Laws' Texture Measures Laws图像纹理能量测度算法

Laws' Texture Measures
The texture energy measures developed by Kenneth Ivan Laws at the University of Southern California have been used for many diverse applications. These measures are computed by first applying small convolution kernels to a digital image, and then performing a nonlinear windowing operation. We will first introduce the convolution kernels that we will refer to later.
The 2-D convolution kernels typically used for texture discrimination are generated from the following set of
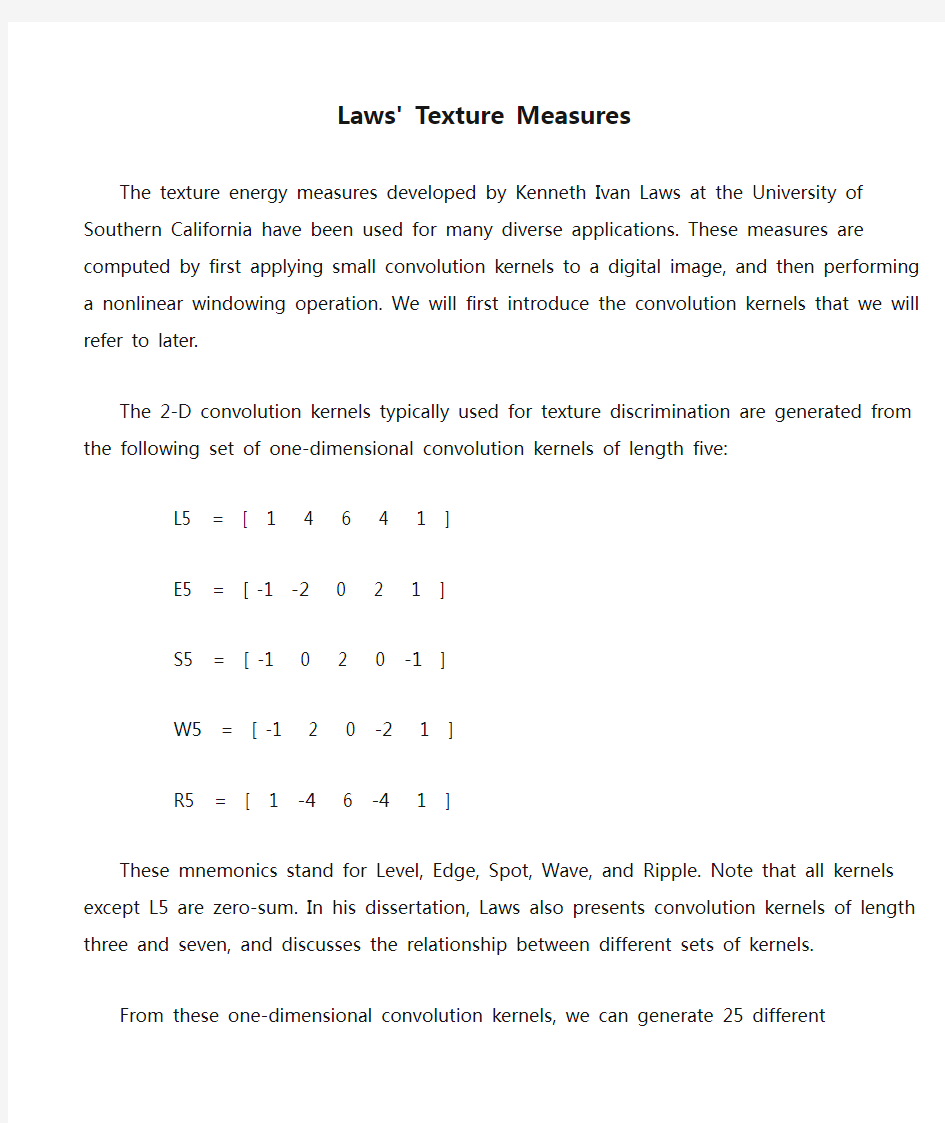
one-dimensional convolution kernels of length five:
L5 = [ 1 4 6 4 1 ]
E5 = [ -1 -2 0 2 1 ]
S5 = [ -1 0 2 0 -1 ]
W5 = [ -1 2 0 -2 1 ]
R5 = [ 1 -4 6 -4 1 ]
These mnemonics stand for Level, Edge, Spot, Wave, and Ripple. Note that all kernels except L5 are zero-sum. In his dissertation, Laws also presents convolution kernels of length three and seven, and discusses the relationship between different sets of kernels.
From these one-dimensional convolution kernels, we can generate 25 different two-dimensional convolution kernels by convolving a vertical 1-D kernel with a horizontal 1-D kernel. As an example, the L5E5 kernel is found by convolving a vertical L5 kernel with a horizontal E5 kernel. Of the 25 two-dimensional convolution kernels that we can generate from the one-dimensional kernels above, 24 of them are zero-sum; the L5L5 kernel is not. A listing of all 5x5 kernel names is given below:
L5L5 E5L5 S5L5 W5L5 R5L5
L5E5 E5E5 S5E5 W5E5 R5E5
L5S5 E5S5 S5S5 W5S5 R5S5
L5W5 E5W5 S5W5 W5W5 R5W5
L5R5 E5R5 S5R5 W5R5 R5R5
The remainder of this document describes how to build up a set of texture energy measures for each pixel in a digital image. This is only a "cookbook" strategy, and therefore most steps are optional.
Step I: Apply Convolution Kernels
Given a sample image with N rows and M columns that we want to perform texture analysis on (i.e. compute texture features at each pixel), we first apply each of our 25 convolution kernels to the image (of course, for certain applications only a subset of all 25 will be used.) The result is a set of 25 NxM grayscale images. These will form the basis for our textural analysis.
Step II: Performing Windowing Operation
We now want to replace every pixel in our 25 NxM separate grayscale images with a Texture Energy Measure (TEM) at the pixel. We do this by looking in a local neighborhood (lets use a 15x15 square) around each pixel and summing together the absolute values of the neighborhood pixels. We generate a new set of images, which we will refer to as the TEM images, during this stage of image processing. The following non-linear filter is applied to each of our 25 NxM images.
