鱼眼镜头节点调节

无论在拍摄球体全景还是矩阵接片的时候,大家已经知道精确定位镜头的节点是非常重要的。
特别是对物距较小的场景来说节点越精确后期越轻松。
当然,如果物距比较大的时候节点的要求就不是那么高了,甚至你手持拍摄都可以顺利通过软件完成接片,关于物距大的情况我们接下来再讨论。
现在让我们来讨论如何在通过图说快速理解节点便宜在照片上造成的结果愿应,及如何用图说快速地找到镜头节点。
首先我们来看镜头节点有可能出现的几种便宜情况
红色标点表示镜头的准确节点位置,而黄色就是转轴的各种偏移情况。
下面分别对每一种便宜情况给予图说解释,
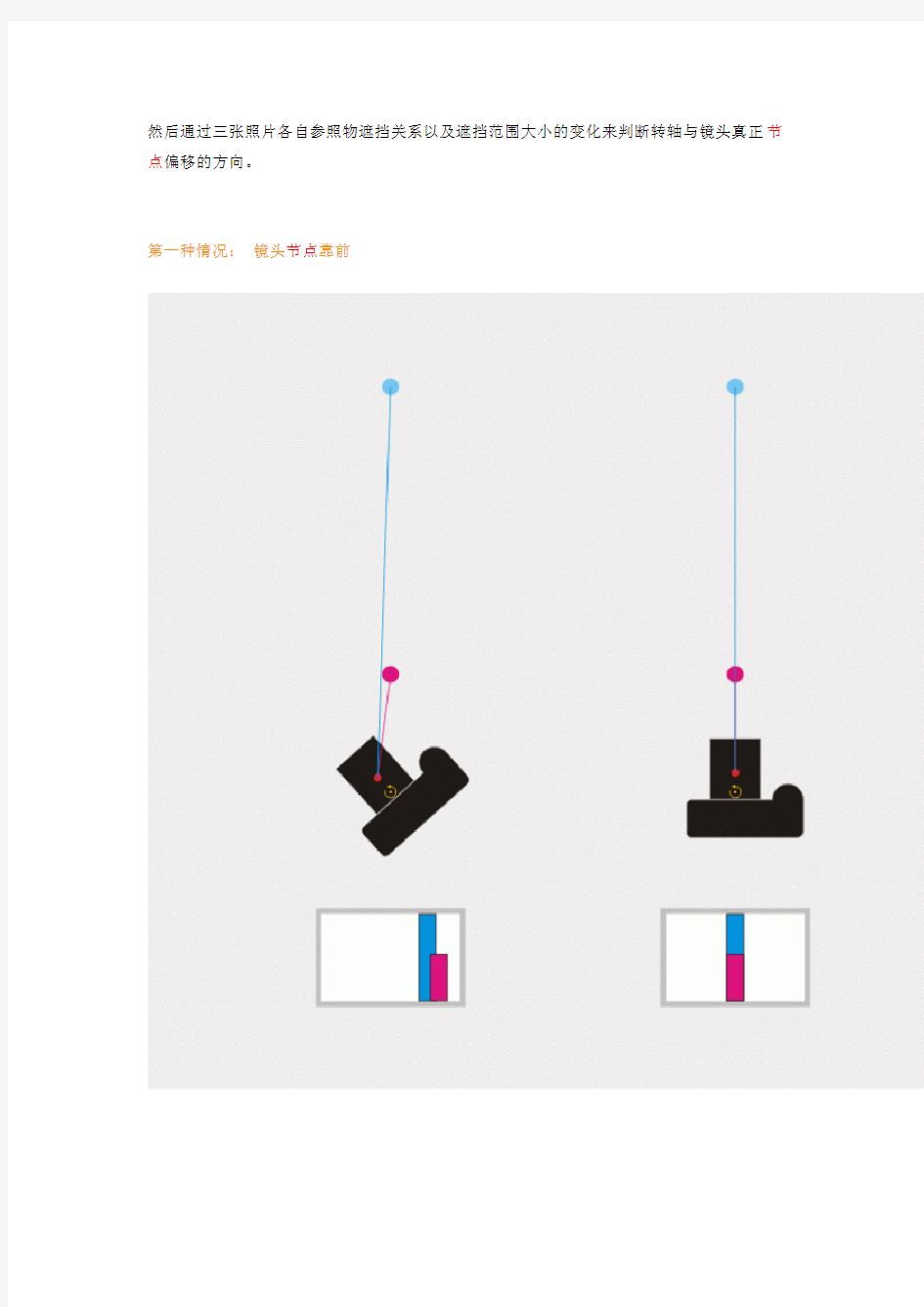
每次在调整节点的时候我们通常通过对准参照物旋转机身的方式分别拍摄3张照片,
然后通过三张照片各自参照物遮挡关系以及遮挡范围大小的变化来判断转轴与镜头真正节点偏移的方向。
第一种情况:镜头节点靠前
第二种情况:镜头节点靠后
第三种情况:镜头节点靠左
第四种情况:镜头节点靠右
以上4类情况可以清晰的通过所拍摄的图片中参照物体发生的变化来对应快速地调整节点云台,以获得精确的节点定位。
以下4中情况也是在调整过程中常常容易发生的,这时我们不是简单的分析图片中参照物的遮挡关系,而且要分析他们遮挡的程度大小关系。
第五种情况:镜头节点靠左前
第六种情况:镜头节点靠右前
第七种情况:镜头节点靠左后
第八种情况:镜头节点靠右后
这样8中节点便宜方式的图说都表现出来了,在实际调整过程中通过拍摄的图片对比上面的图说便能快速直观地知道下一步该如何调整节点。
方便大家快速地找到镜头精确的节点。
物距大小与节点精确与否的关系
在拍摄的球状全景的时候往往通常物距比较小,比如室内、近距离的景物等等,要求节点需要相对非常精确,后期合片的时候才轻松自如。
而在拍摄一些远景的矩阵接片时物距通常比较大,而且近距离内的物体不会出现在画面中时,拍摄时对镜头节点精度的要求就相对比较宽松。当物距足够大时你甚至转轴偏移节点很大的范围都不会造成后期接片的问题。
这其中的原理到底是为什么呢?
下面我们通过一个简单的几何作图示意来解释这个现象。
此图我们可以看到
相机在普通脚架上摇头的角度(蓝色区域)都是一样的只是相机离物体的距离不同
这样我们就发现一个问题当物距远时光线通过镜头节点的路径(红色)与正确节点光线的路径(黑色)的夹角越来越小。
如果物距足够远那么这个夹角就越倾向为0
夹角为0就意味着相机的摇头是以镜头节点为中心的。
这就是为什么物距越大对节点精确要求不高,而物距约小对节点精度要求越高的原因了。掌握了这个原理在实际运用中就可以灵活方便的处理问题了。
鱼眼图像畸变校正算法
