LATTICE_配置问题
摘要:介绍一种利用微控制器动态配置CPLD器件的方法。将配置文件存放在存储器中,配置文件中的控制代码驱动在微处理器中运行的配置引擎;将配置文件中的配置信息通过JTAG口移入CPLD,实现器件的动态配置;通过更换存储器中配置文件,达到同一器件实现不同功能的目的。这种方法为嵌入式系统升通读重构提供了一种新的思路,将来一定会得到广泛应用。
关键词:ISP 在系统可编程技术动态配置 CPLD
引言
随着应用的不断深入,嵌入式系统升级的问题摆在了人们面前。在这种背景下ISP技术应运而生。
在系统可编程ISP(In Ststem Programmability)技术是指能对器件、电路甚至整个系统进行现场升级和功能重构的技术。这种重构可以在实验开发过程中、制造过程中,甚至是在交付用户使用之后进行;而整个在系统可编程设计的最后一个步骤,也是最关键的步骤,也是最关键的步骤,就是器件的配置。配置过程加载设计规定的编程数据到器件中,以定义器件内部功能块及其互连,从而实现器件功能的重构升级。
当然ISP配置方式是多种多样的,其中计算机加下载线就是最常见的配置器件的方法;但是这个方法需要计算机配合,对嵌入式系统来说不太实用,因此需要一个更加方便灵活的配置方案。Lattice公司CPLD器件不仅具有ISP功能,同时融合引脚锁定功能和JTAG技术,使得抛弃计算机而使用微控制器在系统配置、修改、升级CPLD器件成为可能。特别是引脚锁定功能,实现了真正意义上的“动态”配置。采用引脚锁定技术,将配置前引脚状态锁定,配置完成以后各个引脚仍能保持配置前状态。本文介绍一个用微控制器在系统配置Lattice MACH4000系列CPLD器件的方案。
图1
1 原理
ISP器件要实现配置,除了ISP器件的硬件系统中要提供正确的ISP接口以外,还需要有配置文件和配置工具。
(1)配置接口
Lattice公司为器件提供了ISP接口和JTAG接口。
ISP接口是Lattice公司自行开发设计的,具有如下引脚定义:
SDI——数据输入和状态机控制;
MODE——和SDI一起控制状态机;
MODE——和SDI一起控制状态机;
SCLK——时钟输入;
SDO——数据输出,可选引脚;
IspEN——工作模式和配置模式选择,同时还有一个ISP状态机,包含3个状态,由MODE
和SDI控制状态机所处技术,在Shift状态通过SDI移入命令,在Execute状态执行命令。
联合测试行动小组JTAG(Joint Test Action Group)在20世纪80年代中期制定了边界扫描技术,在1990年被修改后成为IEEE的一个标准——IEEE1149.1-1990。这个标准即为JTAG。边界扫描技术最初发展盐业,是为了测试电路各个IC器件之间的互边是否正确。随着ISP
发展,许多生产厂商利用JTAG规定的四条引脚的测试存取口作为ISP的开发平台,使得ISP 也变得有标准可循,给用户带来了极大方便,于是JTAG在其权限内把ISP性能扩充到了IEEE1149.1中。发展到现在可以这样说,IEEE1149.1标准为我们提供了一条简单的串行接口,将那些具有JTAG接口的器件串接在一打扫描链中。通过这个接口既能实现ISP又能实现测试。
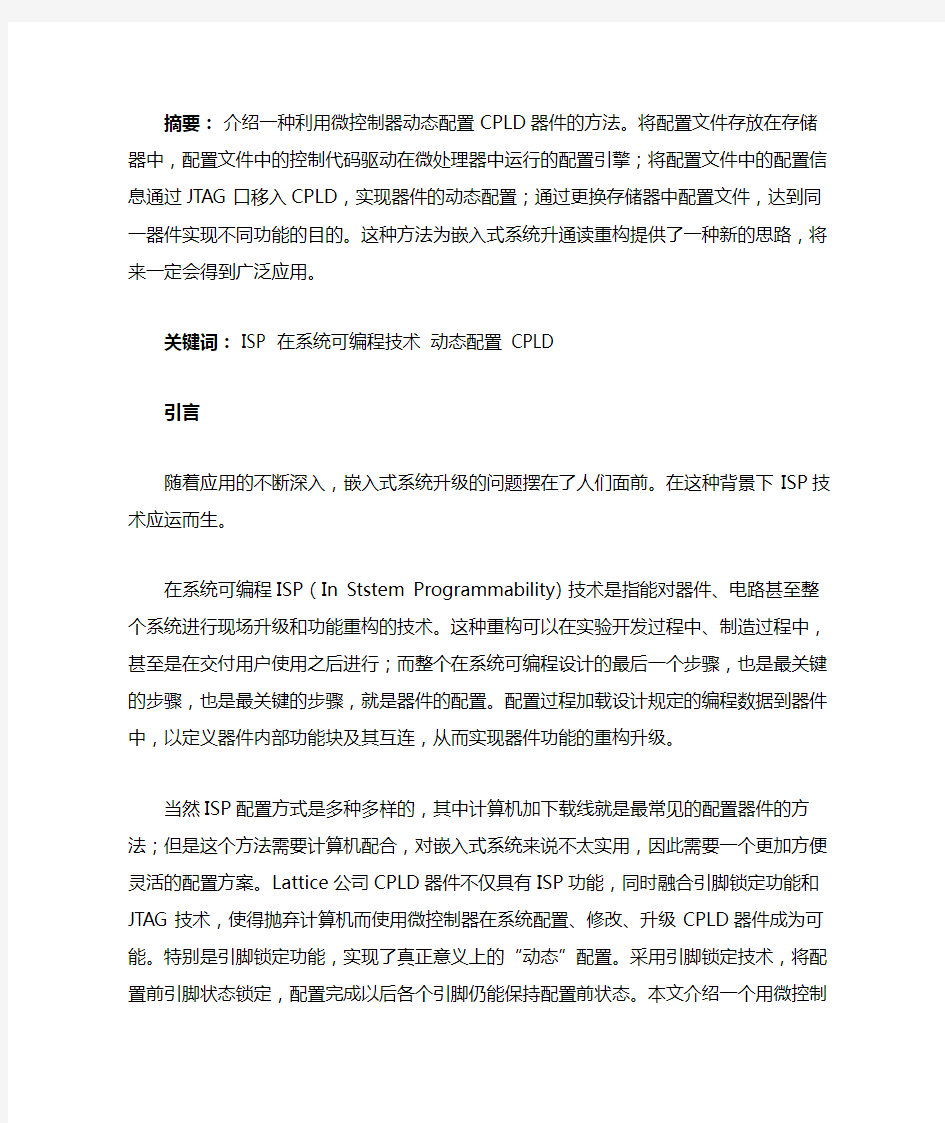
IEEE1149.1标准对边界扫描结构的定义包括4个基本单元:4个引脚的测试存取口TAP(Test Access Port)、数据寄存器、指令寄存器和TAP控制器。TAP引脚定义如下:TCK为测试时钟输入,TDI为测试数据输入,TDO为测试数据输出,TMS为测试模式选择。数据寄存器包
含两种BYPASS寄存器和BSR(Boundary Scan Register)寄存器,其中BSR由BSC(Boundary Scan Cell)串联而成,正是通过BSC才把来自于TAP的数据移入ISP芯片内部逻辑。另外TAP控制器作为一个有限状态机,共有16个状态。它控制着测试存取口、指令寄存器和数
据寄存器。TAP控制器如图1所示。
通过TCK、TMS控制TAP控制器的状态。当TAP控制器处于Shift-IR状态时,TDI口进入的指令被移进指令寄存器;当TAP控制器入于Update-IR状态时,指令寄存器的指令有效。根据这个原理,通过控制此状态机,将配置信息移入器件内。另外,TAP测试存取口4个引脚有严格的时序要求,如图2所示。
其中TMS、TDI在TCK上升沿有效,TDO在TCK下降沿有效。要想通过JTAG口实现ISP或者测试,都必须遵守这些时序要求。
通过对两种接口的研究发现,它们均能实现ISP,然而JTAG口的测试功能以及与其它具有JTAG口器件之间的灵活的连接性显得更有优势,这也使得Lattice公司认识到了ISP接口
的局限,因此在它后来开发生产的新器件中都采用了JTAG。在本方案中用到的
LatticeMACH4000系列CPLD器件,运行频率最高达400MHz,待机电流仅为20μA,宏单元数目最高达1024个,引脚到引脚延时2.5ns,在系统配置要用JTAG接口。
图2
(2)配置文件
在进行配置前需要得到一个JED文件,也就是我们所说的熔丝图文件。在这个文件里包含了相应器件的配置信息,即该器件内部互连逻辑。在开发环境ispLEVER3.0里按照自上而下的顺序进行逻辑设计,经过行为仿真和时序仿真后,开发环境将生成这个熔丝图文件。除了JED文件,另外还需要一个能说明菊花花链组成顺序的.xcf文件。特别是当系统中有多个ISP器件且组成菊花链进行配置时,通过这个文件将分散在各个器件内部的JTAG链按照先后顺序组成一条系统级的扫描链,下载工具通过这个文件里的信息决定当前TDI上的数据是哪个器件的数据。有了这2个文件以后就可以通过下载工具进行器件配置了。
(3)配置工具
Lattice公司在PC和Workstation平台提供的下载工具叫IspVM。通过这个下载软件加上下载线可以实现器件配置。另外,Lattice在业界首创的利用系统板上的微控制器或微处理器进行编程的嵌入式、多供应商、单链、在系统可编程工具IspVM EMBEDDED,作为一种软件实现,一旦在微控制器或处理器安装成功,系统将有能力直接通过电路板上的处理器对板上所有可编程逻辑器件进行编程或再编程,而无需使用下载电费或人工干预。当然,为了使用这种软件,必须将JED文件转化成该软件支持的文件格式VME。VME作为专门支持IspVM EMBEDDED的文件,里面除了包括来自于JED和XCF的配置信息以外,不觉包括了能驱动IspVM EMBEDDED配置引擎的控制信息。正是这些控制信息使TAP状态机进入相应状态,从而将配制信息移入器件内。需要注意的是,如果要将VME存储在存储器上,还需要将其转化成HEX 格式。本方案将在MSP430单片机上实现IspVM EMBEDDED,从而提供一种嵌入式系统升级方案。