7 7 | |
NEW ( x,y ) = SUM SUM | OLD ( x+i,y+j ) |
i =-7 j =-7 | |
Laws also suggests the use of another filter instead of the "absolute value windowing" filter listed above:
( 7 7 )
NEW ( x,y ) = SQRT ( SUM SUM OLD ( x+i,y+j ) ^ 2 )
( i =-7 j =-7 )
We have at this point generated 25 TEM images from our original image. Lets denote these images by the names of the original convolution kernels with an appended ``T'' to indicate that this is a texture energy measure (i.e. the non-linear filtering has been performed). Our TEM images are named:
L5L5T E5L5T S5L5T W5L5T R5L5T
L5E5T E5E5T S5E5T W5E5T R5E5T
L5S5T E5S5T S5S5T W5S5T R5S5T
L5W5T E5W5T S5W5T W5W5T R5W5T
L5R5T E5R5T S5R5T W5R5T R5R5T
Step III: Normalize Features for Contrast
All convolution kernels used thus far are zero-mean with the exception of the L5L5 kernel. In accordance with Laws' suggestions, we can therefore use this as a normalization image; normalizing any TEM image pixel-by-pixel with the L5L5T image will normalize that feature for contrast.
After this is done, the L5L5T image is typically discarded and not used in subsequent textural analysis unless a
``contrast'' feature is desirable.
Step IV: Combine Similar Features
For many applications, ``directionality'' of textures might not be important. If this is the case, then similar features can be combined to remove a bias from the features from dimensionality. For example, L5E5T is sensitive to vertical edges and E5L5T is sensitive to horizontal edges. If we add these TEM images together, we have a single feature sensitive to simple ``edge content''.
Followig this example, features that were generated with transposed convolution kernels are added together. We will denote these new features with an appended ``R'' for ``rotational invariance''.
E5L5TR = E5L5T + L5E5T
S5L5TR = S5L5T + L5S5T
W5L5TR = W5L5T + L5W5T
R5L5TR = R5L5T + L5R5T
S5E5TR = S5E5T + E5S5T
W5E5TR = W5E5T + E5W5T
R5E5TR = R5E5T + E5R5T
W5S5TR = W5S5T + S5W5T
R5S5TR = R5S5T + S5R5T
R5W5TR = R5W5T + W5R5T
To keep all features consistent with respect to size, we can scale the remaining features by 2:
E5E5TR = E5E5T * 2
S5S5TR = S5S5T * 2
W5W5TR = W5W5T * 2
R5R5TR = R5R5T * 2
The result, if we assume we have deleted L5L5T altogether as suggested in Step III, is a set of 14 texture features which are rotationally invariant. If we stack these images up, we get a data set where every pixel is represented by 14 texture features.
References:
?K. Laws. Textured Image Segmentation, Ph.D. Dissertation, University of Southern California, January 1980.
?K. Laws. Rapid texture identification. In SPIE Vol. 238 Image Processing for Missile Guidance, pages 376-380, 1980.
基于颜色直方图的图像检索(实验分析)
基于颜色直方图的图像检索 作者:吴亚平学号:200812017081203009 1.概述 在过去的十几年间,有许多知名机构都对图像检索系统进行了深入的研究,病开发出了相应的检索系统,例如IBM Almaden研究中心研制的QBIC系统,Virage公司研发的VIRAGE系统,麻省理工大学多媒体实验室研发的Photobook系统,哥伦比亚大学研发的VisualSeek系统,斯坦福大学研发的WBIIS系统,U.C.伯克利分校研发的Blobworld系统等等。 这些检索系统的基本特征都是基于图像像素值的特征提取相应的规则图像,例如形状、颜色、纹理等,并以此为依据对图像进行比较检索,在这篇论文中,系统采用了基于颜色特征提取的检索。基于直方图在两个颜色空间对图像特征进行判定检索。这两个颜色空间是RGB和HSV。通过对两副图像对应的RGB和HSV 值计算其距离,依据距离的远近来判断相似性,这种方法简单易行,由于丢弃了图像的形状、颜色、纹理等信息,判定的计算量相对较小。当然这也导致了两副图像之间的判定没有实际的语义上的关联,也就是说,距离相近的图像并不一定有事实上的相应联系。但是,经过试验的判定,这种基于直方图的图像检索系统能够为图片检索提供相对精确的检索结果。 2.相关知识 2.1. RGB颜色空间 RGB颜色模型中每种颜色都是由红绿蓝三种颜色组成。这种颜色模型在许多CRT显示器和彩色光栅图形设备中被广泛使用。这三种颜色被认为是其他颜色的
添加剂,对于所需要的颜色通过对这三种颜色进行不同的比例进行相加即可得到。RGB模型可以用如下的颜色坐标系表示。注意从(0,0,0)到(1,1,1)的对角线,白色代表了灰阶,RGB色彩模式俯视从白色开始的。 2.2. HSV颜色空间(也称HIS颜色空间) HSV字母分别代表了色度(Hue),饱和度(Saturation),色调。上面的锥形图说明HSV的颜色模型。Value代表了颜色的强度,他是从图像信息中分离出来,可以表示相关信息的部分。色度和饱和度代表了颜色在人眼中的生理特征。色度与红色等颜色从0到1的表示不同,色度是从红色通过黄,绿,青,蓝,洋红色,再回到红色。饱和度的区分是从0 到 1,他通过值大小来影响颜色的饱和度。对于色调,也是从0到1,随着他的增大,图像的颜色就会越来越亮。
