松下_AAD03011门机控制器使用手册hd

目录
1.注意事项 (2)
2.端子名称和线号 (2)
3.按键名称和基本操作 (2)
4.接线图 (3)
5.开关门曲线说明 (4)
6.基本调试1 (6)
7.基本调试2 (6)
8.功能参数表 (8)
9.监控和故障显示 (11)
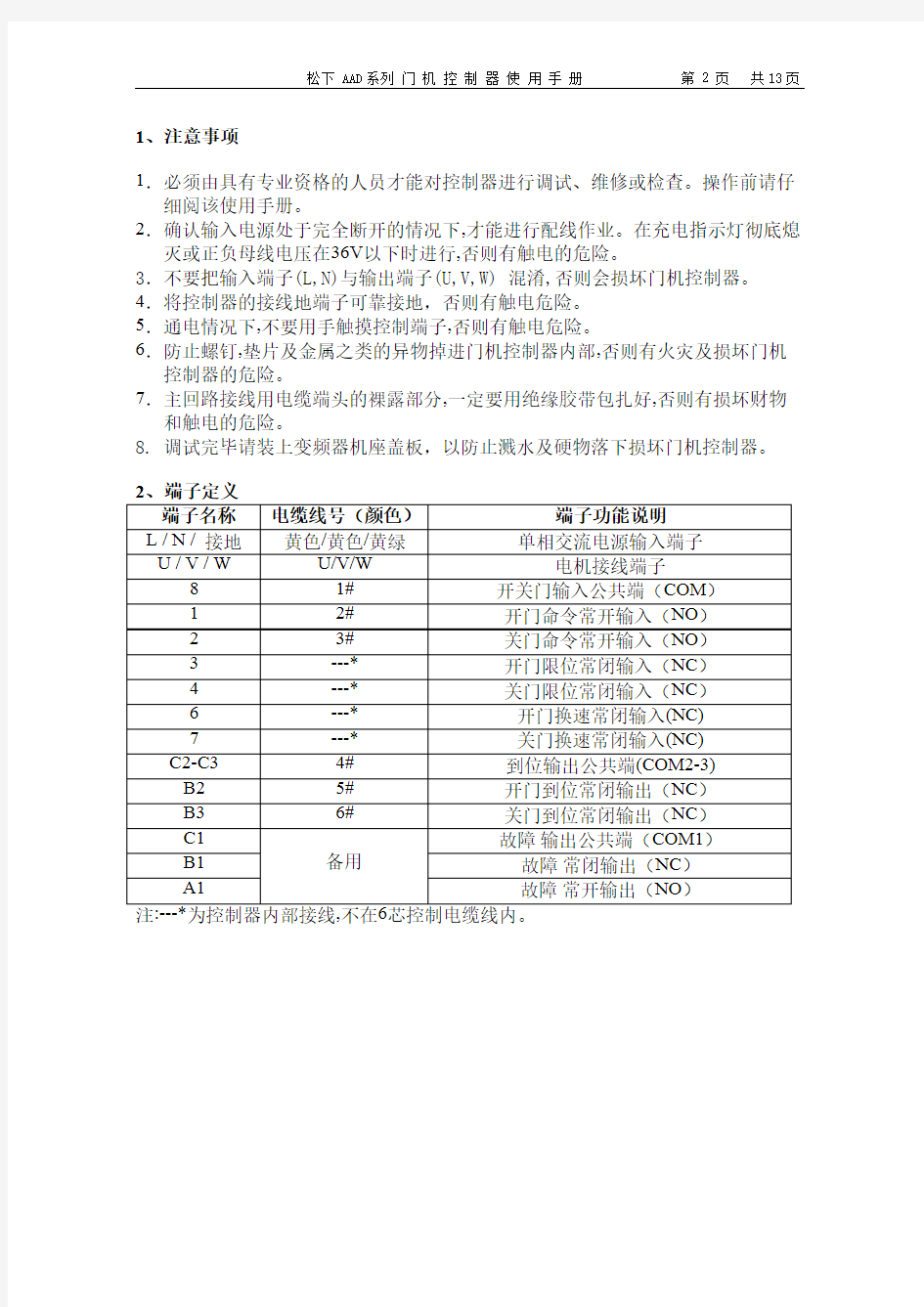
1、注意事项
1.必须由具有专业资格的人员才能对控制器进行调试、维修或检查。操作前请仔细阅该使用手册。
2.确认输入电源处于完全断开的情况下,才能进行配线作业。在充电指示灯彻底熄灭或正负母线电压在36V以下时进行,否则有触电的危险。
3.不要把输入端子(L,N)与输出端子(U,V,W)混淆,否则会损坏门机控制器。4.将控制器的接线地端子可靠接地,否则有触电危险。
5.通电情况下,不要用手触摸控制端子,否则有触电危险。
6.防止螺钉,垫片及金属之类的异物掉进门机控制器内部,否则有火灾及损坏门机控制器的危险。
7.主回路接线用电缆端头的裸露部分,一定要用绝缘胶带包扎好,否则有损坏财物和触电的危险。
8.调试完毕请装上变频器机座盖板,以防止溅水及硬物落下损坏门机控制器。2、端子定义
端子名称电缆线号(颜色)端子功能说明
L/N/接地黄色/黄色/黄绿单相交流电源输入端子
U/V/W U/V/W电机接线端子
81#开关门输入公共端(COM)
12#开门命令常开输入(NO)
23#关门命令常开输入(NO)
3---*开门限位常闭输入(NC)
4---*关门限位常闭输入(NC)
6---*开门换速常闭输入(NC)
7---*关门换速常闭输入(NC)
C2-C34#到位输出公共端(COM2-3)
B25#开门到位常闭输出(NC)
B36#关门到位常闭输出(NC)
C1
备用故障输出公共端(COM1)
B1故障常闭输出(NC)A1故障常开输出(NO)注:---*为控制器内部接线,不在6芯控制电缆线内。
3、按键名称和基本操作
3、1按键名称
键名功能说明
模式dr,fr,参数p和d,参数n的切换
选择数据监视模式和数据写入确认
数据或功能码的递增
数据或功能码的递减
面板控制下用于启动运行操作
面板操作方式下用于停机和复位操作
3、2按键基本操作
以改变参数P05为15为例:
按键次序显示内容
注意:在配接开关门到位输出电缆线时,要确认门控制器输出的逻辑状态与控制柜接收的逻辑相符,门控制器的出厂状态是常闭输出.用户要根据主控制柜实际情况选择到位输出的逻辑状态.(端子A2)--开到位常开输出,(端子A3)--关到位常开输出,(端子C2-C3)--输出公共端
5、1开门过程
1、以力矩提升为P05、加减速时间为d28,频率d15启动,再以加减速时间d29,目
标值为d16进入开门起始低速运行。
2、经过时间d47后,开始以加减速时间d30,目标值为d17进入开门高速运行。高速
段频率一般设置为一段即设置参数d17=d19。
3、当门运行到开门变速开关位置时,通过延时d48后,开始以加减速时间d33,目标
值为d20进入开门低速运行。
4、当门运行到开门到位开关位置时,门以保持频率d21,保持电流d40进入开门到位
力矩保持。
注意:
1、开门到位保持频率为d21,保持电流为d40。保持时间为d42,范围为0.1到
999(sec),当设置为0时,则长期保持。
2、高速段频率一般设置为一段即设置参数d17=d19,此时d17与19之间的加减
速d32将不起作用。
3、若低速段开门力矩较小,可以适当加大P05的值。注意:过大的P05值可能
会引起过流保护。
1、以力矩提升为P05、加减速时间为d34,频率d22启动,再以加减速时间d35,目
标值为d23进入关门起始低速运行。
2、经过时间d49后,开始以加减速时间d36,目标值为d24进入关门高速运行。高速
段频率一般设置为一段即设置参数d24=d26。
3、当门运行到关门变速开关位置时,通过延时d50后,开始以加减速时间d39,目标
值为d27进入关门低速运行。
4、当门运行到关门到位开关位置时,门以关到达保持待机频率d44保持短时待机时
间d46,再以保持频率d14,保持电流d41进入关门到位力矩保持。
注意:
1、关门到位保持频率为d14,保持电流为d41。保持时间为d42,范围为0.1到
999(sec),当设置为0时,则长期保持。
2、高速段频率一般设置为一段即设置参数d24=d26,此时d24与26之间的加减速d32将不起作用。
3、若低速段关门力矩较小,可以适当加大P05的值。注意:过大的P05值可能会
引起过流保护。
6、基本调试1