2 方案设计
系统硬件电路如图3所示。
MSP430单片机P2口作为配置接口,接到Lattice MACH4128V的JTAG口上,外挂一个E2PROM,用来存储HEX格式的VME文件。整个过程是,通过串口接收来自计算机的配置文件,放到
E2PROM,接收完毕以后,单片机运行配置引擎,读取E2PROM,配置指令通过JTAG口对Lattice MACH 4128V进行配置。需要指出的是,Lattice MACH 4128V并没有用专门的引脚来控制进入配置模式或退出配置模式,而仅仅是通过TAP控制所处状态来决定的。IEEE1149.1标准
中规定:器件加电时或应用中不利用边界扫描逻辑,强迫TAP控制器处于Test-Logic-Reset 状态,因此在通过程序控制JTAG进行器件配置结束时,一定要通过软件方式强迫TAP控制器回到Test-Logic-Reset状态,下面提到的ispVMEnd()函数实现的就是这个功能。另外,当通过JTAG口完成器件配置或测试以后,TMS、TDI引脚器件内部上拉。虽然如此,为了防止TCK可能出现的信号使JTAG状态机离开Test-Logic-Reset状态,或者因为上电瞬间可能产生的TCK信号导致状态机进入未知状态,设计电路时必须在TMS引脚加4.7kΩ下拉电阻。另外,电路中Vcc=3.3V。
3 软件介绍
软件部分包括PC机程序和MSP430单片机程序。其中PC机程序将HEX格式的VME文件通过串口传送给单片机;MSP430单片机程序包括ispVM EMBEDDED,串口读写和E2PROM读写部分。
作为整个配置的核心,ispVM EMBEDDED主要由存储在E2PROM的VME文件驱动,从而将配置信息串行移入Lattice MACH 4128中。整个过程如下:首先,验证VME文件的版本,只有相应版本的ispVM EMBEDDED才能解释同样版本的VME文件,ispVMStart()函数强迫TAP状态机进入配置主引擎ispVMCode(),来自于VFME中的控制代码将驱动这个引擎执行相应操作,其中3个控制代码最为常见的STATE、SIR、SDR和STATE代码控制TAP状态机进入声明的状态,如Shift-DR、Shift-IR等。SIR代码表明将向器件中移入指令流,SDR代码表明将向器件中移入数据流。通过这种方式,配置主引擎ispVMCode()将VME中包含的配置信号器件从而完成配置,配置完成ispVMCode()返回一个配置成功与否的代码。最后ispVMEnd()强迫TAP状态机进入Test-Logic-Reset状态。
Void ispVMEnd(void){
IspVMStateMachine(RESET);/*TAP状态机进入Test-Logic-Reset状态*/
IspVMDelay(1);/*一段延时后,器件由配置模式切换到运行模式*/
}
事实上,作为专门针对嵌入式平台的配置工具ispVM EMBEDDED并不依赖于特定的硬件或系统平台,所以可以很容易地往用户自己的系统上移植。3个与硬件相关的函数需要用户自己改写,Readprot()从输入引脚读一个字节,Writeport()通过输出引脚向外发送一个字节,ispVMDelay()系统延时。在MSP430上的实现如下:
#define pinTDI 0x02 //定义P2.1为TDI
#define pinTDO 0x08 //定义P2.3为TDO
short int isp_pins用来存放当前JTAG口的引脚信号
unsigned char readPort(void){
unsigned char PortVal;
PortVal=P2IN; //读取P2口
return ((unsigned char)(PortVal &pinTDO)?0x01:0x00));//返回TDO引脚信号
}
void writePort(unsigned char pins,unsigned char value){
if(value)
isp_pins=pins|isp_pins;//把isp-pins引脚置高
else
isp_pins=~pins&isp_pins;//把isp-pins引脚置低
P2OUT=isp_pins;
}
void ispVMDeay(unsigned short int delay_time){//delay_time来自于配置文件,通过它告诉配置引擎具体需要延时多久
if(delay_time &0xA000){//ms级延时
delay_time &=~0xA000;
}
else if(delay_time>=1000)//如果是μs级,转换成ms级延时
delay_time=delay_time/1000;
else
delay_time=1;//延时小于1ms时,就延时1ms
PS1ms=delay_time;
CCTL0=CCIE; //开定时
while(PS1ms){};//在中断PS1ms
CCTL0&=~CCIE; //关定时
}
有一点需要指出,ispVM EMBEDDED要求将已转化成HEX格式的VME作为程序的一部分固化在单片机里。很显然,要想更换配置文件,就必须连同单片机程序一同换掉。这对实现动态配置是不利的,也是为什么在本方案中外加E2PROM的原因。这样无须更改程序,只换掉E2PRO 中的配置文件即可。因此还需要更改GetByte()函数。
对24C512的操作应该遵循I2C总线协议,而在MSP430中没有I2C总线硬件,所以本方案中用软件方法模拟。由于I2C串行总线数据交换速度较慢,因而当从E2PROM中读出数据再往CPLD中移入时,形成了配置过程的速度瓶颈。在解决这个问题时,我们充分利用了MSP430149单片机内部2KB RAM,采用E2PROM最快的读取方式——顺序读,将配置数据预先读入到RAM 中,GetByte()函数直接从RAM中读取数据。这种方法在一定程度上提高了配置速度。我们改写的GetByte()函数是这样的:
unsigned char GetByte()
