现代控制理论讲稿01
现代控制理论第一章答案1
习题解答 2-1 2-2 2-3 2-4 2-5 2-6 2-7 2-8 2-9 2-10 2-11 2-12 2-13 2-14 2-15 2-16 2-17 2-18
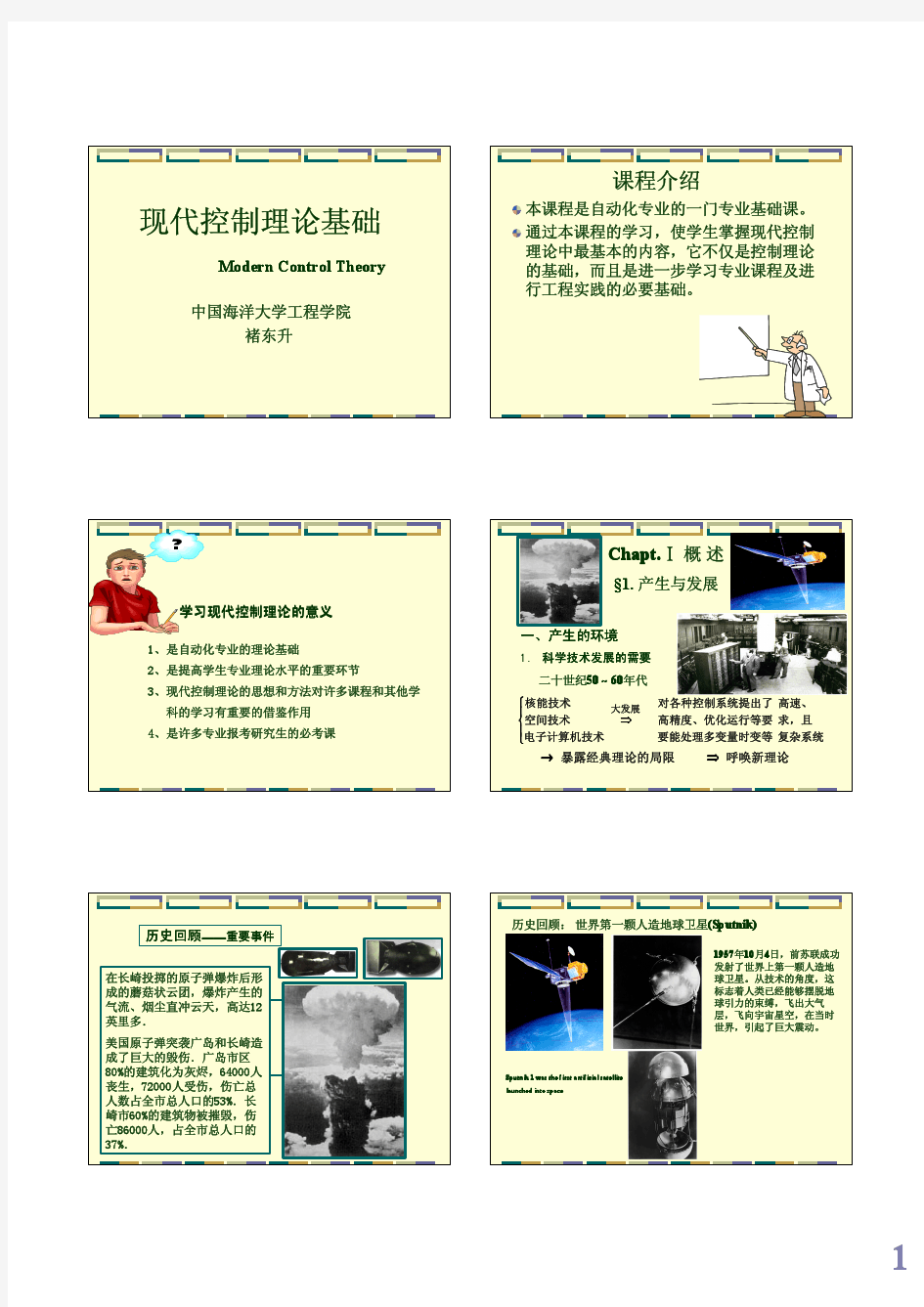
2-1 如题图2-1所示为RLC 电路网络,其中()i U t 为输入电压,安培表的指示电流)(t i o 为输出 量。试列写状态空间模型。 题图2-1 解: (1) 根据回路电压和节点电流关系,列出各电压和电流所满足的关系式. ()()() 1 ()()()()() i L C L C R C C d U t L i t U t dt d i t i t i t C U t U t dt R =+=+=+ (2) 在这个电路中,只要给定了储能R 元件电感L 和电容C 上的i L 和U C 的初始值,以及t ≥t 0 时刻后的输入量U i (t ),则电路中各部分的电压、电流在t ≥t 0时刻以后的值就完全确定了。也就是说,i L 和U C 可构成完整的描述系统行为的一组最少个数的变量组,因此可选i L 和为U C 状态变量,即 x 1(t )=i L , x 2(t )=u C (3) 将状态变量代入电压电流的关系式,有 1221211 11 i dx x U dt L L dx x x dt C RC =-+=- 经整理可得如下描述系统动态特性的一阶矩阵微分方程组--状态方程 11i 22110110x x L U L x x C RC ??-??????????=+???? ???? -???????????? (4) 列写描述输出变量与状态变量之间关系的输出方程, 1221110C x y U x x R R R ????===?? ?????? (5) 将上述状态方程和输出方程列写在一起,即为描述系统的状态空间模型的状态空间表达 式 11i 221211011010 x x L U L x x C RC x y x R ??-?????????? =+????????-? ??????????? ??? ?=????? ???