门机出厂前已经完成功能参数的设置。根据实际需要,用户可以对照开关门运行曲线图和对应的参数,调节开关门的运行曲线。
步骤:
1、设置控制方式为面板键盘方式:p08=1。
2、对照开关门运行曲线图和对应的参数,调节开关门运行曲线的参数。
3、按(RUN键,以下相同操作)查看开/关门的
运行曲线。
4、设置控制方式为端子控制方式:p08=2(出厂设置)。
注意:如果控制器在运行中,参数p08将不能被修改。请按“STOP”键后,再按切换“MODE”键到p参数栏进行参数p08的修改。
7、基本调试2
在更换电机、变速或到位开关的逻辑(NO/NC)请确认以下步骤:
7、1输入输出信号监控(参数n16、参数n17)的确认
参数n16为输入信号的监控包括:①~⑨。
参数n17为输出信号的监控包括:开限位输出、关限位输出、故障输出。
①-----开门指令信号/RY1输出信号
②-----关门指令信号/RY2输出信号
③-----开到达信号/RY3输出信号
④-----关到达信号
⑤-----光幕/触板信号
⑥-----开变速信号
⑦-----关变速信号注意:监视信号⑤、⑧、⑨出厂时
未定义,此处不予以监控
按n参数模式,键得到对应的监控参数
7、2输入端子的逻辑(NO/NC)设定的确认
输入信号逻辑设定参数---P43
1、设定值:0----信号端子与输入公共端闭合时,此时该信号有效(NO)。
1----信号端子与输入公共端断开时,此时该信号有效(NC)。
2、设定方法:0—15bit的10进制数输入
设定值?权=合计值(作为设定值)
例如:开变速输入信号、关变速输入信号、开到达输入信号、关到达输入信号设置为:NC;其他为:NO
则设定值=1?16+1?8+0?4+1?2+1?1=27
那么设置参数P43(输入信号逻辑设定)=27
信号名(不设定)开变速关变速光幕/触板开到位关到位
端子号------76543
权(BIT)5—1543210
设定值00/10/10/10/10/1
合计值0168421
7、3电机的正、反转的确认
条件:设定频率(Fr模式下)为3Hz左右。P09=0
键,确认开动作;
键,确认关动作。
注:若电机不动作时,适当增大P05(力矩提升)值。
若电机运转方向不正确,改变输出相序。
7、4运行控制设定的确认
7、5频率控制设定的确认
P09设定值控制方式
0手动(在Fr模式下设定频率)
1编码器方式
2编码器方式的循环运行
3编码器方式的门宽自学习
44个位置开关方式
54个位置开关方式的循环运行
6通信
8、功能参数表
序号参数名称出厂值范围倍数单位编辑P01主加速时间 1.10-99910Sec R/W P02主减速时间 1.10-99910Sec R/W P03V/F特性500-21Sec R
P04V/F曲线00-11Code R
P05力矩提升150-401-R/W P06选择电子热敏功能20-31%R
P07设定热敏继电器 2.10.1-10010-R
P08选择运行指令20-31A R
P09频率设定信号40-61-R
P10停止模式00-11-R
P11停止频率0.50.50-60100-R
P12DC制动时间0.00-12010Hz R
P13DC制动电平0.00-1000.2Sec R
P14最大输出频率50.0050-250100-R
P15基底频率50.0045-250100Hz R
P16防止过电流失速功能10-11Hz R
P17防止过电压失速功能10-11Hz R
P18第1跳跃频率0.000,0.5-250100Hz R
P19第2跳跃频率0.000,0.5-250100Sec R
P20第3跳跃频率0.000,0.5-250100-R
P21跳跃频率宽度00-101-R
P22电流限流功能0.00-9.910Sec R
P23启动方式00-31-R
P24选择瞬时停止再次启动00-21-R
P25待机时间0.10-0.1-100210Sec R
P26选择再试行00-31-R
P27再试行次数11-101Times R
P28下限频率0.50.5-250100Hz R
P29上限频率2500.5-250100Hz R
P30选择监控00-11-R
P31线速度倍率 3.00.1-10010Multiple R/W P32最大输出电压00-5001VAC R
P33OCS电平1401-2001%R
P34载波频率150.8-151Code R
P35通讯站号11-311-R
P36通讯速度9648.96.1921Code R
P37停止位11-21Bit R
P38校验位00-1-21-R