{ unsigned char data;
static unsigned short int index=0;
……
if(index==0){ //有新的数据来自E2PROM
fp=wmeArray;//放在unsigned char vmeArray[1024]
}
data=*fp++;
if(index<1024)
index++;
else {
index=0;
if((num+1024)>totalnum是已经读取字节数)
ReadBlock(address,totalnum-num);//totalnum是整个配置文件字节数}
else{
ReadBlock(address,1024);//从I2PROM的
address=adress+1024;//adress地址开始读1024字节
}
}
return(data);
}
PC机上应用程序用Delphi7.0开发设计,利用专门的串口控件很容易开发出串口通信程序,从而将VME配置文件发送到MSP430。当配置完成以后由MSP430返回“配置成功”。
4 结论
我们设计的基于MSP430的CPLD动态配置方案,充分利用了CPLD可重复配置的特性,为嵌入式系统升级重构提供了一种新的思路,将来一定有很好的应用前景。当然在这个方案中,由于采用外加E2PROM的原因,在配置速度上较慢。虽然本方案针对的是Lattice MACH4000系列CPLD器件,但是稍加改动也可用于Lattice其它ispJTAG器件,如ispXPLD、
ispGDX2等。另外在实际应用中,如果能加上网络模块,还可以实现远程的动态配置。
电子设计大赛报告.doc
自动搬运机器人 王泽栋1 曹嘉隆1 高召晗1 杨超2 (1.电子信息工程系学生,2.电子信息工程系教师) 【摘要】 本设计与实作是利用反射式红外线传感器所检测到我们所要跑的路线,我们以前后车头共4颗红外感应传感器TCRT5000来检测黑色路线,并利用Atmel 公司生产的8位单片机AT89S52单片机做决策分析。,将控制结果输出至直流电机让车体自行按预先设计好的路线行走。以AT89S52晶片控制自动搬运机器人的行径,藉由自动搬运的制作过程学习如何透过程式化控制流程、方法与策略、利用汇编语言控制电机停止及正反转,使自动搬运机器人能够沿轨道自行前进、后退以及转弯。目的是在于让车子达到最佳效能之后,参加比赛为最终目的。自动搬运机器人运行过程中会遇到直线、弯道、停止。该设计集检测,微控等技术为一体,运用了数电、模电和小系统设计技术。该设计具有一定的可移植性,能应用于一些高难度作业环境中。 【关键词】自动搬运;黑线检测;时间显示。 1.系统方案选择和论证 1.1 系统基本方案 根据要求,此设计主要分为控制部分和检测部分,还添加了一些电路作为系统的扩展功能,有电动车每一次往返的时间(记录显示装置需安装在机器人上)和总的行驶时间的显示。系统中控制部分包括控制器模块、显示模块及电动机驱动模块。信号检测部分包括黑线检测模块。系统方框图如图1.1.1 图1.1 系统方框图 1.2各模块方案的比较与论证 (1)控制器模块 根据设计要求,控制器主要用于信号的接收和辨认控制电机的正反转、小车的到达直角转弯处的转向、时间显示。 方案一:采用MCS-51系列单片机价格低、体积小、控制能力强。 方案二:采用与51系列单片机兼容的Atmel公司的AT89S52作为控制器件
Lattice XO中文使用教程
Lattice MachXO TM 设计指南 v1.1
1.介绍 (4) 1.1特征 (4) 1.2产品系列和器件选择手册 (5) 1.3性能分析 (6) 2.体系结构 (7) 2.1M ACH XO结构概述 (7) 2.1.1PFU结构 (7) 2.1.2Slice结构 (8) 2.1.3布线资源 (9) 2.2结构特征 (9) 2.2.1时钟/控制信号网络 (9) 2.2.2锁相环PLL (10) 2.2.3片内时钟振荡器 (11) 2.2.4嵌入块RAM (EBR) (11) 2.2.5I/O特性 (11) 2.2.6休眠模式 (13) 2.2.7器件编程 (13) 3.设计综合&实现 (14) 3.1开发流程 (14) 3.2设置约束项 (16) 3.2.1设置I/O位置 &属性 (16) 3.2.2设置时钟频率|周期 (16) 3.2.3设置建立&保持时间 (17) 3.2.4设置Tco时间 (19) 3.2.5设置MutiCycles | MaxDelay | Tpd (20) 3.2.6时序约束例外(BLOCK) (20) 3.2.7信号分组 (20) 4.器件应用要点 (21) 4.1M ACH XO系列器件V CC,V CCAUX,V CCIO作用和连接 (21) 4.2M ACH XO系列器件各电源上电顺序及要求 (21) 4.3M ACH XO热插拔应用注意事项 (21) 4.4如何使用全局复位功能 (22) 4.5如何使用全局输出三态功能 (22) 4.6如何使用全局时钟 (23) 4.7如何使用TFR功能(透明现场升级) (23) 4.8如何使用M ACH XO的差分信号 (24) 4.9如何接口5V输入信号 (25) 4.10如何在同一B ANK使用不同I/O口电平标准 (25) 4.11如何减小T CO时间 (26) 4.12什么-M速度级别? (27) 4.13如何获得时序分析结果? (27) 4.14如何知道资源利用率 (28) 4.15如何使用M ACH XO的块RAM(EBR) (28) 4.16如何利用PFU生成移位寄存器和分布式RAM (29) 4.17如何使用锁相环(PLL) (30) 4.18下载接口(TAP)的连接建议 (30) 4.19如何设置加密位和用户代码 (30)
全国电子设计大赛资料报告材料一等奖
2013年全国大学生电子设计竞赛 简易旋转倒立摆及控制装置(C题) 【本科组】 摘要: 通过对该测控系统结构和特点的分析,结合现代控制技术设计理念实现了以微控制器MC9S12XS128系列单片机为核心的旋转倒立摆控制系统。通过采集的角度值与平衡位置进行比较,使用PD算法,从而达到控制电机的目的。其工作过程为:角位移传感器WDS35D通过对摆杆摆动过程中的信号采集然后经过A/D 采样后反馈给主控制器。控制器根据角度传感器反馈信号进行PID数据处理,从而对电机的转动做出调整,进行可靠的闭环控制,使用按键调节P、D的值,同时由显示模块显示当前的P、D值。 关键字: 倒立摆、直流电机、MC9S12XS128单片机、角位移传感器WDS35D、PD算法