现代控制理论课后习题答案
绪论 为了帮助大家在期末复习中能更全面地掌握书中知识点,并且在以后参加考研考博考试直到工作中,为大家提供一个理论参考依据,我们11级自动化二班的同学们在王整风教授的带领下合力编写了这本《现代控制理论习题集》(刘豹第三版),希望大家好好利用这本辅助工具。 根据老师要求,本次任务分组化,责任到个人。我们班整体分为五大组,每组负责整理一章习题,每个人的任务由组长具体分配,一个人大概分1~2道题,每个人任务虽然不算多,但也给同学们提出了要求:1.写清题号,抄题,画图(用CAD或word画)。2.题解详略得当,老师要求的步骤必须写上。3.遇到一题多解,要尽量写出多种方法。 本习题集贯穿全书,为大家展示了控制理论的基础、性质和控制一个动态系统的四个基本步骤,即建模、系统辨识、信号处理、综合控制输入。我们紧贴原课本,强调运用统一、联系的方法分析处理每一道题,将各章节的知识点都有机地整合在一起,力争做到了对控制理论概念阐述明确,给每道题的解析赋予了较强的物理概念及工程背景。在课后题中出现的本章节重难点部分,我们加上了必要的文字和图例说明,让读者感觉每一题都思路清晰,简单明了,由于我们给习题配以多种解法,更有助于发散大家的思维,做到举一反三!
这本书是由11级自动化二班《现代控制理论》授课老师王整风教授全程监管,魏琳琳同学负责分组和发布任务书,由五个小组组组长李卓钰、程俊辉、林玉松、王亚楠、张宝峰负责自己章节的初步审核,然后汇总到胡玉皓同学那里,并由他做最后的总审核工作,绪论是段培龙同学和付博同学共同编写的。 本书耗时两周,在同学的共同努力下完成,是二班大家庭里又一份智慧和努力的结晶,望大家能够合理使用,如发现错误请及时通知,欢迎大家的批评指正! 2014年6月2日
《自动控制理论》讲稿(完整版)
《自动控制理论》讲稿
自动控制原理是自动化类专业基础课,是自动控制技术的基础,是研究自动控制共同规律的技术科学。 自动控制理论可分为自动控制原理(经典控制理论)和现代控制理论。开始主要用于研究工程技术领域的自动控制问题,现已将其应用范围扩展工程领域,如应用到经济学、生物医学、社会学、生产管理等领域。自动控制理论已成为普遍使用的基础理论。 我们本学期介绍的自动控制原理是自动控制技术基础的基础,计划授课85学时,其中10学时用于实验。 参考书: 《自动控制原理》,天大、技师、理工合编,天津大学出版社; 《自动控理论》,两航一校合编,国防工业出版社; 《现代控制工程》,(日),绪方胜彦,科出版社; 《自动控制系统》,(美),本杰明,水利电力出版社; 《线性系统理论》 《反馈控制理论》 自动控制理论:经典控制理论(自控原理) 现代控制理论 自动控制理论的划分是以控制理论发展的不同阶段人为归纳为: 建立在时域法、频率法和根轨迹法基础上的经典控制理论和建立在状态空间法基础上的现代控制理论。 经典控制理论:主要研究单输入、单输出(SISO)线性定常系统的分析和设计问题。其基本方法是采用描述输入-输出关系的传递函数为基础,包括:时域法、频域法、根轨迹法、相平面法等,工具:乃氏曲线,伯德图,尼氏图,根轨迹等曲线。现代控制理论:主要研究具有多输入-多输出系统(MIMO)、变参数系统的分析和设计问题。基本方法是:采用描述系统内部特征的状态空间的方法,更多的采用计算机作为其工具。 自动控制原理包括下列内容: 第一章:控制理论的基本概念,开、闭环,分类 第二章:数学模型即:描述系统运动状态的数学表达式——微分方程、传递函数、结构图信、号流程图第三章时域分析法:动态性能、静态性能、一二阶系统分析 第四章根轨迹分析法:常规根轨迹、特殊根轨迹 第五章频域分析法:频率特性、频域指标、频域分析 第六章系统综合与校正 第七章非线性系统与分析 第八章采样控制系 学习要求: 1.掌握自动控制系统的一般概念及其组成与分类; 2.掌握控制系统的基本性能要求。 教学内容: §1-1 概述 §1-2 自动控制的基本方式 §1-3 自动控制系统的类型 §1-4 本章小结 §1-5 思考题与习题
控制理论与控制工程专业解析
控制理论与控制工程专业解析 一、专业介绍 控制理论与控制工程隶属于控制科学与工程一级学科 1、研究方向 目前,各大院校与控制理论与控制工程专业相关的研究方向都略有不同的侧重点。以哈尔滨工程大学为例,该学科当前的主要研究方向: 01先进控制理论及应用 02船舶运动控制 03船海工程动力定位 04机器人与智能控制 05自主水下航行器控制 06核动力工程与控制 2、培养目标 控制理论与控制工程专业的硕士学位获得者必须掌握控制科学与工程学科的坚实的基础理论和系统的专业知识,了解自动控制领域的最新发展动向,能创造性地研究和解决与本学科有关的理论和实际问题,具有一定的独立从事科学研究和管理工作的能力,至少掌握一门外国语,能熟练地阅读专业文献资料,并具有一定的外语写作能力和进行国际学术交流的能力。 3、专业特色 本专业最突出的特点是控制理论与工程实际的紧密结合,培养的研究生既具有较高的控制理论水平,又具有很强的工程综合和计算机应用能力。学科以工程领域内的控制系统为主要研究对象,采用现代数学方法和计算机技术、电子与通讯技术、测量技术等,研究系统的建模、分析、控制、设计和实现的理论、方法和技术。 4、考试科目 ①101思想政治理论 ②201英语一、202俄语、203日语任选其一 ③301数学一 ④809自动控制原理 (注:以上以哈尔滨工程大学为例,各院校在考试科目中有所不同) 二、推荐院校 控制理论与控制工程硕士全国招生较强的单位有清华大学、浙江大学、上海交通大学、东北大学、东南大学、北京理工大学、西北工业大学、南京理工大学、哈尔滨工业大学、北京航空航天大学、华南理工大学、华东理工大学、哈尔滨工程大学、中南大学、西安交通大学、燕山大学、大连理工大学、上海大学、广东工业大学、山东大学、中国科学技术大学、吉林大学、大连海事大学、同济大学、北京科技大学、湖南大学、郑州大学、天津大学、重庆大学、浙江工业大学、南开大学、北京大学 三、就业方向 本专业培养的研究生可胜任本专业或相邻专业的教学、科研以及相关的技术、管理及研究工作。有些方向的毕业生在西门子、霍尼韦尔、和利时等自动化企业工作。控制理论与控制工程是个典型的工科专业,对动手能力的要求很高,毕业后从事科研技术工作的人员很多。
《现代控制理论》刘豹著(第3版)课后习题答案