P39通讯0.00.0-60.010Sec R
P40通讯响应时间11-9991Ms R
P41密码00-9991-R
P42设定数据清除00-11-R
P43输入信号逻辑设定27(54)0-31(63)1-R
P44光幕/安全触板响应时间100-9991Ms R
P45到达信号响应时间101-9991Ms R
P46编码器异常检出时间0.00-2.010Sec R
P47到达SW异常检出时间0.00-10.010Sec R
P48选择RY1输出功能70-151-R
P49选择RY2输出功能40-151-R
P50选择RY3输出功能50-151-R
P51电机极数62-60.5Pole R
P52编码器线数51250-9991Pulse R
P53系统参数(不修改)0----1-R
P54系统参数(不修改) 1.0----10Multiple R/W P55系统参数(不修改)0.0----10Sec R/W P56系统参数(不修改) 1.0----10Multiple R/W P57系统参数(不修改)0.0----10Sec R/W P58系统参数(不修改) 5.00----100Hz R/W P59过载检出频率110.000.5-250100Hz R/W P60过载检出频率250.000.5-250100Hz R/W P61过载检出电流1 1.200.1-100100A R/W P62过载检出电流2 1.200.1-100100A R/W P63过载检出时间500-9991Ms R/W P64过载频率比率(低速)50.000-100100%R/W P65过载频率比率(高速)70.000-100100%R/W P66过载检出切换频率 5.000.5-250100Hz R/W P67过载检出时间1000-9991Ms R/W P68始动确认时间200100-9991Ms R/W P69强制开动作检出时间0.00-50010Sec R/W P70异常检出开动作、强制动作时间0.00-50010Sec R/W P71异常开时到达时等待时间0.00-10.010Sec R/W P72反复开到达时保持时间 3.00-1010Sec R/W P73反复关到达时保持时间 3.00-1010Sec R/W P74加减速曲线选择10-21-R/W P75开/闭动作中停止选择00-11-R/W P76无到达信号选择00-1-2-
P77滑差到达判定频率10.1-10Hz
P78滑差到达判定时间1001-999Ms
P79滑差开到达代入选择00-10Sec
P80安全传感器功能选择00-1-21-
P81异常开动作时强制开动作时间00-500Sec
D00D参数区密码输入00-9991-R/W D01门宽脉冲数DEP0-655351-R/W D02闭到达位置0.000-100100%R/W D03开变速位置1 1.500-100100%R/W D04开变速位置216.000-100100%R/W D05开变速位置350.000-100100%R/W D06开变速位置470.000-100100%R/W D07开变速位置580.000-100100%R/W D08开到达位置100.000-100100%R/W D09闭变速位置195.000-100100%R/W D10闭变速位置275.000-100100%R/W D11闭变速位置355.000-100100%R/W D12闭变速位置415.000-100100%R/W D13闭变速位置513.000-100100%R/W D14闭到达保持频率 2.00-250100Hz R/W D15开频率1 6.000-250100Hz R/W D16开频率2 6.000-250100Hz R/W D17开频率320.000-250100Hz R/W D18开频率420.000-250100Hz R/W D19开频率520.000-250100Hz R/W D20开频率6 3.000-250100Hz R/W D21开到达保持频率 2.000-250100Hz R/W D22闭频率1 6.000-250100Hz R/W D23闭频率2 6.000-250100Hz R/W D24闭频率318.000-250100Hz R/W D25闭频率418.000-250100Hz R/W D26闭频率518.000-250100Hz R/W D27闭频率6 2.00-250100Hz R/W D28开加减速时间1 3.20.0-99910Sec R/W D29开加减速时间20.50.0-99910Sec R/W D30开加减速时间3 2.80.0-99910Sec R/W D31开加减速时间40.50.0-99910Sec R/W D32开加减速时间50.50.0-99910Sec R/W D33开加减速时间6 1.60.0-99910Sec R/W D34闭加减速时间1 3.20.0-99910Sec R/W D35闭加减速时间20.50.0-99910Sec R/W D36闭加减速时间3 2.40.0-99910Sec R/W D37闭加减速时间40.50.0-99910Sec R/W D38闭加减速时间5 1.20.0-99910Sec R/W D39闭加减速时间6 1.50.0-99910Sec R/W D40开时保持电流0.50-10010A R/W
D41闭时保持电流
0.50-10010A R/W D42开/闭保持动作停止时间00-99910Sec R/W D43开到达保持待机频率 1.800.5-250100Hz R/W D44闭到达保持待机频率0.800.5-250100Hz R/W D45开到达保持待机时间0.50-1010Sec R/W D46闭到达保持待机时间
1.800-1010Sec R/W D47开始动定时时间(SW 方式)0.000-3100Sec R/W D48开始减定时时间(SW 方式)0.000-3100Sec R/W D49闭始动定时时间(SW 方式)0.000-3100Sec R/W D50闭减速定时时间(SW 方式)0.000-3
100Sec R/W D51电源ON 时动作频率00-0.5-250100Hz R/W D52门宽自学习频率 2.000.5-250100Hz R/W D53
D 区密码设定00-9991-
R/W
9、监控和故障显示附表9、1监控序号名称精度单位备注n00软件版本号CODE n01输出频率0.001Hz n02输出电流0.1A n03输出电压0.1Vac n04输入DC 电压0.1Vdc n05设定频率0.01Hz n06检出频率0.01Hz 设置电机极数、编码器的线数
n07门位置区域10-7:开门区域;8-13:关门区域n08门宽(脉冲数)0.010.01=1;100=10000
n09开到达位置
(DATA )0.01开到达信号由OFF-ON 时的门位置n10开关门次数1次0.01=1次;100=10000次
n11编码器检出状态0.1
kHz
F :正转(开门)R :反转(关门)
n12异常1CODE
n13异常1n14异常1n15异常1
n16输入端子状态n17输出端子状态
9、2故障显示面板显示故障内容原因对策
相关参数SC1过电流/异常过热输出短路.接地短路环境温度过高加速度时间短
确认接线
减低温度
加速度时间延时
加减速时间
SC2SC3
OC1过电流
输出欠相提升力矩过高加速度时间短输出欠相确认提升力矩减低加速度时间延长加减速时间P05OC2OC3OV1过电压减速时间短
减速时间延长制动电阻是否接上加减速时间P17OV2OV3LV 欠电压电源电压低瞬时停电
电源确认
启动再启动功能P23-25OL 过负载电子热敏继电器动作负载过大
负载状态确认电子热敏继电器的确认P05P06,P07AU 外部异常异常停止的信息被送出通讯确认OP
操作异常
电源ON 时,运行信号ON
设定时,运行信号ON 运行中,操作面板脱落通讯超时
运行信号确认操作面板接线确认
P23P39
Er1编码器无脉冲输入
编码器输入脉冲无编码器的电源确认编码器的配线确认P51,P52P46Er2编码器输入相反编码器脉冲方向与运行指令的方向相反
编码器的A/B 相配线确认
P51,P52P46Er3到达信号均ON 开/关门到达信号同时ON
开/关到达信号确认P43P45Er4开到达信号无门位置数据为开到达状态时却无到达信号开到达信号确认P43P45Er5
关到达信号无
门位置数据为开到达状态时却无到达信号
关到达信号确认
P43
P45
附注:
设定完各参数的数据后,为了防止不小心改变数据,可以设定密码。参数p41:全区密码(P 参数区域,d 参数区域)的参数设定密码。设定范围:000;1~999(设定为:“000”时表示不设定密码)
设定密码后参数数据的变更步骤:以参数p41的密码设定为“777”为例
1、按“STOP”键,使电梯门控制器停止运行。
2、按4次“MODE”键,变为密码输入显示(PS ),显示闪烁。
3(显示闪烁)4、按“SET”键,显示出参数号(上一次的参数号:比如P01等)(出厂未作密码设定,若进行密码设定,请记录密码,以防忘记。)
松下数字交流伺服调试说明书.