目录 一、设计任务与要求 (3) 1 设计任务 (3) 2 设计要求 (3) 二系统方案 (4) 1 系统结构 (4) 2 方案比较与选择 (4) (1)角度传感器方案比较与选择 (4) (2)驱动器方案比较与选择 (5) 三理论分析与计算 (5) 1 电机的选型 (5) 2 摆杆状态检测 (5) 3 驱动与控制算法 (5) 四电路与程序设计 (6) 1 电路设计 (6) (1)最小系统模块电路 (6) (2)5110显示模块电路设计 (7) (3)电机驱动模块电路设计 (8) (4)角位移传感器模块电路设计 (8) (5)电源稳压模块设计 (8) 2 程序结构与设计 (9) 五系统测试与误差分析 (10) 5.1 测试方案 (10) 5.2 测试使用仪器 (10) 5.3 测试结果与误差分析 (10) 6 结论 (11) 参考文献 (11) 附录1 程序清单(部分) (12) 附录2 主板电路图 (15) 附录3 主要元器件清单 (16)
快速入门指南
快速入门指南 Sybase 软件资产管理 (SySAM) 2
文档 ID:DC01050-01-0200-01 最后修订日期:2009 年 3 月 版权所有 ? 2009 Sybase, Inc. 保留所有权利。 除非在新版本或技术声明中另有说明,本出版物适用于 Sybase 软件及任何后续版本。本文档中的信息如有更改,恕不另行通知。此处说明的软件按许可协议提供,其使用和复制必须符合该协议的条款。 要订购附加文档,美国和加拿大的客户请拨打客户服务部门电话 (800) 685-8225 或发传真至 (617) 229-9845。 持有美国许可协议的其它国家/地区的客户可通过上述传真号码与客户服务部门联系。所有其他国际客户请与 Sybase 子公司或当地分销商联系。升级内容只在软件的定期发布日期提供。未经 Sybase, Inc. 事先书面许可,不得以任何形式或任何手段(电子的、机械的、手工的、光学的或其它手段)复制、传播或翻译本手册的任何部分。 Sybase 商标可在位于 https://www.360docs.net/doc/8d9723172.html,/detail?id=1011207 上的“Sybase 商标页”进行查看。Sybase 和列出的标记均是 Sybase, Inc. 的商标。 ?表示已在美国注册。 Java 和基于 Java 的所有标记都是 Sun Microsystems, Inc. 在美国和其它国家/地区的商标或注册商标。 Unicode 和 Unicode 徽标是 Unicode, Inc. 的注册商标。 本书中提到的所有其它公司和产品名均可能是与之相关的相应公司的商标。 美国政府使用、复制或公开本软件受 DFARS 52.227-7013 中的附属条款 (c)(1)(ii)(针对美国国防部)和 FAR 52.227-19(a)-(d)(针对美国非军事机构)条款的限制。 Sybase, Inc., One Sybase Drive, Dublin, CA 94568.
lattice FPGA简介
为什么Lattice在进入FPGA市场的第一年就能取得这么好的成绩? 我想这里面可能有三个层次的深层原因:第一,针对Altera和Xilinx在高端有Stratix和Virtex、在低端有Cyclone和Spartan产品的情况下,我们选择了从中端切入的策略,从而在刚进入FPGA应用市场时能够有效地避免与已在高端和低端市场确立了自己领导地位的Altera和Xilinx发生正面冲撞,二年多来的实践证明这一策略是非常正确的;第二,我们在满足市场要求的严格质量前提下做出了自己的产品特色,例如,我们的低端LatticeECP2/M FPGA产品在保持对Cyclone和Spartan价格竞争力的前提下,再增加了一些切合用户实际应用需要而主要竞争对手还没有的功能,如更多的高速串行接口、更多的I/O口、128位AES加密和更大的内部存储空间等;第三,系统制造商心里也期望市场能涌现出较强的第3个FPGA供应商,因为这样才能形成稳定的三足鼎立之势,促进市场的有序竞争,并帮助它们稳定供应链和进一步降低运营成本。 目前FPGA和CPLD在哪些主要应用空间具有不可替代的关键地位? 目前FPGA和CPLD的目标应用主要可分为以下三大类:低成本应用、对价格敏感的高性能应用、以及需要极高性能的应用。第一类应用包括等离子或LCD TV、VoIP、机顶盒、图像渲染、音频处理和控制逻辑,第二类应用包括企业联网、GPON、企业存储、无线基站、协议转换、网络交换、图像滤波和存储器桥接,第三类应用包括光纤联网、SDH线路卡、下一代40G光通道卡、局域网交换机、DDR3存储器测试仪、高端服务器、背板高速接口、数据包成帧和分拆、高速存储器控制和高速信号处理。 Lattice目前主要有哪几条产品线?它们各针对什么目标应用? Lattice目前主要有4条产品线:针对低端市场的低成本FPGA LatticeECP2/M、针对高端市场的系统级高性能FPGA LatticeSC/M、带嵌入式闪存的非易失性FPGA LatticeXP和MachXO、以及混合信号PLD ispClock和Power Manager II,LatticeECP2和LatticeECP2M的主要区别是后者还带有SRAM存储器,LatticeSC和LatticeSCM的主要区别也一样。LatticeECP2的目标市场是第一类低成本应用,它主要与Cyclone和Spartan进行竞争。LatticeECP2M的目标市场是第二类应用,它主要与Stratix和Virtex进行竞争。LatticeSC/M的目标市场是第三类应用,它主要与Stratix-GX和Virtex-FXT进行竞争。LatticeXP带有闪存,因此它特别适用于对瞬时上电、安全性和现场逻辑升级能力有特殊要求的应用。MachXO系列产品将CPLD和FPGA的特性组合在一起,特别适用于诸如总线桥接、总线接口和控制等应用(传统上,这些应用大都采用CPLD或者低容量的FPGA来实现)。Lattice的可编程混合信号器件Power Manager II 和ispClock分别将电源管理和时钟管理器件与CPLD集成在一起,它们的设计应用目标是尽可能地消除PCB板上的分立器件和降低系统设计风险。 Lattice目前4条主要产品线的性能特点和应用特点分别是什么?
