匀速圆周运动动力学问题分析
第8课时 匀速圆周运动动力学问题分析
一.知识内容:
1. 匀速圆周运动的动力学描述:
(1)向心力:ma F n =;方向沿半径指向圆心;根据效果命名;产生向心加速度; 由合力提供向心力。
(2)动力学方程:ωπωmv T
mr mr r v m ma F n =====222
24;
2. 做匀速圆周运动的条件:
(1)具有一定初速度v ; (2)合力与v 垂直(沿半径指向圆心); (3)r
v m F 2
=;
大小不变;
3. 动力学问题分析方法:(圆心、半径、轨迹、向心力) (1)确定做匀速圆周运动的物体作为研究对象。
(2)明确运动情况。包括搞清运动速率υ、轨迹半径R 及轨迹圆心O 的位置等,只有明 确了上述几点后,才能知道运动物体在运动过程中所需的向心力大小(R m /2υ)和 向心力方向(指向圆心)。
(3)分析受力情况,对物体实际受力情况作出正确的分析,画出受力图,确定指向圆心 的合外力F (即提供的向心力)。
(4)代入公式r
v m F 2=,求解结果。
二.应用分析:
1. 向心力来源分析:
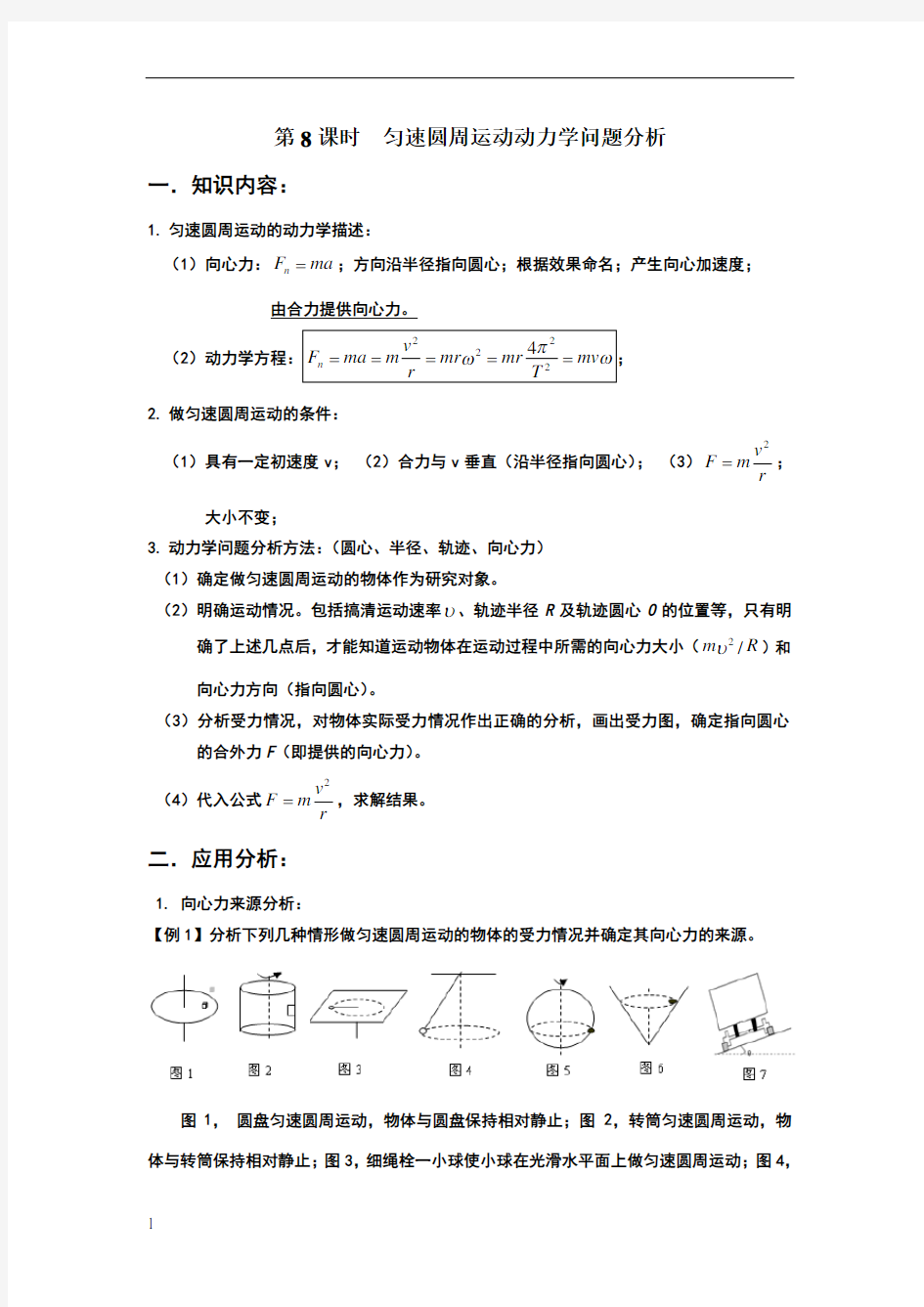
【例1】分析下列几种情形做匀速圆周运动的物体的受力情况并确定其向心力的来源。
图1, 圆盘匀速圆周运动,物体与圆盘保持相对静止;图2,转筒匀速圆周运动,物体与转筒保持相对静止;图3,细绳栓一小球使小球在光滑水平面上做匀速圆周运动;图4,
用悬线将小球系在天花板上,小球在水平面内做匀速圆周运动(圆锥摆);图5,小球套在光滑圆环上,与圆环保持相对静止,圆环绕竖直方向对称轴匀速转动;图6,小球沿光滑固定漏斗内壁做水平面上的匀速圆周运动;图7,火车以规定速度转弯。
2. 临界问题分析:
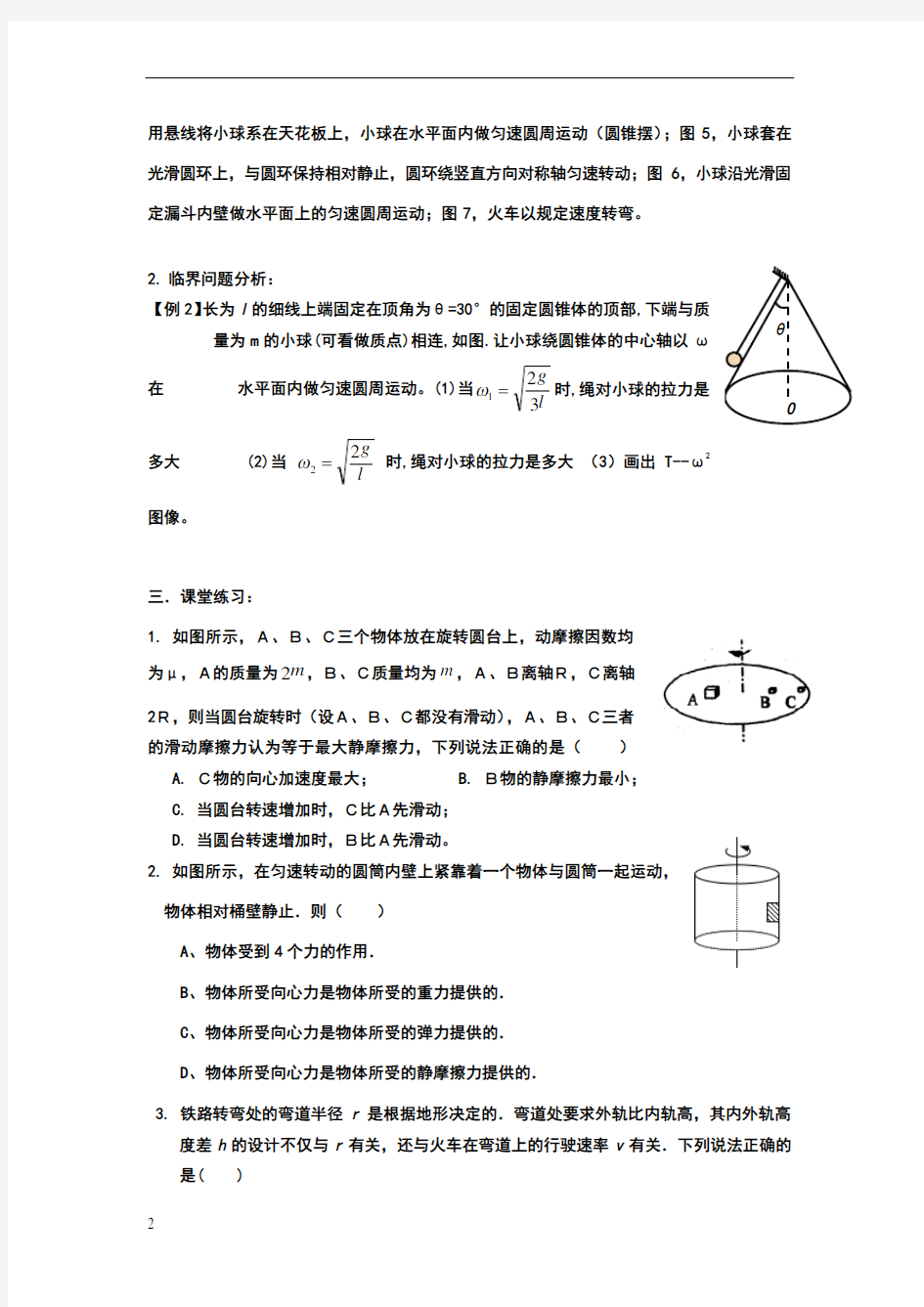
【例2】
长为l 的细线上端固定在顶角为θ=30°的固定圆锥体的顶部,下端与质 量为m 的小球(可看做质点)相连,如图.让小球绕圆锥体的中心轴以ω在 水平面内做匀速圆周运动。(1)当l
g
321=
ω时,绳对小球的拉力是多大 (2)当 l
g 22=ω 时,绳对小球的拉力是多大 (3)画出T--ω2
图像。
三.课堂练习:
1. 如图所示,A、B、C三个物体放在旋转圆台上,动摩擦因数均为μ,A的质量为2m ,B、C质量均为m ,A、B离轴R,C离轴2R,则当圆台旋转时(设A、B、C都没有滑动),A、B、C三者的滑动摩擦力认为等于最大静摩擦力,下列说法正确的是( ) A. C物的向心加速度最大; B. B物的静摩擦力最小; C. 当圆台转速增加时,C比A先滑动; D. 当圆台转速增加时,B比A先滑动。
2. 如图所示,在匀速转动的圆筒内壁上紧靠着一个物体与圆筒一起运动, 物体相对桶壁静止.则( ) A 、物体受到4个力的作用.
B 、物体所受向心力是物体所受的重力提供的.
C 、物体所受向心力是物体所受的弹力提供的.
D 、物体所受向心力是物体所受的静摩擦力提供的.
3. 铁路转弯处的弯道半径r 是根据地形决定的.弯道处要求外轨比内轨高,其内外轨高度差h 的设计不仅与r 有关,还与火车在弯道上的行驶速率v 有关.下列说法正确的是( )
O
θ
A.v一定时,r越小则要求h越大 B.v一定时,r越大则要求h越大
C.r一定时,v越小则要求h越大 D.r一定时,v越大则要求h越大
4. 质量为m的飞机,以速度v在水平面内做半径为R的匀速圆周运动,空气对飞机作用力的大小等于( )
A.m g2+v2
R
2 B.m
v2
R
C.m
v2
R
2-g2 D.mg
5. m=小球用A、B两绳相连,两绳固定在直杆上A、B两点,L AC=2m,当
两绳拉直时与杆夹角θ1=300,θ2=450,g取10m/s2,求:(1)球绕杆转动
ω满足什么条件,A、B绳拉紧(2)当ω=3rad/s时,A、B两绳拉力
6. 沿半径为R的半球型碗底的光滑内表面,质量为m的小球正以角速度ω,在一水平面内
作匀速圆周运动,试求此时小球离碗底的高度。
7. A、B两球质量分别为m1与m2,用一劲度系数为K的弹簧相连,
一长为l1的细线与m1相连,置于水平光滑桌面上,细线的另一端
拴在竖直轴OO`上,如图所示,当m1与m2均以角速度ω绕OO` 做匀速圆周运动时,弹簧长度为l2。
求:(1)此时弹簧伸长量多大绳子张力多大
(2)将线突然烧断瞬间两球加速度各多大
第8课时匀速圆周运动动力学问题分析
参考答案
【例2】解答:R
h
(1)小球将要离开锥面时的l
g
3320=ω;ω1<ω0,锥体有支持力, 绳的拉力T 1=;
(2)ω2>ω0;小球离开锥体,绳的拉力T 2=2mg ; (3)ω<ω0, 绳的拉力24
12
3ωml mg T +=;
0ωω>时,绳的拉力2ωml T =; 做出2ω-T 图像;
课堂练习:
1、ABC;
2、C ;
3、AD;
4、A; 5. 6、2
