、最有爆发力(价格往往跳空)的上升浪,行情持续的时间与幅度经常是最长的,投资者信心恢复,成交量大幅上 升。(C) A.第一浪 B.第二浪 C.第三浪 D.A浪 E.B浪 2.KDJ指标用目前股价在近一阶段股价分布中的相对位置来预测可能发生的趋势反转,并以此作为短期投资信号的一种指标,其取值范围在0-100之间,(C)为超买区,()为超卖区。 A.2080 B.3070
C.8020 D.7030 多选题(共6题,每题10分) 1.切线的种类包括(ABCD)等。***** A.趋势线 B.轨道线 C.黄金分割线 D.百分比线 2.OBV线亦称能量潮,是将成交量值予以数量化,制成趋势线,配合股价趋势线,从价格的变动及成交量的增减关系,推测市场气氛,其应用法则 为(ABCD)。 A.当股价上升(下降),而OBV也相应地上升(下降),则可确认当前的上升(下降)趋势 B.当股价上升(下降),而OBV并未相应的上升(下降),出现背离现象,则对当前上升(下降)趋势的认可程度要大打折扣,成交量后劲不足,股价有反转的可能 C.形态学和切线理论也同样适用于OBV曲线,顶背离、底背离 D.当股价进入盘整区,OBV曲线如率先出现脱离盘整的信号,则股价向上或向下突破可能性增大 3.反转突破形态可以有哪些?(ABCD)
WiFi定位原理介绍
Wi-Fi实时定位系统 基于Wi-Fi的无线局域网实时定位系统(Wi-Fi RTLS)结合无线局域网络(WLAN)、射频识别(RFID)和实时定位等多种技术,广泛地应用在有无线局域网覆盖的区域,实现复杂的人员定位、监测和追踪任务,并准确搜寻到目标对象,实现对人员和物品的实时定位和监控管理。 无线局域网(WLAN)介绍 无线局域网(WLAN,又称Wi-Fi)是在不采用传统电缆线的同时,提供传统有线局域网的所有功能,网络所需的基础设施不再埋在地下或隐藏在墙里,网络却能够随着你的需要移动或变化。与有线网络相比,WLAN最主要的优势在于不需布线,不受布线条件的限制,因此非常适合移动办公用户的需要。目前它已经从传统的医疗保健、库存控制和管理服务等特殊行业向更多行业拓展,甚至开始进入家庭以及教育机构等领域。 无线局域网是基于国际IEEE 802.11标准。标准规定无线网络发射功率不可超过100毫瓦,实际发射功率约60~70毫瓦,手机的发射功率约200毫瓦至1瓦间,手持式对讲机高达5瓦。无线网络使用方式并非像手机直接接触人体,对人体是安全的。 一般WLAN能覆盖的范围应视环境的开放与否而定。若不加外接天线,在视野所及之处约250米;若属半开放性空间,有间隔的区域,则约35~50米左右。加上外接天线,则距离可达更远,这与天线增益值相关,需视用户需求而定。 AP为Access Point简称,一般翻译为“无线访问节点”,或“桥接器”。它主要在媒体存取控制层MAC中扮演无线工作站及有线局域网络的桥梁。有了AP,就像一般有线网络的Hub一般,无线工作站可以快速且轻易地与网络相连。 工作原理
声波跟踪定位系统
3 声波跟踪定位系统 3.1. 跟踪定位技术概述 本设计要求实现的是利用声定位技术进行探头定位的手动超声扫描成像系统,因此,必须研制与此相适应的跟踪装置,而传感器技术是实现这一功能的关键硬件。现实中用到的跟踪装置的原理主要有声学、光学和磁性三种。根据本设计的特点,要求的是对钢板的内部的缺陷进行检测,采用光学的设备显然不合适,因为光通常沿直线进行传播,方向具有很强的单一性,这不利于跟踪定位;磁性原理就更不适用了,因为所检测是钢铁类的材料,磁性跟踪定位的使用将会造成钢铁材料的磁化,从而使得跟踪定位很难实现。所以选用声波跟踪定位系统。实现声波跟踪定位,从而准确地确定探头所扫描点的位置是声波定位的最终目的。以下是通用的声波跟踪系统原理的介绍。 3.2. 声波跟踪定位原理 基于声波测距的平面定位系统是采用声学测量的方法。过去人们往往认为超声波测距的精度一般不会很高,但这种基于超声波测距平面跟踪定位系统具有比较高的精度。超声波传感器检测距离的手段多种多样,但最主要的方法是检测渡越时间。渡越时间是指声波从发射器发出到声波接收器接收到声波所经历的时间间隔。声源与目标之间的距离与声波在声源与目标之间传播所需的时间成正比,测量出渡越时间就可计算出声源与目标之间的距离。根据多个不同位置的声波对同一个声波发射器进行测距,通过计算可确定这个声波发射器在二维空间的位置。这种测量距离的方法对对象的材料性质依赖较小,并且不受电磁波、粉尘等干扰。 其二维定位原理是:利用如下测量原理可以实现二维定位与定向。设在参考坐标系的X轴上分别安装有2个超声波接收器R1、R2,同时在要检测的物体安装有声波发射器S。如图3-2-1所示。