Panasonic 松下数字交流伺服 安装调试说明书 (2003.11版本)
目 录 1. 松下连接示意图 2. 通电前的检查 3. 通电时的检查 4. 松下伺服驱动器的参数设定 5. 松下伺服驱动器的参数和性能优化调整
1. 松下连接示意图 重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。否则,会损坏编码器。(此种 情况,不在松下的保修范围!) 2. 通电前的检查 1) 确认松下伺服驱动器和电机插头的连接,相序是否正确: A.中惯量电机,不带刹车制动器的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 注: 电机相序错误,通电时会发生电机抖动现象。
B.中惯量电机MDMA 0.75KW-2.5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U F V I W B 接地 D 刹车电源 G 刹车电源 H C. 中惯量电机MDMA 3KW-5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U D V E W F 接地 G 刹车电源 A 刹车电源 B 2)确认松下伺服驱动器CN SIG和松下伺服电机编码器联接正确, 接插件螺丝拧紧。 3)确认松下伺服驱动器CN I/F和数控系统的插头联接正确, 接插件螺丝拧紧。 3.通电时的检查 1) 确认三相主电路输入电压在200V-220V范围内。 建议用户选用380V/200V的三相伺服变压器。 2)确认单相辅助电路输入电压在200V-220V范围内。
松下伺服电机常见问题及处理办法
. 松下伺服电机常见问题及处理办法 一、基本接线 主电源输入采用~220V,从L1、L3接入(实际使用应参照操作手册); 控制电源输入r、t也可直接接~220V; 电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。 二、试机步骤 1.JOG试机功能 仅按基本接线就可试机; 在数码显示为初始状态‘r 0'下,按‘SET'键,然后连续按‘MODE'键直至数码显示为‘AF-AcL',然后按上、下键至‘AF-JoG'; 按‘SET'键,显示‘JoG -':按住‘^'键直至显示‘rEAdy'; 按住‘<'键直至显示‘SrV-on'; 按住‘^'键电机反时针旋转,按‘V'电机顺时针旋转,其转速可由参数Pr57设定。 按‘SET'键结束。 2.内部速度控制方式 COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV- ON(29脚)接COM-; 参数No.53、No.05设置为1: (注此类参数修改后应写入EEPROM,并重新上电)调节参数No.53,即可使电机转动。参数值即为转速,正值反时针旋转,负值顺时针旋转。 3.位置控制方式 COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV- ON(29脚)接COM-; PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V); PLUS2(4脚)接脉冲信号,SIGN(6脚)接方向信号; 参数No.02设置为0,No42设置为3,No43设置为1; PLUS(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转
向。 另外,调整参数No.46、No.4B,可改变电机每转所需的脉冲数(即电子齿轮)。常见问题解决方法: '. . 1.松下数字式交流伺服系统MHMA 2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决? 这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。请调整参数No.10、No.11、No.12,适当降低系统增益。(请参考《使用说明书》中关于增 益调整的内容) 2.松下交流伺服驱动器上电就出现22号报警,为什么? 22号报警是编码器故障报警,产生的原因一般有: 编码器接线有问题:断线、短路、接错等等,请仔细查对; 电机上的编码器有问题:错位、损坏等,请送修。 3.松下伺服电机在很低的速度运行时,时快时慢,象爬行一样,怎么办? 伺服电机出现低速爬行现象一般是由于系统增益太低引起的,请调整参数No.10、No.11、No.12,适当调整系统增益,或运行驱动器自动增益调整功能。(请参考《使用说明书》中关于增益调整的内容) 4.松下交流伺服系统在位置控制方式下,控制系统输出的是脉冲和方向信号,但不管是正转指令还是反转指令,电机只朝一个方向转,为什么? 松下交流伺服系统在位置控制方式下,可以接收三种控制信号:脉冲/方向、正/反脉冲、A/B正交脉冲。驱动器的出厂设置为A/B正交脉冲(No42为0),请将No42改为3(脉冲/方向信号)。 5.松下交流伺服系统的使用中,能否用伺服-ON作为控制电机脱机的信号,以便直接转动电机轴? 尽管在SRV-ON信号断开时电机能够脱机(处于自由状态),但不要用它来启动
松下伺服器接线总结..-共27页
松下伺服电机接线总结 伺服驱动器型号:MDDHT5540 伺服电机型号:MSME152G1H 运动控制卡型号:PCI-1240 1、主电路 工作原理:按下空气开关MCCB后,控制电路L1C、L2C先得电。此时ALM+引脚有输出,ALM回路控制的回路接通,ALM回路的继电器控制的开关ALM 闭合。软件开关通过程序控制主电路的通断,正常运行情况下一直运行。此时只要按下开始按钮ON,电磁接触器线圈主电路瞬间接通,电磁接触器线圈MC得电后,使电磁接触器控制的开关MC闭合,此时即使开始按钮ON断开,由于电路的自锁作用,主电路仍然接通。 2、脉冲发送电路