PS快速入门手册
一. 光和色的关系 1. PS是图像合成软件,是对已有的素材的再创造。画图和创作不是PS的本职工作。(阿随补充:当然了,PS也是可以从无到有的进行创作的,发展到现在来说,画图和创作两方面,PS也是可以完成很棒的作品了。) 2. 开PS软件之前,要准确理解颜色、分辨率、图层三个问题。 3. 红绿蓝是光的三原色;红黄蓝是颜色色料的三原色(印刷领域则细化成青品红(黑))。形式美感和易识别是设计第一位的,套意义、代表一个寓意的东西是其次的。 4. 色彩模式共有四种,每一种都对应一种媒介,分别为: ●lab模式(理论上推算出来的对应大自然的色彩模式) ●hsb模式(基于人眼识别的体系) ●RGB模式(对应的媒介是光色,发光物体的颜色识别系统。) ●CMYK模式(对应的是印刷工艺)。 5. 加色模式:色相的色值相加最后得到白色;减色模式:色相的最大值相加得到黑色。
6. lab色彩模式,一个亮度通道和两个颜色通道,是理论上推测出来的一个颜 色模式。理论上对应的媒介是大自然。 7. hsb色彩模式,颜色三属性: ●色相(色彩名称、色彩相貌,即赤橙黄绿青蓝紫等,英文缩写为h,它的单 位是度,色相环来表示) ●饱和度(色彩纯度,英文缩写s,按百分比计量,跟白有关) ●明度(英文缩写b,按百分比计量,明度跟黑有关)。 注意:黑色和白色是没有色相的,不具备颜色形象。 8. RGB色彩模式,每一个颜色有256个级别,共包含16 777 216种颜色。因 为本模式最大值rgb(255,255,255)得到的是白色,即rgb三个色值到了白色,所以称之为加色模式;当rgb(0,0,0)则为黑色。 三个rgb的色值相等的时候,是没有色相的,是个灰值,越靠近数量越低,是 深灰;越靠近数量越高,是浅灰。 9. CMYK色彩模式,色的三原色,也叫印刷的三原色(即油墨的三原色)青品(又称品红色、洋红色)黄。按油墨的浓淡成分来区分色的级别,0-100%,英文缩写CMY。白色值:cmy(0,0,0);黑色值(100,100,100),色相最大值 得到黑色,所以称之为减色模式。因为技术的原因,100值得三色配比得到的 黑色效果很不好,所以单独生产了一种黑色油墨,所以印刷的色彩模式是cmyk (k即是黑色)。 10. CMYK与RGB的关系:光的三原色RGB,两两运用加色模式(绿+蓝=青,
全国大学生电子设计大赛题一等奖数字频率计
2015 年全国大学生电子设计竞赛 全国一等奖作品 设计报告部分错误未修正,软 件部分未添加 竞赛选题:数字频率计(F 题)
摘要 本设计选用FPGA 作为数据处理与系统控制的核心,制作了一款超高精度的数字频率计,其优点在于采用了自动增益控制电路(AGC)和等精度测量法,全部电路使用PCB 制版,进一步减小误差。 AGC 电路可将不同频率、不同幅度的待测信号,放大至基本相同的幅度,且高于后级滞回比较器的窗口电压,有效解决了待测信号输入电压变化大、频率范围广的问题。频率等参数的测量采用闸门时间为1s 的等精度测量法。闸门时间与待测信号同步,避免了对被测信号计数所产生±1 个字的误差,有效提高了系统精度。 经过实测,本设计达到了赛题基本部分和发挥部分的全部指标,并在部分指标上远超赛题发挥部分要求。 关键词:FPGA 自动增益控制等精度测量法
目录
1. 系统方案 1.1. 方案比较与选择 宽带通道放大器 方案一:OPA690 固定增益直接放大。由于待测信号频率范围广,电压范围大,所以选用宽带运算放大器OPA690,5V 双电源供电,对所有待测信号进行较大倍数的固定增益。对于输入的正弦波信号,经过OPA690 的固定增益,小信号得到放大,大信号削顶失真,所以均可达到后级滞回比较器电路的窗口电压。 方案二:基于VCA810 的自动增益控制(AGC)。AGC 电路实时调整高带宽压控运算放大器VCA810 的增益控制电压,通过负反馈使得放大后的信号幅度基本保持恒定。 尽管方案一中的OPA690 是高速放大器,但是单级增益仅能满足本题基本部分的要求,而在放大高频段的小信号时,增益带宽积的限制使得该方案无法达到发挥部分在频率和幅度上的要求。 方案二中采用VCA810 与OPA690 级联放大,并通过外围负反馈电路实现自动增益控制。该方案不仅能够实现稳定可调的输出电压,而且可以解决高频小信号单级放大时的带宽问题。因此,采用基于VCA810 的自动增益控制方案。 正弦波整形电路 方案一:采用分立器件搭建整形电路。由于分立器件电路存在着结构复杂、设计难度大等诸多缺点,因此不采用该方案。 方案二:采用集成比较器运放。常用的电压比较器运放LM339 的响应时间为1300ns,远远无法达到发挥部分100MHz 的频率要求。因此,采用响应时间为4.5ns 的高速比较器运放TLV3501。 主控电路 方案一:采用诸如MSP430、STM32 等传统单片机作为主控芯片。单片机在现实中与FPGA 连接,建立并口通信,完成命令与数据的传输。 方案二:在FPGA 内部利用逻辑单元搭建片内单片机Avalon,在片内将单片机和测量参数的数字电路系统连接,不连接外部接线。 在硬件电路上,用FPGA 片内单片机,除了输入和输出显示等少数电路外,其它大部分电路都可以集成在一片FPGA 芯片中,大大降低了电路的复杂程度、减小了体积、电路工作也更加可靠和稳定,速度也大为提高。且在数据传输上方便、简单,因此主控电路的选择采用方案二。
OnXDC软件快速入门手册
OnXDC软件快速入门手册X0116011 版本:1.0 编制:________________ 校对:________________ 审核:________________ 批准:________________ 上海新华控制技术(集团)有限公司 2010年9月
OnXDC软件快速入门手册X0116011 版本:1.0 上海新华控制技术(集团)有限公司 2010年9月
目录 第一章、从新建工程开始 (3) 1.1新建工程 (3) 1.2激活工程 (3) 第二章、全局点目录组态 (4) 2.1运行系统配置 (4) 2.2点目录编辑 (4) 第三章、站点IP设置 (4) 第四章、运行XDCNET (5) 第五章、XCU组态 (6) 5.1用户登录 (6) 5.2进入XCU组态 (6) 5.3进行离线组态 (6) 5.4在线组态修改(通过虚拟XCU) (8) 第六章、图形组态 (11) 6.1进入图形组态界面 (11) 6.2手操器示例 (11) 6.3图形组态过程 (11) 6.4保存文件 (17) 6.5弹出手操器 (18) 6.6添加趋势图 (19) 6.7添加报警区 (20) 6.8保存总控图 (21) 第七章、图形显示 (21)
第一章、从新建工程开始 1.1新建工程 XDC800软件系统安装后会在操作系统的【开始】—>【程序】菜单中创建OnXDC 快捷方式,点击其中的【SysConfig】快捷方式运行系统配置软件,然后点击工具栏上的【工程管理器】按钮,打开工程管理器,点击工具栏上的【新建工程】按钮,弹出新建工程对话框,首先选择工程的存放路径,然后输入工程名称,如“XX电厂”,点击【确定】按钮,系统会在该工程路径下新建四个文件夹,分别是Gra、Res、Report、HisData,其中分别存放图形文件、图形资源文件、报表文件、历史数据文件。 1.2激活工程 在【工程管理器】的工程列表中找到刚刚创建的工程,选中后点击工具栏上的【激活工程】按钮,即可将该工程设为当前活动工程。
2015年电子设计大赛综合测评题课程设计解析汇报
郑州轻工业学院 电子技术课程设计 题目: 2015年电赛测评试题 姓名:王苗龙 专业班级:电信13-01 学号: 541301030134 院(系):电子信息工程学院 指导教师:曹卫锋谢泽会 完成时间: 2015年10月 29日