七大室内定位技术PK
七大室内定位技术P K Document serial number【LGGKGB-LGG98YT-LGGT8CB-LGUT-
七大室内定位技术PK 随着LBS和O2O搅得火热,定位技术近年来也备受关注且发展迅速。虽然室外定位技术已经非常成熟并开始被广泛使用,但是作为定位技术的末端,室内定位技术发展一直相对缓慢。而随着现代人类生活越来越多的时间都处在室内,室内定位技术的前景也非常广阔。 但虽然作为LBS最后一米的室内定位饱受关注,但技术的不够成熟依然是不争的事实。不同于GPS,AGPS等室外定位系统,室内定位系统依然没有形成一个有力的组织来制定统一的技术规范,现行的技术手段都是在各个企业各自定义的私有协议和方案下发展,也致使各种室内定位技术相映生辉。 下面我们就从精确度,穿透性,抗干扰性,布局复杂程度,成本5个方面全方位来比较一下市面上流行的几种室内定位手段。 红外线定位技术 精确度:★★★★☆ 穿透性:☆☆☆☆☆ 抗干扰性:☆☆☆☆☆ 布局复杂程度★★★★★ 成本:★★☆☆☆ 红外线室内定位有两种,第一种是被定位目标使用红外线IR标识作为移动点,发射调制的红外射线,通过安装在室内的光学传感器接收进行定位;第二种是通过多对发射器和接收器织红外线网覆盖待测空间,直接对运动目标进行定位。 红外线的技术已经非常成熟,用于室内定位精度相对较高,但是由于红外线只能视距传播,穿透性极差(可以参考家里的电视遥控器),当标识被遮挡时就无法正常工作,也极易受灯光、烟雾等环境因素影响明显。加上红外线的传输距离不长,使其在布局上,无论哪种方式,都需要在每个遮挡背后、甚至转角都安装接收端,布局复杂,使得成本提升,而定位效果有限。 红外线室内定位技术比较适用于实验室对简单物体的轨迹精确定位记录以 及室内自走机器人的位置定位。 超声波室内定位技术 精确度:★★★★★ 穿透性:★☆☆☆☆ 抗干扰性:★★★☆☆
无线定位技术
填空题 1.GSM的鉴权身份认证:IMSI 手机的IMSI 身份证,核心网络和手机上都有,进行比对。身份证必须有防伪机制才能保证它的安全使用。GSM系统的鉴权体制用户标识和密码 手机打电话或者上网之前,首先要向移动网络提供自己的用户标识和密码2.GSM基站广播内容 GSM广播频率校正信号、同步信号、基站的标识、空中接口的结构参数 3.位置更新的三种情况 手机开机,周期性更新上报,移动小区 4.GSM的采样频率是多少?为什么使用这个频率? GSM手机釆样频率是8khz。 语音信号的频率通常在300~3400Hz之间,抽样频率应大等于两倍的抽样信号频率,才能不失真。 5.GSM900、GSM1800分别有多少个频点以及载频间隔是多少? GSM900有124个频点,GSM1800有374个频点,载频间隔为200KHz 6.关于切换方式 硬切换,软切换”接力切换 7.MS,BTS,MSC,IMSI,HLR分别是什么意思 MS移动台 BTS基站收发信机 MSC移动交换中心 IMSI 国际移动用户识别 HLR 归属位置寄存器 8.无线通信和有线通信的区别 无线通信和有线通信的区别主要在于接口和信道,无线通信的接口是空中接口,信道是电磁波等,有线通信的接口是固定接口,信道是电线等有形信道。 9.无线通信信道编码的几种方式 10.语言编码和空中接口发送的速率 空中接口发送速率:22.8bit/s 11.列出几种纠错方法 0检错重发法,前项纠错发,反馈校正法。 12.信源编码和信道编码的目的 信源编码是以提高通信有效性为目的的编码。信道编码是以提高信息传输的可靠性为目的的编码。 13.列出几种调制方法 幅移键控,频移键控,相移键控 14.简述数据率和带宽的区别 数据率是数据能够进行通信的速率单位是bit/s,可以指调制速率;带宽指的是传输信号所占的带宽单位是Hz,值得是频谱宽度。 15.列出三种复用技术 时分复用,空分复用,频分复用 16.模数转换三过程 采样,量化,编码
