机械优化设计试题及答案

计算题
1.试用牛顿法求()221285f X x x =+的最优解,设()[]01010T
X =。
初始点为()[]01010T
X =,则初始点处的函数值和梯度分别为
()()0120
121700164200410140f X x x f X x x =+?????==????+????
,沿梯度方向进行一维搜索,有
()010000010200102001014010140X X f X αααα-??????=-?=-=??????
-??????
0α为一维搜索最佳步长,应满足极值必要条件
()
()[]
()()()(){
}
()
α?αααααα
αα
min 14010514010200104200108min min 2
0002
00
01=-?+-?-?+-?=?-=X f X f X f
()001060000596000?αα'=-=, 从而算出一维搜索最佳步长 059600
0.05622641060000
α=
=
则第一次迭代设计点位置和函数值01010200 1.245283010140 2.1283019X αα--????
==????-???
? ()124.4528302f X =,从而完成第一次迭代。按上面的过程依次进行下去,便可
求得最优解。
2、试用黄金分割法求函数()20
f ααα
=+
的极小点和极小值,设搜索区间
[][],0.2,1a b =(迭代一次即可)
解:显然此时,搜索区间[][],0.2,1a b =,首先插入两点12αα和,由式 ()1()10.61810.20.5056b b a αλ=--=--= ()2()0.20.61810.20.6944a b a αλ=+-=+?-=
计算相应插入点的函数值()()4962.29,0626.4021==ααf f 。
因为()()12f f αα>。所以消去区间[]1,a α,得到新的搜索区间[]1,b α, 即[][][]1,,0.5056,1b a b α==。 第一次迭代:
插入点10.6944α=, 20.50560.618(10.5056)0.8111α=+-=
相应插入点的函数值()()1229.4962,25.4690f f αα==,
由于()()12f f αα>,故消去所以消去区间[]1,a α,得到新的搜索区间[]1,b α,
则形成新的搜索区间[][][]1,6944.0,,1==b a b α。至此完成第一次迭代,继续重复迭代过程,最终可得到极小点。
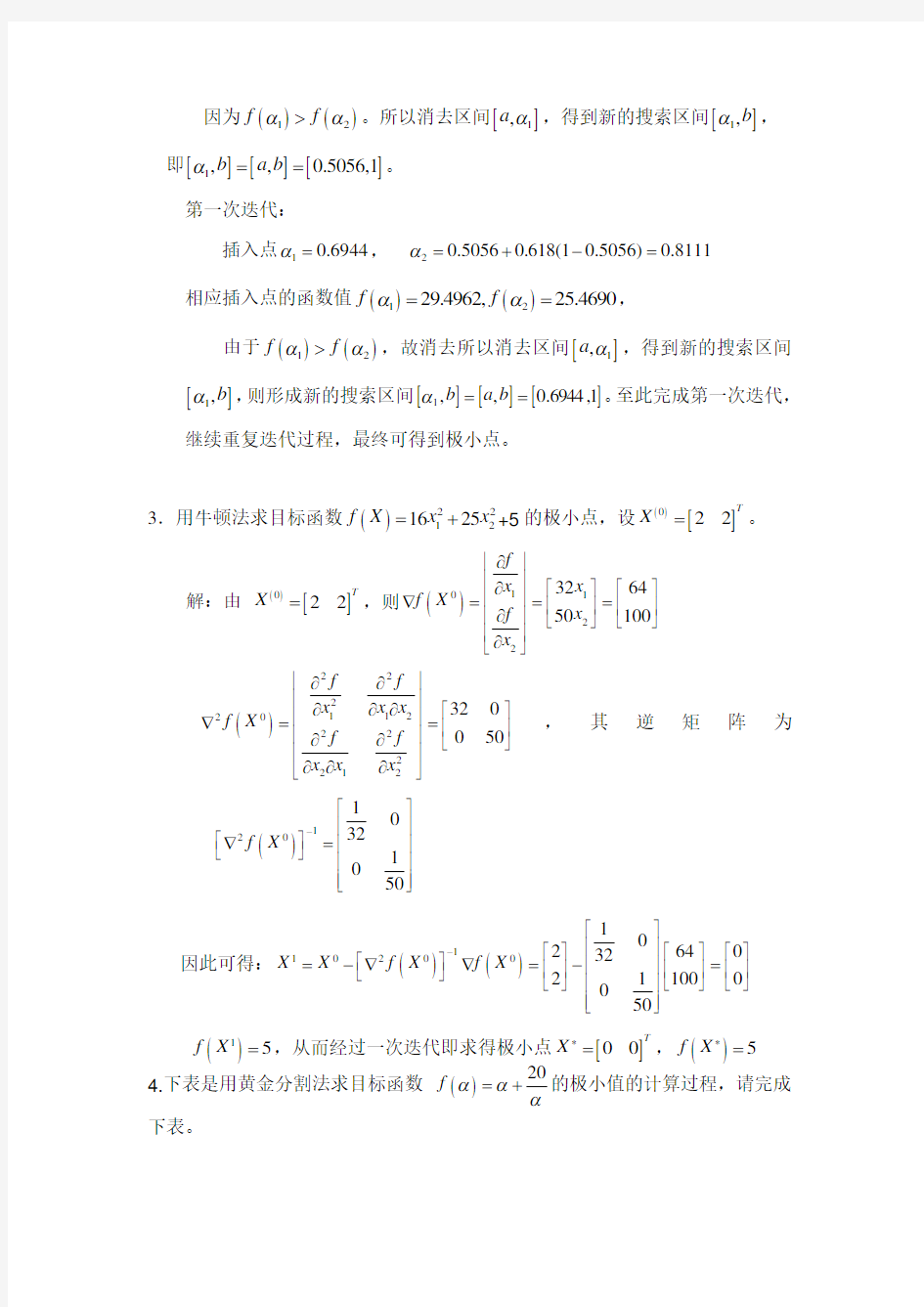
3.用牛顿法求目标函数()22
121625f X x x =++5的极小点,设()[]022T
X =。