郑州轻工业学院 课程设计任务书 题目 2015年电子设计大赛综合测评试题 专业电信工程13-1 学号 541301030134 姓名王苗龙 主要内容、基本要求、主要参考资料等: 主要内容 1.阅读相关科技文献。 2.学习电子制图软件的使用。 3.学会整理和总结设计文档报告。 4.学习如何查找器件手册及相关参数。 技术要求 1、使用555时基电路产生频率20kHz-50kHz连续可调,输出电压幅度为1V的方波Ⅰ; 2、使用数字电路74LS74,产生频率5kHz-10kHz连续可调,输出电压幅度为1V的方波Ⅱ; 3、使用数字电路74LS74,产生频率5kHz-10kHz连续可调,输出电压幅度峰峰值为3V的三角波; 4、产生输出频率为20kHz-30kHz连续可调,输出电压幅度峰峰值为3V的正弦波Ⅰ; 5、产生输出频率为250kHz,输出电压幅度峰峰值为8V的正弦波Ⅱ;方波、三角波和正弦波的波形应无明显失真(使用示波器测量时)。频率误差不大于5%;通带内输出电压幅度峰峰值误差不大于5%。 主要参考资料 1.何小艇,电子系统设计,浙江大学出版社,2010年8月 2.姚福安,电子电路设计与实践,山东科学技术出版社,2001年10月 3.王澄非,电路与数字逻辑设计实践,东南大学出版社,1999年10月 4.李银华,电子线路设计指导,北京航空航天大学出版社,2005年6月 5.康华光,电子技术基础,高教出版社,2006年1月 完成期限: 2015年10月30日 指导教师签章: 专业负责人签章: 2015 年 10月26日
全国大学生电子设计大赛F题一等奖数字频率计
2015 年全国大学生电子设计竞赛 全国一等奖作品
设计报告 部分错误未修正,软 件部分未添加
竞赛选题:数字频率计(F 题)
1 / 10
摘要
本设计选用 FPGA 作为数据处理与系统控制的核心,制作了一款超高精度 的数字频率计,其优点在于采用了自动增益控制电路(AGC)和等精度测量法, 全部电路使用 PCB 制版,进一步减小误差。
AGC 电路可将不同频率、不同幅度的待测信号,放大至基本相同的幅度, 且高于后级滞回比较器的窗口电压,有效解决了待测信号输入电压变化大、频率 范围广的问题。频率等参数的测量采用闸门时间为 1s 的等精度测量法。闸门时 间与待测信号同步,避免了对被测信号计数所产生±1 个字的误差,有效提高了 系统精度。
经过实测,本设计达到了赛题基本部分和发挥部分的全部指标,并在部分指 标上远超赛题发挥部分要求。
关键词:FPGA 自动增益控制 等精度测量法
1 / 10
目录
摘 要....................................................................................................................1 目录........................................................................................................................ 2 1. 系统方案...................................................................................................3
1.1. 方案比较与选择................................................................................3 1.1.1. 宽带通道放大器.........................................................................3 1.1.2. 正弦波整形电路.........................................................................3 1.1.3. 主控电路.....................................................................................3 1.1.4. 参数测量方案.............................................................................4
1.2. 方案描述............................................................................................4 2. 电路设计...................................................................................................4
2.1. 宽带通道放大器分析........................................................................4 2.2. 正弦波整形电路................................................................................5 3. 软件设计...................................................................................................6 4. 测试方案与测试结果...............................................................................6 4.1. 测试仪器............................................................................................6 4.2. 测试方案及数据................................................................................7
4.2.1. 频率测试.....................................................................................7 4.2.2. 时间间隔测量.............................................................................7 4.2.3. 占空比测量.................................................................................8 4.3. 测试结论............................................................................................9 参考文献................................................................................................................ 9
2 / 10
Paramics快速入门手册
Paramics快速入门手册 本手册旨在提高广大用户的基础应用能力,为广大用户入门提供参考,手册涵盖了软件的安装与运行、仿真路网状态的查看、数据报告的查看和三维仿真方面的基础操作等内容。 用户可以以本手册作为学习Paramics软件的辅助手册,结合软件其他的技术操作手册(软件自带的manual)进行Paramics软件的基础学习。 用户在使用本手册的过程中如有疑问,请跟我们技术支持部门联系,发邮件至Paramics-China@https://www.360docs.net/doc/8d9723172.html,, 或登陆我们的网站https://www.360docs.net/doc/8d9723172.html,,九州联宇将给您提供完善的技术支持服务。