七大室内定位技术PK
七大室内定位技术PK
七大室内定位技术PK 随着LBS和O2O搅得火热,定位技术近年来也备受关注且发展迅速。虽然室外定位技术已经非常成熟并开始被广泛使用,但是作为定位技术的末端,室内定位技术发展一直相对缓慢。而随着现代人类生活越来越多的时间都处在室内,室内定位技术的前景也非常广阔。 但虽然作为LBS最后一米的室内定位饱受关注,但技术的不够成熟依然是不争的事实。不同于GPS,AGPS等室外定位系统,室内定位系统依然没有形成一个有力的组织来制定统一的技术规范,现行的技术手段都是在各个企业各自定义的私有协议和方案下发展,也致使各种室内定位技术相映生辉。 下面我们就从精确度,穿透性,抗干扰性,布局复杂程度,成本5个方面全方位来比较一下市面上流行的几种室内定位手段。 红外线定位技术
超声波室内定位系统是基于超声波测距系统而开发,由若干个应答器和主测距器组成:主测距器放置在被测物体上,向位置固定的应答器发射同无线电信号,应答器在收到信号后向主测距器发射超声波信号,利用反射式测距法和三角定位等算法确定物体的位置。 超声波室内定位整体精度很高,达到了厘米级,结构相对简单,有一定的穿透性而且超声波本身具有很强的抗干扰能力,但是超声波在空气中的衰减较大,不适用于大型场合,加上反射测距时受多径效应和非视距传播影响很大,造成需要精确分析计算的底层硬件设施投资,成本太高。 超声波定位技术在数码笔上已经被广泛利用,而海上探矿也用到了此类技术,室内定位技术还主要用于无人车间的物品定位。 射频识别(RFID)室内定位技术 精确度:★★★★★ 穿透性:★★★☆☆ 抗干扰性:★★☆☆☆ 布局复杂程度★★☆☆☆ 成本:★★☆☆☆ 射频识别室内定位技术利用射频方式,固定天线把无线电信号调成电磁场,附着于物品的标签进过磁场后感应电流生成把数据传送出去,以多对双向通信交换数据以达到识别和三角定位的目的。(感应门禁卡和商场防盗系统用的就是这种技术) 射频识别室内定位技术作用距离很近,但它可以在几毫秒内得到厘米级定位精度的信息,且由于电磁场非视距等优点,传输范围很大,而且标识的体积比较小,造价比较低。但其不具有通信能力,抗干扰能力较差,不便于整合到其他系统之中,且用户的安全隐私保障和国际标准化都不够完善。 射频识别室内定位已经被仓库、工厂、商场广泛使用在货物、商品流转定位上。
哈工大无线定位原理与技术实验报告
无线电定位原理与技术 实验报告 课程名称:无线电定位原理与应用 院系:电子工程系 班级:1305203 姓名:黄晓明、大头光 学号:指导教师:张云 实验时间:12周周二,13周周二 实验成绩: 电信学院
实验一 调频法测距实验 2.1 实验要求 1.掌握调频法测距原理 2.利用给定的仿真信号通过MA TLAB 编程计算线性调频信号的参数(带宽,中心频率,时宽,调频斜率)并计算目标的距离。 2.2 线性调频脉冲测距实验 图2-1 线性调频信号与反射回波 反射回波相对于发射的线性调频信号产生了固定时延或固定频差F ? 。假设目标处于静止状态,总的频偏F ?为 2R F c α ?= (2.1) 根据该式可以反推出距离R 。 图1线性调频信号与反射回波时域图
图2混频后频谱图 图3
根据公式 2c F R α ?= (2.2) 解得R=750m ,与5us 延迟一致。 积化和差公式: 1 cos cos [cos()cos()]2 αβαβαβ=++- (2.3)
实验二 连续波雷达测速实验 3.1 实验要求 1. 掌握雷达测速原理。 2. 了解连续波雷达测速实验仪器原理及使用。 3. 采集运动物体回波数据,并在PC 机使用Matlab 对实验数据进行分析。 4. 使用Matlab 对实验数据进行分析,得到回波多普勒频率和目标速度。 3.2 雷达测速原理 00022d r vf v f f f f c v c --?? =-= ≈ ?+?? (如果v c <<) 图3-1 多普勒效应 3.2 连续波雷达测速实验仪器 连续波发射机 混频器 放大滤波 测速传感器 AD 采集 串行接口PC 机 图3-2 连续波雷达测速实验仪器原理框图