《现代控制理论》刘豹著(第3版)课后习题答案 《现代控制理论》刘豹著(第3版)课后习题答案第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。 解:系统的模拟结构图如下: 系统的状态方程如下: 令,则所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。以电压为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻上的电压作为输出量的输出方程。 解:由图,令,输出量有电路原理可知: 既得写成矢量矩阵形式为: 1-3 参考例子1-3. 1-4 两输入,,两输出,的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。 解:系统的状态空间表达式如下所示: 1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。 解:令,则有相应的模拟结构图如下: 1-6 已知系统传递函数,试求出系统的约旦标准型的实现,
并画出相应的模拟结构图解: 1-7 给定下列状态空间表达式‘画出其模拟结构图求系统的传递函数解: 1-8 求下列矩阵的特征矢量解:A的特征方程解之得: 当时,解得: 令得当时,解得: 令得当时,解得: 令得1-9将下列状态空间表达式化成约旦标准型解:A的特征方程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10 已知两系统的传递函数分别为W1(s)和W2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:串联联结并联联结1-11 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解: 1-11 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解: 1-12 已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为解法1: 解法2: 求T,使得得所以所以,状态空间表达式为
控制科学与工程专业介绍
控制科学与工程专业介绍 控制科学与工程是一门研究控制的理论、方法、技术及其工程应用的学科。它是20世纪最重要的科学理论和成就之一,它的各阶段的理论发展及技术进步都与生产和社会实践需求密切相关。11世纪我国北宋时代发明的水运仪象台就体现了闭环控制的思想。到18世纪,近代工业采用了蒸汽机调速器。但直到20世纪20年代逐步建立了以频域法为主的经典控制理论并在工业中获得成功应用,才开始形成一门新兴的学科——控制科学与工程。此后,经典控制理论继续发展并在工业中获得了广泛的应用。在空间技术发展的推动下,50年代又出现了以状态空间法为主的现代控制理论,并相继发展了若干相对独立的学科分支,使本学科的理论和研究方法更加丰富。60年代以来,随着计算机技术的发展,许多新方法和技术进入工程化、产品化阶段,显著加快了工业技术更新的步伐。在控制科学发展的过程中,模式识别和人工智能与控制相结合的研究变得更加活跃;由于对大系统的研究和控制学科向社会、经济系统的渗透,形成了系统工程学科。特别是近20年来,非线性及具有不确定性的复杂系统向“控制科学与工程”提出了新的挑战,进一步促进了本学科的迅速发展。目前,本学科的应用已经遍及工业、农业。交通、环境、军事、生物、医学、经济、金融、人口和社会各个领域,从日常生活到社会经济无不体现本学科的作用。 控制科学以控制论、信息论、系统论为基础,研究各领域内独立
于具体对象的共性问题,即为了实现某些目标,应该如何描述与分析对象与环境信息,采取何种控制与决策行为。它对于各具体应用领域具有一般方法论的意义,而与各领域具体问题的结合,又形成了控制工程丰富多样的内容。本学科的这一特点,使它对相关学科的发展起到了有力的推动作用,并在学科交叉与渗透中表现出突出的活力。例如:它与信息科学和计算机科学的结合开拓了知识工程和智能机器人领域。与社会学、经济学的结合使研究的对象进入到社会系统和经济系统的范畴中。与生物学、医学的结合更有力地推动了生物控制论的发展。同时,相邻学科如计算机、通信、微电子学和认知科学的发展也促进了控制科学与工程的新发展,使本学科所涉及的研究领域不断扩大。 本学科下设五个二级学科:控制理论与控制工程,检测技术与自动化装置,系统工程,模式识别与智能系统,导航、制导与控制。各二级学科的主要研究范畴及相互联系如下。 “控制理论与控制工程”学科以工程领域内的控制系统为主要对象,以数学方法和计算机技术为主要工具,研究各种控制策略及控制系统的建模、分析、综合、设计和实现的理论、技术和方法。 “检测技术与自动化装置”是研究被控对象的信息提取、转换、传递与处理的理论、方法和技术的一门学科。它的理论基础涉及现代物理、控制理论、电子学、计算机科学和计量科学等,主要研究领域包括新的检测理论和方法,新型传感器,自动化仪表和自动检测系统,以及它们的集成化、智能化和可靠性技术。
22《自动控制理论》(现控部分)考试试题ABC卷(2008级自动化)
2009级自动化《现代控制理论》考试知识点 1、给出一个动态结构图,求状态空间表达式并画出状态变量图(模拟结构图)。 2、给出2个状态空间表达式,求两者串联后的状态空间表达式。 3、对于齐次状态方程,给出两个初始时刻的解,求状态转移矩阵和系统矩阵。 4、给出状态空间表达式,对其近似离散化并分析前后的能控性。 5、给出1个微分方程,求其能控标准Ⅰ型和能观标准Ⅱ型状态空间表达式。 6、确定一个非线性系统是否大范围渐近稳定。 2008级自动化《现代控制理论》考试试题 A 卷1、试求图示系统的状态空间表达式。 (7分 ) 2、已知 ,求系统矩阵A 。,,求系统矩阵A 。 (6分) 3、判定系统21011x ?? =??--?? x x 平衡状态是否大范围渐近稳定。 (7分) 4、试对系统1001 11[0 1]u y ????=? ???????= x x +x , ①判定状态的能控性和能观性。(4分) ②设计状态反馈控制器使其闭环极点为-1+j ,-1-j 。(6分) (共10分) B 卷1、试求方程为 ,系统的状态空间表达式。 (7分) 2、已知 ,求系统矩阵A 。(6分) 3、试求系统112122 2 11212x x x x x x x x x =--+??=-+-? 的平衡状态并分析其稳定性。 (7分) 112221y y y u u y y y u ++=+??++=? 22222322()222354t t t t t t t t t t t te e te e e Φt te e e te e e ?? -++-=?? --++-?? ()cost sint Φt -sint cost ??=????