第一章 安装、运行软件 (3) 1.1安装软件 (3) 1.2运行软件 (3) 第二章 使用Paramics软件 (4) 2.1、二维模式下 (4) 2.2、三维模式下 (4) 2.3、观察点控制 (4) 2.4、地图窗口 (6) 2.5、仿真控制操作 (6) 第三章 仿真分析 (7) 3.1、OD显示 (7) 3.2、热点显示 (8) 3.3、车辆动态信息显示 (9) 3.4、车辆追踪 (11) 3.5、公共交通信息显示 (12) 第四章数据报告 (13) 第五章演示 (14) 5.1、设置图层 (14) 5.2、图层叠加 (14) 5.3、PMX模型 (15) 5.4、环境影响因素 (16) 5.5、飞越播放 (17) 第六章制作仿真视频 (18) 结语 (19)
第一章 安装、运行软件 1.1安装软件 用户在安装Paramics V6安装之前,必须确认安装了.NET Framework 3.0以上的版本。确认安装之后按照以下步骤操作: 1、插入安装光盘,以下两部分是必不可少的,点击Paramics V6 setup,运行软件 2、按照屏幕出现的安装指南进行操作 3、安装结束后要重启计算机 1.2运行软件 用户在启动Paramics之前,确保USB软件狗的红灯闪亮 用户可以通过一下操作打开Paramics路网 点击开始菜单,打开Paramics建模器(Modeller); 在软件中点击File ――Open,打开存放路网文件的文件夹; 选中Demo1,点击OK即可载入演示网络。
电子设计制作大赛报告
电子设计制作大赛报告设计课题:交通灯设计 专业班级:通信0913班 学生:文峰 巍巍 河昌 设计时间:2011.5.20~2011.6.5 电子设计制作竞赛报告
设计课题:交通灯设计 专业班级:通信0913班 学生:文峰巍巍河昌 设计时间:2011.5.20~2011.6.5 一、设计任务及实现要求: 1、使用LED灯模拟交通灯的工作过程,红、黄、绿三种颜色的LED灯分别模拟交 通灯的红灯、黄灯、绿灯。 2、实现如下要求的从状态一到状态四的循环,并通过数码管来显示倒计时的时间。 状态一:黄、绿灯熄灭,红灯亮5s,然后进入状态二; 状态二:红、绿灯熄灭,黄灯闪烁5s,然后进入状态三; 状态三:红、黄灯熄灭,绿灯亮5s,然后进入状态四; 状态四:红、绿灯熄灭,黄灯闪烁5s,然后回到状态一。 3、每个状态数码管都要显示倒计时的时间。 4、扩展:不同延时时间 二、设计原理(设计原理图,原理分析): 1、总原理图 2、PCB图:
3、原理分析: 采用74194的左移位功能,共输出4种状态,分别是0001;0010;0100; 1000;其中的0010与1000两状态实现黄灯亮,0001实现红灯亮,0100实现绿灯 亮;通过门电路反馈实现74194移位的功能。555芯片的作用是提供一个时钟给 74192,利用74192的功能实现减计数,与数码管相连,预置初始值为5,实现倒 计时5秒的功能。再利用借位端的跳变给74194一个时钟,即5秒实现一跳变, 以达到要求亮灯的时长。对于黄灯的闪烁,只要加门电路,实现每隔1s闪烁一次。 同时外加一个门电路和开关控制74192,实现拓展时间的要求。 三、各部分电路的功能: 1、555定时电路: 555电路工作原理:如图接线, R1用0.1k的电阻, R2用7.5k的电阻,C用100uf的电容,3脚为输出 端。产生的振荡周期T=0.7(R1+2R2)C。即T≈0.7* (0.1K+2*7.5K)*100u≈1.1s。将振荡周期从三端 输出,作为时钟。
lattice公司可编程逻辑器件开发软件ispDesignExpert
Lattice 公司的可编程逻辑器件开发软件ispDesignEXPERT Lattice公司网站的网址:https://www.360docs.net/doc/8d9723172.html,。 Lattice公司是在系统可编程技术(isp)的发明公司,该公司的可编程逻辑器件ispLSI器件具有使用简单,下载次数10000次和数据保存20年的特点,加之软件的开放程度高,所以该公司的产品在全国各个大学中使用很广泛。 (1)IspLSI CPLD产品介绍 Lattice公司的CPLD产品容量可以达到1000个宏单元,速度可以达到350MHz,输入输出引脚可达68个。这些产品满足各种电子装置的开发 (2)可编程逻辑器件的软件开发工具 (Programmable Logic Software Development Tools) Lattice 公司的逻辑软件开发工具是ispDesignEXPERT 系统,该系统包含设计输入、综合、仿真、适配设计和下载等功能,可以满足开发要求。 (3)下载ispDesignEXPERT软件 下载需到Lattice公司的网站,首先应该到下载网页,在下载网页选择要下载的软件。由于软件太大,需要分四个部分下载。 下载网页: Home / Products / Development Tools / Resources Development Tools Downloadable Software (可供下载的软件) You have retrieved 23 Development Tools Downloadable Software Software return to top ? Lattice Macros for Synario (Support for ISP (ver 3 0) and full Synario (2 3) versions) (April 11, 1997) 493 KB ? Lattice Macros for Synario (Support for ISP (ver 5 0) and full Synario (3 0) versions) (October 28, 1997) 467 KB ? Lattice Macros for Synario (Support for ISP (ver 5 1) and full Synario (3 1) versions) (June 8, 1998) 155 KB PALtoGAL v3 12 35 KB Reform 14 KB
A系统快速入门指导手册
九洲港协同办公自动化系统 用 户 使 用 手 册 集团电脑部 本公司办公自动化系统(以下简称OA系统)内容包括协同办公、文件传递、知识文档管理、
公共信息平台、个人日程计划等,主要实现本部网络办公,无纸化办公,加强信息共享和交流,规范管理流程,提高内部的办公效率。OA系统的目标就是要建立一套完整的工作监控管理机制,最终解决部门自身与部门之间协同工作的效率问题,从而系统地推进管理工作朝着制度化、准化和规范化的方向发展。 一、第一次登录到系统,我该做什么? 1、安装office控件 2、最重要的事就是“修改密码”!初始密码一般为“123456”(确切的请咨询系统管理员),修改后这个界面就属于您自己的私人办公桌面了! 点击辅助安 装程序 安装 office 控件
密码修改在这儿! 一定要记住你的 新密码! 3、设置A6单点登陆信息 点击配置系 统 点击设置参 数 勾选A6 办公系 统
输入A6用户和 密码后确定 二、如何开始协同工作? “协同工作”是系统中最核心的功能,这个功能会用了,日常办公80%的工作都可以用它来完成。那我们现在就开始“发个协同”吧! 1、发起协同 第一步新建事项 第五步发送 第二步定标题
第三步定流程 式 第四步写正文 方法:自定义流程图例:
