视觉检测原理介绍

技术细节
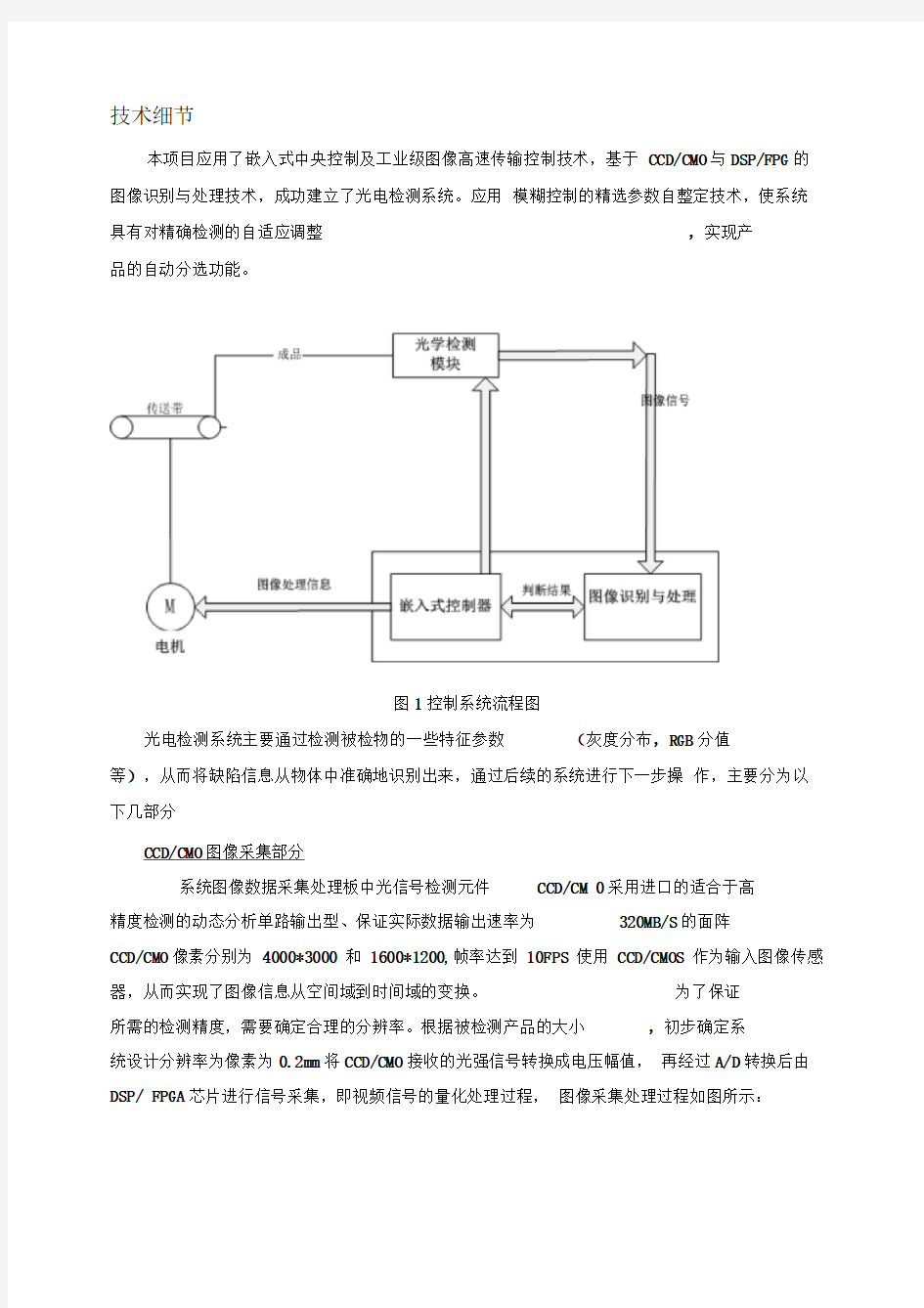
本项目应用了嵌入式中央控制及工业级图像高速传输控制技术,基于CCD/CMO与DSP/FPG的图像识别与处理技术,成功建立了光电检测系统。应用模糊控制的精选参数自整定技术,使系统具有对精确检测的自适应调整,实现产
品的自动分选功能。
图1控制系统流程图
光电检测系统主要通过检测被检物的一些特征参数(灰度分布,RGB分值
等),从而将缺陷信息从物体中准确地识别出来,通过后续的系统进行下一步操作,主要分为以下几部分
CCD/CMO图像采集部分
系统图像数据采集处理板中光信号检测元件CCD/CM 0采用进口的适合于高
精度检测的动态分析单路输出型、保证实际数据输出速率为320MB/S的面阵
CCD/CMO像素分别为4000*3000 和1600*1200,帧率达到10FPS 使用CCD/CMOS 作为输入图像传感器,从而实现了图像信息从空间域到时间域的变换。为了保证
所需的检测精度,需要确定合理的分辨率。根据被检测产品的大小,初步确定系
统设计分辨率为像素为0.2mm将CCD/CMO接收的光强信号转换成电压幅值,再经过A/D转换后由DSP/ FPGA芯片进行信号采集,即视频信号的量化处理过程,图像采集处理过程如图所示:
图2图像采集处理过程
数据处理部分
在自动检测中,是利用基于分割的图像匹配算法来进行图像的配对为基础的。图像分割的任务是将图像分解成互不相交的一些区域,每一个区域都满足特定区域的一致性,且是连通的,不同的区域有某种显著的差异性。分割后根据每个区域的特征来进行图像匹配,基于特征的匹配方法一般分为四个步骤:特征检测、建立特征描述、特征匹配、利用匹配的“特征对”求取图像配准模型参数。
算法基本步骤如下:
1)利用图像的色彩、灰度、边缘、纹理等信息对异源图像分别进行分割,提取区域特征;
2)进行搜索匹配,在每一匹配位置将实时图与基准图的分割结果进行融合,得到综合分割结果;
3)利用分割相似度描述或最小新增边缘准则找出正确匹配位置。
设实时图像分割为m个区域,用符号{A1,A2,…Am}表示,其异源基准图像分割为n个区域,用符号{B1,B2,…Bn}表示。分割结果融合方法如下:
在每一个匹配位置,即假设的图像点对应关系成立时,图像点既位于实时图中,又位于其异源基准图像中,则融合后区域点的标识记为:(A1B1, A1B2…,
A2B1, A2B2,…)。标识AiBj表示该点在实时图中位于区域i,在基准图中位于区域j。算法匹配过程如下图所示: