自动控制原理复习资料 卢京潮版
第二章:控制系统的数学模型
§2.1 引言
·系统数学模型-描述系统输入、输出及系统内部变量之间关系的数学表达式。
·建模方法???实验法(辩识法)机理分析法
·本章所讲的模型形式???复域:传递函数时域:微分方程
§2.2控制系统时域数学模型
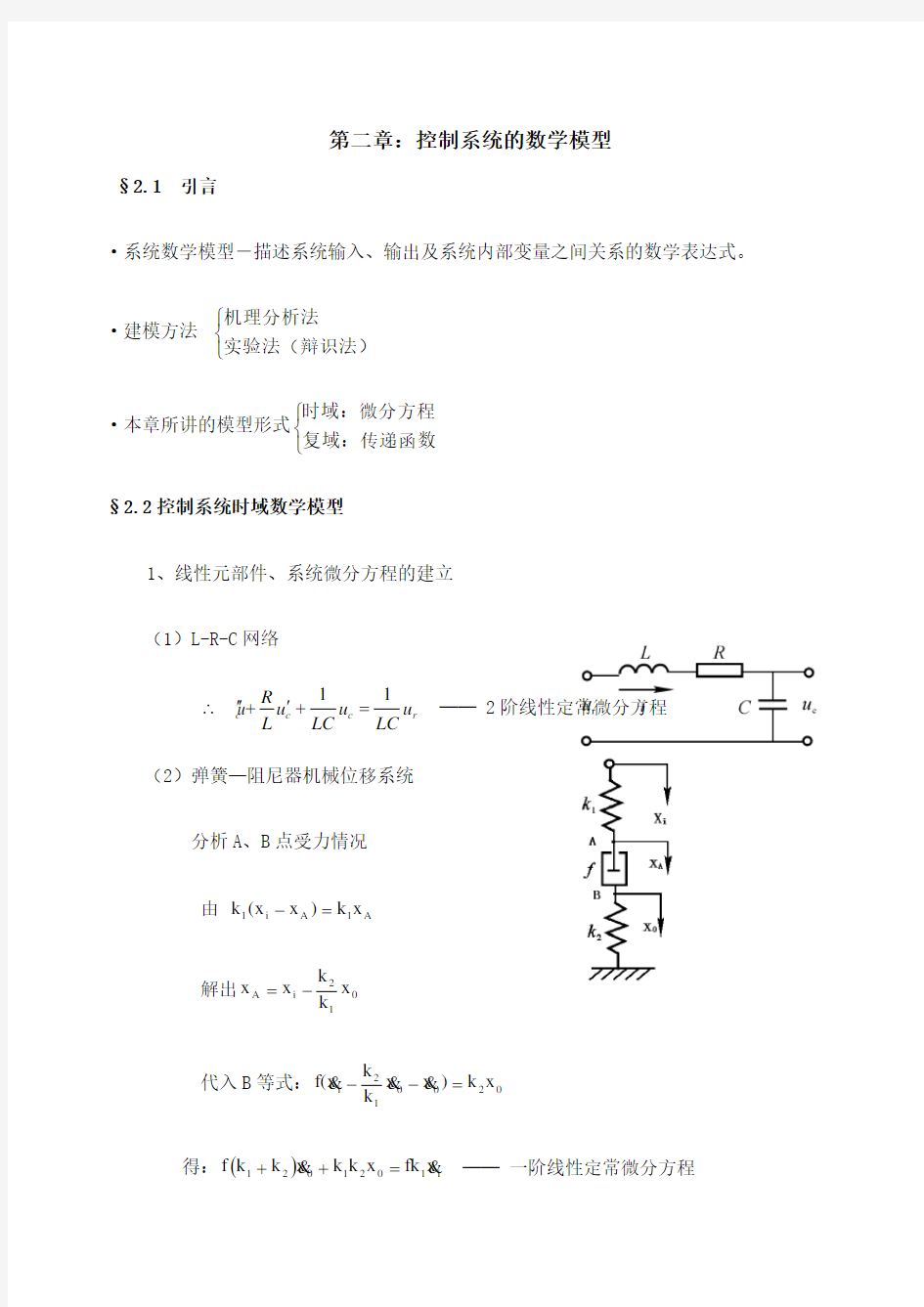
1、线性元部件、系统微分方程的建立 (1)L-R-C 网络
11c
c c r R u u u u L LC LC
'''∴++= ── 2阶线性定常微分方程 (2)弹簧—阻尼器机械位移系统 分析A 、B 点受力情况 由 A 1A i 1x k )x x (k =-
解出01
2
i A x k k x x -
= 代入B 等式:02001
2
i x k )x x k k x f(=--
&&& 得:()i 1021021x fk x k k x k k f &&=++ ── 一阶线性定常微分方程
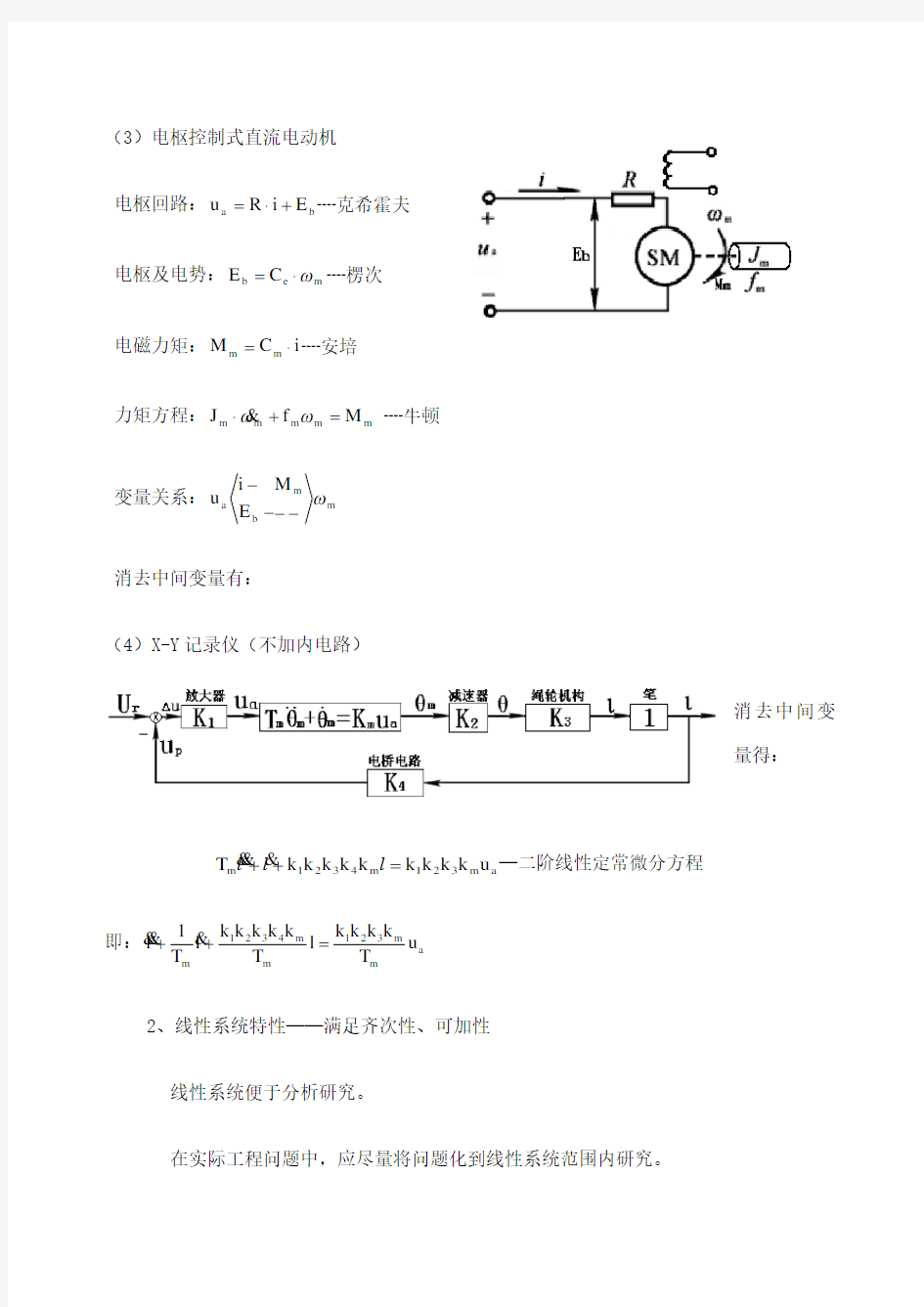
(3)电枢控制式直流电动机 电枢回路:b a E i R u +?=┈克希霍夫 电枢及电势:m e b C E ω?=┈楞次 电磁力矩:i C M m m ?=┈安培
力矩方程:m m m m m M f J =+?ωω& ┈牛顿
变量关系:m m
b a
M E i u ω-
---
消去中间变量有:
(4)X-Y 记录仪(不加内电路)
消去中间变量得:
a m 321m 4321m u k k k k k k k k k T =++l l l &&&─二阶线性定常微分方程
即:a m
m 321m m 4321m u T k k k k l T k k k k k l T 1l =++&&&
2、线性系统特性──满足齐次性、可加性 线性系统便于分析研究。
在实际工程问题中,应尽量将问题化到线性系统范围内研究。
非线性元部件微分方程的线性化。
例:某元件输入输出关系如下,导出在工作点0α处的线性化增量方程
解:在0αα
=处线性化展开,只取线性项:
令 ()()0y -y y αα=? 得 αα??-=?00sin E y 3、用拉氏变换解微分方程 a u l
l l 222=++&&& (初条件为0)
复习拉普拉斯变换的有关内容
1 复数有关概念 (1)复数、复函数 复数 ωσj s += 复函数 ()y x jF F s F += 例:()ωσj 22s s F ++=+=
(2)复数模、相角 (3)复数的共轭
(4)解析:若F(s)在s 点的各阶导数都存在,称F(s)在s 点解析。 2 拉氏变换定义
3 几种常见函数的拉氏变换
1. 单位阶跃:()???≥<=0 t 10
t 0t 1
2. 指数函数:???≥<=0
t e 0
t 0)t (f at
3. 正弦函数:???≥<=0t t sin 0 t
0)t (f ω
4 拉氏变换的几个重要定理
(1)线性性质: [])s (bF )s (aF )t (bf )t (af L 2121+=+ (2)微分定理: ()[]()()0f s F s t f L -?='
()
()()()()()()()()n n-2n 1n n-1n-2
L f t s F s s f 0s f 0sf 0f 0-??'=-----?
?
L 进一步: 零初
始条件下有:()()[]
()s F s t f L n n ?= 例1:求()[]t L δ 例2:求[]t cos L ω
解:[]2
222s s
s s 1
t n si L 1
t cos ω
ωωω
ωωω+=+?
?=
'=
Θ (3)积分定理:()[]
()()()0f s
1
s F s 1dt t f L 1-+?=? (证略)
零初始条件下有:()[]
()s F s 1
dt t f L ?=?
进一步有: 例3:求L[t]=? 解:()dt t 1t ?=Θ
例4:求??
?
???2t L 2
解:?=tdt 2
t 2
Θ (4)位移定理
实位移定理:()[]()s F e -t f L s ?=-ττ
例5:()()s F
0 t 01 t 0 10 t 0t f 求??
?
??><<<= 解:)1t (1)t (1)t (f --=
虚位移定理:()[]
()a -s F t f e L at =? (证略)
例6:求[]
at e L
例7:[]
()
2
2
3
s s 2
23t -5
3s 3
s 5s s cos5t e L +++=
+=
?+→
例8:????
????????
-=??????---)15t (5cos e L )35t (cos e L 2t 2t ππ
(5)终值定理(极限确实存在时)
证明:由微分定理()()()0f s sF dt e t f st 0
-='-∞
?
取极限:()()()0f s sF lim dt e t f lim 0
s st 0
s -='→-∞
→?
∴有:()() s sF lim f 0
s →=∞证毕
例9:()()()
b s a s s 1
s F ++=
求()f ∞
例10:()0s s
lim t sin f 2
20
s t =+≠=∞→∞→ωω
ω 拉氏变换附加作业 一.已知f(t),求F(s)=? 二.已知F(s),求f(t)=? 5.拉氏反变换
(1) 反变换公式:?∞+∞
-=
j j st
ds e ).s (F j 21)t (f σσπ (2) 查表法——分解部分分式(留数法,待定系数法,试凑法) 微分方程一般形式:
)s (F 的一般表达式为:
[]r b r b r b r b C C a C a C m 1-m )1-m (1)m (01-n )1-n (1)n (+'+++=+'+++ΛΛ来自:(I )
其中分母多项式可以分解因式为:
)p s ()p s )(p s ()s (A n 21---=Λ
(II)
)s (A p i 为的根(特征根),分两种情形讨论:
I :0)s (A =无重根时:(依代数定理可以把)s (F 表示为:)
即:若i c 可以定出来,则可得解:而i c 计算公式:
)s (F ).p s (lim c i p s i i
-=→
(Ⅲ)
i
p s 'i )
s (A )
s (B c ==
(Ⅲ′)
(说明(Ⅲ)的原理,推导(Ⅲ′) )
● 例2:3
4s s 2
s )s (F 2+++=
求?)t (f =
解:3
s c
1s c 3)1)(s (s 2s )s (F 21+++=+++=
● 例3:3
4s s 5
5s s )s (F 22++++= ,求?)t (f =
解:不是真分式,必须先分解:(可以用长除法) ● 例4:j
1s c j -1s c j)1j)(s -1(s 3s 22s s 3s )s (F 212
++++=++++=+++=
解法一:
[]
jt
-jt t e )j 2(e )j 2(e 2j
1--+=- (t cos j 2e e ,t sin j 2e e jt jt jt jt =+=---Θ
)
解法二:
II :0)s (A =有重根时:
设1p 为m 阶重根,n 1m s ,s Λ+为单根 .则)s (F 可表示为:
其中单根n 1m c ,c Λ+的计算仍由(1)中公式(Ⅲ) (Ⅲ′)来计算.
重根项系数的计算公式:(说明原理)
●例5 3)
(s 1)s(s 2
s )s (F 2
+++=
求?)t (f =
解:3
s c s c 1s c 1)(s c )s (F 4
312
2++++++=
3.用拉氏变换方法解微分方程
● 例 :u l l r l 222.
..
=++
解:s
2
L(s)22s s L 2=
++]:[ 举例说明拉氏变换的用途之一—解线性常微分方程,引出传函概念。 如右图RC电路:初条件:c0c u )0(u =
输入
[]t 1.E )t (u 0r =
依克西霍夫定律:
L 变换:
依(*)式可见,影响CR电路响应的因素有三个:
r c01:u (t)2:u ?
??输入初条件分析系统时,为在统一条件下衡量其性能
输入都用阶跃,初条件影响不考虑
3:系统的结构参数 ――只有此项决定系统性能
c r U (s)1
CRs 1U (s)
=+零初条件下输入/出拉氏变换之比(不随输入形式而变) §2-3 线性定常系统的传递函数——上述CR电路的结论适用于一般情况
一般情况下:线性系统的微分方程:
r(t)
b (t)r b (t)r b (t)r b C(t)a (t)C a )t (C a )t (C m 1-m )1-m (1)m (0n 1-n )1-n (1)n (+'+++=+'+++ΛΛ简单讲一下: 传递函数的标准形式:
I:D(s)为首1多项式型:根轨迹增益:K S K T
1S T K G (s)**
α+=+
= II:D(s)为尾1多项式型: 开环增益:K 1
TS K
G(s)+=
开环增益的意义:
一般情况下:
首1型:[
][
]
*
1n *1n *
m
1m *1m *-n 1m 1*n a
s a s s b s b s K )p s ()p s (s )z s ()z s (K G(s)l
l l l l l -++++++=----=----ΛΛΛΛ (1) 尾1型:[][]
1s a s a s 1s b s b )1s T ()1s T (s )1s ()1s (K G(s)1
n 1n 01m 1m 01m 1n ++++++=++++=-----ΛΛΛΛl l l l l
ττ (2) 由(1)式:?????-=-=∏∏==为极点为零点
i -n 1
i i *-n i
m 1
i i *m p )p (a z )z (b l
l (3) 比较(1)(2):
)p (
)z (K a b K K a b K -n 1
i i
m
1
i i
*
*
-n *
m *-n *m *∏∏==--===?l
l
l (4)
首1型多用于根轨迹法中. 尾1型多用于时域法,频域法中. 一 .传递函数定义:
条件:?????==='===='=--0)0(c
)0(c )0(c 0)0(r
)0(r )0(r )
1m ()
1n (ΛΛ 定义:
有关概念:特征式,特征方程,特征根
零点i z ——使0G(s)=的s 值
极点j p ——使∞=G(s)的s 值
n m a b K =:传递函数,增益,放大倍数→
[])s (G s
1
.s lim )c(K a b 0s t 1r(t)n m →==∞== 结构图——系统的表示方法
G(s)分子分母与相应的微分方程之间的
联系:
?
??
前面的系数式分子:前面的系数式分母:)s (R (*))s (C (*)完全取
决于系统本
身的结构参数
注(1)为何要规定零初始条件?