接线根据: 运动控制卡PCI-1240给出的控制卡功能模块图如下图所示 由图可知,运动控制卡输出脉冲的方式为长线驱动方式。 松电机下伺服使用手册中P3-35(P151)中提到长线驱动接线端子说明如下图 手册P3-18(P134)给出的长线驱动接线方法如下图
3、编码器反馈脉冲接收电路 接线原理:关于利用伺服驱动器输出的ABZ相脉冲计算伺服电机的旋转角度(参考 网址:http://bbs.gongkong1/Details/201910/2019103112034201901-1.shtml)推荐做法:先将OA、OB脉冲四倍频(类似于DSP的QEP计数模块),具体实现的时候只需要记住OA、OB的每个脉冲跳变即可实现四倍频,同时要辩相,一般我们定义OA超前OB为电机旋转正方向,此时脉冲累加,否则为负方向,脉冲累减。知道了脉冲个数就好办了,如果松下伺服输出的脉冲个数为一圈2500个,由于我们四倍频了,故实际到我们这里就应该是10000个没圈,根据这个脉冲你就可以知道电机的相对位置。根据OC信号,你可以知道电机的绝对位置,一般定义OC出现的时刻就是电机转子的零位,因此每次检测到OC出现,就应该认为绝对位置出现,这样可以清除累积误差。根据收到的脉冲数,采用M法测速也可以计算出实际电机的转速。 接线根据: 伺服驱动器说明书P3-32(P148)给出的接线说明
松下伺服驱动器故障报警内容和处理方法
松下伺服驱动器故障报警 内容和处理方法 Revised by Jack on December 14,2020
松下伺服驱动器故障报警内容和处理方法 代码:11 保护功能:控制电源欠电压 故障原因:控制电源逆变器上P、N间电压低于规定值。 1)交流电源电压太低。瞬时失电。 2)电源容量太小。电源接通瞬间的冲击电流导致电压跌落。 3)驱动器(内部电路)有缺陷。 应对措施:测量L1C、L2C和r、t之间电压。 1)提高电源电压。更换电源。 2)增大电源容量。 3)请换用新的驱动器。 代码:12 保护功能:过电压 故障原因:电源电压高过了允许输入电压的范围。逆变器上P、N间电压超过了规定值。电源电压太高。存在容性负载或UPS(不间断电源),使得线电压升高。 1)未接再生放电电阻。 2)外接的再生放电电阻不匹配,无法吸收再生能量。 3)驱动器(内部电路)有缺陷。 应对措施:测量L1、L2和L3之间的相电压。配备电压正确的电源。排除容性负载。 1)用电表测量驱动器上P、B间外接电阻阻值。如果读数是“∞”,说明电阻没有真正地接入。请换一个。
2)换用一个阻值和功率符合规定值的外接电阻。 3)请换用新的驱动器。 代码:13 保护功能:主电源欠电压 故障原因:当参数Pr65(主电源关断时欠电压报警触发选择)设成1时,L1、L3相间电压发生瞬时跌落,但至少是参数Pr6D(主电源关断检测时间)所设定的时间;或者,在伺服使能(Servo-ON)状态下主电源逆变器P-N间相电压下降到规定值以下。 1)主电源电压太低。发生瞬时失电。 2)发生瞬时断电。 3)电源容量太小。电源接通瞬间的冲击电流导致电压跌落。 4)缺相:应该输入3相交流电的驱动器实际输入的是单相电。 5)驱动器(内部电路)有缺陷。 应对措施:测量L1、L2、L3端子之间的相电压。 1)提高电源电压。换用新的电源。排除电磁继电器故障后再重新接通电源。 2)检查Pr6D设定值,纠正各相接线。 3)请参照“附件清单”,增大电源容量。 4)正确连接电源的各相(L1、L2、L3)线路。单相电源请只接L1、L3端子。 5)请换用新的驱动器。 代码:15 保护功能:电机和驱动器过热 故障原因:伺服驱动器的散热片或功率器件的温度高过了规定值。 1)驱动器的环境温度超过了规定值。
松下A5伺服驱动器IF口接脚详解
松下A5伺服驱动器I/F口(X4)接脚详解 1脚:OPC1,指令脉冲输入2,脉冲信号 2脚:OPC2,指令符号输入2,控制方向 3脚:PULS1,指令脉冲输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W的电阻 4脚:PULS2,指令脉冲输入2,plc脉冲输出端子。 5脚:SIGN1,指令符号输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W的电阻 6脚:SIGN2,指令符号输入2,plc继电器输出端子, 1——6脚该段输入脉冲在500kpps以下使用。为光电耦合器输入。对应行驱动线/开路集电极。容许输入最高频率在长线驱动器输入时为500kpps,集电极开路输入时为200kpps。 设置参数为:PR0.06指令脉冲极性设定/PR0.07指令脉冲输入模式设定/PR0.05指令脉冲输入选择 最大输入电压DC24V,额定电流10mA。(输入电路参考3--30) 7脚:COM+,控制信号电源(+).电源的最低电压为11.4V以上。 8脚:NOT,反向驱动禁止输入。 9脚:POT,正向驱动禁止输入。 8——9脚参数设置为:PR5.04驱动禁止输入设定(默认值1)/PR5.05驱动禁止时顺序设置(默认值0),(接脚描述参考3--38)与错误码38有关联。 10脚:BRKOFF-,外部制动器解除输出。 11脚:BRKOFF+,外部制动器解除输出。 12脚:ZSP,零速检测输出。 13脚:GND,信号地。 14脚:SPR/TRQR/SPL,速度指令输入/转矩指令输入/速度限制输入。 15脚:GND,信号地。 16脚:P-ATL/TRQR,正向转矩限制输入/转矩指令输入。 17脚:GND,信号地。 18脚:N-ATL,反向转矩限制输入。 14——18脚(输入电路参考3--31) 19脚:CZ,Z相输出(开路集电极)。 20脚:无。。 21脚:OA+,A相输出。 22脚:OA-,A相输出。 23脚:OZ+,Z相输出。 24脚:OZ-,Z相输出。 25脚:GND,信号地。 控制输入出厂设定见3—37,4-32,4-33 26脚:VS-SEL1;ZEROSPD;SI3输入, 位置控制时为减震控制切换输入(VS-SEL1),设置参数为PR2.13减振滤波器切换选择。 速度、转矩控制时为零速箝位输入(ZEROSPD),设置参数为PR3.15零速箝位机能选择(默认值0,无效)/PR3.16零速箝位等级。 27脚:GAIN;SI4输入, 增益切换输入(GAIN), 位置控制时PR1.15 速度控制时PR1.20 转矩控制时PR1.24