鱼眼图像畸变校正算法 司 磊 朱学玲 (安徽新华学院 信息工程学院 安徽 合肥 230088) 摘 要: 根据鱼眼镜头成像的特点,选择合适的图像畸变校正算法,标定鱼眼图像的中心和半径,用标定得到的参数进行校正,推出校正模型,方法简单,易于实现,并对鱼眼图的畸变矫正问题提出意见与看法。 关键词: 鱼眼图像;畸变矫正;图像预处理;图像增强 中图分类号:TP391 文献标识码:A 文章编号:1671-7597(2012)1110166-02 鱼眼图像的畸变矫正是以某种独特的变换方式将一副鱼眼 2 有关鱼眼图片的粗略校正 图像转换为理想图像的操作,这种操作在全方位视觉导航中具1)求取鱼眼图像行和列的比值 有重要的作用,是系统自动识别、跟踪和定位目标所必须的基将投射生成标准圆变换为鱼眼图片并求取图片中心点的方础操作。 法与普通相机照相原理不同,对于提取出来的鱼眼图片的轮1 畸变图像的校正原理 廓,我们先假定一个阈值,比如设一个灰度值30,用软件勾勒描绘出校正鱼眼图片大概的轮廓,然后先求出该轮廓的中心点根据畸变图像特点标定坐标图,求取标定点像素的理想值坐标,根据轮廓的图形和鱼眼图像的中心点的坐标,可计算出和实际值,同时生成坐标映射表,再把坐标映射表用于畸变图畸变图像的圆半径,从而求取鱼眼图像的中心点坐标和鱼眼图像的校正程序后,即可得到无畸变图像,具体处理过程如下: 像的粗略轮廓的图像的半径相对比,以便于将鱼眼图像的大概1)标定坐标 轮廓重新调整处理,变的更为精确和直观。假定畸变校正的鱼镜头中心的畸变可以忽略为零,以镜头为中心,离镜头越眼图片的半径中的行坐标曲线和列坐标曲线不相等,则我们需远的地方畸变越大。以镜头为中心标定坐标图,对图像进行坐要将畸变校正的鱼眼图像中的园的半径的曲线与下面的公式相标的标定,按正方形均匀排列圆点,如图1所示。 乘,然后就可以变换为普通的标准圆的图像。下面公式中(u,v)是畸变校正的鱼眼图片的中心点,β为畸变校正的鱼眼图像行和列的比值。 图1 2)图像预处理 先通过图像的、突出边缘细节;然后再用二值化处理增强调节对比度的图像,但部分样板点和背景的对比的差值较大,所以是设定一个阈值对整幅图像进行二值化,最后再对二值化后的图像再次进行中值滤波的方法处理,再次使用中值滤波方法可以有效的去除畸变图像中的部分椒盐噪声的影响。二值化的主要作用是可以提高畸变校正图像的质量,预处理图像可以为点阵样板圆点中心的确定提供重要的作用。 3)圆点中心的确定 由于图像畸变的影响,经过图像预处理后的畸变校正图像仍然是不规则的实心圆,然而样板中的确定的圆点却是规则排列的,所以可以在畸变校正的样板图像上把各个圆点的重心近似的2)鱼眼图片的粗略扭曲校正 替换为圆点中心,找出一个圆点的重心作为理想畸变校正样板图在得到中心点的坐标和校正形状之后,把扭曲的鱼眼图像像上与之对应的点,并找出该点处于二维平面坐标之中与之距离通过投射降低图像的扭曲程度变为正常的四方形的图像。 之和最大的圆点,从各个圆点的坐标之中找出与之距离之和最大在图2中,假设在没有扭曲的背景图像中,存在两个具有的圆点坐标,该点坐标即为畸变图像中与之相对应的点的坐标。相同x坐标的点,即k点和h点,并且在背景图像中随着圆上曲线再找出理想的点阵样板图像和该畸变校正图像中各圆点中心的位的经纬度的变大,扭曲程度也就越大,但是三维球面的整体从置,计算出点与点之间的垂直距离,即可得到点阵样板图像中各左到右的各个面的角度的差值全部都是相等的,而且在x轴方向点之间的偏移量,从而可以描绘和构建畸变校正图像上的各个点上与二维畸变校正图像相对应的线段dx的均匀分割经度或是纬之间偏移量的曲面。最后经过图像预处理过程的样板圆点中心的度也是相等的。因此在二维图像的X轴方向上任意点坐标经度或 确定,可计算出其它圆点中心的坐标位置。 图2