分析系统性能时,需要在统一条件下考查系统:
输入:都用阶跃输入.
初条件:都规定为零——为确定一个系统的起跑线而定. 则系统的性能只取决于系统本身的特性(结构参数) (2) 为何初条件可以为零?
1) 我们研究系统的响应,都是从研究它的瞬时才把信号加上去的. 2) 绝大多数系统,当输入为0时,都处于相对静止状态.
3) 零初始条件是相对的,常可以以平衡点为基点(如小扰动为线性化时) (3) 零初条件的规定,并不妨碍非零初条件时系统全响应的求解.
可以由G(s)回到系统微分方程,加上初条件求解.
二 .传递函数的性质:
1. G(s) : 复函数,是自变量为s 的有理真分式(m ≤n) i i b ,a 均为实常数.
m 1). 实际系统都存在惯性,从微分方程上反映出来,即C(s)的阶次比R(s)阶次高. 反映到G(s)上即有分母阶次n ≥分子阶次m. 2).反证法:设m>n 则: 说明: 2. G(s): 只与系统本身的结构参数有关与输入的具体形式无关. 输入变时,C(s)=G(s)R(s)变,但G(s)本身并不变化 但G(s)与输入、输出信号的选择有关.r(t),c(t)选择不同,G(s)不同.(见前CR 电路.) 3. G(s)与系统的微分方程有直接联系 4. [])t (k L G(s)(t) r(t)δ==→G(s)是系统单位脉冲响应的拉氏变换 5. G(s)与系统相应的零极点分布图对应 G(s)的零极点均是复数,可在复平面上表示: 若不计传递函数,G(s)与其零极点分布图等价. 例:* 2(2) G(s)(3)(22) s s s s K += +++ G(s)?系统零极点分布图 ?系统性能???.动态特性稳定性; 若当系统参数发生变化时,分析其特性: 1) 用解微分方程法十分繁琐——一个元部件参数改变,影响i i b ,a ,得反复解 2) 若掌握了零极点分布与系统性能之间的规律性,则当某个元部件的参数改变 时,i i b ,a 变化,零极点位置变化,系统性能的变化规律就能掌握了,这样,我们可以有目的地改变某些参数,改善系统的性能,且免除了解微分方程的烦恼。——这是为什么采用G(s)这种数模的原因之一。 三. 采用传递函数的局限: 1. G(s)原则上不反映C(0)≠0时的系统的全部运动规律.(虽然由G(s)转到微分方 程,可以考虑初条件的影响。) 2. G(s)只适用于单输入,单输出系统。 3. G(s)只适用于线性定常系统——由于拉氏变换是一种线性变换. 例: [][] [][]出 (s)U (s)使U (s) sU (t)u (t)u L (s) U A(s)(t)u a(t)而L (t)u (t)u BL (t)a(t).u L s (s)RCU (s)U (t) u (t)u B (t)a(t).u (t)u RC (t)u r c c c c c c c c c c r c c c c r 不能得/2 ≠??≠??++?=?++=&&&& 传递函数是古典控制理论中采用的数学模型形式,经常要用。 (典型元部件传递函数略讲,重点以伺服电机引出结构图的概念) 例1 已知某系统,当输入为)(1)(t t r =时,输出为e e t t t C 43 1321)(----= 求: 1) 系统传递函数?G(s) = 2) 系统增益? 3) 系统的特征根及相应的模态? 4) 画出系统对应的零极点图; 5) 系统的单位脉冲响应?=k(t) 6) 系统微分方程; 7) 当(t),r(t))(c ,)c(10010=='-= 时,系统响应?=c(t) 解 1) ) 1s 41)(1s (1) s 21 ()4s )(1s (2)2(s )s (R )s (C )s (G +++= +++==∴ ① 2)由①式,增益K=1 3)由①式:特征根 4121?? ?-=-=λλ模态 4 e e t t ?????-- 4)零极点图见右 5)[] G(s)L k(t)1-= 6)4 54 241222+++=+++== s s s ))(s (s )(s R(s)C(s)G(s) -隐含零初始条件 r(t)(t)r c(t)(t)c (t)c 4245:L 1+=++-&&&& -不受零初始条件限制 7)对上式进行拉氏变换,注意代上初条件 例2 系统如右图所示 已知(s)G 0方框对应的微分方程为 求系统的传递函数 (s) U (s) U r c 解:对(s)G 0相应的微分方程进行拉氏变换 1 100000+= = ∴=+s T K (s)U (s)U (s)G (s) U K (s))U s (T a c a c ① 又由运算放大器特性,有0000≈≈ ,i u RsC .R R )sC (R R sC R. (s)U (s)U (s)U c r a 1 111 00 +-=+-= +∴ ② ①×②有 4.