图像颜色特征提取原理
一、颜色特征 1 颜色空间 1.1 RGB 颜色空间 是一种根据人眼对不同波长的红、绿、蓝光做出锥状体细胞的敏感度描述的基础彩色模式,R、 G、B 分别为图像红、绿、蓝的亮度值,大小限定在 0~1 或者在 0~255。 1.2 HIS 颜色空间 是指颜色的色调、亮度和饱和度,H表示色调,描述颜色的属性,如黄、红、绿,用角度 0~360度来表示;S 是饱和度,即纯色程度的量度,反映彩色的浓淡,如深红、浅红,大小限定在 0~1;I 是亮度,反映可见光对人眼刺激的程度,它表征彩色各波长的总能量,大小限定在 0~1。 1.3 HSV 颜色模型 HSV 颜色模型依据人类对于色泽、明暗和色调的直观感觉来定义颜色, 其中H (Hue)代表色度, S (Saturat i on)代表色饱和度,V (V alue)代表亮度, 该颜色系统比RGB 系统更接近于人们的经验和对彩色的感知, 因而被广泛应用于计算机视觉领域。 已知RGB 颜色模型, 令M A X = max {R , G, B },M IN =m in{R , G,B }, 分别为RGB 颜色模型中R、 G、 B 三分量的最大和最小值, RGB 颜色模型到HSV 颜色模型的转换公式为: S =(M A X - M IN)/M A X H = 60*(G- B)/(M A X - M IN) R = M A X 120+ 60*(B – R)/(M A X - M IN) G= M A X 240+ 60*(R – G)/(M A X - M IN) B = M A X V = M A X 2 颜色特征提取算法 2.1 一般直方图法 颜色直方图是最基本的颜色特征表示方法,它反映的是图像中颜色的组成分布,即出现了哪些颜色以及各种颜色出现的概率。其函数表达式如下: H(k)= n k/N (k=0,1,…,L-1) (1) 其中,k 代表图像的特征取值,L 是特征可取值的个数,n k是图像中具有特征值为 k 的象素的个数,N 是图像象素的总数。由上式可见,颜色直方图所描述的是不同色彩在整幅图像中所占的比例,无法描述图像中的对象或物体,但是由于直方图相对于图像以观察轴为轴心的旋转以及幅度不大的平移和缩放等几何变换是不敏感的,而且对于图像质量的变化也不甚敏感,所以它特别适合描述那些难以进行自动分割的图像和不需要考虑物体空间位置的图像。 由于计算机本身固有的量化缺陷,这种直方图法忽略了颜色的相似性,人们对这种算法进行改进,产生了全局累加直方图法和局部累加直方图法。 2.2 全局累加直方图法 全局累加直方图是以颜色值作为横坐标,纵坐标为颜色累加出现的频数,因此图像的累加直方空间 H 定义为:
图像纹理特征的分析方法研究
图像纹理特征的分析方法研究 黄晶,杨杰 武汉理工大学信息工程学院,武汉(430063) E-mail :jinghuang1019@https://www.360docs.net/doc/8d12462340.html, 摘 要:本文重点介绍了几种借助纹理统计特征的分析方法,并对算法进行了比较。这些方 法包括:基于图像分形维数的特征分析,基于灰度共生矩阵的特征分析,基于灰度直方图的 特征提取。 关键词:分形维数,灰度共生矩阵,纹理特征 中图分类号:TP391 1.引言 虽然存在形形色色的图像纹理,并且人们进行纹理分析方面的工作已近半个世纪,但至 今还没有一个公认的确切的定义。纹理图像在局部区域内可能称不规则性,但在整体上则表 现出某种规律性,其灰度分布往往表现出某种周期性。 就其广义而言,纹理特征就是图像局部性质的统计,一个纹理图像可以看成一组独立的 同分布随机变量(,)W j k 经一空间算子()O ?作用而成的结果(,)F j k ,并用这些数字特征构 造图像的纹理特征。对纹理特征的提取方法可以分为统计法﹑构造法和频谱法。 2.纹理特征的分析方法 2.1 基于分形维数的特征分析 在分形理论中,最经典的理论是Hausdorff 维数[1],它对分形的理论分析和理解都很重 要,但很难直接求取,在实际运用中更多的是盒维数,关联维数,自相似维数以及尺度维数, 本文选取的是盒维数中的差分盒维数。 差分盒维数算法是以盒维数算法为基础提出的一种简单、快速、精确的算法。将M M ×大小的图像分割成L L ×的子块,令r=L/M ,将图像视为一个三维空间中的一个表面 (,,(,))x y f x y ,其中(,)f x y 为图像(,)x y 位置处的灰度值。X ,Y 平面被分割成许多L L ×的网格。在每个网格上,是一列L L h ××的盒子,h 为单个盒子的高度。设总的灰度级为G 。 设在第(,)i j 网格中图像灰度的最小值和最大值分别落在第k 和第l 个盒子中,则: (,)1r n i j l k =?+ (1) 其中r n 是覆盖第(,)i j 网格中的图像所需的盒子数,因而可以求出覆盖整个图像所需的 盒子数r N : ,(,)r r i j N n i j =∑ (2) 则其分形维数log()lim log(1/) r N D r = (3)基于分形维数的特征分析算法: (1)将原图转化为灰度图像; (2)以图像的任意像点(,,(,))i j f i j 为中心选取L L ×大小的窗口计算r n
图像处理和识别中的纹理特征和模型
纹理特征和模型 1,基于纹理谱的纹理特征 图像纹理分析中,最重要的问题是提取能够描述纹理的特征信息;这些特征可被用来分类和描述不同的纹理图像。在实际中常用到的方法有结构法和统计法;本文提出一种新的统计方法,每个纹理单元表征该位置及其领域象素的特征,整幅图像的纹理特征用纹理谱来表征,用这种方法进行分析较为简单。 定义纹理谱:纹理单元的频率分布。 基于纹理频谱的纹理特征: 3×3领域:权重: original reference calculate by myself (1)、黑白对称性 ()(3281) 1*100 () s i S i BWS S i ?? -+ ?? ?? =- ?? ?? ?? ∑ ∑ 反映频谱的对称性,不随纹理单元中起始计数位置的不同而不同。 (2)、几何对称性 ()4() 1 1*100 4 2*() Sj i Sj i GS Sj i ?? -+ ?? ?? =- ?? ?? ?? ∑ ∑ ∑ 反映图像旋转180度后,纹理谱的相似性; (3)、方向度
()()11*10062*()Sm i Sn i DD Sm i ?? -?? ??=-?????? ∑∑ ∑ 反映线性结构的角度。大的DD 说明纹理谱对图像的方向模式较为敏感;即图 像中有线性机构纹理单元存在。 以上三个特征都是图像的几何特征,可描述原始图像的宏观纹理;下面介绍几个描述图像微观纹理的特征。 (4)、方向特征 微观水平结构特征: ()*()MHS S i HM i =∑ ()(,,)*(,,)HM i P a b c P f g h = 同样,我们可以得到其它方向的方向纹理特征MVS ,MDS1,MDS2 (5)中心对称性 2()*[()]CS S i K i =∑ 2.常用统计特征: 把图像看成是一个二维随机过程的一次实现,可得到图像的直方图、均值、方差、偏度、峰度、能量、墒、自相关、协方差、惯性矩、绝对值、反差分等特征量。常用来描述纹理的统计特征的技术有子相关函数、功率谱、正交变换、灰度级同时事件、灰度级行程长、灰度级差分、滤波模板、相对极值密度、离散马尔可夫随机场模型、自回归模型、同时自回归模型等。 原图: 1、2、3、4阶矩
4-基于内容的图像检索
研究生课程 数字图像处理Digital Image Processing 彭宇新 北京大学计算机科学技术研究所E_mail:pengyuxin@https://www.360docs.net/doc/8d12462340.html,
基于内容的图像检索 ●为什么需要基于内容的图像检索? ●查询方式,查询demo,现有系统简介●具体内容 ?特征提取 ?相似度匹配 ?相关反馈 ?索引结构 ●MPEG-7介绍:性能评价等 ●思考的几个问题?