ωg
R h -
=;
7、(1)2212)(1ωl l m k
x +=?; 2212211)(ωωl l m l m T ++=; (2)2211
2
1)(ωl l m m a +=
;2212)(ωl l a +=;
张力减径机的动力学和运动学的分析详细版
文件编号:GD/FS-1093 (解决方案范本系列) 张力减径机的动力学和运动学的分析详细版 A Specific Measure To Solve A Certain Problem, The Process Includes Determining The Problem Object And Influence Scope, Analyzing The Problem, Cost Planning, And Finally Implementing. 编辑:_________________ 单位:_________________ 日期:_________________
张力减径机的动力学和运动学的分 析详细版 提示语:本解决方案文件适合使用于对某一问题,或行业提出的一个解决问题的具体措施,过程包含确定问题对象和影响范围,分析问题,提出解决问题的办法和建议,成本规划和可行性分析,最后执行。,文档所展示内容即为所得,可在下载完成后直接进行编辑。 文章主要对三辊式张力减径机进行分析,主要分析张力减径机的动力学和运动学原理,通过对张力减径机的速度分析、转速分析和速度控制来分析张力减径机运动学特征,通过对张力减径机受力分析、轧制压力和轧制力矩进行分析张力减径机的动力学特征分析。 张力减径机是现代化的生产机组,其作用和优越性使其在大规模无缝钢管生产中不可缺少。随着我国钢管工业的发展张力减径机组正被广泛运用。对三辊式张力减径机进行分析,该机组是90年代研制的,具有许多独特的优点。以下分析张力减径机的运动学
和动力学原理。 1.张力减径机的运动学特征 1.1.运动学特征 在张力减径的过程中,要求各个机架的延伸系数和轧辊圆周协调一致,同时决定连轧机工作的基本条件要求通过每个机架的金属的秒流量相等。 在所有的机架都充满金属而C不等于0的情况下,对于每对轧辊在任意瞬间都遵守秒流量、相等的原则,这种相等可通过轧辊和金属之间的滑移达到。因此当C不等于0时,减径机任何一个机架中的变形条件发生变化,都会影响其余机架中的变形条件,但由于连轧过程本身存在着相适应,自相调整的过程,因此即使在这种相互作用的复杂关系中减径过程仍然能够在任一瞬间保持秒流量相等。但是当差别较大时,必然会造成严重的拉钢和推钢,轻者不能获得
仿人机器人运动学和动力学分析
国防科学技术大学 硕士学位论文 仿人机器人运动学和动力学分析 姓名:王建文 申请学位级别:硕士 专业:模式识别与智能系统 指导教师:马宏绪 20031101
能力;目前,ASIMO代表着仿人机器人研究的最高水平,见图卜2。2000年,索尼公司也推出了自己研制的仿人机器人SDR一3X,2002年又研制出了SDR一4X,见图卜3。日本东京大学也一直在进行仿人机器人的研究,与Kawada工学院合作相继研制成功了H5、H6和H7仿人机器人,其中H6机器人高1.37米,体重55公斤,具有35个自由度,目前正在开发名为Isamu的新一代仿人机器人,其身高1.5米,体重55公斤,具有32个自由度。日本科学技术振兴机构也在从事PINO机器人的研究,PINO高0.75米,采用29个电机驱动,见图卜4。日本Waseda大学一直在从事仿人机器人研究计划,研制的wL系列仿人机器人和WENDY机器人在机器人界有很大的影响,至今已投入100多万美元,仍在研究之中。Tohoku大学研制的Saika3机器人高1.27米,重47公斤,具有30个自由度。美国的MIT和剑桥马萨诸塞技术学院等单位也一直在从事仿人机器人研究。德国、英国和韩国等也有很多单位在进行类似的研究。 图卜1P2机器人图卜2ASIMO机器人图1.3SDR-4X机器人图1-4PINO机器人 图卜5第一代机器人图l-6第二代机器人图1.7第三代机器人图1—8第四代机器人 在国家“863”高技术计划和自然科学基金的资助下,国内也开展了仿人机器人的研究工作。目前,国内主要有国防科技大学、哈尔滨工业大学和北京理工大学等单位从事仿人机器人的研究。国防科技大学机器人实验室研制机器人已有10余年的历史,该实验室在这期间分四阶段推出了四代机器人,其中,2000年底推出的仿人机器入一“先行者”一是国内第一台仿人机器人。2003年6月,又成功研制了一台具有新型机械结构和运动特性的仿人机器人,这台机器人身高1.55米,体重63.5公斤,共有36个自由度,脚踝有力 第2页
提升系统动力学与运动学.(DOC)