机床专用定位红外线
机床专用定位红外线 Red Line Laser Module (cl)本产品采用原装进口激光二极管,体积小,光线清晰,出光张角大,直线度高。我们可以制作固定焦点同时可以制作可调焦的红光线状激光器,请打零贰玖捌捌柒贰陆柒柒叁客户可以根据各种要求调整焦点。 The laser has original import laser diode, small body and clear beam. The fan angle and line degree is high. We can offer red Line Laser Module with focus adjustable or fixed. Customer also can adjust the focus according various requirements. 输出波长:635nm 650nm 660nm 输出功率:635nm 0.5~30mw 650nm 0.5~200mw 660nm 0.5~300mw 工作电压:2.7~24V DC 工作电流:≤450mA 光束发散度:0.1~1.5mrad 出光张角:10o~135o 光线直径:≤0.5mm @0.5m;≤1.0mm @3.0m;≤1.5mm @6.0m; 直线度:≤1.0mm @6.0m 光学透镜:光学镀膜玻璃或塑胶透镜 尺寸:Φ8×25mm;Φ9×35mm;Φ11×37mm;Φ12×40mm;Φ16×55mm;Φ16×65mm;Φ16×80mm;Φ22×85mm;Φ26×110mm(可定制) 工作温度:-10~75℃ 储存温度:-40~85℃ 激光等级:Ⅲb Output wavelength: 635nm 650nm 660nm Output power: 635nm 0.5~30mw 650nm 0.5~200mw 660nm 0.5~300mw Operating voltage: 2.7~24V DC Operating current: ≤450mA Beam divergence: 0.1~1.5mrad Fan angle: 10o~135o Beam diameter: ≤0.5mm @0.5m;≤1.0mm @3.0m;≤1.5mm @6.0m Line degree: ≤1.0mm @6.0m Optics: coated glass lens or plastic lens Size: Φ8×25mm;Φ9×35mm;Φ11×37mm;Φ12×40mm;Φ16×55mm;Φ16×65mm; Φ16×80mm;Φ22×85mm;Φ26×110mm(made as requirement) Operating temperature: -10℃~75℃ Storage temperature:-40℃~85℃ Laser classification: Ⅲb
室内定位技术发展与应用研究
第 40卷第6期 测绘与空间地理信息 V 〇L40,N 〇.62017 年 6 月 GEOMATICS & SPATIAL INFORMATION TECHNOLOGY Jim.,2017 室内定位技术发展与应用研究 周源,刘禹鑫,林富明 (国家测绘地理信息局黑龙江基础地理信息中心,黑龙江哈尔滨150081) 摘 要 :目前,全球卫星导航系统是获取室外环境位置信息最常用的技术手段,但由于卫星信号易被遮挡,并不 适用于室内或者高楼林立的复杂场合,因此,室内定位技术作为室外定位的有力补充迅速发展。本文通过介绍 目前主流室内定位方式及关键技术,结合室内定位技术的研究现状,深入挖掘了室内定位技术的潜在价值及广 阔前景,并提出具体创新应用方向,力求构建深层面的智慧位置平台。 