典型元部件的传递函数 1. 电位器(无负载时) 2. 电桥式误差角(位置)检测器 3. 自整角机 注 自整角机与电桥式误差检测器功能相同,只是有以下几点区别 1) 前者工作于交流状态,后者直流 2) 自整角机无摩擦,精度高 3) 自整角机21,θθ可以大于?360 4. 测速发电机 1)直流测速发电机 t t k Ω(s) U(s) G(s).ω k u ==∴=——楞次定律 2)交流发电机 5. 电枢控制式直流电动机(结构同发电机) 楞次定律:.ωk E b b = 克希霍夫:b a E Ri u += 安培定律:.i c M m m = 牛顿定律:θ ω.ω f M dt d ωJ m m m &=-= 利用前四个方程中的三个消去中间变量m b ,i,M E 得出: [] .c k Rf R J T m b m m m += 时间常数 []m b m m m .c k Rf c K += 传递系数 ??? ??????????? = +==+=∴(s)U Θ(s))s s(T K (s) G (s)U Ω(s)s T K (s) G a m m a m m 1121同一系统输入输出量选择不同有不同形式的传递函数 若分别对每一个方程分别求传递函数,则可构成以下结构图: ——分析问题的角度不同,同一系统可以有不同形式的结构图,但彼此等价。此图清楚的表明了电动机内部各变量间的传递关系,经简化后可得上面形式结构图 6. 两相交流伺服电动机 堵转力矩:a m s .u c M = 机械特性:.ωc M M ωs m -= 牛顿定律:.ωf ω J M m m m +=& 利用前两式消去s m M M ,可得: 分别各式进行拉氏变换得:方框图 7. 齿轮系:传动比12 1 12>== ωωz z i 负载轴上的粘滞阻尼,惯量向电机轴上的折算: 对于电机轴: 11111ωf M M ωJ m --=& 1M 为负载轴转矩 ⑴ 对于负载轴:22222ωf M ωJ -=& ⑵ 在啮合点:21F F = 又有: 1 2 1221 i z z r r ωω=== (4) 利用4式中的3个,消去中间变量之间关系得出1m 221~M ,,M ,M ωω: 一般地,有多级齿轮转动时: 可见:由于一般减速器总有 11 <=+i z z i i ∴越靠近电机轴的惯量、粘滞摩擦,对电机轴的影响越大, 远离电机轴的负载影响则较小 若一级减速比1i 很大,则负载轴的影响可以忽略不计 8. 调制器,解调器用于 1) 交、直流元件协调工作时 2) 交流元件,但工作频率不同时 ?? ?否则干扰较大交流元件有时要屏蔽, 漂移,工作点不易隔离,易点,都要用直流工作时交直流的元件各有其优 调制:把直流或低频信号驮在交流元件的工作频率上的过程 解调:把驮在交流元件频率上的有用低频(或直流)信号取出来的过程 一般不考虑调制、解调器的动态过程,认为其传函为1 5.典型环节 依上讨论可见:输入输出信号选择不同,同一元部件可以有不同的传递函数。不同的元部件可以有相同形式的传递函数 1. 环节——把传函形式相同的元部件归并在一起的分类——具有抽象性,概括性。如, 电位器,自整角机,测速发电机等等。同属比例环节。 2. 典型环节及其传递函数 阻尼系统 4 积分环节 减速器)(c r θω→ 5 微分环节 测速发电机)(c r u →θ 6 一阶复合微分环节 7 二阶复合微分环节 注: 1) 环节与部件并非一一对应,有时一个环节可代表几个部件,有时一个部件可表 成几个环节 2) 任一个系统的传递,可以视为典型环节的组合 如:) τξs s )(τs(Ts ) K(s G(s)12122 2++++= 6.负载效应问题:传递函数要在系统正常工作,考虑负载影响条件下推导出来 例如①右电网络,当两级相联时: 用算子法: 1 1 )()1(12221112212121221222121221211s C R s C R s C R s C C R R s C s C s C C R s C R R s)C s C s C C (R U U .U U U U r c r c ++++= ++++++= = (1)