现代控制理论第3版刘豹课后习题答案完整免费
《现代控制理论参考答案》第三版 第一章答案 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。 图1-27系统方块结构图 解:系统的模拟结构图如下: 图1-30双输入--双输出系统模拟结构图 系统的状态方程如下:
u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x p p p p n p b 161116613153 461 514131 3322211 +-- =+-==++- - == =?? ? ?? ? 令y s =)(θ,则1x y = 所以,系统的状态空间表达式及输出方程表达式为 []????? ? ??? ? ??????????=??????? ???????????????+?????? ?????????????????????????? ?? ??????????? ?-----=????????????????????????????? ?654321165432111111112654321000001000000 000000010010000000000010x x x x x x y u K K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p p p n p b 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。 U 图1-28 电路图
解:由图,令32211,,x u x i x i c ===,输出量22x R y = 有电路原理可知:? ? ? +==+=++3 213 222231111x C x x x x R x L u x x L x R 既得 2 221332 2222131111111111x R y x C x C x x L x L R x u L x L x L R x =+- =+-=+-- =? ? ? 写成矢量矩阵形式为: []???? ? ?????=?? ?? ? ? ????????+?????????????????? ? ?? ???????--- -=??????????????3212 13212 22 111 321000*********x x x R y u L x x x C C L L R L L R x x x 。。 。 1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。 1 u 2 u 图1-30双输入--双输出系统模拟结构图 解:系统的状态空间表达式如下所示: []??? ? ? ???????=????? ???????+????????????????????????------=????????????432121432134 5 61 243 210101000000 100100010x x x x y u b b x x x x a a a a a a x x x x &&&&
现代控制理论第3章答案
第三章习题 3-1判断下列系统的状态能控性和能观测性。系统中a,b,c,d 的取值对能控性和能观性是否有关,若有关,其取值条件如何? (1)系统如图3.16所示: 图3.16 系统模拟结构图 解:由图可得: 3 43432112332 211x y dx x x cx x x x x cx x bx x u ax x =-=-+=++-=-=+-=???? 状态空间表达式为: []x y u x x x x d c b a x x x x 01 000001100 011000000 43214321=? ???????????+????????????????????????----=??????? ? ??????????? ? 由于? 2x 、?3x 、? 4x 与u 无关,因而状态不能完全能控,为不能控系统。由于y 只与3x 有关,因而系统为不完全能观的,为不能观系统。 (3)系统如下式:
x d c y u b a x x x x x x ?? ????=??????????+????????????????? ???---=?????? ?????????? ?00000012200010011321321 解:如状态方程与输出方程所示,A 为约旦标准形。要使系统能控,控制矩阵b 中相对于约旦块的最后一行元素不能为0,故有0,0≠≠b a 。 要使系统能观,则C 中对应于约旦块的第一列元素不全为0,故有0,0≠≠d c 。 3-2时不变系统 X y u X X ?? ????-=?? ? ???+??????--=? 111111113113 试用两种方法判别其能控性和能观性。 解:方法一: []?? ?? ??==?? ????-=????? ?=??????--=2-2-1 12-2-1 1AB B M 1111,1111,3113C B A 系统不能控。 ,21<=rankM ??? ? ? ???????----= ??????=44221111CA C N 系统能观。,2=rankN 方法二:将系统化为约旦标准形。 ()4 20133113 A I 212 -=-==-+=+--+= -λλλλλλ,
现代控制理论Matlab仿真
基于Matlab的GUI仿真设计 开发说明文档 学院:信息科学与工程学院 班级:自动化1001 学号:20100413 姓名: 指导教师:赵明旺 二○一三年五月