第一节矿井提升运动学 一、提升速度图 竖井提升速度图因提升容器的不同一般可分为箕斗提升速度图(六阶段速度图)和罐笼提升速度图(五阶段速度图)。 图5一l所示为常采用的交流拖动双箕斗提升系统六阶段速度图,因它具有六个阶段而得名。速度图表达了提升容器在一个提升循环内的运动规律,现简述如下: 图5-1 箕斗提升六阶段速度图 (1)初加速度阶段t0 提升循环开始,处于井底装载处的箕斗被提起,而处于井口卸载位置的箕斗则沿卸载曲轨下行。为了减少容器通过卸载曲轨时对井架的冲击,对初加速度a0及容器在卸载曲轨内的运行速度v0 。要加以限制,一般取Vo≤1.5 m/s 。 (2)主加速阶段t1 当箕斗离开曲轨时,则应以较大的加速度a1运行,直至达到最大提升速度vm ,以减少加速阶段的运行时间,提高提升效率。 (3)等速阶段t2箕斗在此阶段以最大提升速度v m运行,直至重箕斗将接近井口开始减速时为止。 (4)减速阶段t3重箕斗将要接近井口时,开始以减速度a3运行,实现减速。 (5)爬行阶段t4重箕斗将要进入卸载曲轨时,为了减轻重箕斗对井架的冲击以及有利于准确停车,重箕斗应以低速v4爬行。一般v4=0.4~0.5m/s,爬行距离v4 =2.5~5m。 (6)停车休止阶段t5当重箕斗运行至终点时,提升机施闸停车。处于井底的箕斗进行装载,处于井口的箕斗卸载。箕斗休止时间可参考表5—1。 图5—2所示为双罐笼提升系统五阶段速度图。因为罐笼提升无卸载曲轨,故其速度图中无t0阶段。为了准确停车,罐笼提升仍需有爬行阶段,故罐笼提升的速度图为五阶段速度图。罐笼进出车休止时间参考相应手册。
二、最大提升速度 由式(1-1)计算的经济速度v j ,并不是提升机的最大提升速度v m ,但值尽可能是接近值。而最大提升速度值应如何确定呢?提升机的卷筒是由电动机经减速器拖动的。提升机卷筒圆周的最大速度与电动机额定转数n e 及减速器传动比i 有关,其关系如下式所示: )/(60s m i Dn v e m π= 5-1) 式中:D 为提升机卷筒直径,m ;i 为减速器传动比, n e 为电动机额定转数,r /min 由式(5—1)计算的最大提升速度v m ,因每台提升机所选配的电动机转数的不同和减速器速比的不同而具有有限的几个数值,这有限的几个数值均称为提升机的标准速度—最大提升速度。应该注意的是,选取v m 时,即选择转速n e 和传动比i 时,应使v m 值接近v j 值。其办法可从下列有关的表中查找(各表(见课本)的值是据式(5—1)计算得出的)。 在表中找出与v j 值最接近的v m 值,该值即为确定的提升最大速度——标准速度,这样,即可定出与确定的v m 值相对应的电动机转速和减速器的传动比。 根据式(8—1)得到的标准速度值必须符合《煤矿安全规程》对提升最大速度的有关规定: (1) 竖井中升降物料时,提升容器最大速度不得超过下式算出的数 )/(6.0s m H v m ≤ (5-2) (2)竖井中用罐笼升降人员的最大速度不得超过下式算出的数值,且最大不得超过16m /s 。)/(5.0s m H v m ≤ (5-3)三、提升加速度和减速度的确定
弹性联轴器运动与动力特性
弹性联轴器运动与动力特性 1.1 弹性联轴器的刚度和阻尼 弹性联轴器由于具有能产生较大弹性变形和阻尼作用的弹性元件,因此除能补偿两轴相对位移外,还能起缓冲和吸振的作用。弹性联轴器能适应载荷的波动,所以其应用较广,类型也较多。这种联轴器的缓冲和吸振性能主要与其刚度和阻尼有关。 联轴器的刚度可分为径向刚度、周向刚度和扭转刚度。由于载荷变化多数以扭矩波动形式出现,由此引起的振动也是以扭转振动为主,所以联轴器最主要的刚度是扭转刚度。扭转刚度易产生单位扭转变形所需的扭矩表示。通常,由于传动轴系中其它零件的刚度都比弹性联轴器的刚度大得多。所以为了简化起见,其它零件的弹性可以略去不计。仅考虑联轴器弹性,并根据这一情况以联轴器的刚度作为传动轴系的刚度。 刚度可用下式表示: C=T/(3-1) 式中 T——联轴器传递的扭矩; ——在扭矩作用下两半联轴器的相对扭转角。 当轴系接近发生共振时,刚度随扭矩增大而增大,改变传动轴系的固有频率与振动频率之间的关系,就能避开共振。 弹性联轴器在传递不稳定扭矩的过程中,弹性元件的弹性变形随扭矩的改变而增减。由于变形的不稳定,在弹性元件相对运动的接触表面上产生外摩擦,同时在弹性元件内部还存在内摩擦。这些摩擦将吸收一部分动能转化为热能,使温度升高。这就是联轴器的阻尼作用。阻尼作用能实现缓冲和衰减振动。联轴器的阻尼性能可以用阻尼系数表示。它是每一次载荷循环中产生的阻尼能和储存在扭转弹性元件中的变形能之比,即ф=W d/W e。在振动运动微分方程中,粘滞阻力系数用γ来表示,它与阻尼系 数之间的关系为γ=,ω为振动频率或绕动力矩变化频率。阻尼系数大,由于摩擦而消耗的能量就多,反之,阻尼系数小,由于摩擦而消耗的能量就少。 弹性联轴器一般都有缓冲和吸振功能,但是具有某一定值弹性的联轴器,并不是在任意的变扭矩作用下都能产生减振的效果,有时反而会引起更强烈的振动。其原因不在于此联轴器的刚度大小。可见,只有刚度和整个传动轴系的其他参数和载荷协调时,才能产生减振效果。因此,必须根据课题条件,通过计算来定出联轴器的刚度。 1.2 周期性载荷作用下的动力特性计算 对于某一已定的传动轴系,转动惯量和固有频率可由计算求得,如果已知所传扭矩的变化规律,如振幅和频率等,就能建立起轴系在扭转振动式的运动微分方程,对该方程求解,即可得到所需的联轴器的刚度。 为了便于求解运动微分方程,需要对传动轴系中联轴器的主动和从动两侧的转动惯量和刚度作力学模型的简化。根据具体结构情况,可以将轴系简化为若干个等效转动惯量圆盘,以具有某一刚度的周联系起来。通常比较典型的是简化为两个等效的圆