为什么需要基于内容的图像检索? ●当前图像内容的特征 ?海量的图像内容出现 人类已有的:历史、地理、军事、医学… 每天新增的:数码相机、互联网?图像内容的特征:没有索引、目录或摘要 ?怎样找到需要的图像?
●基于文字描述的图像检索 ?丰富的图像内容很难用文字来全面描述 ?文字的选取因人而异,带有很大的主观性 ?耗费大量的人力和时间 ●结论:对于海量的图像,基于人工标注文字的检索已不可能 ●问题:目前搜索引擎提供的基于文字的图像检索,能够解决问题吗?解决得好吗?为什么需要基于内容的图像检索?
●为什么需要基于内容的图像检索(CBIR)? ?提供图像的检索功能 ?不需要人手工标注,计算机自动分析和检索,节省人力和时间 ?使海量图像的管理和索引成为可能 ?存在的问题: 人类高级语义特征与计算机底层特征表示的矛盾 查询方式问题 为什么需要基于内容的图像检索?
基于内容的图像检索 ●为什么需要基于内容的图像检索? ●查询方式,查询demo,现有系统简介●具体内容 ?特征提取 ?相似度匹配 ?相关反馈 ?索引结构 ●MPEG-7介绍:性能评价等 ●思考的几个问题?
图象视觉特征的提取与表示
第1章图像视觉特征的提取和表示 1.1引言 图像视觉特征的提取和表示是将图像的视觉信息转化成计算机能够识别和处理的定量形式的过程,是基于视觉内容的图像分类与检索的关键技术,因此,图像视觉特征的提取和表示一直是图像内容分析领域中一个非常活跃的课题。 图像底层视觉特征一定程度上能够反映图像的内容,可以描述图像所表达的意义,因此,研究图像底层视觉特征是实现图像分类与检索的第一步。一般来说,随着具体应用的不同,选用的底层特征也应有所不同,在特定的具体应用中,不同底层视觉特征的选取及不同的描述方式,对图像分类与检索的性能有很大的影响。通常认为,一种良好的图像视觉特征的提取和表示应满足以下几个要求: (1)提取简单,时间和空间复杂度低。 (2)区分能力强,对图像视觉内容相似的图像其特征描述之间也应相近,反之,对于视觉内容不相似的图像其特征描述之间应有一定的差别。 (3)与人的视觉感知相近,对人的视觉感觉相近的图像其特征描述之间也相近,对人的视觉感知有差别的图像其特征描述之间也有一定的差别。 (4)抗干扰能力强,鲁棒性好,对图像大小,方向不敏感,具有几何平移,旋转不变性。 本章重点讨论当前比较成熟的特征提取方法,在此基础上选取合适的特征提取方法,用于图像分类与检索系统的特征提取模块。接下来,将依次介绍颜色,纹理,形状等特征的提取和表示方法,最后对各种特征的特点加以比较。 1.2颜色特征的提取和表示 颜色是图像视觉信息的一个重要特征,是图像分类与检索中最为广泛应用的特征之一。一般来说同一类别的图像之间颜色信息具有一定的相似性,不同类别的图像,其颜色信息具有一定的差异。相对几何特征而言,颜色特征稳定性好,有对大小、方向不敏感等特点。因此,颜色特征的提取受到极大重视并得到深入研究。本章首先介绍几种常用的颜色空间模型,然后介绍各种颜色特征提取和表示方法。 1.2.1颜色空间模型 为了正确地使用颜色这一特征,需要建立颜色空间模型,通常的颜色空间模型可用三个基本量来描述,所以建立颜色空间模型就是建立一个3-D坐标系,其中每个空间点都代表某一种颜色。通常来说,对于不同的应用,应该选取不同的颜色空间模型。常用的颜色空间模型主要有:RGB、HIS、HSV、YUV、YIQ、Munsell、Lu*v*和La*b*等。颜色空间模型的选取需要符合一定的标准,下面就这一标准和最常用的颜色空间模型作一些介绍。 文献[错误!未找到引用源。]中介绍了选择颜色空间模型的标准主要有以下几个: (1)观察角度的鲁棒性
图像特征提取总结
图像常见特征提取方法简介 常用的图像特征有颜色特征、纹理特征、形状特征、空间关系特征。 一、颜色特征 (一)特点:颜色特征是一种全局特征,描述了图像或图像区域所对应的景物的表面性质。一般颜色特征是基于像素点的特征,此时所有属于图像或图像区域的像素都有各自的贡献。由于颜色对图像或图像区域的方向、大小等变化不敏感,所以颜色特征不能很好地捕捉图像中对象的局部特征。另外,仅使用颜色特征查询时,如果数据库很大,常会将许多不需要的图像也检索出来。颜色直方图是最常用的表达颜色特征的方法,其优点是不受图像旋转和平移变化的影响,进一步借助归一化还可不受图像尺度变化的影响,基缺点是没有表达出颜色空间分布的信息。 (二)常用的特征提取与匹配方法 (1)颜色直方图 其优点在于:它能简单描述一幅图像中颜色的全局分布,即不同色彩在整幅图像中所占的比例,特别适用于描述那些难以自动分割的图像和不需要考虑物体空间位置的图像。其缺点在于:它无法描述图像中颜色的局部分布及每种色彩所处的空间位置,即无法描述图像中的某一具体的对象或物体。 最常用的颜色空间:RGB颜色空间、HSV颜色空间。 颜色直方图特征匹配方法:直方图相交法、距离法、中心距法、参考颜色表法、累加颜色直方图法。 (2)颜色集 颜色直方图法是一种全局颜色特征提取与匹配方法,无法区分局部颜色信息。颜色集是对颜色直方图的一种近似首先将图像从RGB颜色空间转化成视觉均衡的颜色空间(如HSV 空间),并将颜色空间量化成若干个柄。然后,用色彩自动分割技术将图像分为若干区域,每个区域用量化颜色空间的某个颜色分量来索引,从而将图像表达为一个二进制的颜色索引集。在图像匹配中,比较不同图像颜色集之间的距离和色彩区域的空间关系 (3)颜色矩 这种方法的数学基础在于:图像中任何的颜色分布均可以用它的矩来表示。此外,由于颜色分布信息主要集中在低阶矩中,因此,仅采用颜色的一阶矩(mean)、二阶矩(variance)和三阶矩(skewness)就足以表达图像的颜色分布。 (4)颜色聚合向量 其核心思想是:将属于直方图每一个柄的像素分成两部分,如果该柄内的某些像素所占据的连续区域的面积大于给定的阈值,则该区域内的像素作为聚合像素,否则作为非聚合像素。(5)颜色相关图 二纹理特征 (一)特点:纹理特征也是一种全局特征,它也描述了图像或图像区域所对应景物的表面性质。但由于纹理只是一种物体表面的特性,并不能完全反映出物体的本质属性,所以仅仅利用纹理特征是无法获得高层次图像内容的。与颜色特征不同,纹理特征不是基于像素点的特征,它需要在包含多个像素点的区域中进行统计计算。在模式匹配中,这种区域性的特征具有较大的优越性,不会由于局部的偏差而无法匹配成功。作为一种统计特征,纹理特征常具有旋转不变性,并且对于噪声有较强的抵抗能力。但是,纹理特征也有其缺点,一个很明显的缺点是当图像的分辨率变化的时候,所计算出来的纹理可能会有较大偏差。另外,由于有可能受到光照、反射情况的影响,从2-D图像中反映出来的纹理不一定是3-D物体表面真实
基于颜色特征的图像检索算法的实现