解:由 ()
[]022T X =,则()11022326450100f x x f X x f x ???
???????
???===?????????
???????
()222
1
122022221
2320050f f x x x f X f f x x x ??
?????????
???==??
???????
??????
,其逆矩阵为
()1
2010321050f X -???????=????
?????
?
因此可得:()()1102001
02640322110000
50X X f X f X -??
??
????????=-??=-=?
?????????????????????
()15f X =,从而经过一次迭代即求得极小点[]00T
X *=,()5f X *=
4.下表是用黄金分割法求目标函数 ()20
f ααα=+的极小值的计算过程,请完成
下表。
5、 求二元函数f(x 1,x 2)=x 12+x 22-4x 1-2x 2+5在x 0=[0 0]T 处函数变化率最大的方向和数值? 解:由于函数变化率最大的方向是梯度方向,这里用单位向量P 表示函数变化率最大和数值是梯度的模II )(0x f ?II 。求f(x 1,x 2)在0x 点处的梯度方向和数值,计算如下:
)(0x f ?=0
21x x f x f ??????
??????????=0224221
x x x ????
??--=??
?
???--24 II )(0x f ?II =22
21)()(
x f
x f ??+??=52)2()4(22=-+- P=?????
?
?????
?-
-=?
?????--=??51525224)()(00x f x f 在21x x -平面上画出函数等值线和0x (0,0)点处的梯度方向P ,如图2-1所示。从图中可以看出,在0x 点函数变化率最大的方向P 即为等值线的法线方向,也就是同心圆的半径方向。
6、 用共轭梯度法求二次函数f(x 1,x 2)=x 12+2x 22-4x 1-2 x 1x 2 的极小点及极小值? 解: 取初始点 x 0 []T
11=
则 g 0=???
???-=?????
?---=?2424422)(012210
x x x x x x f
取 d 0=-g 0=??
?
???-24 沿d 0方向进行一维搜索,得
x 1=x 0+
αd 0=
??
????-+=??????-+??????00021412411ααα 其中的0α为最佳步长,可通过f (x 1)=0)(),(min 01
1='α?α?α
求得 0α=4
1
则
x 1 =
??????-+=??????-+??????00021412411ααα=???