运动学、动力学知识要点
《直线运动》知识要点 一、基本概念:时间、位移、速度、加速度 位移x ?——路程l 速度v ——平均速度与瞬时速度,速度与速率 加速度a ——t v a ??=??,物理意义 二、基本模型 质点 匀速直线运动 匀变速直线运动(自由落体运动、竖直抛体运动) 三、基本规律(模型草图) 1.匀速直线运动:vt x = 2.匀变速直线运动: at v v ±=0,202 1at t v x ±=,ax v v 2202±=-,220 t v v v v =+=,2aT x =? 3.t v -图象、t x -图象(点、线、面积、斜率、截距) 四、基本方法(过程草图) 比例法——相等时间、相等位移 逆向运动法——末速度为零的匀减速运动,其它 对称法——往返运动(竖直上抛运动) 平均速度法 逐差法 图象法 五、基本实验 打点计时器 纸带法测物体运动的时间、位移、速度(平均速度法)、加速度(图象法、逐差法) 六、难点题型 1.刹车问题——刹车时间 2.追击、相遇问题(草图、图象) (1)相遇问题——同一时刻、同一地点 (2)追击问题——关键:速度相等; 分析:速度相等前后; 结果:相距最近、最远,或能否追上。 *3.相对运动:相对参考系绝对v v v ???+= 七、易错点汇集 1.纸带处理:2naT x x m n m =-+,21234569)()(T x x x x x x a ++-++= 2.矢量性:减速运动或往返运动中,加速度为负值(一般规定出速度方向为正方向) 3.图象问题:用图象解决追击相遇问题 4.答题技巧:抓关键词,统一单位,字母区别 画过程草图,灵活选取公式——平均速度法
运动学、静力学、动力学概念
运动学、静力学、动力学概念 运动学 运动学是理论力学的一个分支学科,它是运用几何学的方法来研究物体的运动,通常不考虑力和质量等因素的影响。至于物体的运动和力的关系,则是动力学的研究课题。 用几何方法描述物体的运动必须确定一个参照系,因此,单纯从运动学的观点看,对任何运动的描述都是相对的。这里,运动的相对性是指经典力学范畴内的,即在不同的参照系中时间和空间的量度相同,和参照系的运动无关。不过当物体的速度接近光速时,时间和空间的量度就同参照系有关了。这里的“运动”指机械运动,即物体位置的改变;所谓“从几何的角度”是指不涉及物体本身的物理性质(如质量等)和加在物体上的力。 运动学主要研究点和刚体的运动规律。点是指没有大小和质量、在空间占据一定位置的几何点。刚体是没有质量、不变形、但有一定形状、占据空间一定位置的形体。运动学包括点的运动学和刚体运动学两部分。掌握了这两类运动,才可能进一步研究变形体(弹性体、流体等)的运动。 在变形体研究中,须把物体中微团的刚性位移和应变分开。点的运动学研究点的运动方程、轨迹、位移、速度、加速度等运动特征,这些都随所选的参考系不同而异;而刚体运动学还要研究刚体本身的转动过程、角速度、角加速度等更复杂些的运动特征。刚体运动按运动的特性又可分为:刚体的平动、刚体定轴转动、刚体平面运动、刚体定点转动和刚体一般运动。 运动学为动力学、机械原理(机械学)提供理论基础,也包含有自然科学和工程技术很多学科所必需的基本知识。 运动学的发展历史 运动学在发展的初期,从属于动力学,随着动力学而发展。古代,人们通过对地面物体和天体运动的观察,逐渐形成了物体在空间中位置的变化和时间的概念。中国战国时期在《墨经》中已有关于运动和时间先后的描述。亚里士多德在《物理学》中讨论了落体运动和圆运动,已有了速度的概念。
机器人机械臂运动学分析(仅供借鉴)
平面二自由度机械臂动力学分析 [摘要] 机器臂是一个非线性的复杂动力学系统。动力学问题的求解比较困难,而且需要较长的运算时间,因此,这里主要对平面二自由度机械臂进行动力学研究。本文采用拉格朗日方程在多刚体系统动力学的应用方法分析平面二自由度机械臂的正向动力学。经过研究得出平面二自由度机械臂的动力学方程,为后续更深入研究做铺垫。 [关键字] 平面二自由度 一、介绍 机器人是一个非线性的复杂动力学系统。动力学问题的求解比较困难,而且需要较长的运算时间,因此,简化解的过程,最大限度地减少工业机器人动力学在线计算的时间是一个受到关注的研究课题。 机器人动力学问题有两类: (1) 给出已知的轨迹点上的,即机器人关节位置、速度和加速度,求相应的关节力矩向量Q r。这对实现机器人动态控制是相当有用的。 (2) 已知关节驱动力矩,求机器人系统相应的各瞬时的运动。也就是说,给出关节力矩向量τ,求机器人所产生的运动。这对模拟机器人的运动是非常有用的。 二、二自由度机器臂动力学方程的推导过程 机器人是结构复杂的连杆系统,一般采用齐次变换的方法,用拉格朗日方程建立其系统动力学方程,对其位姿和运动状态进行描述。机器人动力学方程的具体推导过程如下: (1) 选取坐标系,选定完全而且独立的广义关节变量θr ,r=1, 2,…, n。 (2) 选定相应关节上的广义力F r:当θr是位移变量时,F r为力;当θr是角度变量时, F r为力矩。 (3) 求出机器人各构件的动能和势能,构造拉格朗日函数。 (4) 代入拉格朗日方程求得机器人系统的动力学方程。 下面以图1所示说明机器人二自由度机械臂动力学方程的推导过程。
运动学、动力学知识要点
《直线运动》知识要点 一、基本概念:时间、位移、速度、加速度 位移x ?——路程l 速度v ——平均速度与瞬时速度,速度与速率 加速度a ——t v a ??=??,物理意义 二、基本模型 质点 匀速直线运动 匀变速直线运动(自由落体运动、竖直抛体运动) 三、基本规律(模型草图) 1.匀速直线运动:vt x = 2.匀变速直线运动: at v v ±=0,202 1at t v x ±=,ax v v 2202±=-,220 t v v v v =+=,2aT x =? 3.t v -图象、t x -图象(点、线、面积、斜率、截距) 四、基本方法(过程草图) 比例法——相等时间、相等位移 逆向运动法——末速度为零的匀减速运动,其它 对称法——往返运动(竖直上抛运动) 平均速度法 逐差法 图象法 五、基本实验 打点计时器 纸带法测物体运动的时间、位移、速度(平均速度法)、加速度(图象法、逐差法) 六、难点题型 1.刹车问题——刹车时间 2.追击、相遇问题(草图、图象) (1)相遇问题——同一时刻、同一地点 (2)追击问题——关键:速度相等; 分析:速度相等前后; 结果:相距最近、最远,或能否追上。 *3.相对运动:相对参考系绝对v v v ???+= 七、易错点汇集 1.纸带处理:2naT x x m n m =-+,21234569)()(T x x x x x x a ++-++= 2.矢量性:减速运动或往返运动中,加速度为负值(一般规定出速度方向为正方向) 3.图象问题:用图象解决追击相遇问题 4.答题技巧:抓关键词,统一单位,字母区别 画过程草图,灵活选取公式——平均速度法
车辆动力学相关的软件及特点
SIMPACK车辆动力学习仿真系统 SIMPACK软件是德国INTEC Gmbh公司(于2009年正式更名为SIMPACK AG)开发的针对机械/机电系统运动学/动力学仿真分析的多体动力学分析软件包。它以多体系统计算动力学(Computational Dynamics of Multibody Systems)为基础,包含多个专业模块和专业领域的虚拟样机开发系统软件。SIMPACK软件的主要应用领域包括:汽车工业、铁路、航空/航天、国防工业、船舶、通用机械、发动机、生物运动与仿生等。 SIMPACK是机械系统运动学/动力学仿真分析软件。SIMPACK软件可以分析如:系统振动特性、受力、加速度,描述并预测复杂多体系统的运动学/动力学性能等。 SIMPACK的基本原理就是通过搭建CAD风格的模型(包括铰、力元素等)来建立机械系统的动力学方程,并通过先进的解算器来获取系统的动力学响应。 SIMPACK软件可以用来仿真任何虚拟的机械/机电系统,从仅仅只有几个自由度的简单系统到诸如一个庞大的火车。SIMPACK软件可以应用在我们产品设计、研发或优化的任何阶段。 SIMPACK软件独具有的全代码输出功能可以将我们的模型输出成Fortran或C代码,从而可以实现与任意仿真软件的联合。 车辆动力学仿真carsim CarSim是专门针对车辆动力学的仿真软件,CarSim模型在计算机上运行的速度比实时快3-6倍,可以仿真车辆对驾驶员,路面及空气动力学输入的响应,主要用来预测和仿真汽车整车的操纵稳定性、制动性、平顺性、动力性和经济性,同时被广泛地应用于现代汽车控制系统的开发。CarSim可以方便灵活的定义试验环境和试验过程,详细的定义整车各系统的特性参数和特性文件。 CarSim软件的主要功能如下: 适用于以下车型的建模仿真:轿车、轻型货车、轻型多用途运输车及SUV; 可分析车辆的动力性、燃油经济性、操纵稳定性、制动性及平顺性; 可以通过软件如MATLAB,Excel等进行绘图和分析; 可以图形曲线及三维动画形式观察仿真的结果;包括图形化数据管理界面,车辆模型求解器,绘图工具,三维动画回放工具,功率谱分析模块;程序稳定可靠; CarSim软件可以扩展为CarSim RT, CarSim RT 是实时车辆模型,提供与一些硬件实时系统的接口,可联合进行HIL仿真;
第二章挖掘装置动力学及运动学分析.