目录 摘要 (1) 关键字 (1) 1绪论 (1) 1.1 基于内容的图像检索的概念 (1) 1.2 基于内容的图像检索的发展历史 (1) 1.3 基于内容的图像检索的特点和主要应用 (1) 1.4 基于内容的图像检索的关键技术 (2) 1.5 国内外研究现状 (3) 1.5.1 国外研究现状 (3) 1.5.2 国内研究现状 (4) 2 基于颜色特征的图像检索方法 (4) 2.1 颜色度量体系 (4) 2.2 颜色空间 (5) 2.2.1 RGB颜色空间 (5) 2.2.2 HSV颜色空间 (5) 2.2.3 CMY颜色空间 (6) 3 颜色特征的表达 (7) 3.1 颜色直方图 (7) 3.2 累加直方图 (8) 4 图像特征的相似性匹配 (9) 4.1 距离度量方法 (9) 4.2直方图的交集的方法 (9) 4.3 欧式距离法 (9) 5 图像检索算法实现 (10) 5.1程序开发运行环境 (10) 5.2 程序检索逻辑 (10) 5.3 算法具体实现 (11) 5.4 实例演示 (14) 6 全文总结与展望 (15) 6.1 全文总结 (15) 6.2 展望 (15) 致谢 (15) 参考文献 (16) 英文摘要 (16)
基于颜色特征的图像检索算法的实现 摘要:文章介绍了一种基于颜色特征的图像检索技术的算法并给出了程序实现。首先介绍了基于内容的图像检索技术、发展历史及基于内容的图像检索技术的特点和主要应用,并在此基础上探讨了该领域所用到的一些关键技术。文章着重探讨了图像的颜色空间、图像特征提取及图像相似性度量等内容,并利用matlab技术实现了一个简单图像检索的程序。文章最后则对当前基于内容图像检索技术研究热点和今后的发展方向进行简单的阐述。 关键字:基于内容的图像检索;颜色特征;颜色直方图;相似度度量方法 1 绪论 1.1 基于内容的图像检索的概念 基于内容的图像检索[1](Content Based Image Retrieval, CBIR)是一项从图像数据库中找出与检索式内容相似的图像的检索技术。它利用从图像中自动抽取出来的底层特征,如颜色、纹理、轮廓和形状等特征,进行计算和比较,检索出符合用户需求的结果图像集。目前图像检索系统技术实现的基础是对底层特征信息的计算和比较,也即是“视觉相似”。 1.2 基于内容的图像检索的发展历史 图像检索技术的发展[2]可以分为两个阶段,第一阶段始于70年代,当时的图像检索是通过人工的标注来实现的,随着计算机技术和通信网技术的发展,特别是因特网的快速发展,图像数据的容量越来越大了,这种“以关键字找图”的方法越来越不适应检索技术的发展了。由于图像内容的丰富内涵以及人们对图像内容进行抽象时的主观性不同的人对同一幅图像有不同的理解,这就引入了主观多义,不利于检索。为了克服文本标注检索的弊端,90年代研究者提出了基于内容的图像检索,其方法是:根据图像的颜色特征、纹理特征、形状特征以及空间关系等作为索引,计算查询图像和目标图像之间的相似距离,然后按相似度匹配进行检索,这种技术很大程度地利用了人们的视觉客观特性,避免不同人对图像主观理解的不同而达不到理想的搜索效果。从研究方向的层面来看,基于内容的图像检索可分为三层:第一层是根据图像的底层特性来进行检索,如颜色、纹理,形状等等,涉及图像信息处理、图像分析和相似性匹配技术;第二层是基于图像对象语义,如图像中实体及实体之间的拓扑关系的检索,对象级检索技术建立在下层特征基础上,并引入了对象模型库、对象识别和人工智能等图像理解技术;第三层是基于图像的抽象属性如行为语义,情感语义和场景语义的推理学习来进行检索。需要用到知识库和更加有效的人工智能和神经网络技术。这三个层次由低到高,与人的认知接近,下一个层次通常包含了比上一个层次更高级的语义,更高层的语义往往通过较低层的语义推理获得。尽管经过了多年的研究,较为成熟的基于内容的图像检索技术目前仍处于底层水平,由于底层研究是上层研究的基础,为了给上层建立准确、有效的图像特征提取方法,底层的研究仍在不断的发展。 1.3 基于内容的图像检索的特点和主要应用 基于内容的图像检索技术有以下特点[3]: 一是它突破了传统的基于表达式检索的局限,从媒体内容中提取信息线索。
图像纹理特征总体描述
图像纹理特征总体简述 纹理是一种反映图像中同质现象的视觉特征,它体现了物体表面的具有缓慢变化或者周期性变化的表面结构组织排列属性。纹理具有三大标志: ?某种局部序列性不断重复; ?非随机排列; ?纹理区域内大致为均匀的统一体; 不同于灰度、颜色等图像特征,纹理通过像素及其周围空间邻域的灰度分布来表现,即局部纹理信息。另外,局部纹理信息不同程度上的重复性,就是全局纹理信息。 纹理特征体现全局特征的性质的同时,它也描述了图像或图像区域所对应景物的表面性质。但由于纹理只是一种物体表面的特性,并不能完全反映出物体的本质属性,所以仅仅利用纹理特征是无法获得高层次图像内容的。与颜色特征不同,纹理特征不是基于像素点的特征,它需要在包含多个像素点的区域中进行统计计算。在模式匹配中,这种区域性的特征具有较大的优越性,不会由于局部的偏差而无法匹配成功。 在检索具有粗细、疏密等方面较大差别的纹理图像时,利用纹理特征是一种有效的方法。但当纹理之间的粗细、疏密等易于分辨的信息之间相差不大的时候,通常的纹理特征很难准确地反映出人的视觉感觉不同的纹理之间的差别。例如,水中的倒影,光滑的金属面互相反射造成的影响等都会导致纹理的变化。由于这些不是物体本身的特性,因而将纹理信息应用于检索时,有时这些虚假的纹理会对检索造成“误导”。
一. 纹理特征的特点 ?优点: ?包含多个像素点的区域中进行统计计算; ?常具有旋转不变性; ?对于噪声有较强的抵抗能力; ?缺点: ?当图像的分辨率变化的时候,所计算出来的纹理可能会有较大偏差; ?有可能受到光照、反射情况的影响; ?从2-D图像中反映出来的纹理不一定是3-D物体表面真实的纹理; 二. 纹理特征分类 1. 基本说明
第6章 纹理描述与识别