?????212 为建立第二个共轭方向d 1,需计算 x 1 点处的梯度及系数0β值,得
g 1=?f (x 1)=???
???--=????
?
?---212442211221x x x x x
4
1
2052
210==
=
g g β 从而求得第二个共轭方向
d 1=-g 1+0βd 0=???
?????=??????-+??????2322441
21
再沿d 1进行一维搜索,得
x 2=x 1+1αd 1=???
?
????++=????????+????????111232122232212ααα
其中的1α为最佳步长,通过f (x 2)=0)(),(min 12
2='α?α?α
求得
1α=1
则 x 2
= ????????++=????????+????????111232122232212ααα=??
?
???24
计算 x 2点处的梯度
g 2=?f (x 2)=0002442221221=?
??
???=????
??---x x x x x 说明x 2点满足极值必要条件,再根据x 2点的海赛矩阵
G (x 2)=?
?
?
?
??--4222 是正定的,可知x 2满足极值充分必要条件。故x 2为极小点,即
??
?
???==242*x x
而函数极小值为8)(*
-=x f 。 7、求约束优化问题
Minf(x)=(x 1-2)2+(x 2-1)2 s.t. h(x)=x 1+2x 2-2=0 的最优解?
解: 该问题的约束最优解为[]8.0)(,2.06
.1**
==x f x T
。
由图4-1a 可知,约束最优点*x 为目标函数等值线与等式约束函数(直线)的切点。 用间接解法求解时,可取2μ=0.8,转换后的新目标函数为
)22(8.0)1()2(),(2122212-++-+-=x x x x x μφ
可以用解析法求min ),(2μφx ,即令0=?φ,得到方程组
08.0)2(211
=+-=??x x φ
06.1)1(222
=+-=??x x φ
解此方程组,求得的无约束最优解为:[]8.0),(,2.06
.12**
==μφx x T
其结果和原约束最
优解相同。图4-1b表示出最优点*x为新目标函数等值线族的中心。
图4-1
a)目标函数等值线和约束函数关系b)新目标函数等值线
机械优化设计实例(人字架优化)讲课教案
人字架的优化设计 一、问题描述 如图1所示的人字架由两个钢管组成,其顶点受外力2F=3×105N 。已知人字架跨度2B=152 cm,钢管壁厚T=0.25cm,钢管材料的弹性模量E=2.15 10? MPa ,材料密度p=7.8×103 kg /m ,许用压应力δy =420 MPa 。求钢管压应力δ不超过许用压应力 δy 和失稳临界应力 δc 的条件下,人字架的高h 和钢管平均直径D 使钢管总质量m 为最小。 二、分析 设计变量:平均直径D 、高度h 三、数学建模 所设计的空心传动轴应满足以下条件: (1) 强度约束条件 即 δ≤?? ????y δ 经整理得 ( ) []y hTD h B F δπ≤+2 122 (2) 稳定性约束条件: []c δδ≤ ( ) ( ) ( ) 2 22 222 122 8h B D T E hTD h B F ++≤+ππ (3)取值范围:
12010≤≤D 1000200≤≤h 则目标函数为:()22 13 57760010 5224.122min x x x f +?=- 约束条件为:0420577600106)(2 12 2 41≤-+?=x Tx x X g π () 057760025.63272.259078577600106)(2 2 212 12 2 42≤++-+?= X x x x Tx x g π010)(13≤-=x X g 0120)(14≤-=x X g 0200)(25≤-=x X g 01000)(26≤-=x X g 四、优化方法、编程及结果分析 1优化方法 综合上述分析可得优化数学模型为:()T x x X 21,=;)(min x f ;()0..≤x g t s i 。 考察该模型,它是一个具有2个设计变量,6个约束条件的有约束非线性的单目标最优化问题,属于小型优化设计,故采用SUMT 惩罚函数内点法求解。 2方法原理 内点惩罚函数法简称内点法,这种方法将新目标函数定义于可行域内,序列迭代点在可行域内逐步逼近约束边界上的最优点。内点法只能用来求解具有不等式约束的优化问题。 对于只具有不等式约束的优化问题