第二章挖掘装置运动学及动力学分析 2.1 挖掘装置的结构及工作特点 挖掘装载机反铲工作装置的结构,其基本型式见图 2-1 所示。 图2-1反铲结构简图 工作特点:反铲工作装置主要用于挖掘停机面以下的土壤,其挖掘轨迹决定于各液压缸的运动及其相互配合的情况。当采用动臂液压缸工作进行挖掘时(斗杆、铲斗液压缸不工作可以得到最大的挖掘半径和最大的挖掘行程,此时铲斗的挖掘轨迹系以动臂下铰点 C 为中心,斗齿尖 V 至 C 的距离|CV|为半径而作的圆弧线,其极限挖掘高度和挖掘深度(不是最大挖掘深度,分别决定于动臂的最大上倾角和下倾角(动臂对水平线的夹角,也即决定于动臂液压缸的行程由于这种挖掘方式时间
长,并且稳定条件限制了挖掘力的发挥,实际工作中基本上不采用。 当仅以斗杆液压缸工作进行挖掘时,铲斗的挖掘轨迹系以动臂与斗杆的铰点 F 为中心,斗齿尖 V 至 F 的距离|FV|为半径所作的圆弧线,同样,弧线的长度与包角决定于斗杆液压缸的行程 。当动臂位于最大下倾角时,可以得到最大挖掘深度,并且有较大的挖掘行程,在较硬的土质条件下工作时,能够保证装满铲斗,故中小型挖掘机构在实际工作中常以斗杆挖掘进行工作。 反铲装置如果仅以铲斗液压缸工作进行挖掘时,挖掘轨迹则为以铲斗与斗杆的铰点 Q 为中心,该铰点 Q 至斗齿尖 V 的距离 |QV|为半径所作的圆弧线。同理,圆弧线的包角( 铲斗的转角及弧长决定于铲斗液压缸的行程(|GH|–|GH|)。显然,以铲斗液压缸进行挖掘时的挖掘行程较短,如使铲斗在挖掘行程结束时能够装满土壤,需要有较大的挖掘力以保证能够挖掘较大厚度的土壤。所以,一般挖掘机构的斗齿最大挖掘力都在采用铲斗液压缸工作时实现。用铲斗液压缸进行挖掘常用于清除障碍,挖掘较松软的土壤以提高生产率,因此在一般土方工程机械中(土壤多为Ⅲ级土以下,转斗挖掘最常采用。在实际挖掘中,往往需要采
机械系统动力学作业---平面二自由度机械臂运动学分析
机械系统动力学作业---平面二自由度机械臂运动学分 析 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
平面二自由度机械臂动力学分析 [摘要] 机器臂是一个非线性的复杂动力学系统。动力学问题的求解比较困难,而且需要较长的运算时间,因此,这里主要对平面二自由度机械臂进行动力学研究。本文采用拉格朗日方程在多刚体系统动力学的应用方法分析平面二自由度机械臂的正向动力学。经过研究得出平面二自由度机械臂的动力学方程,为后续更深入研究做铺垫。 [关键字] 平面二自由度机械臂动力学拉格朗日方程 一、介绍 机器人是一个非线性的复杂动力学系统。动力学问题的求解比较困难,而且需要较长的运算时间,因此,简化解的过程,最大限度地减少工业机器人动力学在线计算的时间是一个受到关注的研究课题。 机器人动力学问题有两类: (1) 给出已知的轨迹点上的,即机器人关节位置、速度和加速度,求相应的关节力矩向量Q r。这对实现机器人动态控制是相当有用的。 (2) 已知关节驱动力矩,求机器人系统相应的各瞬时的运动。也就是说,给出关节力矩向量τ,求机器人所产生的运动。这对模拟机器人的运动是非常有用的。 二、二自由度机器臂动力学方程的推导过程 机器人是结构复杂的连杆系统,一般采用齐次变换的方法,用拉格朗日方程建立其系统动力学方程,对其位姿和运动状态进行描述。机器人动力学方程的具体推导过程如下: (1) 选取坐标系,选定完全而且独立的广义关节变量θr ,r=1, 2,…, n。 (2) 选定相应关节上的广义力F r:当θr是位移变量时,F r为力;当θr是角度变量时, F r为力矩。 (3) 求出机器人各构件的动能和势能,构造拉格朗日函数。 (4) 代入拉格朗日方程求得机器人系统的动力学方程。 下面以图1所示说明机器人二自由度机械臂动力学方程的推导过程。
流体力学第三章流体运动学与动力学基础
第三章流体运动学与动力学基础 主要内容 ●基本概念 ●欧拉运动微分方程 ●连续性方程——质量守恒* ●伯努利方程——能量守恒** 重点 ●动量方程——动量守恒** 难点 ●方程的应用 第一节研究流体运动的两种方法 ●流体质点:物理点。是构成连续介质的流体的基本单位,宏观上无穷小(体积非常 微小,其几何尺寸可忽略),微观上无穷大(包含许许多多的流体分子,体现了许 多流体分子的统计学特性)。 ●空间点:几何点,表示空间位置。 流体质点是流体的组成部分,在运动时,一个质点在某一瞬时占据一定的空间点(x,y,z)上,具有一定的速度、压力、密度、温度等标志其状态的运动参数。拉格朗日法以流体质点为研究对象,而欧拉法以空间点为研究对象。 一、拉格朗日法(跟踪法、质点法)Lagrangian method 1、定义:以运动着的流体质点为研究对象,跟踪观察个别流体质点在不同时间其位置、流速和压力的变化规律,然后把足够的流体质点综合起来获得整个流场的运动规律。 2、拉格朗日变数:取t=t0时,以每个质点的空间坐标位置为(a,b,c)作为区别该质点的标识,称为拉格朗日变数。 3、方程:设任意时刻t,质点坐标为(x,y,z) ,则: x = x(a,b,c,t) y = y(a,b,c,t) z = z(a,b,c,t) 4、适用情况:流体的振动和波动问题。 5、优点:可以描述各个质点在不同时间参量变化,研究流体运动轨迹上各流动参量的变化。 缺点:不便于研究整个流场的特性。 二、欧拉法(站岗法、流场法)Eulerian method
1、定义:以流场内的空间点为研究对象,研究质点经过空间点时运动参数随时间的变化规律,把足够多的空间点综合起来得出整个流场的运动规律。 2、欧拉变数:空间坐标(x ,y ,z )称为欧拉变数。 3、方程:因为欧拉法是描写流场内不同位置的质点的流动参量随时间的变化,则流动参量应是空间坐标和时间的函数。 位置: x = x(x,y,z,t) y = y(x,y,z,t) z = z(x,y,z,t) 速度: u x =u x (x,y,z,t ) u y =u y (x,y,z,t ) u z =u z (x,y,z,t ) 同理: p =p (x,y,z,t ) ,ρ=ρ(x,y,z,t) 说明: x 、y 、z 也是时间t 的函数。 加速度: z u u y u u x u u t u a x z x y x x x x ??+??+??+??= z u u y u u x u u t u a y z y y y x y y ??+??+??+??= z u u y u u x u u t u a z z z y z x z z ??+??+??+??= 全加速度=当地加速度+迁移加速度 当地加速度:在一定位置上,流体质点速度随时间的变化率。 迁移加速度:流体质点所在的空间位置的变化而引起的速度变化率。 说明:两种方法具有互换性。但由于欧拉法较简单,且本书着重讨论流场的整体运动特性。所以,采用欧拉法研究问题。 四、流场分类 1、 三元流场:凡具有三个坐标自变量的流场称为三元流场(或三维流场)。 一般来说,速度是三个坐标自变量的函数:V =V (x,y,z,t) 2、二元流场:凡具有两个坐标自变量的流场。 3、一元流场:具有一个坐标自变量的流场。 管截面A=A(l ),若人们研究的是各截面上流动的平均物理参数,则它可以简化为一元流场B=B(l , t)。 k y x j xy i xy u 542 1221+-=——二维流场