关键词:室内定位;WI - F I ;定位数据;关键技术;应用前景;位置服务中图分类号:P 236 文献标识码:A 文章编号:1672 -5867(2017)06 -0054 -04 Research on the Development and Application of Indoor Positioning Technology ZHOU Yuan , LIU Yu -xin , LIN Fu - ming (Heilongjiang Geomatics Center of NASMG, Harbin 150081, China) Abstract : At present , the Global Navigation Satellite System (GNSS ) is the most commonly used technical means accessing to outdoor environment location information , but the satellite signal is easily blocked and does not apply to the complex situations , such as indoor or high - rise buildings , so as the powerful supplement of outdoor positioning , indoor positioning technology is rapidly developing . Through the introduction of the method and key technology of current mainstream indoor positioning and combined with the research status of indoor positioning technology , the paper deeply digs the potential value and broad prospects of the indoor positioning technolo -gy , puts forward the specific innovation application , and strives to build the Smart Location Platform .Key words : indoor positioning ; WI - FI ; location data ; key technology ; application prospect ; LBS 〇引言 随着人类社会的进步,人们越来越关注自身的精确 位置信息,以及兴趣点的定位与导航。GNSS 提供了有效 的室外定位手段,成为很多人的必备工具。但是卫星导 航也有它的不足:在高楼林立的城市区域以及大型场馆 的室内环境,卫星定位的精度会大幅降低,甚至无法定 位。随着人们对精准性和速度的要求越来越高,对室内 定位的需求也十分迫切,定位与位置服务“最后一公里”问题日益突出,室内定位凸显了其作用与价值。 常规的室内定位技术手段是:通过在室内有效布置 基站,用户凭借手机等工具在基站中产生包括距离和信 号强度等指纹特征,再根据多个基站的指纹交叉确定用 户的位置。目前,已经投入应用的基站类型包括Wi - Fi 、 收稿日期=2016 -08 -29 基金项目=2016年国家基础测绘科技计划项目测绘新技术系统开发与示范应用子课题室内外高精度无缝定位技术研究与智慧位置 示范系统构建(2016 KJ 0102)资助 作者简介:周源(1981 -),男,吉林省吉林市人,工程师,硕士 ,2007年毕业于东北林业大学森林经理学专业,主要从事地理信息系 统研发、位置服务应用研究工作。 蓝牙、室内LED 灯、有源RFID 、UW B 等多种方式。此外, 有研究机构正积极开展基于多媒体的室内定位技术研 究,并获得初步成果。完善的室内定位技术,将是整合Wi -Fi 、蓝牙等基站数据的解算,配合手机或平板设备的陀 螺仪、摄像头、麦克风等自身硬件姿态参数,得出最终用 户位置,通过多种途径,实现室内条件下的精准定位。 1室内定位及应用关键技术 1.1主要室内定位方法 目前,室内定位技术百花齐放,除主流的Wi - Fi 、蓝 牙定位技术,还有红外线定位技术、超声波室内定位技 术、射频识别(RFID )室内定位技术、ZigBee 室内定位技 术、超宽带室内定位技术[1]。另外,基于计算机视觉、图 像、磁场以及信标等定位方式也已处于开发研究试验阶