一、设计题目 设有一个弹簧-质量-阻尼器系统,安装在一个不计质量的小车上,如题图所示。u 和 y为分别为小车和质量体的位移,k、b 和 m 分别为弹簧弹性系数、阻尼器阻尼系数和质量体质量阻尼器。试建立 u 为输入,y 为输出的状态空间模型。 二、设计目的 通过Matlab的GUI界面设计,达到现代控制理论课程的学习要求,学会建立一个系统的状态空间模型,能对线性系统进行时域分析,理解能控性、能观性及李亚普洛夫稳定性的定义,设计极点配置控制系统等. 三、设计要求 使用Matlab数学工具,运用现代控制理论中的知识对一个实际的弹簧-质量-阻尼器系统进行仿真,制作出一个GUI界面,可以动态的观察质量体变化并画出波形。能控性、能观性、李亚普洛夫稳定性的判定,并配置极点构成一个闭环系统。 四、设计内容 1、菜单栏: 开始仿真(动态波形 + 动态系统) 复位(所有参数和图形全部初始化) 退出(退出GUI界面) 2、任务栏:
建模: 状态空间模型建立;传递函数模型建立 系统分析: 系统状态和输出响应计算及输出;能控性判定; 能观性判定;李雅普洛夫稳定性判定 系统综合: 极点配置控制系统设计;状态观测器设计(选作);带状态观测器的极点配置控制系统(选作) 3、系统模型参数: k:弹簧弹性系数 b: 阻尼器阻尼系数 m: 质量体质量 4、系统输出参数: 输出变量: 质量体位移y + 状态变量(x1 & x2) 输出形式: 图形 + 数据 输出数据包括: 状态空间模型\传递函数模型\系统分析结论\状态反馈律\状态观测器\闭环系统模型等 5、仿真参数: 仿真时间:设置仿真时间 仿真步长:设置仿真步长 图形输出刷新时间速率: 设置图形输出刷新时间步长(如0.3秒) 6、系统输入参数: 输入信号:零输入响应 + 阶跃响应+ 任意输入信号(即任意输入表达式来表示输入任意信号,变量为t) 初始状态:系统初始状态 系统期望极点:一般配置在虚轴左边,此时闭环系统稳定 五、仿真系统介绍(含界面解图)
现代控制理论知识点汇总
第一章 控制系统的状态空间表达式 1.状态空间表达式 n 阶 Du Cx y Bu Ax x +=+= 1:?r u 1:?m y n n A ?: r n B ?: n m C ?:r m D ?: A 称为系统矩阵,描述系统内部状态之间的联系;B为输入(或控制)矩阵,表示输入对每个状态变量的作用情 况;C 输出矩阵,表示输出与每个状态变量间的组成关系,D直接传递矩阵,表示输入对输出的直接传递关系。 2.状态空间描述的特点 ①考虑了“输入-状态-输出”这一过程,它揭示了问题的本质,即输入引起了状态的变化,而状态决定了输出。 ②状态方程和输出方程都是运动方程。 ③状态变量个数等于系统包含的独立贮能元件的个数,n 阶系统有n 个状态变量可以选择。 ④状态变量的选择不唯一。 ⑤从便于控制系统的构成来说,把状态变量选为可测量或可观察的量更为合适。 ⑥建立状态空间描述的步骤:a 选择状态变量;b 列写微分方程并化为状态变量的一阶微分方程组;c 将一阶微分方程组化为向量矩阵形式,即为状态空间描述。 ⑦状态空间分析法是时域内的一种矩阵运算方法,特别适合于用计算机计算。 3.模拟结构图(积分器 加法器 比例器) 已知状态空间描述,绘制模拟结构图的步骤:积分器的数目应等于状态变量数,将他们画在适当的位置,每个积分器的输出表示相应的某个状态变量,然后根据状态空间表达式画出相应的加法器和比例器,最后用箭头将这些元件连接起来。 4.状态空间表达式的建立 ① 由系统框图建立状态空间表达式:a 将各个环节(放大、积分、惯性等)变成相应的模拟结构图;b 每个积 分器的输出选作i x ,输入则为i x ;c 由模拟图写出状态方程和输出方程。 ② 由系统的机理出发建立状态空间表达式:如电路系统。通常选电容上的电压和电感上的电流作为状态变量。 利用KVL 和KCL 列微分方程,整理。 ③由描述系统的输入输出动态方程式(微分方程)或传递函数,建立系统的状态空间表达式,即实现问题。实现是非唯一的。 方法:微分方程→系统函数→模拟结构图→状态空间表达式。熟练使用梅森公式。 注意:a 如果系统函数分子幂次等于分母幂次,首先化成真分式形式,然后再继续其他工作。 b 模拟结构图的等效。如前馈点等效移到综合反馈点之前。p28 c 对多输入多输出微分方程的实现,也可以先画出模拟结构图。 5.状态矢量的线性变换。也说明了状态空间表达的非唯一性。不改变系统的特征值。特征多项式的系数也是系统的不变量。 特征矢量i p 的求解:也就是求0)(=-x A I i λ的非零解。 状态空间表达式变换为约旦标准型(A为任意矩阵):主要是要先求出变换矩阵。a 互异根时,各特征矢量按列排。b 有重根时,设3阶系统,1λ=2λ,3λ为单根,对特征矢量1p ,3p 求法与前面相同, 2p 称作1λ的广义特征矢量,应满足121)(p p A I -=-λ。 系统的并联实现:特征根互异;有重根。方法:系统函数→部分分式展开→模拟结构图→状态空间表达式。 6.由状态空间表达式求传递函数阵)(s W D B A sI C s W ++-=-1)()( r m ?的矩阵函数[ij W ] ij W 表示第j 个输入对第i 个输出的传递关系。 状态空间表达式不唯一,但系统的传递函数阵)(s W 是不变的。
现代控制理论第三章
2.6 可控性与可观性 26 2.6.1 概述 经典控 制论中: 系统用传递函数描述。 只注重输入-输出间的直接关系! 低阶系统,输出可控制亦可测量。 可控性与可观性不是问题。
现代控制论中: 系统描述:状态方程+输出方程 由于状态?输入,输出?状态 所以要控制输出,首先要控制状态 并且使输出随状态发生变化输 (1)输入?状态间的问题: 输入是否使状态发生希望的变化? ? 可控性问题 要使状态发生某种变化,输入? 要使状态发生某种变化,输入=? ? 最优控制问题
(2)输出?状态间的问题: 状态可否从输出得到? ? 可观测性问题 如何从输出得到? ? 最优估计问题 &可控性、可观性为现代控制理论的基础,例如最优控制与最优估计的基础! &如何处理可控性?可观测性?
可控性:系统输入对系统状态的有效控制能力 可观性:系统输出对系统状态的确切反映能力 问题: 状态可控?系统可控? 状态不可控?系统不可控? 状态可观测系统可测观 状态可观测?系统可测观? 状态不可观测?系统不可观测?