张力减径机的动力学和运动学的分析实用版
YF-ED-J6014 可按资料类型定义编号 张力减径机的动力学和运动学的分析实用版 In Order To Ensure The Effective And Safe Operation Of The Department Work Or Production, Relevant Personnel Shall Follow The Procedures In Handling Business Or Operating Equipment. (示范文稿) 二零XX年XX月XX日
张力减径机的动力学和运动学的 分析实用版 提示:该解决方案文档适合使用于从目的、要求、方式、方法、进度等都部署具体、周密,并有很强可操作性的计划,在进行中紧扣进度,实现最大程度完成与接近最初目标。下载后可以对文件进行定制修改,请根据实际需要调整使用。 文章主要对三辊式张力减径机进行分析, 主要分析张力减径机的动力学和运动学原理, 通过对张力减径机的速度分析、转速分析和速 度控制来分析张力减径机运动学特征,通过对 张力减径机受力分析、轧制压力和轧制力矩进 行分析张力减径机的动力学特征分析。 张力减径机是现代化的生产机组,其作用 和优越性使其在大规模无缝钢管生产中不可缺 少。随着我国钢管工业的发展张力减径机组正 被广泛运用。对三辊式张力减径机进行分析,
该机组是90年代研制的,具有许多独特的优点。以下分析张力减径机的运动学和动力学原理。 1.张力减径机的运动学特征 1.1.运动学特征 在张力减径的过程中,要求各个机架的延伸系数和轧辊圆周协调一致,同时决定连轧机工作的基本条件要求通过每个机架的金属的秒流量相等。 在所有的机架都充满金属而C不等于0的情况下,对于每对轧辊在任意瞬间都遵守秒流量、相等的原则,这种相等可通过轧辊和金属之间的滑移达到。因此当C不等于0时,减径机任何一个机架中的变形条件发生变化,都会影响其余机架中的变形条件,但由于连轧过程
质点运动学和动力学习题答案
质点运动学和动力学习题参考答案 一、选择题 1、D 解析:题目只说明质点作直线运动,没有确定是匀加速还是变加速直线运动,故任意时刻的速度都不确定。 2、D 3、C 解析:2t 时间内,质点恰好运动2圈回到初始位置,其位移为0,路程为4πr ,所以其平均速度大小为0,平均速率为2πr/t 。 4、C 解析:有题目可知人与风运动速度可用下图表示,由速度合成得到可知人感受到的风高手刀锋来自西北方向。 5、B 解析:a B =2a A ,对于B 物体有:mg-T=ma B 对于A 物体有2T=ma A 上3式联解得:a B =4g/5 6、A 解析:物体收尾时作匀速运动,则其加速度为零,即mg =kv 2,即得收尾速度为v =(mg /k )1/2。 7、D 解析: 22 tan sin mg mR m l θωωθ== 1 2 2c o s 2l T g π θπω??== ??? 8、A 解析:设绳中张力为T ,则弹簧秤的读数为2T ,因为A 、B 两物体的加速度大小相等,方向相反,可设加速度大小为a ,对A 、B 两物体应用牛顿运动定律m 1g -T =m 1a ,T -m 2g =m 2a ,可得。 二、填空题 1、j 50cos50t i 50sin5t - v +=,a τ=0,a n =250m/s 2,圆; 解析:有运动方程可知:x =10cos5t y =10sin5t ;则其运动轨迹方程为:x 2+y 2=102,所以其轨迹为圆; j 50cos50t i 50sin5t - /dt r d v +==,50v =m/s,所以圆周运动的a τ=0; a n =v 2/r 。 mg T T
ANSYS刚体运动学分析详解
刚体运动学分析 一、前处理 1.创建分析项目 双击主界面Toolbox中的Analysis System>Rigid Dynamics(刚体动力学)选项,在项目管理区创建分析项目A,如图所示。 2.定义材料数据 1)双击项目A中的A2栏Engineering Data项,进入材料参数设置界面,在该界面下即可进行材料参数设置。 2)根据实际工程材料的特性,在Properties of Outline Row 2: Structure Steel表中可以修改材料的特性。 3)关闭A2:Engineering Data,返回到Workbench主界面,材料库添加完毕。 3.添加几何模型 1)在A2栏的Geometry上单击鼠标右键,在弹出的快捷菜单中选择Import Geometry>Browse,此时会弹出“打开”对话框。 2)在弹出的对话框中选择文件路径,导入chap16几何体文件,此时A2栏Geometry后的?变为√,表示实体模型已经存在。 3)单击DM(DesignModeler)界面右上角的“关闭”按钮退出DM,返回到Workbench主界面。 4. 定义零件行为 1)双击主界面项目管理区项目A中的A3栏Model项,进入Mechanical界面,在该界面下即可进行网格的划分、分析设置、结果查看等操作。
2)选择Mechanical界面左侧Outline树结构图中Geometry选项下的所有Solid,在Details of “Solid”中确保所有的Solid对象的Stiffness Behavior(刚度特性)均为Rigid(刚性),如图所示。 5.设置连接 1)查看是否生成了Contact接触,如存在,则全部删除,如图所示。 2)选择Mechanical界面左侧Outline树结构图中的Connections对象,然后在工具箱中选择Body-Ground>Revolute,此时树结构图中出现Revolute对象。 3)设置Revolute对象的细节窗口如图所示,然后单击选择左边实体底部的孔,并在细节窗口中的Scope中单击Apply按钮。 4)按照上面的方法,继续添加Revolute对象。设置Revolute对象的细节窗口如图所示。然后单击选择右边实体底部的孔,并在细节窗口中的Scope中单击Apply按钮。