松下a1伺服说明书
松下a1伺服说明书 篇一:Panasonic伺服参数设定说明 Panasonic(MINAS A系列)伺服參數設定說明: 备注: 1、首先设置驱动器的电子齿轮比和需要马达转一圈回授的脉冲数计算方法如下:MSMA0421A 通常新代控制器所设精度单位 1um/Pules (可在系统参数17中设所 需精度单位)通常新代控制器所设的倍频数是4 倍(可在系统参数81~100中所设轴 卡的倍频) 计算公式: F= f × (Pr 46 × 2Pr 4A) / Pr 4B = 10000或(217) 注: F —电机转一圈所需的内部指令脉冲数(编码器的分辨率)f —电机转一圈所需指令脉冲数 马达转一圈回授的脉冲数= 负载转一圈移动量脉冲数÷控制器内部所设的倍频 4 ****** ex: ****** 当螺杆的节距是10mm,马达选用A 型编码器分辨率,采用直传连轴器那齿轮比计算如下: 负载转一圈移动量脉冲数 = 10mm÷1um/Pules =104 Pules M / N = 1 / 1
F(10000) = f(10000) × { Pr 46 × 2Pr 4A ) ÷Pr 4B 把 Pr 4A = 0 1、Pr 46 = 100002、Pr 4B = 10000 2、设定上表中的驱动器参数,值为后面的设定值;Pr 4A、Pr 46、Pr 4B为上面公式根据实际情况计算出来的值;Pr 10、Pr 11、Pr 12先(原文来自:小草范文网:松下a1伺服说明书)不修改数值,为出厂值; 3、调整机台的刚性,先进行X、Y、Z 轴的来回运动,通过自动整定调谐驱动器参数值,按加1数值增大;通常调节到机台出现震动或有声音后,降回原一级。注意一点:调完后,需把X、Y、Z的位置增益Pr 10设成一样大; 注意:齿轮比设错,编码器会无回授,同时控制器发遗失位置命令、严重追随 误差警报。 使用面板设定参数的方式: 1、接通驱动器电源; 2、按set键按钮; 3、按住MODE键按钮,到显示为:“PA_ 00”; 4、按上↑、或下↓键按钮,来选择需要设定的数号,如选择10号参数,显示为:“PA_ 10”; 5、按set键按钮,进入对应参数值,显示为:“ 50”; 6、用左←键、上↑键、下↓键,来修改设定数值; 7、修
松下伺服电机常见问题及处理办法
松下伺服电机常见问题及处理办法 一、基本接线 主电源输入采用~220V ,从L1、L3 接入(实际使用应参照操作手册); 控制电源输入r、t 也可直接接~220V ; 电机接线见操作手册第22、23 页,编码器接线见操作手册第24~26 页,切勿接错。 二、试机步骤 1. J OG 试机功能 仅按基本接线就可试机; 在数码显示为初始状态‘r 0’下,按‘SET ’键,然后连续按‘MODE ’键直至数码显示为‘AF -AcL ’,然后按上、下键至‘AF-JoG ’; 按‘SET ’键,显示‘JoG - ’:按住‘^’键直至显示‘rEAdy ’; 按住‘<’键直至显示‘SrV-on ’; 按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57 设定。 按‘SET ’键结束。 2. 内部速度控制方式 COM +(7 脚)接+12~24VDC,COM- (41 脚)接该直流电源地;SRV-ON(29 脚)接COM-; 参数No.53 、No.05 设置为1:(注此类参数修改后应写入EEPROM, 并重新上电) 调节参数No.53, 即可使电机转动。参数值即为转速,正值反时针旋转,负值顺时针旋转。
3. 位置控制方式 COM +(7 脚)接+12~24VDC,COM- (41 脚)接该直流电源地;SRV-ON(29 脚)接COM-; PLUS1 (3 脚)、SIGN1 (5 脚)接脉冲源的电源正极(+5V ); PLUS2 (4 脚)接脉冲信号,SIGN (6 脚)接方向信号; 参数No.02 设置为0,No42 设置为3,No43 设置为1; PLUS (4 脚)送入脉冲信号,即可使电机转动;改变SIGN2 即可改变电机转向。 另外,调整参数No.46 、No.4B, 可改变电机每转所需的脉冲数(即电子齿轮)。 常见问题解决方法: 1. 松下数字式交流伺服系统MHMA 2KW ,试机时一上电,电机就振动并有很大 的噪声,然后驱动器出现16 号报警,该怎么解决? 这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。请调整参数No.10 、No.11 、No.12 ,适当降低系统增益。(请参考《使用说明书》中关于增益调整的内容) 2. 松下交流伺服驱动器上电就出现22 号报警,为什么? 22 号报警是编码器故障报警,产生的原因一般有: 编码器接线有问题:断线、短路、接错等等,请仔细查对; 电机上的编码器有问题:错位、损坏等,请送修。 3. 松下伺服电机在很低的速度运行时,时快时慢,象爬行一样,怎么办?