第6章 纹理描述与识别 纹理是图像的重要视觉特征,是物体表面颜色或亮度规律性分布或变化的重要性质。有关纹理的概念在人们心理中自然形成,但很难用确切的语言或文字描述,因而在自然语言中有较少的纹理描述词。目前对纹理虽然没有准确的定义,但数学上的描述已有一些有效的方法,如Tamura 参数、亮度共生矩阵、随机场模型、小波变换等。这些方法试图利用统计、变换、识别等方法,描述纹理的空间、频域和结构性质,因此,纹理的描述方法可分为统计法、频谱法和结构法。纹理识别就是利用各种纹理描述参数识别纹理结构或纹理性质。 6.1 图像纹理的描述方法 6.1.1 Tamura 纹理特征提取 基于人类对纹理的视觉感知心理学研究,Tamura 等人提出了纹理特征的6个特征参数:粗糙度(coarseness)、对比度(contrast)、方向度(directionality)、线像度(linelikeness)、规整度(regularity)和粗略度(roughness)。其中,前三项用的最多,定义如下: 1.粗糙度 粗糙度指图像纹理变化的粒度。当图像的纹理变化间隔较大时,图像给人的感觉比较粗糙;当图像的纹理变化间隔很小时,图像给人的感觉比较细腻,也就是粗糙度较小。粗糙度与图像的分辨率有关,分辨率大,纹理元尺度大,重复次数少,则图像比较粗糙。 粗糙度是纹理最本质的特性,计算方法可以按以下几个步骤进行。 (1)计算图像中每个像素在2k *2k 邻域内的平均亮度,即: ∑∑ -+-=-+-=----= 1221 2221111 2/),(),(k k k k x x i y y j k k j i g y x A 其中k=0,1,2,…,5,g(i,j)是图像中(i,j)点的像素亮度值。 (2)对于每个像素,在水平和垂直方向上分别计算不同尺度的互不重叠的窗口之间的平均亮度差,即: |),2(),2(|),(11,y x A y x A y x E k k k k h k ----+=
Gabor纹理特征
利用Gabor滤波器组提取图像纹理特征 本部分将包含以下四个方面:纹理特征提取方法综述、Gabor滤波器简介、Gabor滤波器组实现纹理特征提取的步骤与实现、存在的问题与改进策略。 1、纹理特征提取方法综述[1] 纹理没有准确的定义,但对纹理认识的共识是:①纹理不同于灰度和颜色等图像特征,它通过像素及其周围空间邻域的灰度分布来表现,即局部纹理信息;②局部纹理信息不同程度的重复性,即全局纹理信息。 按照纹理特征提取方法所基于的基础理论和研究思路的不同,并借鉴非常流行的Tuceryan和Jain的分类方法,将纹理特征提取方法分为四大家族:统计家族、模型家族、信号处理家族和结构家族。 统计家族的方法是基于像元及其邻域的灰度属性,研究纹理区域中的统计特性,或像元及其邻域内的灰度的一阶、二阶或高阶统计特性;在模型家族中,假设纹理是以某种参数控制的分布模型方式形成的,从纹理图像的实现来估计计算模型参数,以参数为特征或采用某种分类策略进行图像分割,因此模型参数的估计是该家族方法的核心问题;信号处理的方法是建立在时、频分析与多尺度分析基础之上,对纹理图像中某个区域内实行某种变换后,再提取保持相对平稳的特征值,以此特征值作为特征表示区域内的一致性以及区域间的相异性;结构家族的方法基于“纹理基元”分析纹理特征,着力找出纹理基元,认为纹理由许多纹理基元构成,不同类型的纹理基元、不同的方向及数目等,决定了纹理的表现形式。信号处理家族的方法从变换域提取纹理特征,其他3个家族直接从图像域提取纹理特征。各个家族的方法既有区别,又有联系。 利用Gabor滤波器组提取图像纹理特征,如图所示,可以归结为信号处理家族中小波方法的一个分支。
图像纹理检测与特征提取技术研究综述
龙源期刊网 https://www.360docs.net/doc/8d12462340.html, 图像纹理检测与特征提取技术研究综述 作者:李秀怡 来源:《中国管理信息化》2017年第23期 [摘要] 图像纹理作为图像数据的重要信息,是符合人类视觉特征的重要信息之一。纹理 检测与特征提取是纹理分类与分割的基础前提,可以应用到医疗、工业、农业、天文等多个领域,也是近几十年来一个经久不衰的热点研究。随着图像处理领域各种技术的发展,纹理特征分析提取方法也得到不断创新。文章在对相关文献进行调研的基础上,叙述了纹理特征提取方法的发展历程及研究现状,并重点对近十年纹理特征提取方法进行了论述,最后指出了该领域的发展趋势及问题。 [关键词] 图像纹理;特征提取;小波;支持向量机 doi : 10 . 3969 / j . issn . 1673 - 0194 . 2017. 23. 088 [中图分类号] TP311 [文献标识码] A [文章编号] 1673 - 0194(2017)23- 0175- 04 1 引言 随着大数据时代的到来,相对于一般数据,图像信息作为一种更直观更形象的数据表现形式,其应用已经深入到医学、工业、航空、农业等各行业领域中。而纹理作为图像的重要特征之一,可以充分反映图像的整体特征,因此也成为了诸多图像后处理技术所必备的研究条件。但是,纹理的复杂多样性使得研究者们对其分析和准确识别是非常困难。而解决这个困难的方法之一是对图像提取纹理,然后对提取的纹理进行分析研究。这也是模式识别、图像检索、和计算机视觉等研究的基础。在纹理研究的每个阶段内,随着国内外学者研究对图像纹理提取模型及算法的不断创新,以及纹理提取的广泛的应用价值,促使着大家对这一领域进行更深入的研究。 2 纹理的基本定义及特性 目前,人们对纹理的精确定义还没有完全统一,当前几个类别的定义基本上按不同的应用类型形成相对的定义。一般认为,纹理是图像色彩或者灰度在空间上的重复或变化形成纹理。通常,人们将组成纹理的基本单元称为纹理基元或纹元(texture element)。 尽管关于纹理的定义尚未统一,但人们对纹理信息所具有的如下特性达成共识: (1)纹理基元是纹理存在的基本元素,并一定是按照某种规律排列组合形成纹理;(2)纹理信息具有局部显著性,通常可以表现为纹理基元序列在一定的局部空间重复出现;(3)纹理有周期性、方向性、密度、强度和粗糙程度等基本特征,而与人类视觉特征相一致的周期
基于颜色特征的图像检索
基于颜色特征的图像检索
摘要 随着多媒体及网络技术的发展,互联网中的图像等多媒体信息的数量在迅速增加。如何在庞大的多媒体数据资源海洋中搜索到自己所需要的图像,随之成为一个函待解决的问题。近年来基于内容的图像检索技术己经成为了研究的热点,该技术具有传统文本检索方式所无法比拟的优越性,目前已被应用于多媒体通信、生物识别、知识产权保护等方面,具有广阔的发展前景。 本课题设计了基于颜色特征的图像检索系统,该系统主要包括两个关键步骤:颜色特征的提取和相似度匹配。本文中首先采用应用广泛的HSV颜色空间来表示图像的颜色特征,对颜色分量进行非等间隔量化形成特征矢量;然后用欧式距离度量函数进行图像的相似性匹配;最后在MATLAB平台下编程实现了基于颜色特征的检索系统。根据用户输入的样本图像与图像库中的图像进行特征匹配,找出与样本图像距离比较小的若干幅图像,并按照图像之间的距离由小到大的顺序显示给用户。 关键词:图像检索;直方图;颜色特征;MATLAB I