鱼眼畸变矫正软件系统
fisheye畸变矫正软件系统 -西安冉科信息技术有限公司 技术目标: 鱼眼镜头的突出特点是一次性摄入 185°视角内所有的信息,无盲区,无须考虑图像拼合和嵌接等问题。但鱼眼图像具有非常严重的畸变,如果要利用这些具有严重变形图像的信息,就需将这些变形图像校正为人们所习惯的透视投影图像。本系统可以实现展开任意方向轴上的“展开窗口”,对图像中敏感信息的抓取具有积极效果。它的展开效果消除了其它恢复方法边缘“拉扯”的现象,在边缘也可以得到接近现实世界的效果。最终的实验结果表明,此算法具有流程简单、速度快、效果好、实用性强等特点,可以达到处理鱼眼镜头视频图像的实时校正要求。 技术内容: 1、确定鱼眼图像的圆心 2、建立鱼眼图像的符合等距投影原理的球面成像模型 3、建立透视投影平面坐标系与展开后的图像坐标系,并求出这两个坐标系之间的关系 4、建立恢复后图像坐标系与相机坐标系的关系 5、求出恢复后图像坐标系与鱼眼图像坐标系之间的关系
一、确定鱼眼图像圆心O与半径R 读取到视频帧,通过图像处理的方法,对图像进行分割,找到鱼眼图像区域的最小外接矩形,进一步对视频帧进行分割。根据分割出的鱼眼图像,确定鱼眼圆心。 二、建立鱼眼图像的符合等距投影原理的球面成像模型 1 以鱼眼图像的圆心O为原点建立鱼眼图像坐标系。 2 建立相机坐标系。 3 以O为中心,以鱼眼图像的半径R为半径做半球, 建立球面成像模型。 三、建立透视投影平面坐标系与展开后的图像坐标系,并求 出这两个坐标系之间的关系 1、确定展开的方位角、仰角、视角。
2、确定展开图像的大小。 3、根据展开图像大小和透视平面大小确定投影关系。 四、建立恢复后图像坐标系与相机坐标系的关系 1、建立透视投影平面坐标系与相机坐标系的关系 2、求出恢复后图像中点对应的在相机坐标系中的坐 标。 五、求出恢复后图像坐标系与鱼眼图像坐标系之间的关系 1、根据等距投影原理求出相机坐标系中的点在鱼眼图 像中的成像点的坐标。 2、根据所得到的映射关系即可得到恢复后图像任意一 点对应的鱼眼图像点的坐标。 技术方法和路线: UBANTU下结合opencv和ffmpeg对鱼眼视频进行解码和处理,视频帧的是通过ffmpeg解码获得,获得数据后,进行灰度处理,统计直方图,通过寻找最佳阈值,找到鱼眼区域。然后通过改变参数对任意区域进行校正,最后通过四分屏显示校正的结果。 开发语言:C 与 C++ 开发环境:UBANTU14.04 LTS(32bit),并配置opencv 与 ffmpeg 程序编程:使用gedit编辑、修改c/c++文件,用g++把编辑好的源文件编译成可执行程序,编译时需要链接opencv和线程库(因为使用了多线程),获得的可执行程序就可以对鱼眼畸变视频进行校正了。
鱼眼图像畸变校正算法