个系统的可控性和可观测性 ?分析如下4个系统的可控性和可观测性:x x 111001/????+??????=u dt d []x 11=???y x x 101/????+???????=u dt d x x 001/??+???=u dt d []x 01110=? ??y x 11110=?????????x x 0111/? ???+???=u dt d []y []x 0110=???????y
?x x 111001/????+??????=u dt d []x 11=? ??y x ∫ ?1 u y 1 2 x ∫ 1?
现代控制理论知识点归纳
第一章 1、输入-输出描述:通过建立系统输入输出间的数学关系来描述系统特性。含:传递函数、微分方程( 2、状态空间描述通过建立状态(能够完善描述系统行为的内部变量)和系统输入输出间的数学关系来描述系统行为。 3、limg ij (s)=c,真有理分式c ≠0的常数,严格真有理分式c=0,非真有理分式c=∞ 4、输入输出描述局限性:a 、非零初始条件无法使用,b 、不能揭示全部内部行为。 5、状态变量的选取:a 、n 个线性无关的量,b 、不唯一,c 、输出量可作状态变量,d 、输入量不允许做状态变量,e 、有时不可测量,f 、必须是时间域的。 6、求状态空间描述的传递函数矩阵:G(s)=C(sI-A)-1B+D 7、输入-输出描述——>状态空间描述(中间变量法) 8、化对角规范形的条件:系统矩阵A 的n 个特征值λ1,λ2,…, λn 两两互异,或当系统矩阵A 的n 个特征向量线性无关。 9、*x =Ax+Bu * x =A x +B u A =P -1AP B =P -1B *x =P -1* x x =P -1x u =u 10、代数重数σi :同为λi 的特征值的个数,也为所有属于 λi 的约当小块的阶数之和。几何重数αi :λi 对应的约当小块个数,也是λi 对应线性相关特征向量个数。 11、组合系统状态空间描述: a 、并联:]*1111*222211212200[]x x B A u A x B x x y C C D D u x ????????????=+????????????????????????=++??????? ,1()()N i i G s G s ==∑ b 、串联:]()*1111*221221212122120x A x B u A B C x B D x x y D C C D D u x ????????????=+????????????????????????=+??????? ,11()()()...()N N G s G s G s G s -= c 、反馈:1121()()[()()]G s G s I G s G s -=+ 第二章 1、求e At :a 、化对角线线规范形法,b 、拉普拉斯法 2、由 *x =Ax+Bu y=Cx+Du 求 x(t)=e At x 0+∫e A(t- τ)Bu(τ) d τ,(t ≥0) 第三章 1、能控性:如果存在一个不受约束的控制作用u(t)在有限时间间隔t0-tf 内,能使系统从任意初
(完整word版)《现代控制理论》第3版课后习题答案
《现代控制理论参考答案》 第一章答案 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。 图1-27系统方块结构图 解:系统的模拟结构图如下: 图1-30双输入--双输出系统模拟结构图 系统的状态方程如下:
u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x p p p p n p b 161116613153 461 514131 3322211 +-- =+-==++- - == =?? ? ?? ? 令y s =)(θ,则1x y = 所以,系统的状态空间表达式及输出方程表达式为 []????? ? ??? ? ??????????=??????? ???????????????+?????? ?????????????????????????? ?? ??????????? ?----- =????????????????????????????? ?65432116543211111111 2654321000001000000 00000001001000000 000001 0x x x x x x y u K K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p p p n p b 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。 U 图1-28 电路图