ABSTRACT With the development of multimedia technology, In Internet the number of images and other multimedia information in the rapidly increasing. How to locate the useful image in the vast multi-media is a great technology problem. In recent years, Content-based image retrieval has become a research focus, the technology has the superiority which the traditional text retrieval methods can not match.It has been widely used in multimedia communications, biometrics, intellectual property protection and so on, and has broad prospeets for development. This topic is designed based Color Image Retrieval System, which includes two key steps: color feature extraction and similarity matching. In this article was first used widely HSV color space to represent color feature image. We carried out color components quantification of non-interval to form feature vector; Then use the Euclidean distance metric function to match the similarity function of the image. Finally, this system should be implemented under the platform of the MATLAB by programming. Under user input sample image to conduct feature matching with image which in library images. In this system, It also can identify the images that have a short distance to the sample images, And in accordance with the distance between the images displayed to the user in the order from small to big. Keywords:Image Retrieval;Histogram Algorithm;Color Features;MATLAB II
图像特征提取总结
图像常见xx方法简介 常用的图像特征有颜色特征、纹理特征、形状特征、空间关系特征。 一、颜色特征 (一)特点: 颜色特征是一种全局特征,描述了图像或图像区域所对应的景物的表面性质。 一般颜色特征是基于像素点的特征,此时所有属于图像或图像区域的像素都有各自的贡献。 由于颜色对图像或图像区域的方向、大小等变化不敏感,所以颜色特征不能很好地捕捉图像中对象的局部特征。另外,仅使用颜色特征查询时,如果数据库很大,常会将许多不需要的图像也检索出来。颜色直方图是最常用的表达颜色特征的方法,其优点是不受图像旋转和平移变化的影响,进一步借助归一化还可不受图像尺度变化的影响,基缺点是没有表达出颜色空间分布的信息。 (二)常用的xx与匹配方法 (1)颜色直方图 其优点在于: 它能简单描述一幅图像中颜色的全局分布,即不同色彩在整幅图像中所占的比例,特别适用于描述那些难以自动分割的图像和不需要考虑物体空间位置的图像。其缺点在于: 它无法描述图像中颜色的局部分布及每种色彩所处的空间位置,即无法描述图像中的某一具体的对象或物体。 最常用的颜色空间: RGB颜色空间、HSV颜色空间。 颜色直方图特征匹配方法:
直方图相交法、距离法、中心距法、参考颜色表法、累加颜色直方图法。 (2)颜色集 颜色直方图法是一种全局颜色特征提取与匹配方法,无法区分局部颜色信息。颜色集是对颜色直方图的一种近似首先将图像从RGB颜色空间转化成视觉均衡的颜色空间(如HSV空间),并将颜色空间量化成若干个柄。然后,用色彩自动分割技术将图像分为若干区域,每个区域用量化颜色空间的某个颜色分量来索引,从而将图像表达为一个二进制的颜色索引集。 在图像匹配中,比较不同图像颜色集之间的距离和色彩区域的空间关系 (3)颜色矩 这种方法的数学基础在于: 图像中任何的颜色分布均可以用它的矩来表示。此外,由于颜色分布信息主要集中在低阶矩中,因此,仅采用颜色的一阶矩(mean)、二阶矩(variance)和三阶矩(skewness)就足以表达图像的颜色分布。 (4)颜色聚合向量 其核心思想是: 将属于直方图每一个柄的像素分成两部分,如果该柄内的某些像素所占据的连续区域的面积大于给定的阈值,则该区域内的像素作为聚合像素,否则作为非聚合像素。 (5)颜色相关图 二纹理特征 (一)特点: 纹理特征也是一种全局特征,它也描述了图像或图像区域所对应景物的表面性质。但由于纹理只是一种物体表面的特性,并不能完全反映出物体的本质属性,所以仅仅利用纹理特征是无法获得高层次图像内容的。与颜色特征不同,纹理特征不是基于像素点的特征,它需要在包含多个像素点的区域中进行
图像特征提取方法
图像特征提取方法 摘要 特征提取是计算机视觉和图像处理中的一个概念。它指的是使用计算机提取图像信息,决定每个图像的点是否属于一个图像特征。特征提取的结果是把图像上的点分为不同的子集,这些子集往往属于孤立的点、连续的曲线或者连续的区域。 至今为止特征没有万能和精确的图像特征定义。特征的精确定义往往由问题或者应用类型决定。特征是一个数字图像中“有趣”的部分,它是许多计算机图像分析算法的起点。因此一个算法是否成功往往由它使用和定义的特征决定。因此特征提取最重要的一个特性是“可重复性”:同一场景的不同图像所提取的特征应该是相同的。 特征提取是图象处理中的一个初级运算,也就是说它是对一个图像进行的第一个运算处理。它检查每个像素来确定该像素是否代表一个特征。假如它是一个更大的算法的一部分,那么这个算法一般只检查图像的特征区域。作为特征提取的一个前提运算,输入图像一般通过高斯模糊核在尺度空间中被平滑。此后通过局部导数运算来计算图像的一个或多个特征。 常用的图像特征有颜色特征、纹理特征、形状特征、空间关系特征。当光差图像时,常 常看到的是连续的纹理与灰度级相似的区域,他们相结合形成物体。但如果物体的尺寸很小 或者对比度不高,通常要采用较高的分辨率观察:如果物体的尺寸很大或对比度很强,只需 要降低分辨率。如果物体尺寸有大有小,或对比有强有弱的情况下同事存在,这时提取图像 的特征对进行图像研究有优势。 常用的特征提取方法有:Fourier变换法、窗口Fourier变换(Gabor)、小波变换法、最 小二乘法、边界方向直方图法、基于Tamura纹理特征的纹理特征提取等。