松下伺服驱动器故障报警内容和处理方法
代码:11 保护功能:控制电源欠电压 故障原因:控制电源逆变器上P、N间电压低于规定值。 1)交流电源电压太低。瞬时失电。 2)电源容量太小。电源接通瞬间的冲击电流导致电压跌落。 3)驱动器(内部电路)有缺陷。 应对措施:测量L1C、L2C和r、t之间电压。 1)提高电源电压。更换电源。 2)增大电源容量。 3)请换用新的驱动器。 代码:12 保护功能:过电压 故障原因:电源电压高过了允许输入电压的范围。逆变器上P、N间电压超过了规定值。电源电压太高。存在容性负载或UPS(不间断电源),使得线电压升高。 1)未接再生放电电阻。 2)外接的再生放电电阻不匹配,无法吸收再生能量。 3)驱动器(内部电路)有缺陷。 应对措施:测量L1、L2和L3之间的相电压。配备电压正确的电源。排除容性负载。 1)用电表测量驱动器上P、B间外接电阻阻值。如果读数是“∞”,说明电阻没有真正地接入。请换一个。 2)换用一个阻值和功率符合规定值的外接电阻。 3)请换用新的驱动器。 代码:13 保护功能:主电源欠电压 故障原因:当参数Pr65(主电源关断时欠电压报警触发选择)设成1时,L1、
L3相间电压发生瞬时跌落,但至少是参数Pr6D(主电源关断检测时间)所设定的时间;或者,在伺服使能(Servo-ON)状态下主电源逆变器P-N间相电压下降到规定值以下。 1)主电源电压太低。发生瞬时失电。 2)发生瞬时断电。 3)电源容量太小。电源接通瞬间的冲击电流导致电压跌落。 4)缺相:应该输入3相交流电的驱动器实际输入的是单相电。 5)驱动器(内部电路)有缺陷。 应对措施:测量L1、L2、L3端子之间的相电压。 1)提高电源电压。换用新的电源。排除电磁继电器故障后再重新接通电源。 2)检查Pr6D设定值,纠正各相接线。 3)请参照“附件清单”,增大电源容量。 4)正确连接电源的各相(L1、L2、L3)线路。单相电源请只接L1、L3端子。 5)请换用新的驱动器。 代码:15 保护功能:电机和驱动器过热 故障原因:伺服驱动器的散热片或功率器件的温度高过了规定值。 1)驱动器的环境温度超过了规定值。 2)驱动器过载了。 应对措施: 1)降低环境温度,改善冷却条件。 2)增大驱动器与电机的容量。 延长加/减速时间。 减轻负载。 代码:16 保护功能:过载 故障原因:转矩指令实际值超过参数Pr72设定的过载水平时,按照电机的
松下伺服调试说明.
Panasonic 松下数字交流伺服 安装调试说明书 (2003.11版本 目录 1.松下连接示意图 2.通电前的检查
3.通电时的检查 4.松下伺服驱动器的参数设定 5.松下伺服驱动器的参数和性能优化调整1.松下连接示意图
重要提示:由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。否则,会损坏编码器。(此种情况,不在松下的保修范围! 2.通电前的检查 1确认松下伺服驱动器和电机插头的连接,相序是否正确: A.中惯量电机,不带刹车制动器的连接: 伺服驱动器电机插头U A V B
W C 接地 D 注:电机相序错误,通电时会发生电机抖动现象。 B.中惯量电机MDMA0.75KW-2.5KW,带刹车制动器电机的连接: 伺服驱动器电机插头 U F V I W B 接地 D 刹车电源 G 刹车电源 H
C.中惯量电机MDMA3KW-5KW,带刹车制动器电机的连接: 伺服驱动器电机插头 U D V E W F 接地 G 刹车电源 A 刹车电源 B 2确认松下伺服驱动器CN SIG和松下伺服电机编码器联接正确,接插件螺丝拧紧。 3确认松下伺服驱动器CN I/F和数控系统的插头联接正确, 接插件螺丝拧紧。
3.通电时的检查 1确认三相主电路输入电压在200V-220V范围内。 建议用户选用380V/200V的三相伺服变压器。 2确认单相辅助电路输入电压在200V-220V范围内。 4.松下伺服驱动器的参数设定 1松下伺服驱动器修改参数的操作方法 A.接通驱动器电源; B.按操作面板上的“SET”键; C.按住“MODE”键,选择参数页面PR_00; D.用上○∧,下○∨按钮,选择你需要修改参数的参数号码PR_42(例修改42号参数; E.按“SET”键,显示原来的参数值00; F.用左○<,上○∧,下○∨按钮,改变参数值; G.修改完毕,按“SET”键确定。 重复以上D~G过程,修改其它参数。修改参数操作完毕,切记选择驱动器EEPROM写入模式,保存参数。