据《硅谷》杂志2012年第21期刊文称,根据鱼眼镜头成像的特点,选择合适的图像畸变校正算法,标定鱼眼图像的中心和半径,用标定得到的参数进行校正,推出校正模型,方法简单,易于实现,并对鱼眼图的畸变矫正问题提出意见与看法。 关键词:鱼眼图像;畸变矫正;图像预处理;图像增强 鱼眼图像的畸变矫正是以某种独特的变换方式将一副鱼眼图像转换为理想图像的操作,这种操作在全方位视觉导航中具有重要的作用,是系统自动识别、跟踪和定位目标所必须的基础操作。 1畸变图像的校正原理 根据畸变图像特点标定坐标图,求取标定点像素的理想值和实际值,同时生成坐标映射表,再把坐标映射表用于畸变图像的校正程序后,即可得到无畸变图像,具体处理过程如下:1)标定坐标 镜头中心的畸变可以忽略为零,以镜头为中心,离镜头越远的地方畸变越大。以镜头为中心标定坐标图,对图像进行坐标的标定,按正方形均匀排列圆点,如图1所示。 2)图像预处理 先通过图像的、突出边缘细节;然后再用二值化处理增强调节对比度的图像,但部分样板点和背景的对比的差值较大,所以是设定一个阈值对整幅图像进行二值化,最后再对二值化后的图像再次进行中值滤波的方法处理,再次使用中值滤波方法可以有效的去除畸变图像中的部分椒盐噪声的影响。二值化的主要作用是可以提高畸变校正图像的质量,预处理图像可以为点阵样板圆点中心的确定提供重要的作用。 3)圆点中心的确定 由于图像畸变的影响,经过图像预处理后的畸变校正图像仍然是不规则的实心圆,然而样板中的确定的圆点却是规则排列的,所以可以在畸变校正的样板图像上把各个圆点的重心近似的替换为圆点中心,找出一个圆点的重心作为理想畸变校正样板图像上与之对应的点,并找出该点处于二维平面坐标之中与之距离之和最大的圆点,从各个圆点的坐标之中找出与之距离之和最大的圆点坐标,该点坐标即为畸变图像中与之相对应的点的坐标。再找出理想的点阵样板图像和该畸变校正图像中各圆点中心的位置,计算出点与点之间的垂直距离,即可得到点阵样板图像中各点之间的偏移量,从而可以描绘和构建畸变校正图像上的各个点之间偏移量的曲面。最后经过图像预处理过程的样板圆点中心的确定,可计算出其它圆点中心的坐标位置。 2有关鱼眼图片的粗略校正 1)求取鱼眼图像行和列的比值 将投射生成标准圆变换为鱼眼图片并求取图片中心点的方法与普通相机照相原理不同,对于提取出来的鱼眼图片的轮廓,我们先假定一个阈值,比如设一个灰度值30,用软件勾勒描绘出校正鱼眼图片大概的轮廓,然后先求出该轮廓的中心点坐标,根据轮廓的图形和鱼眼图像的中心点的坐标,可计算出畸变图像的圆半径,从而求取鱼眼图像的中心点坐标和鱼眼图像的粗略轮廓的图像的半径相对比,以便于将鱼眼图像的大概轮廓重新调整处理,变的更为精确和直观。假定畸变校正的鱼眼图片的半径中的行坐标曲线和列坐标曲线不相等,则我们需要将畸变校正的鱼眼图像中的园的半径的曲线与下面的公式相乘,然后就可以变换为普通的标准圆的图像。下面公式中(u,v)是畸变校正的鱼眼图片的中心点,β为畸变校正的鱼眼图像行和列的比值。 2)鱼眼图片的粗略扭曲校正 在得到中心点的坐标和校正形状之后,把扭曲的鱼眼图像通过投射降低图像的扭曲程度变为正常的四方形的图像。