量子论的运动学与动力学
量子论的运动学与动力学 200890513216号李香文计081-2班 正如大家所知,1927年3月,海森堡在《量子论的运动学与动力学的知觉内容》论文中,提出了量子力学的另一种测不准关系,海森堡认为,科学研究工作宏观领域进入微观领域时,会遇到测量仪器是宏观的,而研究对象是微观的矛盾,在微观世界里,对于质量极小的粒子来说,宏观仪器对微观粒子的干扰是不可忽视的,也是无法控制点额,测量的结果也就同粒子的原来状态不完全相同。所以在微观系统中,不能使用实验手段同时准确的测出微观粒子的位置和动量,时间和能量。由数学推导,海森堡给出了一个测不准关系式:。对于微观粒子一些成对的物理量,在这里指位置和动量,时间和能量,不能同时具有确定的数值,其中一个量愈确定,则另一个就愈不确定。所谓测不准关系,主要是普朗克常量h使量子结果与经典结果有所不同。如果h为零,则对测量没有任何根本的限制,这是经典的观点;如果h很小,在宏观情况下,仍然能以很大的精确性同时测定动量与位置或能量与时间的关系,但是在微观的场合就不能同时测定。实验表明,决定微观系统的未来行为,只能是观察结果所出现的概率,测不准关系已经被认为是微观粒子的客观特性。 海森堡提出了测不准关系后,立即在哥本哈根学派中引起了强烈的反响,泡利欢呼“现在是量子力学的黎明”,玻尔试图从哲学上进行概括。1927年9月,玻尔在与意大利科摩召开的国际物理学会议上提出了著名的“互补原理”,用以解释量子现象基本特征的波粒二象性,它认为量子现象的空间和时间坐标和动量守恒定律,能量守恒定律不能同时在同一个实验中表现出来,而只能在互相排斥的实验条件下出来不能统一与统一图景中,只能用波和粒子这些互相排斥的经典概念来反映。波和粒子这两个概念虽然是互相排斥的,但两者在描写量子现象是却又是缺一不可的。因此玻尔认为他们二者是互相补充的,量子力学就是量子现象的终极理论。“互补原理”实质上是一种哲学原理,称为量子力学的“哥本哈根解释”。30年代后成为量子力学的“正统”解释,波恩称此为“现代科学哲学的顶峰。” 1927年10月在布鲁塞尔第五届索尔卡物理学会议上,量子力学的哥本哈根解释为许多物理学家所接受,同时也受到爱因斯坦等一些人的强烈反对。爱因斯坦为此精心设计了一系列理想实验,企图超越不确定关系的限制来揭露量子力学理论的逻辑矛盾。玻尔和海森堡等人则把量子理论同相对论作比较,有利地驳斥了爱因斯坦。1930年10月第六届索尔卡物理学会议上,爱因斯坦又绞尽脑汁提出了一个“光子箱”的理想实验, 既然在微观状态下,存在测不准关系,那么在宏观状态下,还存在测不准关系吗?这
机器人学第六章(机器人运动学及动力学)
第六章 机器人运动学及动力学 6.1 引论 到现在为止我们对操作机的研究集中在仅考虑动力学上。我们研究了静力位置、静力和速度,但我们从未考虑过产生运动所需的力。本章中我们考虑操作机的运动方程式——由于促动器所施加的扭矩或作用在机械手上的外力所产生的操作机的运动之情况。 机构动力学是一个已经写出很多专著的领域。的确,人们可以花费以年计的时间来研究这个领域。显然,我们不可能包括它所应有的完整的内容。但是,某种动力学问题的方程式似乎特别适合于操作机的应用。特别是,那种能利用操作机的串联链性质的方法是我们研究的天然候选者。 有两个与操作机动力学有关的问题我们打算去解决。向前的动力学问题是计算在施加一 组关节扭矩时机构将怎样运动。也就是,已知扭矩矢量τ,计算产生的操作机的运动Θ、Θ 和Θ 。这个对操作机仿真有用,在逆运动学问题中,我们已知轨迹点Θ、Θ 和Θ ,我们欲求出所需要的关节扭矩矢量τ。这种形式的动力学对操作机的控制问题有用。 6.2 刚体的加速度 现在我们把对刚体运动的分析推广到加速度的情况。在任一瞬时,线速度矢量和角速度矢量的导数分别称为线加速度和角加速度。即 B B Q Q B B Q Q 0V ()V ()d V V lim dt t t t t t ?→+?-==? (6-1) 和 A A Q Q A A Q Q 0()()d lim dt t t t t t ?→Ω+?-ΩΩ=Ω=? (6-2) 正如速度的情况一样,当求导的参坐标架被理解为某个宇宙标架{}U 时我们将用下面的记号 U A AORG V V = (6-3) 和 U A A ω=Ω (6-4)
6.2.1 线加速度 我们从描述当原点重合时从坐标架{}A 看到的矢量B Q 的速度 A A B A A Q B Q B B V V B R R Q =+Ω? (6-5) 这个方程的左手边描述A Q 如何随时间而变化。所以,因为原点是重合的,我们可以重写(6-5)为 A A B A A B B Q B B d ()V dt B B R Q R R Q =+Ω? (6-6) 这种形式的方程式当推导对应的加速度方程时特别有用。 通过对(6-5)求导,我们可以推出当{}A 与{}B 的原点重合时从{}A 中看到的B Q 的 加速度表达式 A A B A A A A Q B Q B B B B d d V (V )()dt dt B B R R Q R Q =+Ω?+Ω? (6-7) 现在用(6-6)两次── 一次对第一项,一次对最后一项。(6-7)式的右侧成为: A B A A A A B Q B B Q B B A A A A B B Q B B V () +Ω?+Ω?+Ω?+Ω? B B B B R R V R Q R V R Q (6-8) 把相同两项合起来 A B A A A A B Q B B Q B B A A A B B B V 2 () +Ω?+Ω?+Ω?Ω? B B B R R V R Q R Q (6-9) 最后,为了推广到原点不重合的情况,我们加上一项给出{}B 的原点的线加速度的项,得到下面的最后的一般公式 A B A A A A BORG B Q B B Q B B A A A B B B V 2 () ++Ω?+Ω?+Ω?Ω? A B B B V R R V R Q R Q (6-10) 对于我们将在本章上考虑的情况,我们总是有B Q 为不变,或 B Q Q V 0== B V (6-11) 所以,(6-10)简化为 A A A A A A Q BORG B B B B B V ()=+Ω?Ω?+Ω? A B B V R Q R Q (6-12) 我们将用这一结果来计算操作机杆件的线加速度。 6.2.2 角加速度 考虑{}B 以A B Ω相对于{}A 转动的情况,而{}C 以B C Ω相对于{}B 转动。为了计算 A C Ω我们把矢量在坐标架{}A 中相加