实验优化设计考试答案
第一题 考察温度对烧碱产品得率的影响,选了四种不同温度进行试验,在同一温度下进行了5次试验(三数据见下表)。希望在显着性水平为。 1.SSE的公式 2.SSA的公式 3.将表格粘贴进Excel,然后进行数据分析,勾选标于第一行,显示在下面 P=,远小于,所以是显着的 “方差分析” “响应C1C2C3C4” “选单因素未重叠” 4.打开Minitab,复制表格, “统计” 点击“比较”勾选第一个,确定 结果:工作表3 单因子方差分析:60度,65度,70度,75度 来源自由度SSMSFP 因子误差合计 S==%R-Sq(调整)=% 平均值(基于合并标准差)的单组95%置信区间 水平N平均值标准差------+---------+---------+---------+--- 60度度度度合并标准差= Tukey95%同时置信区间 所有配对比较 单组置信水平=% 60度减自: 下限中心上限------+---------+---------+---------+--- 65度度度度减自: 下限中心上限------+---------+---------+---------+--- 70度度度减自: 下限中心上限------+---------+---------+---------+--- 75度获得结果,区间相交包含的不明显,反之明显 第二题 为研究线路板焊点拉拔力与烘烤温度、烘烤时间和焊剂量之间关系。从生产过程中收集20批数据,见下表: 1.将表格粘贴进Minitab,然后“统计”“回归”“回归”“响应,变量”“图形,四 合一” 2.P小于,显着 4.残差分析 第三题 钢片在镀锌前需要用酸洗方法除锈, 为提高除锈效率,缩短酸洗时间,需 要寻找好的工艺参数。现在试验中考 察如下因子与水平:
机械优化设计——复合形方法及源程序
机械优化设计——复合形方法及源程序 (一) 题目:用复合形法求约束优化问题 ()()()2221645min -+-=x x x f ;0642 2211≤--=x x g ;01013≤-=x g 的最优解。 基本思路:在可行域中构造一个具有K 个顶点的初始复合形。对该复合形各顶点的目标函数值进行比较,找到目标函数值最大的顶点(即最坏点),然后按一定的法则求出目标函数值有所下降的可行的新点,并用此点代替最坏点,构成新的复合形,复合形的形状每改变一次,就向最优点移动一步,直至逼近最优点。 (二) 复合形法的计算步骤 1)选择复合形的顶点数k ,一般取n k n 21≤≤+,在可行域内构成具有k 个顶点的初始复合形。 2)计算复合形个顶点的目标函数值,比较其大小,找出最好点x L 、最坏点x H 、及此坏点x G .. 3)计算除去最坏点x H 以外的(k-1)个顶点的中心x C 。判别x C 是否可行,若x C 为可行点,则转步骤4);若x C 为非可行点,则重新确定设计变量的下限和上限值,即令C L x b x a ==,,然后转步骤1),重新构造初始复合形。 4)按式()H C C R x x x x -+=α计算反射点x R,必要时改变反射系数α的值,直至反射成功,即满足式()()()()H R R j x f x f m j x g
机械优化设计案例分析