解:由图,令32211,,x u x i x i c ===,输出量22x R y = 有电路原理可知:? ? ? +==+=++3 213 222231111x C x x x x R x L u x x L x R 既得 2 221332 2222131111111111x R y x C x C x x L x L R x u L x L x L R x =+- =+-=+--=?? ? 写成矢量矩阵形式为: []???? ? ?????=?? ?? ? ? ????????+?????????????????? ? ?? ???????--- -=??????????????3212 13212 22 111 321000*********x x x R y u L x x x C C L L R L L R x x x 。。 。 1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。 1 u 2 u 图1-30双输入--双输出系统模拟结构图 解:系统的状态空间表达式如下所示: []??? ? ? ???????=????? ???????+????????????????????????------=????????????432121432134 5 61 243 210101000000 100100010x x x x y u b b x x x x a a a a a a x x x x &&&&
控制理论与控制工程简介
控制理论与控制工程 081101 学科专业简介 “控制理论与控制工程”专业前身为工业自动化专业,1997年按照国务院学位委员会和原国家教育委员会颁布的《授予博士、硕士学位和培养研究生的学科、专业目录》改为现名,是“控制科学和工程”所属的二级学科。该专业于1979年开始培养硕士研究生,1986年获得硕士学位授予权,1995年获得博士学位授予权,1997年设立“控制科学和工程”博士后流动站,2003年被教育部确定为“长江学者奖励计划”特聘教授设岗学科。 本学科是市教委的重点建设学科。目前已组成了一支以中青年高层次科技人员为主体的科研骨干队伍。截至2003年12月,该专业有长江学者特聘教授1名,教授19名、副教授5名。此外,本学科还聘任了包括四名科学院院士和一批国务院学科评审专家在的知名学者担任顾问和兼职教授。近5年来,该专业已培养了博士27名,硕士179名,出站博士后10名。该学科在相关研究领域承担了大量的国家科技攻关项目、"863"计划项目、国家自然基金项目以及其他类型的国家、部委、省市及企业科研项目,获得了一大批科研成果和国家或省部级科技进步奖,出版了一批有影响的著作和教材,发表了大量的高水平学术论文。其中,1995年以来,共取得了2项国家级获奖成果,23项省部级获奖成果,已完成和正在进行的国家自然科学基金及863项目有16项,在相关学术会议和专业学术刊物上发表论文500余篇,出版教材、译著和专著数十部。 一、培养目标 1、较好地掌握马克思主义基本原理、思想、理论和“三个代表”重要思想, 树立正确的世界观、人生现和价值观,坚持四项基本原则,热爱祖国, 遵纪守法,品德优良,乐于奉献,积极为社会主义现代化建设服务。 2、在本学科领域,较好地掌握坚实宽广的基础理论和系统深入的专门知
自动控制理论的哲学讲稿201434
自动控制理论的哲学讲稿(草稿) 宁永臣 2014.3.4 哲学是科学工作者对其思想意识进行有效操作的唯一工具。素质教育、创新人才培养的本质性基础之一是科学教育与人文教育的融合与统一,即一元化教育。由于近代工业革命的结果,两者的割裂(多元化教育)使得哲学或给力不够、或离我们渐行渐远,其对科学研究的指导作用(反思、批判、预见)也越来越小。一个科学工作者有了某种创新思想,却不懂得如何对其思想进行有效的、全方位的梳理和升华,一个科学工作者在取得了阶段性创新成果之后,却不懂得如何对其成果进行价值的总体判断和预见,在某种程度上,很难说不是我们至今都培养不出世界大师、诺贝尔奖获得者的重要原因之一。 因此,在授课过程中,对自动控制理论的内容、方法和意义进行适当的哲学分析,应成为本课程最为重要的核心内容之一。因为,既使抛开这一主动意义,自动控制理论本身也带有浓重的方法论色彩,有必要对此加以强调或突出。这种哲学分析为我们认识自动控制理论问题、解决自动控制理论问题提供了丰富的视角,是学习好、运用好自动控制理论的认识论基础与方法论基础。
一、自动控制理论的定性 自动控制理论的性质、研究的对象和任务 自动控制理论(原理)是一门关于自动控制规律的技术科学【性质】,它研究系统各组成部分之间的信息传递规律和控制规律【对象】。其任务是给定一个被控对象或过程后,按工程或其它需要给定一(组)性能指标要求,然后再依据实际上的限制与约束,设计控制器来控制这个被控对象或过程以满足性能指标要求。从理论上讲,自动控制理论(原理)要回答的问题正是针对上述要求下能不能做和怎样做两个问题【任务】。 二、自动控制理论所涉及的三对哲学范畴 1.作用与反作用(可解释反馈原理) 2.原因与结果(可解释反馈原理) 3.可能性与现实性(可解释能控性与能观测性) 三、控制科学中的反馈与哲学范畴中的反馈
控制科学与工程