第一步新建流程 式 第三步确认选中第二步选人员 在自定义流程时,人员下方我 们看到如下两个个词,是什么 意思呢? 第四步确认完成 、 提示(并发、串发的概念) 并发:采用并发发送的协同或文电,接收者可以同时收到 串发:采用串发发送的协同或文电,接收者将按照流程的顺序接收 下面我们以图表的方式来说明两者的概念: 并发的流程图为:
电子设计大赛实验报告
2014年江苏省大学生电子设计竞赛实验报告 无线电能传输装置(F题) 2014年8月15日 摘要:本设计基于磁耦合式谐振荡电路来进行无线电能传输,点亮LED灯。由于输入和输出都是直流电 的形式,因此本系统将分为以下四个部分:第一部分为驱动电路(DC-AC),为使直流分量转化成交流电并通过耦合线圈将电能传输给负载,采用LC谐振的方式让回路中电容和电感构成一个二阶LC谐振电路,驱动MOS管形成交流电。第二部分为发射电路(AC-AC),应用电磁感应原理,在二次线圈中产生感应电流并输给接受电路。第三部分为电能转换电路(AC-DC),输出的感应交流电经整流桥桥式整流后流入升压电路。第四部分为升压电路(DC-DC),对整流之后的直流进行升压,防止整流后的电压无法驱动LED。本设计分模块搭建并对各个部分电路进行原理分析。在调试时,采用分模块调试,根据调试结果修改参数,最终形成一个完整的稳定系统。 关键词: 磁耦合式谐振荡电路LC振荡电路桥式整流DC-DC升压 [Abstract] The design is based on magnetic resonance oscillation circuit coupled to the wireless power transmission, lit LED lights. Since the input and output are in the form of direct current, so the system will be divided into the following four parts: The first part of the drive circuit (DC-AC), is converted into alternating current so that the DC component and the power transmission through the coupling coil to the load, using LC resonant circuit in a manner so that the capacitance and inductance form a second order LC resonant circuit, the AC drive MOS tube formation. The second part is the transmitter circuit (AC-AC), application of the principle of electromagnetic induction,
全国电子设计大赛优秀报告
精心整理全国电子设计大赛训练项目 设计报告 题目数控通用直流电源 摘要 一、 1.1 1.2 1.3 1.4 二、 2.1系统总框图 (7) 2.2硬件设计 (7) 2.2.1开关稳压电源模块 (7) 2.2.2单片机控制模块 (8) 2.2.3正、负输出可调稳压电源模块 (9) 2.2.4按键模块 (10) 2.3软件设计 (10) 2.3.1主程序流程 (11) 2.3.2过流保护程序流程 (11) 三、测试、结果及分析 (12)
3.1基本功能 (12) 3.2发挥功能部分 (15) 四、总结 (15) 五、参考文献 (15) 附录一、完整的系统原理图 (16) 附录二、完整的系统PCB图 (17) 0.12V, 一、 设计并制作一个直流可调稳压电源。 二、设计要求 1.基本要求 ①用变压器输出的两组17.5V交流绕组,设计三组稳压电源,其中两组3V-15V可调,另一组固定输出+5V; ②各组输出电流最大:750mA; ③各组效率大于75%,在500mA输出条件下测量,应在DC/DC输入端预留电流测量端; ④为实现程序控制,预留MCU控制接口。 2.发挥部分 ①设置过流保护,保护定值为1.2A; ②用自动扫描代替人工按键,实现输出电压变化;
③扩展输出电压种类(比如三角波、梯形波等); ④可实现双电源同步调节或分别调节。 一、方案论证与比较 通过对题目的任务、要求进行分析,我们将整个设计划分成两个部分:稳压电源部分和数控部分。 1.1稳压电源部分方案比较 方案一:三端稳压电源 根据设计要求,可以采用三端稳压器来实现输出系统所需的三种直流电压:固定+5V和两组可调输出。其中,用7805实现固定5V的输出,LM317实现可调输出(控制输出电压为1.2~37V)。 电路原理图如下: 图1固定5V输出 7805是我们最常用到的稳压芯片了,它的使用方便,用很简单的电路即可以输入一个直流稳压电源,它的输出电压为5v。 图2LM317可调电源模块 在综合考虑LM317的输出电压范围1.25~37V和其最小稳定工作电流不大于5mA的条件下保证R1≤0.83KΩ,R2≤23.74KΩ,就能保证LM317稳压块在空载时能够稳定工作。输出电压:V O =1.25(1+R2/R1),在LM317输出范围为1.25~37V的条件下,R2/R1范围为:0~28.6。 优点:线性电源工作稳定,输出纹波小,且不需做过多调整,使用较为方便,工作安全可靠,适合制作通用型、标称输出的稳压电源。缺点:线性稳压电路的内部功耗大,效率低,散热问题较难解决。 方案二:晶体管串联式直流稳压电路 晶体管串联式直流稳压电路。电路框图如图3所示,该电路中,输出电压UO经取样电路取样后得到取样电压,取样电压与基准电压进行比较得到误差电压,该误差电压对调整管的工作状态进行调整,从而使输出电压发生变化,该变化与由于供电电压UI发生变化引起的输出电压的变化正好相反,从而保证输出电压UO为恒定值(稳压值)。 图3晶体管串联式直流稳压电路方框图 方案三:开关电源 根据设计要求,可选用开关电源来完成设计。LM2596为电路设计核心。 调整管 取样 误差放大 基准电压 辅助电源 UI UO
lattice烧录线线序1
下载线线序说明 对于目前的欧型板和主控,信号分配器使用的都是Lattice烧录线,其中欧型板和信号分配器的接口定义是相同的,主控使用的是是8口双排接口,建议制作转换接口即可通用同一根信号线。 主控使用Lattice的程序下载线(以公司目前使用的烧录线为列,如下图) Lattice下载器: VSD-F2L4主控编程口的线序定义: 引脚线序说明: 引脚序号丝印线色备注 1脚VCC红色 3.3V 2脚TDO棕色 3脚TDI橙色 4脚NC黄色空脚 5脚NC绿色空脚 6脚TMS紫色 7脚GND黑色 8脚TCK白色
或者是以下线序: 引脚序号丝印线色备注 1脚VCC红色 3.3V 2脚TDO黄色 3脚TDI紫色 4脚NC橙色空脚 5脚NC蓝色空脚 6脚TMS棕色 7脚GND灰色 8脚TCK白色 Programmer cable Color(Mode1): Leg NO.print Cable Color remarks Pin1VCC Red 3.3V Pin2TDO Brown Pin3TDI Orange Pin4NC yellow NG Pin5NC Green NG Pin6TMS purple Pin7GND black Pin8TCK white Programmer cable Color(Mode2): Leg NO.print Cable Color remarks Pin1VCC Red 3.3V Pin2TDO yellow Pin3TDI purple Pin4NC orange NG Pin5NC Blue NG Pin6TMS Brown Pin7GND gray Pin8TCK white