优化设计案例分析 优化设计是在给定的设计指标和限制条件下,运用最优化原理和方法,在电子计算机上进行自动调优计算,从而选定出最优设计参数,使设计指标达到最优值。该最优设计参数就是一个最优设计方案。所谓设计指标,就机械设计而言,一般是指重量轻、能耗小、刚性大、成本低等;所谓限制条件,是指强度要求、刚度要求、尺寸范围要求等。 设计变量选择 一个设计方案可以用一组基本参数的数值来表示,这些基本参数可以是构件尺寸等几何量,也可以是质量等物理量,还可以是应力、变形等表示工作性能的导出量。在设计过程中进行选择并最终必须确定的各项独立的基本参数,称作设计变量,又叫做优化参数。在充分了解设计要求的基础上,根据各设计参数对目标函数的影响程度分析其主次,尽量减少设计变量的数目,以简化优化设计问题。注意各设计变量应相互独立,避免耦合情况的发生,否则会使目标函数出现“山脊”或“沟谷”,给优化带来困难。 目标函数与约束的确定 对于一般机械,可按重量最轻或体积最小建立目标函数;对应力集中现象突出的构件,以应力集中系数最小为目标;对精密仪器,应按其精度最高或误差最小的要求建立目标函数。约束条件是就工程设计本身而提出的对设计变量取值范围的限制条件,目前尚无一套完整的评价方法来检验哪些约束是必须,哪些约束是可忽略的,通常是凭经验取舍,不可避免会带来模型和现实系统的不相吻合。在最优化设计问题中,可以只有一个目标函数,称为单目标函数。当在同一设计中要提出多个目标函数时,这种问题称为多目标函数的最优化问题。在一般的机械最优化设计中,多目标函数的情况较多。目标函数愈多,设计的综合效果愈好,但问题的求解亦愈复杂。对于复杂的问题,要建立能反映客观工程实际的、完善的数学模型往往会遇到很多困难,有时甚至比求解更为复杂。这时要抓住关键因素,适当忽略不重要的成分,使问题合理简化,以易于列出数学模型,这样不仅可节省时间,有时也会改善优化结果。 数学模型确立 数学模型越精确,设计变量越多,维数越大,建模越复杂,优化进程越慢;但数学模型忽略过多元素,则难以确切凸现结构的特殊之处。故要结合工程实际和优化设计经验,把握与研究目标相关程度大的因素,尽可能的建立确切、简洁的数学模型。然后通过基于统计理论的检验方法———t 检验/F 检验/ X2检验/ 拟合优度检验等,分析模型的置信区间,对模型有效性进行评价,提高模型的准确度。 下面以机票销售策略案例进行说明 某航空公司每天有三个航班服务于A, B, C, H四个城市,其中城市H是可供转机使用的, 三个航班的出发地-目的地分别为AH, HB, HC,可搭乘旅客的最大数量分别为120人, 100人, 110人, 机票的价格分头等舱和经济舱两类. 经过市场调查,公司销售部得到了每天旅客的相关信息, 见表1. 该公司应该在每条航线上分别分配多少头等舱和经济舱的机票?
机械优化设计试卷期末考试及答案(补充版)
.. 第一、填空题 1.组成优化设计数学模型的三要素是 设计变量 、 目标函数 、 约束条件 。 2.函数()22121212,45f x x x x x x =+-+在024X ??=????点处的梯度为120-?? ? ??? ,海赛矩阵 为2442-?? ? ?-?? 3.目标函数是一项设计所追求的指标的数学反映,因此对它最基本的要能用 来评价设计的优劣,,同时必须是设计变量的可计算函数 。 4.建立优化设计数学模型的基本原则是确切反映 工程实际问题,的基础上力求简洁 。 5.约束条件的尺度变换常称 规格化,这是为改善数学模型性态常用的一种方法。 6.随机方向法所用的步长一般按 加速步长 法来确定,此法是指依次迭代的步 长按一定的比例 递增的方法。 7.最速下降法以 负梯度 方向作为搜索方向,因此最速下降法又称为 梯度法,其收 敛速度较 慢 。 8.二元函数在某点处取得极值的充分条件是()00f X ?=必要条件是该点处的海赛矩阵正定 9.拉格朗日乘子法的基本思想是通过增加变量将等式约束 优化问题变成 无 约束优化问题,这种方法又被称为 升维 法。 10改变复合形形状的搜索方法主要有反射,扩,收缩,压缩 11坐标轮换法的基本思想是把多变量 的优化问题转化为 单变量 的优化问题 12.在选择约束条件时应特别注意避免出现 相互矛盾的约束, ,另外应当尽量减少不必要的约束 。 13.目标函数是n 维变量的函数,它的函数图像只能在n+1, 空间中描述出来,为了在n 维空间中反映目标函数的变化情况,常采用 目标函数等值面 的方法。 14.数学规划法的迭代公式是 1 k k k k X X d α+=+ ,其核心是 建立搜索方向, 和 计算最佳步长 15协调曲线法是用来解决 设计目标互相矛盾 的多目标优化设计问题的。 16.机械优化设计的一般过程中, 建立优化设计数学模型 是首要和关键的一步,它是取得正确结果的前提。