设计内容 课程设计的内容与要求(包括原始数据、技术参数、条件、设计要求等):一、课程设计的内容 本设计采用边界方向直方图法、基于PCA的图像数据特征提取、基于Tamura纹理特征的纹理特征提取、颜色直方图提取颜色特征等等四种方法设计。 (1)边界方向直方图法 由于单一特征不足以准确地描述图像特征,提出了一种结合颜色特征和边界方向特征的图像检索方法.针对传统颜色直方图中图像对所有像素具有相同重要性的问题进行了改进,提出了像素加权的改进颜色直方图方法;然后采用非分割图像的边界方向直方图方法提取图像的形状特征,该方法相对分割方法具有简单、有效等特点,并对图像的缩放、旋转以及视角具有不变性.为进一步提高图像检索的质量引入相关反馈机制,动态调整两幅图像相似度中颜色特征和方向特征的权值系数,并给出了相应的权值调整算法.实验结果表明,上述方法明显地优于其它方法.小波理论和几个其他课题相关。所有小波变换可以视为时域频域的形式,所以和调和分析相关。所有实际有用的离散小波变换使用包含有限脉冲响应滤波器的滤波器段(filterbank)。构成CWT的小波受海森堡的测不准原理制约,或者说,离散小波基可以在测不准原理的其他形式的上下文中考虑。 通过边缘检测,把图像分为边缘区域和非边缘区域,然后在边缘区域内进行边缘定位.根据局部区域内边缘的直线特性,求得小邻域内直线段的高精度位置;再根据边缘区域内边缘的全局直线特性,用线段的中点来拟合整个直线边缘,得到亚像素精度的图像边缘.在拟合的过程中,根据直线段转角的变化剔除了噪声点,提高了定位精度.并且,根据角度和距离区分出不同直线和它们的交点,给出了图像精确的矢量化结果 图像的边界是指其周围像素灰度有阶跃变化或屋顶变化的那些像素的集合,边界广泛的存在于物体和背 景之间、物体和物体之间,它是图像分割所依赖的重要特征.边界方向直方图具有尺度不变性,能够比较好的 描述图像的大体形状.边界直方图一般是通过边界算子提取边界,得到边界信息后,需要表征这些图像的边 界,对于每一个边界点,根据图像中该点的梯度方向计算出该边界点处法向量的方向角,将空间量化为M级, 计算每个边界点处法向量的方向角落在M级中的频率,这样便得到了边界方向直方图. 图像中像素的梯度向量可以表示为[ ( ,),),( ,),)] ,其中Gx( ,),),G ( ,),)可以用下面的
毕业设计(论文)-基于颜色特征的图像检索方法研究与实现
本科毕业论文 (科研训练、毕业设计) 题目:基于颜色特征的图像检索 方法研究与实现 姓名: 学院:信息科学与技术 系:计算机 专业:计算机 年级:2004 学号:04120074 指导教师(校内):职称:教授 指导教师(校外)职称: 年月日
基于颜色特征的图像检索方法研究与实现 【摘要】本文介绍了一个基于改进的加权颜色直方图的图象检索系统。 本系统通过将基于改进的加权的局域颜色直方图的图像检索方法和全局直方图的图像检索方法相结合,提高查全率和查准率。其中,基于分块局域直方图的检索方法利用了图像中间部分的重要性,将图像平均划分成3×3个子块,取中间一块的图像,计算其与参考位图相应位置的颜色特征距离,再计算原图的颜色直方图与参考位图的颜色特征距离,分别赋予权值后得出的值就是图像之间内容的相似程度。本文引入欧氏距离的相似性度量方法实现图像检索。实验表明,该方法具有较好的查全率和查准率。 【关键字】图像检索,颜色特征,颜色直方图,相似性度量方法
CONTENT-BASED IMAGE RETRIEV AL SYSTEM LEARN AND REALIZATION ABSTRACT This image retrieval system is based on a improved weighted color histogram. With combining the improved image retrieval algorithem of based on the weighted central-block color histogram and the image retrieval algorithem of overall histogram, the recall rate and the rate of search is improved . Using the importance of the image of the middle part, the retrieval method based on the block local histogram divide a picture into an average o f 3 × 3 sub-blocks. Choose the middle one , calculate the colour feature distance between the middle block of original image and the middle block of reference image .Then calculate the colour feature distance between the original image and reference image. Weighted with fixed value , we can get the similarity between them. We introduce the Euclidean distance measurement methods to achieve similar image retrieval. The experiments show that the method has a better recall rate and the rate of search. Keywords: Image Retrieval, features of color,color histogram, similar methods of measurement