控制科学与工程[自动化]招生单位专业课类比本表所统计专业课的仅是“0811 控制科学与工程”一级学科下属的几个专业(二级学科)。双控=控制理论与控制工程;检测=检测技术与自动化装置;系统=系统工程;模式=模式识别与智能系统;导航=导航、制导与控制;复试——指的是复试笔试科目。 此仅为部分重点院校或重点专业;部分学校的同一名称的专业分布在不同的学院,也一并列出。 北京工业大学 421自动控制原理 复试:1、电子技术2、计算机原理 北京航空航天大学 [双控] 432控制理论综合或433控制工程综合 [检测] 433控制工程综合或436检测技术综合 [系统] 431自动控制原理或451材料力学或841概率与数理统计 [模式] (自动化学院)433控制工程综合或436检测技术综合、(宇航学院)423信息类专业综合或431自动控制原理或461计算机专业综合 [导航] (自动化学院)432控制理论综合或433控制工程综合、(宇航学院)431自动控制原理 复试:无笔试。1) 外语口语与听力考核;2) 专业基础理论与知识考核;3) 大学阶段学习成绩、科研活动以及工作业绩考核;4) 综合素质与能力考核 北京化工大学 440电路原理 复试:综合1(含自动控制原理和过程控制系统及工程)、综合2(含自动检测技术装置和传感器原理及应用)、综合3(含信号与系统和数字信号处理) 注:数学可选择301数学一或666数学(单) 北京交通大学 [双控/检测]404控制理论 [模式]405通信系统原理或409数字信号处理 复试: [电子信息工程学院双控]常微分方程 [机械与电子控制工程学院检测]综合复试(单片机、自动控制原理) [计算机与信息技术学院模式] 信号与系统或操作系统 北京科技大学 415电路及数字电子技术(电路70%,数字电子技术30%) 复试: 1.数字信号处理 2.自动控制原理 3.自动检测技术三选一 北京理工大学 410自动控制理论或411电子技术(含模拟数字部分)
《现代控制理论》第3版课后习题答案
《现代控制理论参考答案》 第一章答案 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。 1 1K s K K p +s K s K p 1 +s J 11s K n 2 2s J K b - + + - +- ) (s θ)(s U 图1-27系统方块结构图 解:系统的模拟结构图如下: ) (s U ) (s θ-- - + ++图1-30双输入--双输出系统模拟结构图 1 K p K K 1p K K 1++ +p K n K ? ? ?1 1J ? 2 J K b ? ?- 1 x 2 x 3 x 4 x 5x 6x 系统的状态方程如下:
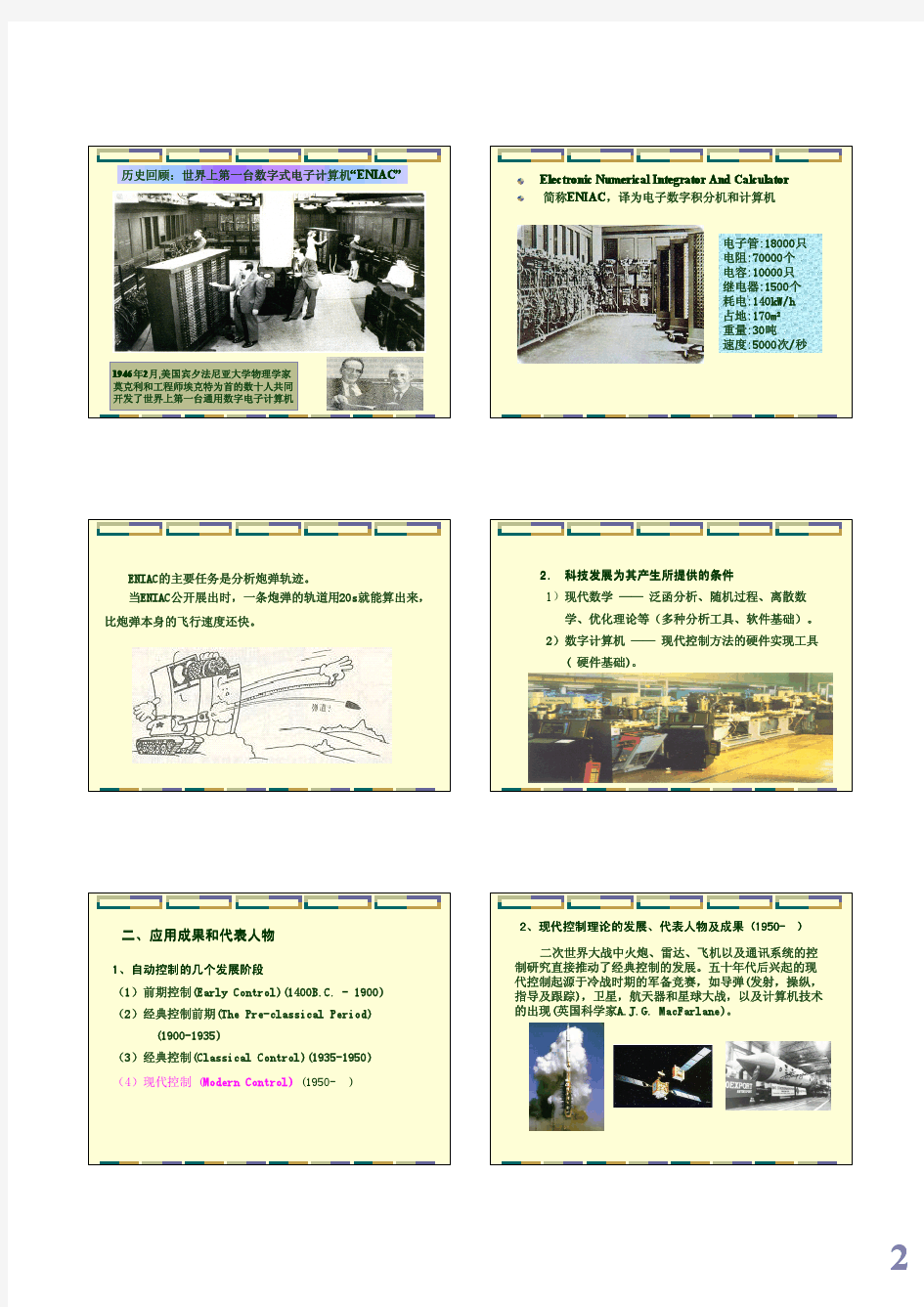
u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x p p p p n p b 1611166 13153 46 1 51 41 31 33 222 11+ - - =+-==+ + - - == =? ? ? ? ? ? 令y s =)(θ,则1x y = 所以,系统的状态空间表达式及输出方程表达式为 []????????? ???????????=??????? ? ?????????? ????+?? ???????? ?????????????????????? ? ??? ? ???????? ?---- -=??????????????????????????????6543211654321111111126543 2100 0001 000000 00 0000 0001 00100000 000 000 10 x x x x x x y u K K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p p p n p b 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。 R1 L1 R2 L2 C U ---------Uc --------- i1 i2图1-28 电路图
《现代控制理论基础》第3章
第一和第二讲小结 一、状态空间表达式的标准形式 能控标准形 能观测标准形 对角线标准形 Jordan标准形 二、矩阵的特征值及对角线化 矩阵是能控标准形时的变换矩阵求法(1)特征值互异 (2)重根 (3)一般情形 三、利用MATLAB进行系统模型之间的相互转换 [A, B, C, D] = tf2ss (num, den) [num,den] = ss2tf [A,B,C,D,iu] 四、时域分析的基本概念 状态转移矩阵及其性质,凯莱-哈密尔顿定理 最小多项式 五、矩阵指数计算 级数法,对角线标准形与Jordan标准形法 拉氏变换法凯莱-哈密尔顿定理
II、分析部分 第三章线性多变量系统的能控性与能观测性分析 能控性(controllability)和能观测性(observability)深刻地揭示了系统的内部结构关系,由R.E.Kalman于60年代初首先提出并研究的这两个重要概念,在现代控制理论的研究与实践中,具有极其重要的意义,事实上,能控性与能观测性通常决定了最优控制问题解的存在性。例如,在极点配置问题中,状态反馈的的存在性将由系统的能控性决定;在观测器设计和最优估计中,将涉及到系统的能观测性条件。 在本章中,我们的讨论将限于线性系统。将首先给出能控性与能观测性的定义,然后推导出判别系统能控和能观测性的若干判据。 3.1 线性连续系统的能控性 3.1.1 概述 能控性和能观测性就是研究系统这个“黑箱”的内部的状态是否可由输入影响和是否可由输出反映。 例1.给定系统的描述为
u x x x x ??????+????????????-=??????2150042121 []?? ? ???-=2160 x x y 将其表为标量方程组的形式,有: u x x +=114 u x x 2522+-= 26x y -= 例3-2:判断下列电路的能控和能观测性 ) (t u + y C R ) (t u L y 2